Котик М.Г., Павлов А.В., Пашковский И.М. Летные испытания самолетов
Подождите немного. Документ загружается.

Если балансировочные кривые получают путем обработки за
писей неустановившегося движения самолета (разгонов, торможе
ний и спиралей), то необходимо предварительно определить вели
чину погрешностей, связанных с нестационарностью режима и,
если они окажутся значительными, привести замеренные в полете
фактические значения хода ручки управления, усилий летчика на
ней и балансировочного угла руля высоты (<рСт или бв) к условиям
установившегося полета.
Значения хВу Рв и фст, соответствующие статическим условиям
балансировки самолета, определяют по формулам
где индексом «ф» отмечены фактические величины, замеренные
в полете; Д хв .н е ст, А Р в.нест и Л ф в .нест — соответствующие поправки
на нестационарность режима.
Формулы для расчета таких поправок на нестационарность ре
жима можно получить, отправляясь от уравнения равновесия мо
ментов относительно поперечной оси самолета:
Если рассматривать при этом только плавные маневры, то при
расчете усилий на ручке управления и ее отклонений можно пре
небречь слагаемыми, связанными с первой и второй производными
по времени от скорости полета
В этом случае получают приближенные выражения, характе
ризующие изменение балансировочного угла отклонения руля вы
соты Абв, перемещение ручки управления
Ахв и изменение усилий
на ней ДРв, обусловленные нестационарностью режима и отклоне
нием самолета от заданных условий балансировки*:
* Подробный вывод этих выражений имеется в следующих работах:
И. В. Остославский и Г. С. Калачев, Продольная устойчивость и
управляемость самолета, Оборонгиз, 1951, стр. 275—282.
В. С. В е д р о в и М. А. Т а й ц, Летные испытания самолетов, Оборонгиз,
1951, стр. 299.
И. В. Остославский, Аэродинамика самолета, Оборонгиз, 1957,
стр. 422—429.
Г. С. Калачев. Показатели маневренности, управляемости и устойчивости
самолетов. Оборонгиз- 1958, стр. 63—73.
* в = Ю Ф + л-*в,
^ » = (^ .) ф+ дЛ
9ст (Тст)ф
ст.нест»
(6. 5)
сИ
229
дЯ в(г) = Р л2 ^ + Р1 - ^ - + Р ^ П У+РУ А Д ^; 1
а?"2 аг К
д*в (*) = X I + Х \ + X " д л / + ХУ А Д1/;
а&
(И V
(б.б)
где Я2", Р и Р п, Р у , X I, Х пи Х п, Х у, 8"2, 8^, 8” и ^ - постоян
ные величины, в развернутом виде определяемые следующими
приближенными формулами:
Р " = _ Т2р^г11 А - ;
АЛ Г* у
Р ПХ= - ХР*т-±-(С« ^ - П ?>' - « « „ V
^ ' у \ УЬА 1
р п = р хт т г»
\ <г св
рУ ==_ р * то,
V св
О’
х \ = - х * х х^ А -
Х * = Х
х 1
\ т с/
XV = — Х хга1/=
= ^ а„
2 ’
" = - Т?Л - з г Гф ~ т7 ~ т 1
РСУ \ °А
,'«+^1)=8Ч;
V
■ ЪХт°\г = —
2 «/V
(6. 7)
230
В формулы (6.7) входят следующие аэродинамические и кон
структивные параметры самолета:
тА*
г св
Х хт и В*1— соответственно коэффициенты
расхода продольных усилий,
хода ручки управления и руля
высоты на центровку;
О /
т =
------
масса самолета (& =
* =9,81 м/сек2) ;
^ — Т с ~ — коэффициент относительной
А плотности самолета;
2т
масштаб времени, принятого
при приведении уравнений про
дольного движения самолета
__
к безразмерной форме;
г*==1 / ~ — радиус инерции самолета отно-
V т сительно поперечной оси (/* —
момент инерции самолета отно
сительно оси г) ;
^®=— ^— производная коэффициента су
да Ла подъемной силы самолета по
углу атаки;
= ( и
----
коэффициенты момента про-
' д(* 2 ' св д(*г дольного демпфирования само
лета при освобожденном (св)
и фиксированном управлении
ь,
т гсв ~ [ ~ ”-г ) и т 1 ~ --^г — производные коэффициента
гсв 1 да ! ~ да
продольного момента самолета
по безразмерной скорости из-
“ аа
менения угла атаки а = ^ ПРИ
освобожденном и фиксирован-
1~ ^ Ааа\
ном управлении 1<а = — );
алсв и °п— коэффициенты продольной ста
тической устойчивости по пере- -
грузке при освобожденном и
фиксированном управлении;
V св и ау — коэффициенты продольной ста
тической устойчивости по ско
рости при освобожденном и
фиксированном управлении.
