Котик М.Г., Павлов А.В., Пашковский И.М. Летные испытания самолетов
Подождите немного. Документ загружается.

Количественные показатели предельной и эксплуатационной
маневренности могут существенно различаться между собой.
Вследствие недостатков управляемости и устойчивости, а также
конечной (иногда сравнительно большой) величины времени вы
пуска и уборки воздушных тормозов, времени набора и сброса
тяги двигателей, наличия аэродинамической тряски эксплуатаци
онные маневренные характеристики самолета могут быть заметно
ниже его предельных маневренных характеристик. Предельные
маневренные возможности самолета необходимо знать для того,
чтобы выявить резервы для улучшения эксплуатационной манев
ренности. Этими резервами могут быть, например, улучшение ха
рактеристик управляемости и устойчивости, ослабление аэродина
мической тряски (установкой аэродинамических гребней на крыле,
турбулизаторов и др.), увеличение эффективности рулей и другие
средства, позволяющие расширить диапазон используе&ых летчи
ком скоростей (чисел М), высот полета и перегрузок; а также
увеличить возможную быстроту их изменения в полете.
Управляемость и устойчивость самолета влияют как на количе
ственные, так и на качественные характеристики маневреннос
ти, в частности, на возможную точность пилотирования самоле
та, т. е. на точность выдерживания летчиком или автопилотом
заданных траекторий полета при выполнений различных манев
ров.
Маневренность самолета в целом не может быть охарактеризо
вана каким-либо одним обобщающим критерием, по величине кото
рого можно было бы оценивать маневренные качества самолета.
Для оценки маневренных качеств самолета необходимо находить
из летных испытаний характеристики, определяющие общие пара
метры маневров (максимальные возможности самолета в любых
частных маневрах) и не зависящие от индивидуальных особенно
стей пилотирования. Использование для оценки маневренности са
молета только частных ее показателей не позволяет производить
анализ летных качеств самолета с необходимой полнотой. Наибо
лее правильно было бы использовать в качестве критериев для
оценки общих показателей маневренности координаты центра тя
жести самолета в земной системе осей координат и их производ
ные по времени. Однако это связано с применением весьма гро
моздкого математического аппарата, что усложнило бы практиче
ское решение рассматриваемой задачи.
9.2. ПЕРЕГРУЗКА
Прежде чем приступить к анализу маневренных характеристик
самолета рассмотрим несколько подробней понятие перегрузки.
Перегрузкой называется вектор п, равный отношению результи
319
рующей всех действующих на самолет внешних сил (кроме сил
тяжести и инерции) к весу самолета:
п = ^ ,
а
где Л — вектор результирующей всех действующих на самолет
внешних сил (кроме силы тяжести и силы инерции);
С — вес самолета (скалярная величина).
Величина К является геометрической суммой следующих сил:
результирующей аэродинамической силы и тяги двигателей, а так
же силы натяжения буксировочного или заправочного троса (у са
молета-буксировщика или самолета-заправщика), силы реакции
земной поверхности (при касании земли), силы удара о посторон
ний предмет (при столкновении с посторонним предметом, напри
мер, при попадании в аэродромные улавливатели), силы натяже-
жения лямок тормозного парашюта (посадка с использованием
тормозного парашюта), тяги ускорителей (взлет с использованием
ускорителей), реакции катапультирующего самолет устройства
(взлет с катапульты) и др.
Из приведенной формулы видно, что направление перегрузки
совпадает с направлением результирующей всех внешних сил.
Удобней рассматривать не сам вектор перегрузки п, а его проек
ции на оси координат. При рассмотрении общих показателей
маневренности самолета пользуются проекциями вектора пере
грузки на оси скоростной системы координат (хуг). Из материалов
летных испытаний непосредственно получают проекции вектора
перегрузки на оси связанной системы координат \х\У\г\).
Проекции вектора перегрузки на оси Ох или Охх будем в даль
нейшем для краткости называть продольной перегрузкой (соответ
ственно в скоростной или связанной системе координат). Анало
гично проекции вектора перегрузки на оси Оу или Оух будем назы
вать нормальной перегрузкой, а проекции его на оси Ог или Ог 1 —
боковой перегрузкой (также соответственно в скоростной или свя
занной системе координат).
