Котик М.Г., Павлов А.В., Пашковский И.М. Летные испытания самолетов
Подождите немного. Документ загружается.

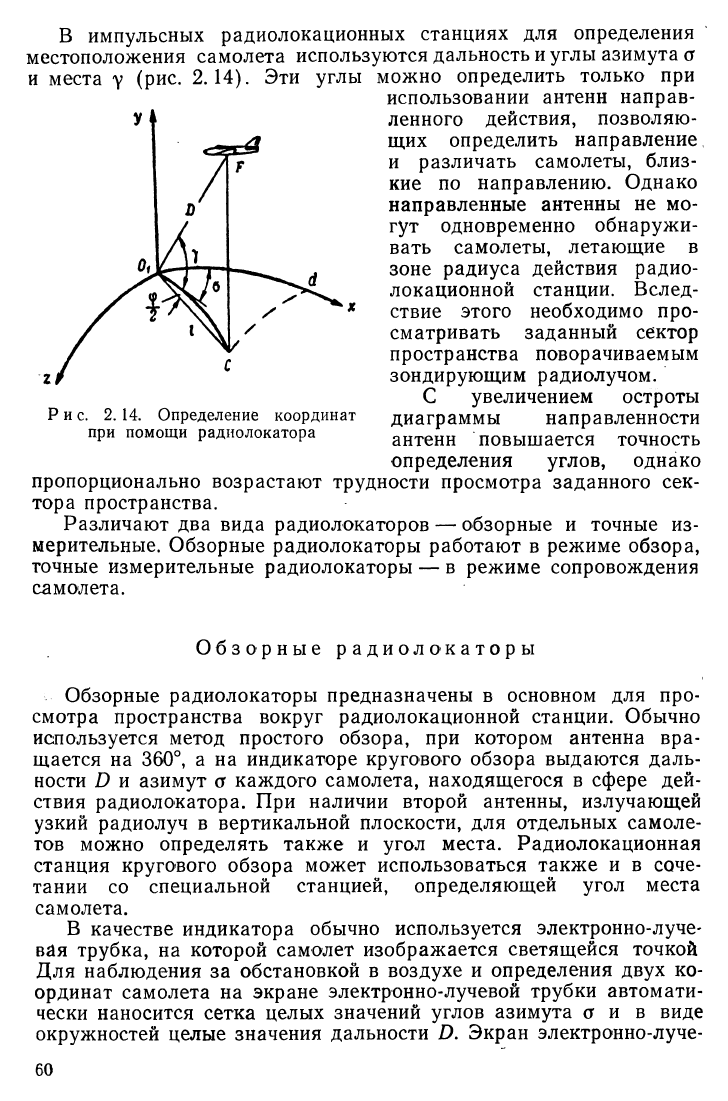
В импульсных радиолокационных станциях для определения
местоположения самолета используются дальность и углы азимута а
и места у (рис. 2.14). Эти углы можно определить только при
использовании антенн направ
ленного действия, позволяю
щих определить направление
и различать самолеты, близ
кие по направлению. Однако
направленные антенны не мо
гут одновременно обнаружи
вать самолеты, летающие в
зоне радиуса действия радио
локационной станции. Вслед
ствие этого необходимо про
сматривать заданный сектор
пространства поворачиваемым
зондирующим радиолучом.
С увеличением остроты
диаграммы направленности
антенн повышается точность
определения углов, однако
пропорционально возрастают трудности просмотра заданного сек
тора пространства.
Различают два вида радиолокаторов — обзорные и точные из
мерительные. Обзорные радиолокаторы работают в режиме обзора,
точные измерительные радиолокаторы — в режиме сопровождения
самолета.
Обзорные радиолокаторы
Обзорные радиолокаторы предназначены в основном для про
смотра пространства вокруг радиолокационной станции. Обычно
используется метод простого обзора, при котором антенна вра
щается на 360°, а на индикаторе кругового обзора выдаются даль
ности й и азимут а каждого самолета, находящегося в сфере дей
ствия радиолокатора. При наличии второй антенны, излучающей
узкий радиолуч в вертикальной плоскости, для отдельных самоле
тов можно определять такж е и угол места. Радиолокационная
станция кругового обзора может использоваться такж е и в соче
тании со специальной станцией, определяющей угол места
самолета.
