Котик М.Г., Павлов А.В., Пашковский И.М. Летные испытания самолетов
Подождите немного. Документ загружается.

бранных значений ,/?н (Яр), О и пу = 1, получаем зависимости
М = /(ГпрИв), совершенно аналогичные полученным по методу обо
ротов (рис. 3.8), в том случае, если возможно использование пос
леднего.
Метод разгонов
Метод разгонов основан на измерении в неустановившемся го
ризонтальном полете действующей на самолет в направлении его
движения продольной перегрузки (пх), либо ускорения (ЛУ/сН),
получаемого графическим дифференцированием по времени записи
самописца скорости.
Переход от перегрузок в связанных осях, регистрируемых в по
лете самописцем, к перегрузкам в скоростных осях производится
при помощи приближенной формулы
пх ~ п х1— ~ п уи (3.21)
где пх1 и пух — измеренные в полете значения проекций перегруз^
ки на продольную и вертикальную оси самолета-
а —угол атаки в град.
Метод разгонов не требует подобия режимов работы силовой
установки при изменении условий измерений. Этот метод универ
сальнее, чем метод сеток, менее трудоемок, но и менее точен из-за
относительно больших погрешностей в измерениях продольного
ускорения. Приведение к стандартным условиям выполняется при
помощи дифференциальной поправки,, учитывающей влияние на
тягу двигателя отклонения температуры от стандартной при неиз
менных значениях М и Я р, принимаемых за стандартные.
Разгоны выполняются при условии Я = с о п 51 о т скорости, соот
ветствующей максимальному качеству самолета, до максимальной
скорости при ГЯ< Г СТ. На последнем этапе при ТН> Тст разгон вы
полняется со снижением, с тем чтобы получить график зависимости
пх = 1(1Л) в более широком диапазоне скоростей (по числу М), до
статочном для приведения. На рис. 3. 11,6 показан характер изме
нения величины продольной перегрузки пх для дозвукового 1 и
сверхзвукового самолетов (2 и 3). Кривая 3 соответствует средним
высотам, а 2 — высотам вблизи потолка сверхзвукового самолета,
когда при разгоне в горизонтальном полете возможен выход его на
границу потолка (см. рис. 3. 3, кривая 2, высота, отмеченная пунк
тирной линией).
На участке разгона со снижением значения продольной пере
грузки пх отрицательны, так как дальнейшее увеличение скорости
обеспечивается не избыточной тягой двигателя, а направленной
вперед проекцией силы веса самолета. В фактических условиях
горизонтального полета значение пх = 0 на режиме разгона соот
ветствует максимальной скорости. При переходе к стандартным
4*
условиям в случае сохранения значений М и Нр изменяется тяга
двигателя на величину
д Р = РСТ- Р Н, (3.22)
соответствующую АТ = Тст— Тн, что вызывает изменение продоль
ного ускорения.
Если принять рн = Рст и М я = М ст (т. е. при пересчете продоль
ной перегрузки учитывать только изменение тяги при переходе от
фактических к стандартным условиям), то поправку к пх можно
определить по формуле
ЛР (3.23)
А ПхТ ПХС1 *Рх н~
а
Переходя к приведенным значениям тяги, получаем
Р*
Д
Ро
ст ^п ри в и \
или
Д Р-
( ^ в)д г *
Х^прив/
(3. 24)
Ро \ил прив
Подставляя выражение (3.24) в уравнение (3.23), получаем
ДЯл. = л 1л- д г . (3.25)
О Ро УдГ прив/ '
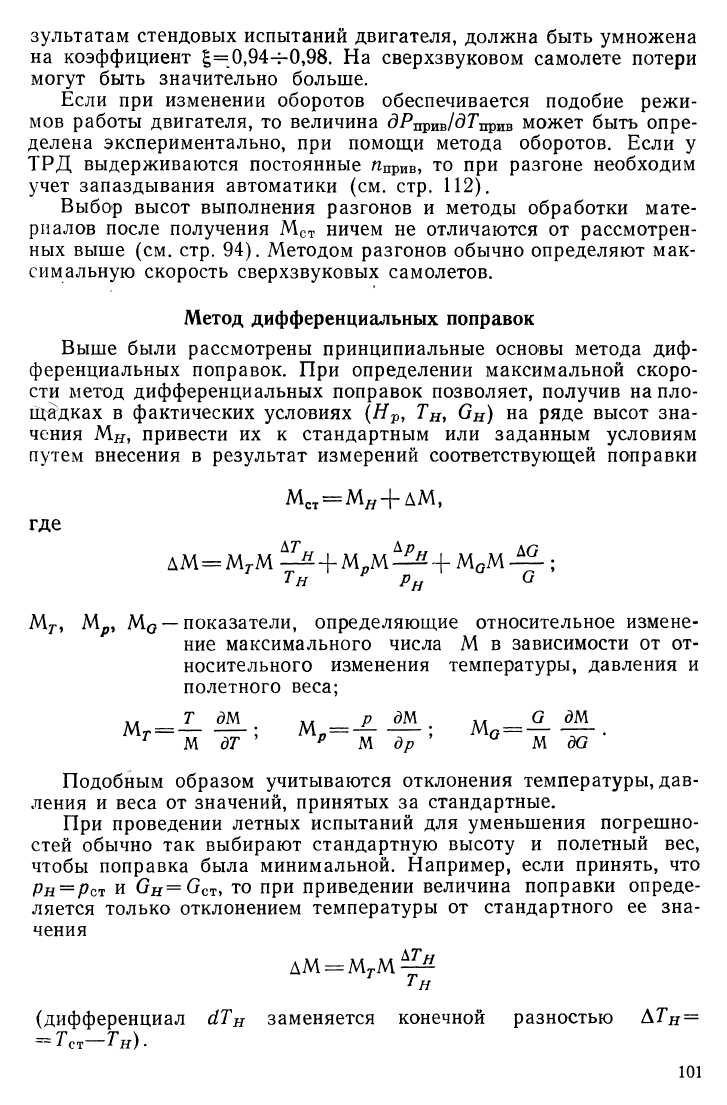
Сместив начало отсчета пх вверх или вниз на величину АпхТ
(рис. 3. 12) в зависимости от знака отклонения температуры А Г,
получим в точке пересече