Таким образом проекции вектора перегрузки на оси скорост
ной системы координат определяются следующими формулами:
Я*
продольная перегрузка п = — ;
О
Ку
нормальная перегрузка пу — — \
о
боковая перегрузка пг — “ Т"»
(9.1)
где Ну и /?г — проекции результирующей всех внешних сил
соответственно на оси Ох, Оу и Ог.
320
Если на самолет действуют только аэродинамическая сила и
тяга двигателей (в большинстве случаев действуют эти две силы),
то величины Ях, к у и Яг определяются из следующих выражений:
Ях — Р соз (а — ср) соз р — сх8д соз р -{- сг8д з т р;
Ку=Р$\ъ{а — ч)-\-су8ч\
= — Р соз (а — ср) з т р + з т р + сг8д.
Здесь ф — угол между направлением тяги двигателей и хордой
крыла.
В частном случае установившегося прямолинейного горизон
тального маневра в скоростной системе осей координат Кх = Яг=О,
а
К у= 0
и, следовательно,
пх
=
п2
= 0, а
пу=
1. Другой частный слу
чай — установившееся отвесное пикирование самолета. В скорост
ной системе осей координат для этого случая
пу = пг
= 0, а
пх —
— 1 (так как
Нх —
—О).
В общем случае криволинейного пространственного маневра,
происходящего с изменением скорости, высоты и направления
полета в вертикальной и горизонтальной плоскостях (например,
боевой разворот)
пх ф
0;
пу ф 0
и
п2ф
0.
Такой вид движения самолета по пространственным траекториям
наиболее распространен в воздушном бою и при выполнении фи
гур пилотажа.
При проведении летных испытаний часто требуется определять
знак действующих на самолет (летчика) перегрузок в связанной
системе осей координат (их обозначают индексом «1»). В этом слу
чае можно пользоваться следующим правилом:
пх\> 0 — летчика прижимает к спинке сиденья (разгон
самолета);
пх 1<0 — летчика отрывает от спинки сиденья (торможение
самолета);
пу\> 0 — летчика прижимает к чашке сиденья (ввод в горку,
вывод из пикирования);
Пу1 < 0 — летчика отрывает от чашки сиденья (полет на
спине);
л21>0 — летчика прижимает к левому борту (левое сколь
жение) ;
пХ1 < 0 — летчика прижимает к правому борту (правое
скольжение).
11 598 321
9.3. УРАВНЕНИЕ МАНЕВРЕННОСТИ
Анализ и расчет характеристик маневренности самолета произ
водятся при помощи следующей системы уравнений:
1
ау
■31Г1 (
Пг =
<а
У'Ыи
■соз 0 § т у;
— оОгЗШ'У
соз 0 ’
ав . ,
— г=ш 1/8 т у + а)гс05у;
аг
<И
йхх
(И
Лу?
(И
<1 * 8
К со§ у — <*>*§1п у) 0;
V соз ф соз 6;
V 51П 6;
— 1/ зтфсоз 0;
си
^х ^РУД» ^в.т» ^мех» ^шасси)
ПУ— ОС, Р, у ^ р у д » ^в.т»
К г ~ Р
(М , а, В5
у ^ 9
^руд, & в т, &
мех» шасси/
мех» шасси
м = ^ .
а
(9.2)
где пх, _пу, п2 и (о^, сог— перегрузки и угловые скорости враще
ния самолета в скоростной системе
осей координат;
хё, уё и гё— координаты центра тяжести самолета
в земной системе осей координат;
^руд— перемещение (отклонение) рычага
управления двигателем;
&вл,— перемещение воздушных тормозов;
&мех— перемещение органов механизации;
&Шасси— перемещение шасси.