В качестве индикатора обычно используется электронно-луче-
вая трубка, на которой самолет изображается светящейся точкой
Для наблюдения за обстановкой в воздухе и определения двух ко
ординат самолета на экране электронно-лучевой трубки автомати
чески наносится сетка целых значений углов азимута а й в виде
окружностей целые значения дальности й. Экран электронно-луче
Р и с. 2.14. Определение координат
при помощи радиолокатора
60
вых трубок можно фотографировать и после обработки получать
траекторию полета самолета. Погрешность в определении траекто
рии достигает нескольких километров.
Точные измерительные
радиолокаторы
Измерительным радиолокатором одновременно определяются
дальность от радиолокатора-до самолета Д углы азимута а и ме
ста у (рис. 2. 1 4 ) .'Точные измерительные радиолокаторы имеют
остро направленные антенны (отсутствует широкий обзор) и вслед
ствие этого, как правило, не могут обнаружить самолет без спе
циальных указаний о его ориентировочном местоположении, полу
чаемых от оператора обзорного радиолокатора.
После обнаружения самолета, траектория которого должна из
меряться, антенна радиолокатора может быть переведена на ре
жим автоматического сопровождения самолета.
При работе с радиолокатором можно использовать как пассив
ный, так и активный метод. При пассивном методе радиолокатор
принимает отраженную волну от самолета, мощность которой за
висит от дальности и размеров самолета,
При активном методе на самолете устанавливается приемоот-
ветчик, который усиливает и ретранслирует принятый сигнал.
Преимуществом активного метода являются увеличение дальности
действия радиолокатора и обеспечение уверенного автоматического
сопровождения самолета антенной радиолокатора. При активном
методе необходимо учитывать время задержки сигнала в приемо-
ответчике. Формулы для определения координат самолета легко
получают из рис. 2.14. Из треугольников 0\РС и 0\С (1 имеем
^=1> з1п(у + - |- ) ;
Х = И с о з + - у - ) С О З о ;
2 = /)с 0 5 ^ у + - ^ 1 8Й1
(2.55)
где
<р Р с о з у
[р а д \,
2 2Л
Я — радиус Земли для данной местности.
Погрешности в определении координат будут равны
Ъу=У(ЪО зШ у^-Н& у^соз V)2;
Ьх— У {ЬЭ соз у соз о)2- | - э т у соз а)2-|-(8о.О соз V з т о)2;
Ьг= У (ЪР соз у з т о)2 -{- (8уД з1п у з т о)2 -|- (8аО соз V соз о)2,
где Ш , Ву, 8о —случайные погрешности измерения дальности
и углов ? и а.
(2. 56)
61
Как видно из формул, погрешность в определении координат
зависит от положения самолета относительно радиолокатора и ле
жит в пределах от 15 до нескольких десятков метров.
Вблизи земли зона действия радиолокатора сильно ограничена
влиянием отраженных сигналов от зданий, леса и т. п.. Радиолока
торы ограничены также и по максимальному углу места -ушах (над
локатором существует «мертвый конус»).