231
Если на неустановившееся продольное движение самолета на-
дожить дополнительно условие
-----
— = —— = 0 (т. е. условие
сИ2 сИ
/гг/ = соп§1), то выражения (6.6) существенно упрощаются и прини
мают следующий вид:
При этом основные погрешности будут определяться только вели
чиной отклонения фактической перегрузки от заданной пу= 1. При
нарушении условия пу= 1 в фактические значения замеряемых
в полете величин вводятся поправки
На практике для получения балансировочных кривых оказывается
достаточным задать неустановившееся движение самолета усло
виями р = 0, пу—\ и с1пу/сН = 0. Выполнение указанных условий даже
на отдельных этапах неустановившегося движения, т. е. в отдель
ные моменты времени, обычно позволяет получать балансировоч
ные кривые Рв = / (М, У), хв= / 1(М, У), 6В = Ы М , У) непосредст
венно из полетных записей.
Техника пилотирования самолета в процессе разгона от мини
мальной скорости (У щ 1п ) ДО максимальной У ш ах и при торможе
нии его от Ут ах до Ущш значительно проще, чем выполнение уста
новившихся по скорости режимов (зубцов). Метод разгона и тор
можений, кроме того, более универсален, чем метод зубцов, так
как может быть применен для определения характеристик устой
чивости по скорости в криволинейном полете с заданной перегруз
кой пу = сопз!, а на самолетах с большой тяговооруженностью
и при условии п = ] / ^ + п2хЛ~ л^ = соп81 например, при /г =
После первичной расшифровки полетных записей дальнейшая
обработка при построении балансировочных кривых сводится к на
хождению на них таких участков, для которых удовлетворяются
условия пу= 1 и <Зпу/(Н = 0, а пг^ 0. Обрабатывая подобным обра
зом записи разгона и торможения, можно без особого труда полу
чить достаточное количество экспериментальных точек для по
строения двух балансировочных кривых, соответствующих полной
и минимальной тяге двигателя.
ь р ъ^ р ^ п у^ р у 2 - ь у - '
ЬХВ^Х "А П У + ХУ -^ А У ; .
ьУ.
(6. 8)
(6. 9)
232
Отправляясь от уравнения (6.5), можно вывести выражения и
для расчета поправок на нестационарность режима полета при
получении балансировочных кривых Рв = Цпу, Су) 9 = су) и
0в—12{пу, Су) при М = с о п 51: и з неустановившихся виражей-спира
лей. Если вираж-спираль выполняется при постоянной скорости
полета по траектории (М = сопз{), то причинами погрешности могут
быть:
1) непостоянство угла атаки и, следовательно, неравенство
(т- е - отличие угловой скорости тангажа
си
ловой скорости вращения траектории
ав
г тр
а V
д
Пу
от уг-
на ве-
с1а
личину — = аф О , поскольку 0 = 0 + гДе й —угол тангажа,
сИ
б —угол наклона траектории и а —угол атаки). Вследствие этого
меняется величина демпфирующего.момента самолета.
Если принять линейную зависимость момента от угловой ско
рости, то поправки на нестационарность режима по углу атаки
(а^=0 ) будут иметь следующий вид:
в + тг св
А Ри
Ах»
V
(при обратимой системе
управления);
1- ку (при необратимой сис
теме управления);
со „
Ь я т /л-т .
-----
-П
У'
- Ь т1г ’\- т* .
-Л « ..1- П
в V с а
йа
си
у
Су Г.п
С*
= ОПу_
сН
ар*
(6. 10)
-скорость изменения угла атаки;
-скорость изменения перегрузки по вре
мени;
■ характеристика загрузочного механизма
аХв необратимой системы бустерного управ
ления;
2) угловое ускорение (при с1юг1сН ф 0).
Поправки, обусловленные угловым ускорением, можно исклю
чить, если при обработке полетных записей отсчет фактических
величин Р в, *в и 6В производить только в моменты времени, когда
233
Ло2/Л = 0 (т. е. угловая скорость имеет постоянную величину
со2 = сопз1).