В уравнениях (9.2) углы между осями земной и скоростной
систем координат определяются тремя поворотами самолета на
эйлеровы углы г|), 0 и у (при условии, что вначале направления
322
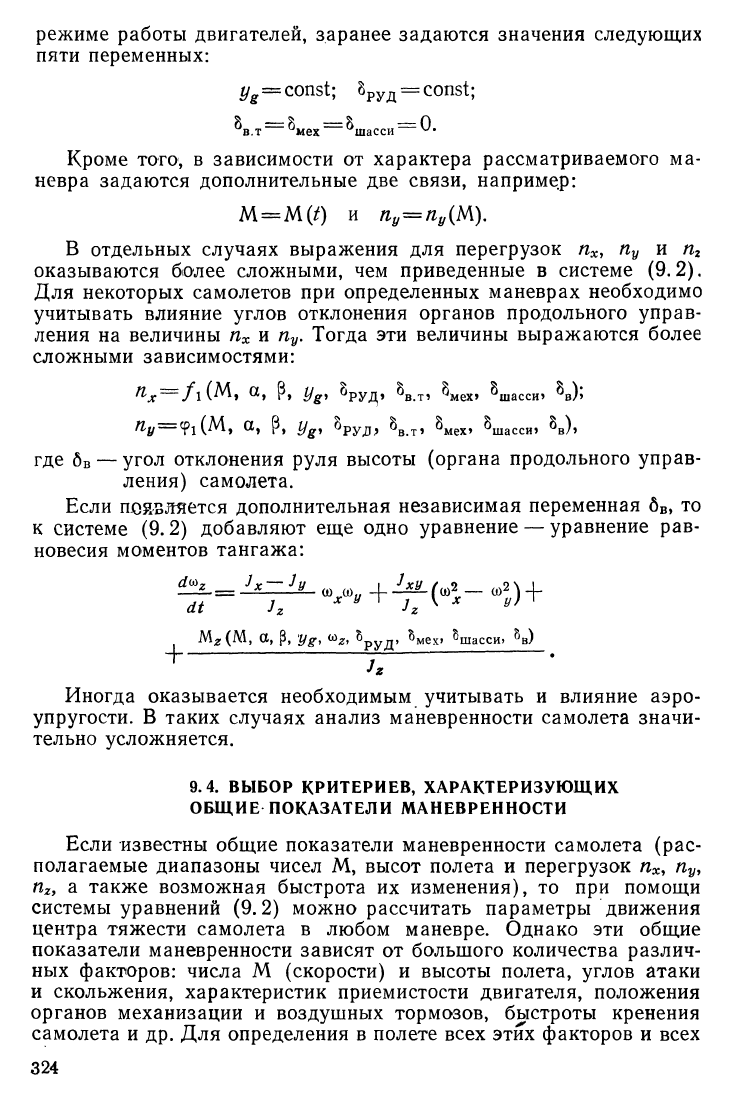
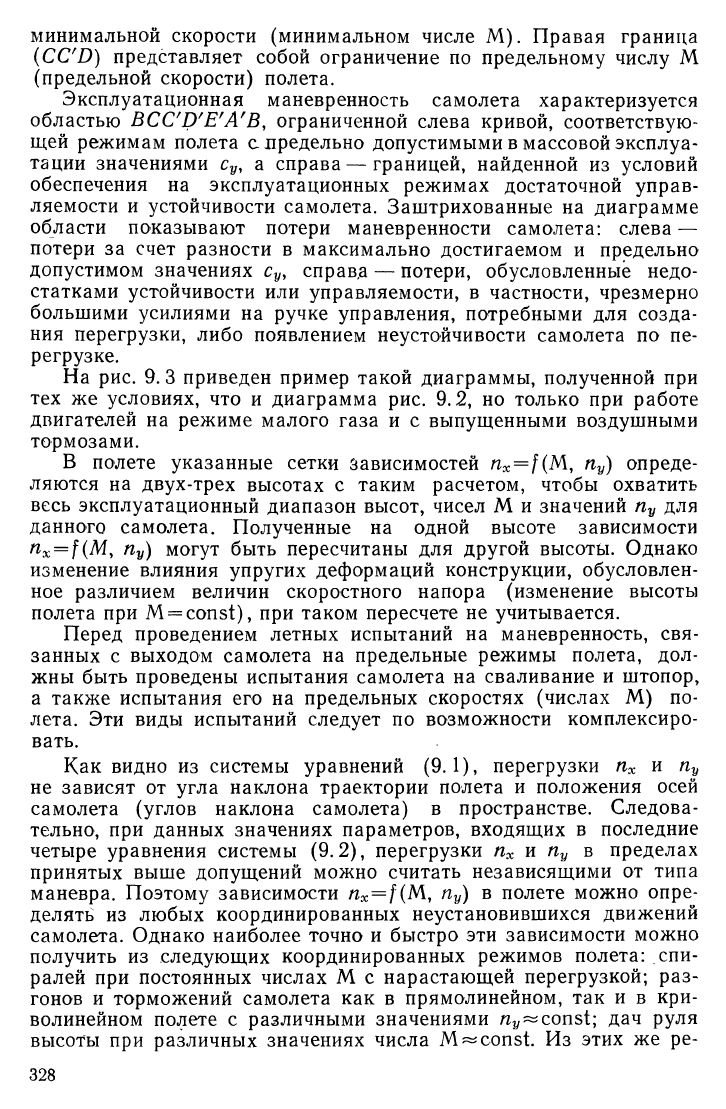
соответствующих осей совпадают). Первый поворот (рис. 9.1)
производится на угол я|), второй поворот — на угол 0 и третий —
на угол -у. Угол г)? называется углом рыскания самолета, угол 9 —
углом наклона траектории полета и у — углом крена скоростной
системы осей координат (в дальнейшем для краткости будем на
зывать его просто углом крена).
Последние три уравнения системы (9. 2) определяют зависимо
сти продольной, нормальной и боковой перегрузок от числа М и
Р и с . 9.1. Углы перехода от земных осей коор
динат к скоростным
высоты (Н = уё) полета, от углов атаки а и скольжения (3, а также
от режима работы двигателей бРУД , положения воздушных тормо
зов б в.т, положения органов механизации б Мех и шасси бщасси- Эти
зависимости даются обычно в виде графиков.
Система уравнений (9.2) является системой общих уравне
ний маневренности самолета, которая позволяет определять траек
тории движения центра тяжести самолета в любом пространст
венном маневре. Тринадцать уравнений этой системы содержат
двадцать независимых переменных: М, У, а, р, у> 0, о*, соу, ш2,.
пх, Пу
,
п2у
хё) у г * ,'б р у д , бв.т, бмех, бшасси- Поэтому при решении
системы уравнений (9.2) нужно заранее задаться законом измене