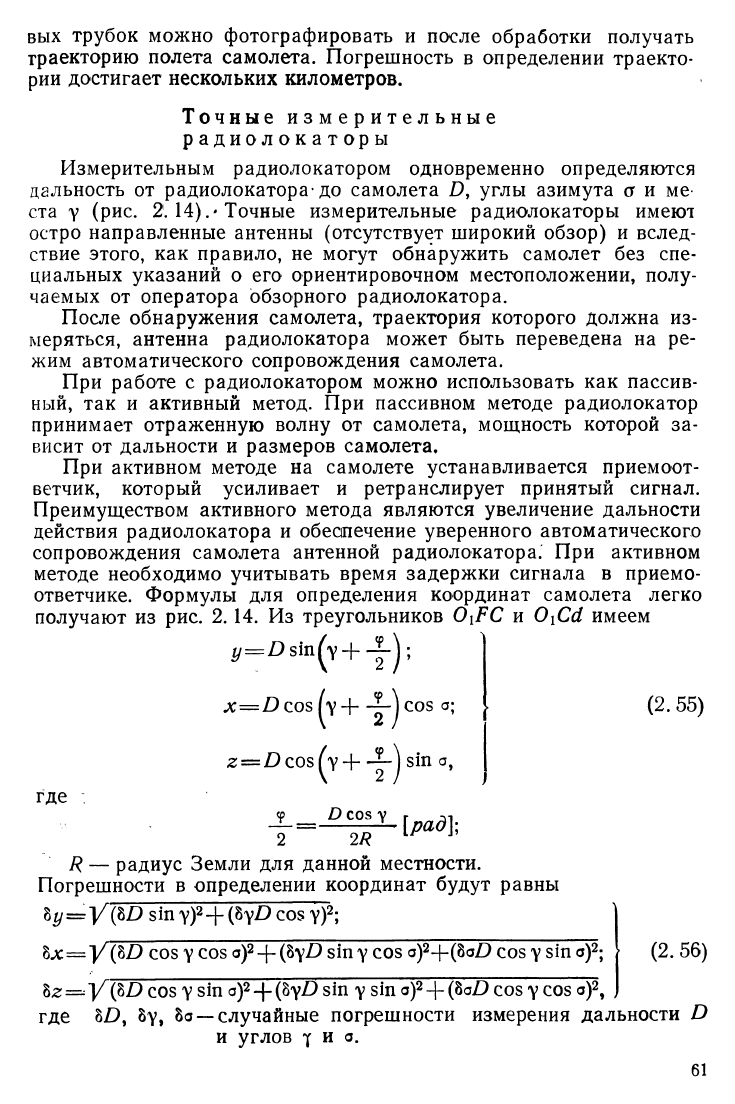
Кинотеодолитный метод* основан на одновременной засечке са
молета двумя кинотеодолитами, установленными на расстоянии
(базе) В друг от друга — в точках Ох и 0 2 (рис. 2. 15). В момент
засечки самолета регистрируются два угла азимута аь (*2 и два угла
места -уь у2.
Размер базы В точно измеряется геодезическим способом. Возь
мем начало координат в точке Оь ось х направим вдоль базы,
ось у — вертикально вверх, ось г — перпендикулярно к ним. Обо
значим текущие координаты самолета через х , у, г. Из треугольни
ков 0\С 0 и 0 2СД имеем
Кинотеодолитный метод
У
Рис. 2.15. Определение координат при помощи кино-
теодолитных станций
г = о1 = ( В —х)\% (Ш — а2),
откуда
— 81п (о2—
~ _ В д2 ^ °1 2 5‘п 32 5'П °1
°1 8Ш(а2— Я!)
(2. 57)
(2. 58)
62
Из треугольника ОхРС имеем
-В
81П 02 8Ш^У1+ - у )
81П (02—0]) С08(\>1 +
(2. 59)
где
?! =
В
81П а2
7? 81П
Я
<йп (а2 — а^)
7? — радиус Зрмли для данной местности.
Для уточнения данных при определении высоты у с помощью
кинотеодолита используется второе выражение для координаты у,
полученное из треугольника 02РС:
у— в
■ I ? 2 \
31П0] 81П I у2 + Ту I
81п(о2— о,) С08 (Уг + Уг)
■а У,
(2. 60)
где
? 2 =
В
81П 01
Я 81П а2 Я 81П (о2—О!) ’
Ау — превышение второго кинотеодолита над первым.