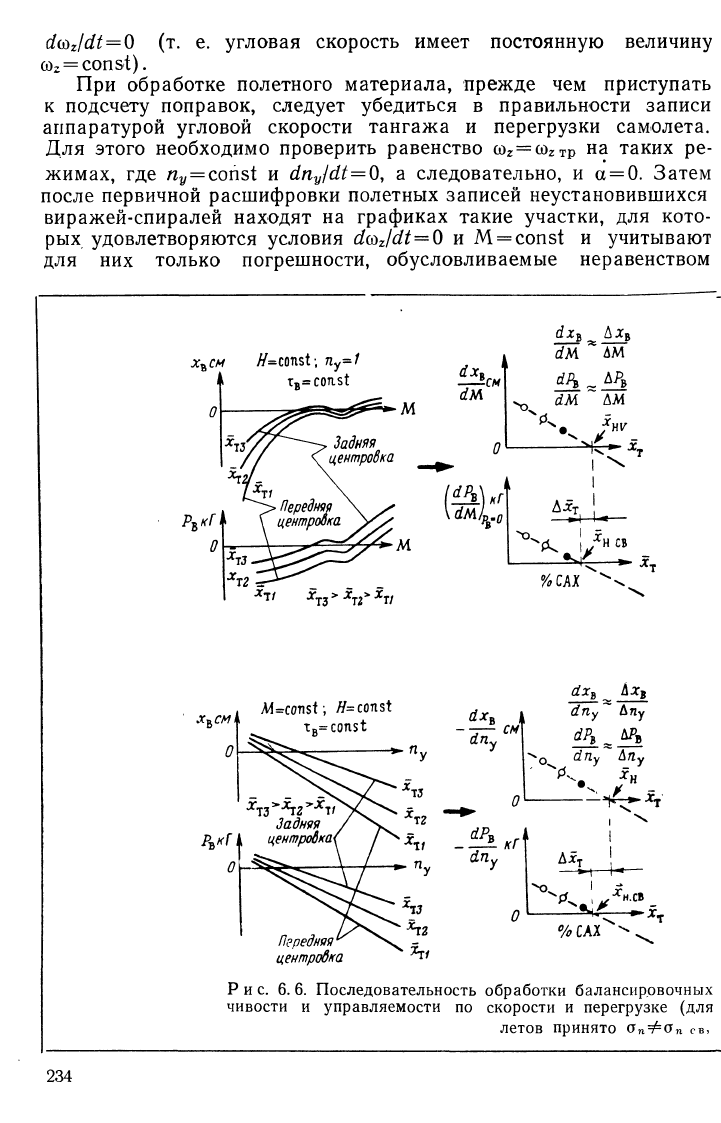
При обработке полетного материала, прежде чем приступать
к подсчету поправок, следует убедиться в правильности записи
аппаратурой угловой скорости тангажа и перегрузки самолета.
Для этого необходимо проверить равенство о г = о 2тр на таких ре
жимах, где /г2/ = сопз1 и с1пу]сН = 0, а следовательно, и а = 0. Затем
после первичной расшифровки полетных записей неустановившихся
виражей-спиралей находят на графиках такие участки, для кото
рых удовлетворяются условия йсог/сИ—О и М = сопз1 и учитывают
для них только погрешности, обусловливаемые неравенством
Рис. 6. 6. Последовательность обработки балансировочных
чивости и управляемости по скорости и перегрузке (для
летов принято опФоп св,
234
о)2=#=со2Тр. Обработав подобным образом полетные записи, можно
получить необходимое количество экспериментальных точек для
построения балансировочных кривых Ръ = !{пу, су), хв = !\(пу, су)
и бв=/2 [пу, су) при М = сопз1 и заданном режиме работы двигателя.