ния по времени каких-либо семи из перечисленных независимых
переменных либо получить дополнительные уравнения, описываю
щие новые связи этих переменных. Так, при рассмотрении манев
ров в горизонтальной плоскости, выполняемых с убранными шасси,
воздушными тормозами и органами механизации при постоянном
И*
323
режиме работы двигателей, заранее задаются значения следующих
пяти переменных:
уё = сопз!; йруд = сопз1;
_
*
_
/"V
в.т мех шасси
Кроме того, в зависимости от характера рассматриваемого ма
невра задаются дополнительные две связи, например:
М = М(/) и Пу=Пу(Щ.
В отдельных случаях выражения для перегрузок пХу пу и п2
оказываются более сложными, чем приведенные в системе (9.2).
Для некоторых самолетов при определенных маневрах необходимо
у
читывать влияние углов отклонения органов продольного управ
ления на величины пх и пу. Тогда эти величины выражаются более
сложными зависимостями:
^в.т^ ^мех> ^шасси» ^в)>
Лу'= С р^ М , (X, Р, ^в.т» ^мех> ^шасси» ^в)»
где бв — угол отклонения руля высоты (органа продольного управ
ления) самолета.
Если появляется дополнительная независимая переменная 6В, то
к системе (9.2) добавляют еще одно уравнение — уравнение рав
новесия моментов тангажа:
]Х - ]У . _|_ 1 ху_ /ц» _ №2Ч_|_
< И х У Т } ^ \ х у ) [
| а, р, у Ь руд, Вмех, ^шасси» ^в)
+
т.
Иногда оказывается необходимым учитывать и влияние аэро
упругости. В таких случаях анализ маневренности самолета значи
тельно усложняется.