При определении погрешности измерения координат следует
иметь в виду, что база В измеряется с высокой точностью. Следо
вательно, погрешностью в измерении базы можно (пренебречь, при
няв 6В = 0. Принимая 601 = 602 = 67 = 60, легко получить выражения
для определения погрешностей при измерении координат:
8* = -
-------
------------У8т^2а1-\-зт22а2 =
2 81П2 (а2 — с^)
=^7
^[(х ~ В) (х2
+22)12 + {*
[{х ~ В)2 +г2]^’
Ъг=-
ВЬа
81п2(а2— 01)
5а
]/гз т 4о1-(-зт4о2 =
У ( х 2 + г*? + [(х - В у + г * ]> ;
Ьу,
81П2 (о2' ~ 05 )
X
X 1 / ^ ё 2 'У1[з 1П2 а2 С032(о2— а Л + з т 2 01]_[_вш2 а2 51п2(°2
------^ ) _
I/ С084\>!
=УГ г \ / ' [М х-В )+ гЦ Щ (х-В у+ г^
2 (х*+у*+г*)В*г%
^ у 2 ( Х 2 + г 2 ) *
(2. 61)
где 6а — случайная погрешность в измерении углов.
Как видно из формул, погрешности определения координат тем
больше, чем больше база В и ^погрешность измерения угла 60; эти
63
погрешности также зависят от положения самолета относительно
базы.
Для точного измерения углов в кадрах кинотеодолитов одно
временно фотографируются углы положения оптических осей объ
ективов сто и уо и положение самолета. Для внесения поправок на
положение самолета относительно оптической оси объектива кино
теодолита каждый кадр обрабатывается на специальном оптиче
ском устройстве — компараторе.
После определения поправок рассчитываются фактические
углы визирования кинотеодолита на самолет по формулам
о = о0 + До;
Т = Уо + УА.
где о 0 и % — углы, характеризующие положение оптической оси
объектива кинотеодолита;
Д о и ду—-поправки на положение самолета по углам азимута и
места.
Точность измерения углов в зависимости от типа кинотеодолита
и применяемого объектива лежит в пределах от 20 сек до 2 мин.
Размеры кинотеодолитных баз выбирают исходя из задач, кото
рые ставятся перед кинотеодолитной базой. Для определения по
правок приемников воздушного давления создаются кинотеодолит-
ные базы длиной в 15—20 км. Эти базы обычно используются и для
регистрации рекордов скорости и высоты. Для определения взлетно-
посадочных характеристик самолетов создаются базы длиной по
рядка 3 км.
Кинотеодолиты, применяемые на малых базах (3 км), имеют
объективы с фокусным расстоянием до 1— 1,5 м. Кинотеодолиты,
применяемые на больших базах, имеют объективы с фокусным рас
стоянием до 3 м.
В зависимости от типа кинотеодолитных станций киносъемка
производится с частотой 1—4 кадра в секунду или 10—30 кадров
в секунду. Частота съемки задается точными часами.
При больших кинотеодолитных базах кинотеодолиты на само
лет наводятся при помощи измерительного радиолокатора и спе
циального согласующего (учитывающего паралакс) устройства,
управляющего одновременно несколькими кинотеодолитами.
Связь между кинотеодолитами, согласующим устройством и ра
диолокатором обычно осуществляется при помощи специального
кабеля; при временной установке кинотеодолитов используется ра
диосвязь.
Радиолокатор только наводит кинотеодолит на самолет, а за
тем операторы самостоятельно следят за самолетом, наблюдая за
ним в специальные визирные трубы, установленные на кинотеодо
лите. При работе на малой базе оператор производит самостоя
тельно поиск самолета. При хорошей видимости самолета опера
тор может его сопровождать и фотографировать на расстоянии до
64
30—35 км. Если фотографирование необходимо производить при
больших расстояниях, то на самолете устанавливают специальные
трассеры (пороховые шашки, оставляющие за собой при горении
хорошо видимый с земли огневой факел), которые включаются
летчиком по команде с земли.
Точность измерения координат на малых базах лежит в преде
лах от долей метра до нескольких метров, а на больших базах —
от нескольких метров до нескольких десятков метров.