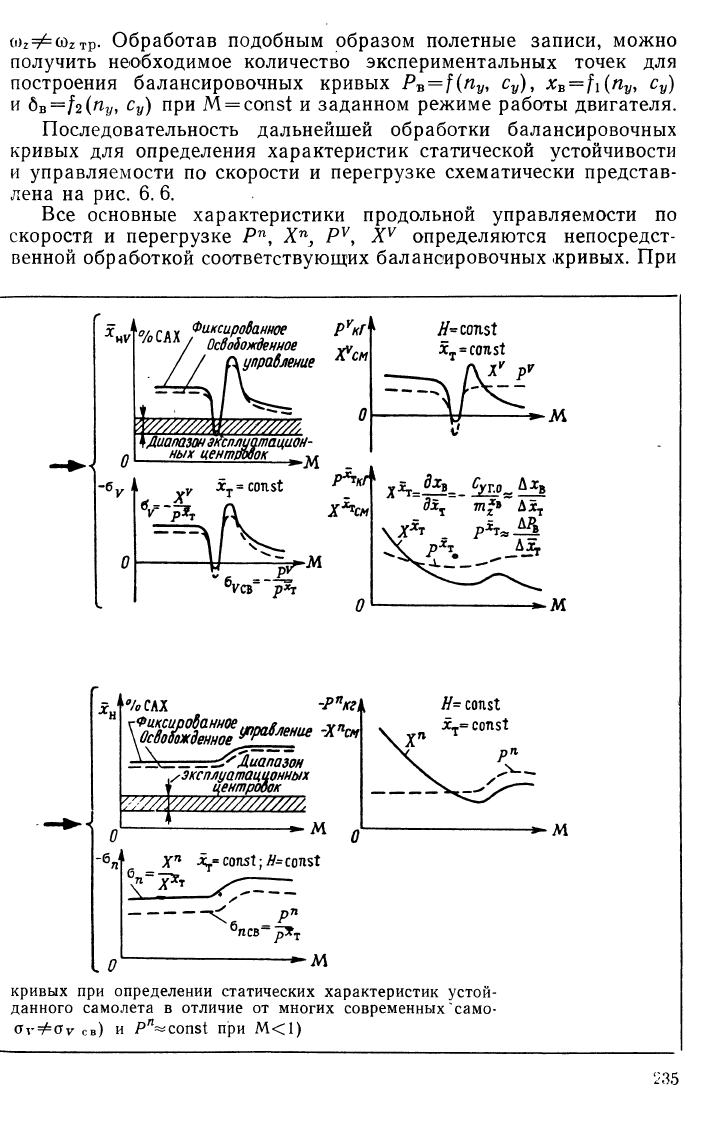
Последовательность дальнейшей обработки балансировочных
кривых для определения характеристик статической устойчивости
и управляемости по скорости и перегрузке схематически представ
лена на рис. 6. 6.
Все основные характеристики продольной управляемости по
скорости и перегрузке Р п, Хп3 Ру, Х у определяются непосредст
венной обработкой соответствующих балансировочных -кривых. При
°/ о САХ -Р пкгк
д а б г « » * * " « ** »
Л
__
Диапазон
1ЦЦ0ИИЫХ
йентрсюок
г
• м
Х п -^-С0П51;Л=С0П5Т
•м
■м
кривых при определении статических характеристик устой-
данного самолета в отличие от многих современных само-
СгФоу св) и Р л~сопз! при М <1)
скорости определяется по балансировочной кривой Рв = 1(М, V)
при условии балансировки самолета по усилиям, т. е. при Рв = 0.
Коэффициенты статической устойчивости по скорости (а^ и
ву св) и перегрузке (вп и сгпСв), а также нейтральные центровки
самолета определяются последующей обработкой балансировоч
ных кривых (см. рис. 6.6). _
Нейтральные центровки хнУ, хн усв, х'н и я н.св, при которых
самолет теряет устойчивость по скорости и перегрузке в* полете
с фиксированным и освобожденным управлением, определяются
условием обращения в нуль коэффициентов статической устойчи
вости
Л
Р у
этом показатель управляемости Ру= ^ (с(Рв/с(У)рв=о для каждой
0иаКсв=
-----
г = 0;
X
т
Р
т
Х п л Р П г,
=0 и а„ „ = - = -= = о.
(6. 11)
& р ^т }
Так как коэффициенты расхода усилий и ручки управления на
центровку РХт и Х Хт всегда являются конечными величинами, из
выражений (6.11) следует, что условием статической нейтрально
сти самолета является обращение в нуль показателей управляе
мости:
Х у --
Х" =
V
_
л
1; Р у =
= - (
'ЛРЪ'
2
сIV
2 \
> йУ.
ах в
о*
рп _
арв
— 0
апу
- и,
йпу
Следовательно, получив из полета при двух-трех центровках
соответствующие балансировочные кривые, можно построить зави
симости вида
Р у = / { х т), Х у = М х , )
для нескольких значений У=сопз1 при Рв = 0 путем соответствую
щей обработки балансировочных кривых Р В = /(М , V) и хв =
=■/1 (М, У), а также зависимости вида
Я" = / ( * т), Х п= Л & т)
для нескольких значений У=сопз1 путем соответствующей обра
ботки балансировочных кривых Рв = 1(пу, су) и хв = }\ (пу, су).