ния с кривой пх=}(М)
значение максимальной
скорости в стандартных
условиях М ст . Производ
ную изменения тяги дви
гателя по температуре
(^-РпривЛ^^прив в выраже
нии (3.25), являющуюся
функцией числа М и при
веденной температуры,
берут по результатам
стендовых испытаний дви
гателей с учетом допол
нительных потерь тяги.
Обычно потери тяги, опре
деляемые особенностями аэродинамики входных и выходных кана
лов двигателя, на дозвуковом самолете составляют 2—6%. Поэто
му для учета потери тяги при переходе от стендовой к самолетной
компоновке двигателя производная дРптв/дТи1тв, полученная по ре
Р и с. 3.12. Схема получения М ст по зависи
мости пх = }( М)
100
зультатам стендовых испытаний двигателя, должна быть умножена
на коэффициент |=0,94~0,98. На сверхзвуковом самолете потери
могут быть значительно больше.
Если при изменении оборотов обеспечивается подобие режи
мов работы двигателя, то величина дРщ>ив/дТщ>ив может быть опре
делена экспериментально, при помощи метода оборотов. Если у
ТРД выдерживаются постоянные Яприв, то при разгоне необходим
учет запаздывания автоматики (см. стр. 112).
Выбор высот выполнения разгонов и методы обработки мате
риалов после получения Мст ничем не отличаются от рассмотрен
ных выше (см. стр. 94). Методом разгонов обычно определяют мак
симальную скорость сверхзвуковых самолетов.
Выше были рассмотрены принципиальные основы метода диф
ференциальных поправок. При определении максимальной скоро
сти метод дифференциальных поправок позволяет, получив на пло
щадках в фактических условиях (Яр, Тн, Сн) на ряде высот зна
чения Мя , привести их к стандартным или заданным условиям
путем внесения в результат измерений соответствующей поправки
Мг, Мр, М0 —показатели, определяющие относительное измене-
Подобным образом учитываются отклонения температуры, дав
ления и веса от значений, принятых за стандартные.
При проведении летных испытаний для уменьшения погрешно
стей обычно так выбирают стандартную высоту и полетный вес,
чтобы поправка была минимальной. Например, если принять, что
Рн = рст и Сн =Сст!> то при приведении величина поправки опреде
ляется только отклонением температуры от стандартного ее зна
чения
(дифференциал йТн заменяется конечной разностью АТН =
Метод дифференциальных поправок
Мст = Мя + дМ,
где
АТ„
д М = М гМ —2 + М „ М -^
т н Р н
ние максимального числа М в зависимости от от
носительного изменения температуры, давления и
полетного веса;
Т
СТ
Т н ) .
101
Если Тн = ТСт и 0 н = 0 Ст, то поправка равна
дМ = МвМ - ^ ,
Рн
где кРн— Рст — Рн (Рст соответствует Тн по таблице стандарт
ной атмосферы).
Применение метода дифференциальных поправок требует зна
ния показателей, которые могут быть получены как эксперимен
тальным путем, так и расчетом. Однако расчет не всегда обеспечи
вает необходимую точность. Поэтому метод дифференциальных по
правок применяется главным образом при испытаниях серийных
самолетов, для которых сетки изменения показателей по числу М
и высоте определяются в процессе проведения испытаний опытных
и первых серийных машин.
Метод дифференциальных поправок принципиально позволяет
выполнять приведение максимальной скорости самолетов к задан
ным условиям при любом типе двигателей. Необходимым условием
является знание производных дР/дТ и дР/дНр в нужном диапазоне
изменения температуры, высоты и числа М.