9.4. ВЫБОР КРИТЕРИЕВ, ХАРАКТЕРИЗУЮЩИХ
ОБЩ ИЕ ПОКАЗАТЕЛИ МАНЕВРЕННОСТИ
Если известны общие показатели маневренности самолета (рас
полагаемые диапазоны чисел М, высот полета и перегрузок пх, пу,
п2, а также возможная быстрота их изменения), то при помощи
системы уравнений (9.2) можно рассчитать параметры движения
центра тяжести самолета в любом маневре. Однако эти общие
показатели маневренности зависят от большого количества различ
ных факторов: числа М (скорости) и высоты полета, углов атаки
и скольжения, характеристик приемистости двигателя, положения
органов механизации и воздушных тормозов, быстроты кренения
самолета и др. Для определения в полете всех этих факторов и всех
324
возможных их сочетаний потребовалось бы затратить чрезвычайно
много летного времени и провести большое количество расчетов.
Для упрощения решения поставленной задачи можно принять сле
дующие допущения:
1. Величина аэродинамической боковой силы в связанной с са
молетом системе осей координат и быстрота ее изменения не зави
сят непосредственно от угла атаки и определяются только ско
ростью и высотой полета.
*2. Быстрота создания крена и поворота самолета вокруг оси Оу\
связанной системы координат зависит только от скорости и высоты
полета.
3. Боковая перегрузка пг\ в связанной с самолетом системе
осей координат прямо пропорциональна углу скольжения при лю
бых значениях скорости и высоты полета.
4. Скольжение самолета не влияет на величину, направление и
быстроту изменения аэродинамических сил в плоскости симметрии
самолета.
Эти допущения позволяют производить оценку маневренных
качеств самолета исходя из рассмотрения двух типов маневров:
а) координированных маневров, в которых
0;
б) некоординированных маневров, т. е. маневров со скольже
нием, в которых
Пу^П у ,«г1.
Зная характеристики этих типов маневров, на основании при
нятых допущений можно определять характеристики любых про
странственных маневров с пуФ \ и пгФ 0 при помощи формул
пх= п Хкс.о$$-\-пл зшр;
п*=п»к;
п г ~ п г1 С 0§ § — Пху 8 *П Р-
Здесь индексом «к» отмечены перегрузки координированного
маневра, определенные при тех же числах М, высоте полета и ре
жиме работы двигателей, при которых находят и перегрузки ма
невра со скольжением (пг\).
Определяющее значение для оценки маневренных качеств само
лета имеют характеристики координированных маневров, так как
в массовой эксплуатации подавляющее большинство маневров вы
полняется без скольжения или при малом скольжении, практиче
ски не оказывающем влияния на характер движения самолета.
Принятые допущения позволили выбрать практическую систему
критериев, характеризующих общие показатели маневренности
самолета. Эти критерии удобны для практического использования
325
и вместе с тем позволяют достаточно полно определять частные
показатели маневренности и характеристики любого пространст
венного маневра самолета, возможного в массовой эксплуатации.
Критериями, характеризующими общие показатели маневренности
самолетов, являются:
1. Семейства кривых продольной перегрузки в зависимости от
скорости (числа М) полета при различных значениях нормальной
перегрузки в скоростной системе осей координат. Указанные зави
симости определяются для координированных (без скольжения)
маневров на различных высотах при крайних режимах работы
двигателей, крайних положениях воздушных тормозов, органов
механизации и шасси.
2. Семейства кривых времени накренения самолета на различ
ные углы в зависимости от скорости (числа М) полета на разных
высотах.
3. Зависимости времени выпуска и уборки воздушных тормо
зов, шасси и органов механизации, времени набора и сброса тяги
двигателей от скорости и высоты полета, характеризующие в основ
ном быстроту изменения продольной перегрузки в скоростной
системе осей координат.
4. Зависимости времени создания заданных нормальных пере
грузок (в скоростной системе осей координат) от скорости и вы
соты полета.
5. Зависимости предельных боковых перегрузок (в связанной
с самолетом системе осей координат) и углов скольжения от ско
рости (числа М) и высоты полета.