Учитывая линейный характер изменения показателей Р у, Х уу
Рп и Хп от центровки #т, можно определить нейтральные цент
ровки самолета путем графической экстраполяции до нуля указан
ных зависимостей (второй вертикальный ряд графиков на рис. 6. 6).
Подобным образом определяются нейтральные центровки самолета
235
по скорости и перегрузке при полете с освобожденным и фиксиро
ванным управлением для всего диапазона эксплуатационных ско
ростей и высот (следующий вертикальный ряд графиков на
рис. 6.6). Для определения приведенных на рис. 6.6 кривых коэф
фициентов устойчивости по скорости и перегрузке, как это следует
из выражений (6.11), кроме показателей управляемости Хп, Рп и
Ху, Ру (крайний ряд на рис. 6.6), необходимо знать коэффициенты
расхода усилий и ручки управления на центровку~ (Р*т и X х т).
Последние можно определить непосредственно по балансировоч
ным кривым Р В = /(М , V) и хв= Ы М , V), полученным при двух
трех центровках (при условии М = сопз1 или 1/=сопз1:). Кроме того,
эти коэффициенты можно определить расчетом по следующим
формулам:
р хт — 1^2-) X х? (для самолетов с необратимой системой бустер-
1 ного управления);
х О тш
Р т = — ^шв~ $ Л (Для самолетов с обратимой системой),
5 ‘ тг
где тх*— коэффициент эффективности продольного управ-
* ления;
су г.п— коэффициент подъемной силы самолета при задан
ных условиях (М = сопз1, У=сопз1) установивше
гося прямолинейного полета;
арЕ
характеристика загрузочного механизма необрати
мей мой системы управления стабилизатором (рулем
высоты), указывающая, какое усилие необходимо
приложить к рычагу управления для смещения его
на 1 см;
С /5— удельная нагрузка на крыло в кГ/м2\
~— коэффициент передачи между углом отклонения
57,3ахв руля высоты и линейным перемещением рычага
управления (кинематическая характеристика си
стемы управления самолета);
ть^= дт^_— коэффициент шарнирного момента руля высоты;
тгв — коэффициент эффективности руля высоты;
д5в
5 В и ЬЕ— соответственно площадь и средняя хорда руля вы
соты.
Коэффициент вп приближенно можно определить из выражения
4 л У г
без выполнения полетов с несколькими центровками по полетным
записям короткопериодических колебаний самолета при фиксиро
ванном и освобожденном управлении, если они позволяют опреде
лить период Т колебаний и известен момент инерции 1г самолета
относительно поперечной оси. Так как обычно короткопериодиче
ское движение быстро затухает, такие записи могут быть получены
только на больших высотах.
В этом случае величину нейтральной центровки самолета
с освобожденным и фиксированным управлением приближенно
определяют следующим образом:
^н.св~^т )
- - е \ (6-13)
хв ж х т- т г«, )
где — центровка, при которой произведена запись коротко
периодических колебании самолета.
Определение статических характеристик поперечной
и путевой устойчивости и управляемости
Исходным материалом для определения статических характе
ристик поперечной и путевой устойчивости и управляемости яв
ляются балансировочные кривые, полученные путем обработки ре
жимов установившихся скольжений с различными кренами при
постоянной скорости полета (М = сопз1) и записей движения сам о
лета при ступенчатом отклонении элеронов и руля направления.
Д ля определения характеристик поперечной устойчивости и
управляемости необходимо иметь балансировочные кривые вида
= / ( Р ™и у) и Рэ=1(Р или -у), а такж е зависимости хэ=!((йх) и
Рэ = }\((йх)> полученные при следующих условиях:
М — сопз!, Н да сопз!,
^руд == соп§1,
8щ=сопз1,
тэ = тн = соп§1*,
да сопз{.
Для определения характеристик путевой устойчивости и управ
ляемости самолета требуются балансировочные кривые вида
Хц = ?{& и л и у) и Рн = (\(Р или -у) и зависимости Хъ=}((ох, <%) и
Ри = [\(^х,
со
у),
полученные при тех же условиях, что и характери
стики поперечной устойчивости и управляемости, обработкой ре
* Здесь тэ и тн — углы отклонения аэродинамического триммера соответ
ственно на элероне и руле направления (положения триммирующих устройств
в системе поперечного и путевого управления самолета).
238