Фазовый метод
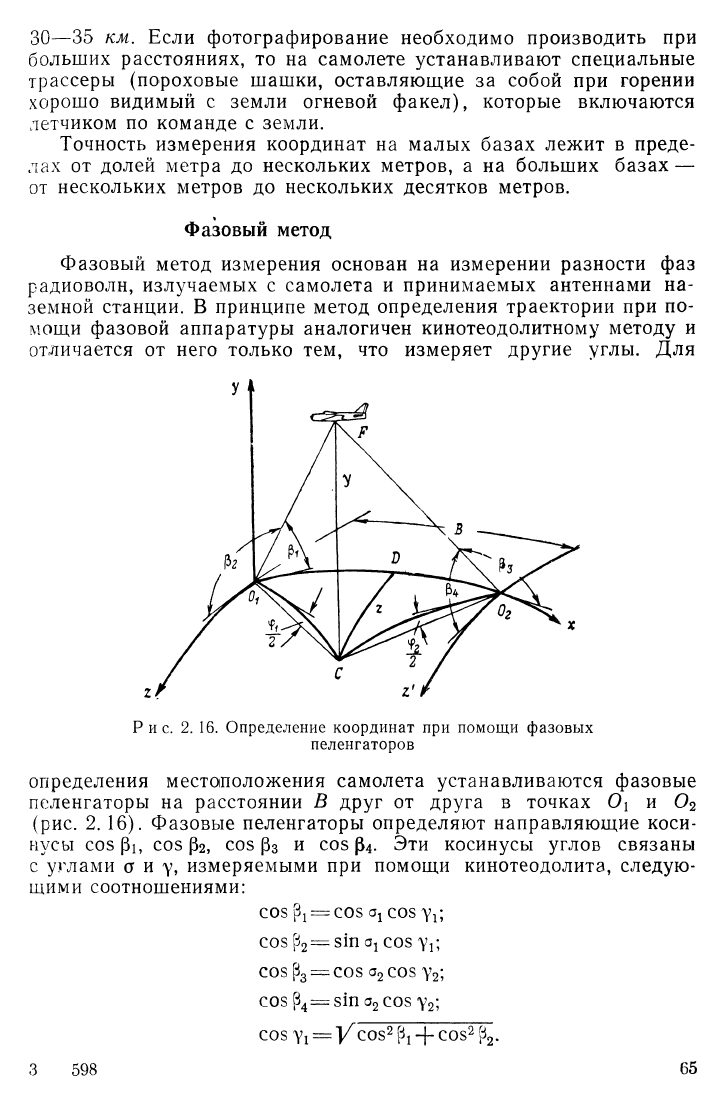
Фазовый метод измерения основан на измерении разности фаз
радиоволн, излучаемых с самолета и принимаемых антеннами на
земной станции. В принципе метод определения траектории при по
мощи фазовой аппаратуры аналогичен кинотеодолитному методу и
отличается от него только тем, что измеряет другие углы. Для
Р и с . 2. 16. Определение координат при помощи фазовых
пеленгаторов
определения местоположения самолета устанавливаются фазовые
пеленгаторы на расстоянии В друг от друга в точках 0 { и 0 2
(рис. 2. 16). Фазовые пеленгаторы определяют направляющие коси
нусы соз (Зь соз (З2, соз (Зз и соз р4. Эти косинусы углов связаны
с углами а и у, измеряемыми при помощи кинотеодолита, следую
щими соотношениями:
соз ^ = СОЗ аг СОЗ УГ,
СОЗ р2= 5 Ш СОЗ
СОЗ р3 = СОЗ а2СОЗ у2;
СОЗ р4=51П а2СО§ у2;
соз уг = У соз2 -(- СОЗ2 р2.