6. Зависимости времени создания боковых перегрузок (в свя
занной с самолетом системе осей координат) или углов скольжения
от скорости и высоты полета.
9.5. ОПРЕДЕЛЕНИЕ КРИТЕРИЕВ МАНЕВРЕННОСТИ
В ПОЛЕТЕ
Рассмотрим подробней каждый из перечисленных критериев
в отдельности.
Семейства кривых продольной перегрузки
Для практического проведения анализа и оценки маневренно
сти самолета удобно строить семейства кривых пх = }(М) при раз
личных значениях пу как параметра. На рис. 9.2 приведен пример
диаграммы такого типа. Эта диаграмма характеризует маневрен
ные данные самолета в полете на высоте # = сопз! при работе дви
гателей на режиме максимальной тяги, при убранных шасси, воз
душных тормозах и органах механизации, с заданным полетным
весом О и х т = соп${. Помимо семейства кривых пх=}(М, пу), на
диаграмму нанесены дополнительные кривые: АЕ — кривая, соот
ветствующая режимам полета при сущах! А'Е' — кривая, соответ
326
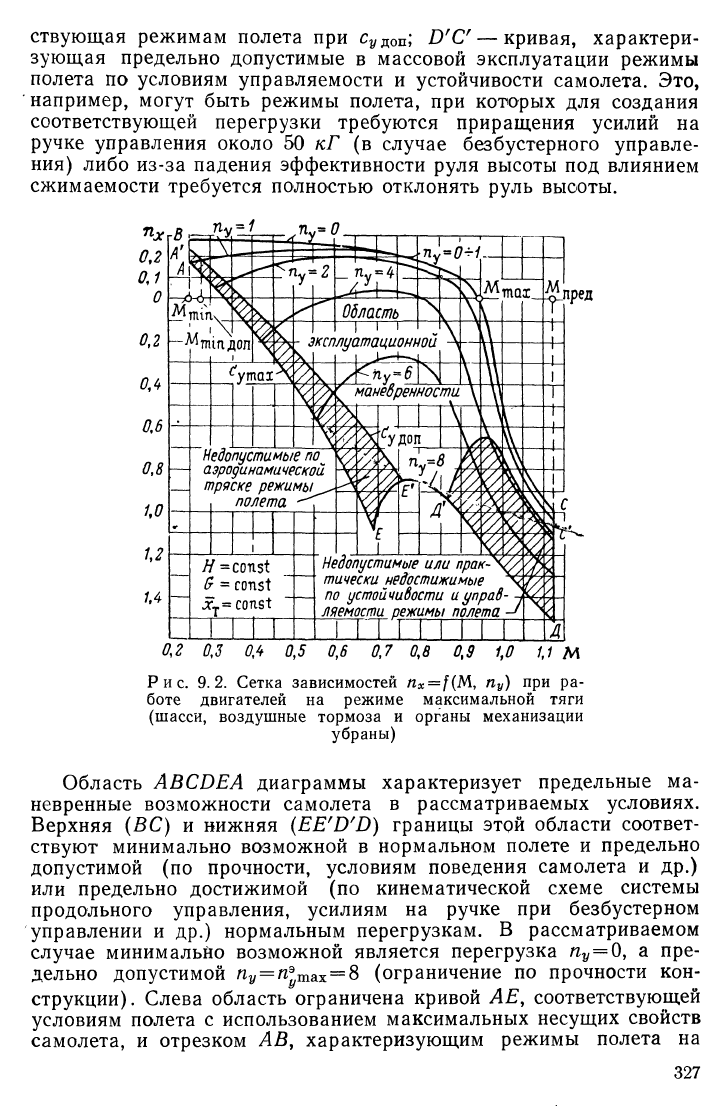
ствующая режимам полета при судоп; О'С' — кривая, характери
зующая предельно допустимые в массовой эксплуатации режимы
полета по условиям управляемости и устойчивости самолета. Это,
например, могут быть режимы полета, при которых для создания
соответствующей перегрузки требуются приращения усилий на
ручке управления около 50 кГ (в случае безбустерного управле
ния) либо из-за падения эффективности руля высоты под влиянием
сжимаемости требуется полностью отклонять руль высоты.
Пх
0,2
0 ,1
0
0,2
0,4
0,6
0,8
1,0
Ь2
1,4
0,2 0,3 0,4 0,5 0,6 0,7 0,8 0%9 1,0 1,1 М
Р и с. 9.2. Сетка зависимостей пх = !(№, п у) при ра
боте двигателей на режиме максимальной тяги
(шасси, воздушные тормоза и органы механизации
убраны)
Область АВСОЕА диаграммы характеризует предельные ма
невренные возможности самолета в рассматриваемых условиях.
Верхняя {ВС) и нижняя (ЕЕ'О'О) границы эт(?й области соответ
ствуют минимально возможной в нормальном полете и предельно
допустимой (по прочности, условиям поведения самолета и др.)
или предельно достижимой (по кинематической схеме системы
продольного управления, усилиям на ручке при безбустерном
управлении и др.) нормальным перегрузкам. В рассматриваемом
случае минимально возможной является перегрузка % =0, а пре
дельно допустимой пу = пэут&х = 8 (ограничение по прочности кон
струкции). Слева область ограничена кривой А Е, соответствующей
условиям полета с использованием максимальных несущих свойств
самолета, и отрезком АВ, характеризующим режимы полета на
327
минимальной скорости (минимальном числе М). Правая граница
{СС'Б) представляет собой ограничение по предельному числу М
(предельной скорости) полета.
Эксплуатационная маневренность самолета характеризуется
областью ВСС'Р'Е'А'В, ограниченной слева кривой, соответствую
щей режимам полета с предельно допустимыми в массовой эксплуа
тации значениями су, а справа — границей, найденной из условий
обеспечения на эксплуатационных режимах достаточной управ
ляемости и устойчивости самолета. Заштрихованные на диаграмме
области показывают потери маневренности самолета: слева —
потери за счет разности в максимально достигаемом и предельно
допустимом значениях суу справ,а — потери, обусловленные недо
статками устойчивости или управляемости, в частности, чрезмерно
большими усилиями на ручке управления, потребными для созда
ния перегрузки, либо появлением неустойчивости самолета по пе
регрузке.
На рис. 9. 3 приведен пример такой диаграммы, полученной при
тех же условиях, что и диаграмма рис. 9.2, но только при работе
двигателей на режиме малого газа и с выпущенными воздушными
тормозами.
В полете указанные сетки зависимостей пх = {(М, пу) опреде
ляются на двух-трех высотах с таким расчетом, чтобы охватить
весь эксплуатационный диапазон высот, чисел М и значений пу для
данного самолета. Полученные на одной высоте зависимости
пх = [(Му пу) могут быть пересчитаны для другой высоты. Однако
изменение влияния упругих деформаций конструкции, обусловлен
ное различием величин скоростного напора (изменение высоты
полета при М = сопз1), при таком пересчете не учитывается.
Перед проведением летных испытаний на маневренность, свя
занных с выходом самолета на предельные режимы полета, дол
жны быть проведены испытания самолета на сваливание и штопор,
а также испытания его на предельных скоростях (числах М) по
лета. Эти виды испытаний следует по возможности комплексиро-
вать.
Как видно из системы уравнений (9.1), перегрузки пх и пу
не зависят от угла наклона траектории полета и положения осей
самолета (углов наклона самолета) в пространстве. Следова
тельно, при данных значениях параметров, входящих в последние
четыре уравнения системы (9.2), перегрузки пх и пу в пределах
принятых выше допущений можно считать независящими от типа
маневра. Поэтому зависимости пх = \(М, пу) в полете можно опре
делять из любых координированных неустановившихся движений
самолета. Однако наиболее точно и быстро эти зависимости можно
получить из следующих координированных режимов полета: спи
ралей при постоянных числах М с нарастающей перегрузкой; раз
гонов и торможений самолета как в прямолинейном, так и в кри
волинейном полете с различными значениями пу~ сопз!; дач руля
высоты при различных значениях числа М — сопз!. Из этих же ре
328