3 598
65
Расчетные формулы для определения координат траектории при
помощи фазовых пеленгаторов аналогичны формулам для кинотео
долитов и могут быть получены в следующем виде:
х = В
соя соя (34
СОЯ З1 соя (34— соя р2 С08 [
г = В
СОЯ СОЯ
СОЯ р! СОЯ {34 — СОЯ р2 СОЯ (
СОЯ — У 1 — С0Я2 ^ — С0я2|32 •
У = В С 0 8 р 4
СОЯ -
У 1— С0я2р1— С0я2^
■ 81П 91
----
г -г-
---
----- ~ -Т
у С052р1 + СОз2р2
X
где
+ 8П1 У С0Я2 -|- С0Я2 Р2
(соя р2 СОЯ Р4 — СОЯ Р2 СОЯ Рз) ’
СОЯ р4 У С0я2 ^ + С0Я2 р2
В _
Я
С08 0} С08 р4 — СОЯ р2 СОЯ Р3
(2. 62)
— радиус Земли для данной местности.
Фазовый метод является активным методом и позволяет без
специального поиска зафиксировать положение самолета, излучаю
щего радиоволны определенной частоты. Для излучения радиоволн
на самолете устанавливаются генератор и антенна. Недостатком фа
зового метода является недостаточная точность на малых высотах.
Определение скорости движения самолета
по траектории
Зная координаты х, у и г как функции времени т, легко подсчи
тать скорость самолета по приближенной формуле
V т —
й1 _
с1Т
V , -
А *
хп х п — 1 .
А т
^п Т„_1
Уу-
_ Ьу
_ Уп— Уп- 1 .
Ат
т п тп— 1
V ,-
А г
2п г п— 1 .
А т
^п Ъп~ 1
Ах, Ду, Аг — приращения координат самолета за время Дт.^
66
Таким способом определяется скорость в земной системе коор
динат, а при Уу — О— путевая скорость, т. е. скорость относительной
земли, а не относительно воздуха.
Точность определения составляющих скорости в основном опре
деляется точностью измерения координат, так как при измерениях
траектории должны применяться точные часы, обычно кварцевые,
погрешностью которых можно пренебречь.
Погрешности в определении скоростей Ух, Уу и Уг будут равны
'
Т/1-1
ЬУу=
-----
1
-----
У Ъ уп-\- Ъуп_ь
Т'П ^п— 1
ЪУг =
-----
-----
У Ъг\ + Ь 4 - и
Тп—
Как видно из формул, погрешность в определении составляющих
скорости тем больше, чем меньше выбранный интервал дифферен
цирования по времени. При полете самолета с постоянной скоро
стью интервал времени следует выбирать как можно большим.
Погрешность определения результирующей скорости
ЬУт = ~^ У У № 1 + У%У\ + У\ЪУ\. (2.64)
Относительная погрешность в определении скорости равна
^ г о = ~ = - ^ , (2-64')
V т
где
1
= У(*п
- - « л - 1 ) 2 +
(гп
-
гп-
1
?
+
(Уп ~ У п-
1
?
:
и =■ у -
У
(Х „ - Л „ _ 1) 2 + (*п - г „ - , ) 2 ( » 4 4 - & 4 - 0 +
“ К У л —
Ул-
0 2 ( 8 «/л + ^ л - 0 •
2.5. МЕТОДИКА ОПРЕДЕЛЕНИЯ
АЭРОДИНАМИЧЕСКИХ ПОПРАВОК ПВД
Необходимость определения аэродинамических поправок во
всем диапазоне скоростей полета самолета привела к созданию
ряда методов тарировки ПВД в полете. Однако, несмотря на их
разнообразие, все они сводятся к определению зависимости аэро
динамических поправок для статической дра и динамической бра.о
камер ПВД от числа М полета или, для малых скоростей полета,
ОТ приборной скорости Упр.испр.
Основными методами тарировки ПВД являются: метод тари
ровки по скорости и барометрический метод.
3* 67

Метод тарировки приемника воздушного давления, в основу
которого положено определение аэродинамической поправки к ско
ростному напору б^сш = бра.о—б/?а путем сравнения истинной ско
рости полета самолета относительно воздуха со скоростью, изме
ренной на тарируемом самолете, называют методом тарировки ПВД
по скорости.
Метод тарировки приемника воздушного давления, в основу
которого положено непосредственное определение аэродинамиче
ской поправки бра к статической системе приемника, называют
барометрическим.
Тарировка ПВД обычно производится в горизонтальном полете
при различных числах М. При этом с помощью точных приборов
самописцев регистрируются скорость Удр.испр, высота ЯПр<ИСЩ)(/?нпр)
и температура заторможенного потока Гпр.испр.
Измерение геометрической высоты над данным уровнем Я г, ско
рости полета самолета V и ее направления срс производится с по
мощью радиолокаторов, кинотеодолитов или фазовых пеленгаторов.
Для определения зависимости истинного значения температуры
наружного воздуха ТНу скорости ветра 1^, ее направления ср^у
и атмосферного статического давления рн от геометрической вы
соты Яг используются два метода:
1) зондирование атмосферы с помощью шара-зонда. При этом
измеряется температура наружного воздуха ТНу скорость УР и на
правление скорости ветра. Геометрическая высота Яг шара-
зонда измеряется указанным выше способом;
2) зондирование атмосферы с помощью эталонного самолета,
аэродинамические поправки которого известны. При этом опреде
ляется температура наружного воздуха ТН) скорость и направ
ление ветра и атмосферное статическое давление рн на высоте
полета. Геометрическая высота Яг эталонного самолета измеряется
указанным выше способом.
Зондирование атмосферы производится в районе высот полета
тарируемого самолета, до или после его полета. Необходимо, чтобы
интервал времени между зондированием атмосферы и полетом тари
руемого самолета был минимальным.
По полученным данным строят графики изменения измеряемых
параметров в зависимости от геометрической высоты 7я = /(Я г),
фЖ= /(Я г), 1^=/(Яг) и рн =}(Нт). По данным графикам и геомет
рической высоте полета тарируемого самолета определяются истин
ные значения указанных параметров атмосферы.
Метод тарировки ПВД по скорости
В данном случае, прежде всего определяется путевая скорость
самолета УпуТ, которая согласно формуле (2. 63) равна
I / ^
__
"У (х п х п—1)2+ п 2п—1)2 + (Уп Уп—1)2
пут . _ >
ах X п — ^п—1
при ЭТОМ Уу~ 0.
68
Зная путевую скорость самолета Упут, ее направление, скорость
ветра № и ее направление, используя теорему косинусов для косо
угольных треугольников, легко определить истинную горизонталь
ную скорость самолета относительно воздуха
V = У "^ 2пут + Ц72-21ГКпутсоза, (2. 65)
где а — угол между векторами путевой скорости самолета и -ско
рости ветра.
Индикаторная скорость самолета определяется по фор
муле (2. 8)
У, = У У А,
где А — относительная плотность в фактических условиях полета,
определяемая по формуле (2.7)
Д = 0,3793-^-.
Тн
Земная индикаторная скорость определяется по формуле (2. 22)
У 1з= У , - Ъ У еж.
Вычитая из найденной земной индикаторной скорости У*3 пока
зания прибора самописца или указателя скорости Упр.испр, получим
искомую аэродинамическую поправку, определяемую по фор
муле (2. 32)
Vь з ^пр.испр*
или, используя таблицу 2. 1 и формулы (2. 1) и (2.30), можно опре
делить значения скоростных напоров ^Сж, <7пр и дЦсж-
Для тихоходных самолетов, используя номограмму (см. рис.
2.5), строят тарировочные графики поправок бУа= /( Упр.испр) и
бЯа=/(Уприспр, Нр) (рис. 2.17), определяемых по формулам
(2.35) и (2.37).
Для скоростных самолетов строят тарировочный график зависи
мости отношения бдСж= —^ от числа М. Необходимо отметить,
#пр
что с помощью данного метода тарировки ПВД определяется сум
марная поправка к скоростному напору б^сж, поэтому для скорост
ных самолетов, имеющих поправку 6ра.0 к измеряемому полному
давлению, невозможно определить аэродинамические поправки
6Яа и 6М, так как для их определения необходимо знать поправку
бра к измеряемому статическому давлению. Метод определения
последней дан ниже.
69