3.6. ПОДОБИЕ РЕЖИМОВ РАБОТЫ
ТУРБОВИНТОВОГО ДВИГАТЕЛЯ И ОПРЕДЕЛЕНИЕ
МАКСИМАЛЬНОЙ СКОРОСТИ ПОЛЕТА САМОЛЕТОВ
С ТВД
Определение максимальной скорости и других летных характе
ристик на самолетах с ТВД и ТРД в части подготовки к испытаниям,
выбора высот, выполнения испытательных режимов и первичной
обработки записей имеет много общего. При испытаниях самолетов
с ТВД для пересчета характеристик к стандартным или заданным
условиям (по температуре, высоте, полетному весу, оборотам
двигателей) возможно использование с некоторыми изменениями
методов, используемых для самолетов с ТРД.
Отличия определяются особенностями турбовинтового двига
теля, создающего тягу на этом самолете с помощью воздушного
винта. Эффективность ТВД по созданию тяги оценивается мощ
ностью, которая в общем случае является функцией расхода топ
лива скорости полета V, оборотов двигателя п, атмосферного
давления рн, температуры воздуха ТНу чисел Ке турбины, ком
прессора и выхлопного сопла Кет.к.с:
N = /{(}, V , р„, Тн , л, Кет к с). (3.26)
Для удобства пересчетов при рассмотрении режимов работы
ТВД и приведении летных характеристик самолета с ТВД к задан
ным или стандартным условиям, так же как и для ТРД вводятся
понятия приведенных оборотов пПрив, приведенного расхода топ
102
лива С?Прив, приведенной эквивалентной мощности Л^Прив и приве
денной мощности, создаваемой тягой реактивного сопла Л^рприв,
а скорость полета заменяется числом М.
ния б, близкое к постоянному в диапазоне высот используемых
самолетами с ТВД, в выражении для (?прив обычно опускается),
Значение эквивалентной приведенной мощности складывается
из потребляемой винтом Л^ВПрив и создаваемой тягой реактивного
сопла Мрприв*
Значения чисел Кет.к.с турбины, компрессора и сопла одно
значно связаны с числом Ке полета, которым они обычно и заме
няются.
В соответствии с (3,26) и рассмотренными выражениями вели
чина эквивалентной приведенной мощности в общем случае яв
ляется функцией следующих величин:
В силу несовершенства винта как движителя не вся эквива
лентная мощность преобразуется в полезную
Коэффициент полезного действия винта г\в является функцией
коэффициента скорости (относительной поступи) Ху коэффициента
мощности р и концевого числа М лопасти винта Мг:
Здесь:
(так же как и для ТРД значение коэффициента полноты сгора-
N.
е прив прив»
М,
пприв,
Ке).
(3.27)
N = ц N
1 прив !в .
(3.28)
ЧВ= / ( Х , Р, М г).
103
В соответствии с теорией воздушного винта* значения этих
величин определяются выражениями
^
__
V
_
60 а0М
71СП) I ^прив^
0
_
757УВ ____„ / 60 \з Т0 * в прив ^
\1 ) Т0 п1?т ;
где пс — обороты винта в-секунду;
/ лс60\
/ — передаточное отношение редуктора винта -V- );
и — окружная скорость конца лопасти винта;
-О —диаметр винта.
Подставив значения переменных в выражение для т^в, имеем
ЧВ= / ( М , л прив) Л^вприв)
или, учитывая (3.27),
/ ( С п р и в , ^ п р и в » К б ) .
Возвращаясь к (3.28), получаем выражение, определяющее
полезную мощность с учетом коэффициента полезного действия
винта через удобные для измерения в полете переменные:
- ^ п р и в прив ^ ( Ф п р и в ’ ^ п р и в ’ К б ) .
Для современных ТВД, обороты которых лежат в области мак
симума к. п. д., изменение оборотов и числа Кб в возможных пре
делах при приведении обычно практически не сказывается на по
лезной мощности. Вследствие этого при приведении можно считать,
что приведенная полезная мощность является функцией только
числа М и приведенного расхода топлива
^ Прив~<Р(У„р„е, М). (3.29)
Изменение приведенной мощности ТВД, в интересующих пре
делах при приведении летных характеристик к заданным усло
виям, практически линейно связано с изменением расхода топлива,
т, е. производная дЛ^Прив/д<2прив практически постоянна для задан
ного значения числа М полета. Эта особенность ТВД позволяет
в широких пределах применять метод дифференциальных попра
вок для учета влияния изменения мощности на летные характе
ристики.
* См., например, И. В. Остославский, И. В. Стражева. Динамика
полета. Оборонгиз, 1963 г., стр. 127.
104
Максимальный расход топлива ТВД обычно определяется
мощностью, допустимой по прочности редуктора на малых высо
тах и температурой газов перед турбиной на больших высотах.
Второе условие может ограничивать расход топлива и на малых
высотах при высоких температурах воздуха Тн. Расход топлива
ТВД на высотах ограничения мощности по температуре газов пе
ред турбиной (рис. 3. 13), при обычно применяемом регулировании
по внешним параметрам (V, р, Г), удобно определять выражением
типа
<2=]\р\кс, (3.30)
где Д — постоянный коэффициент, определяемый особенно
стями типа двигателя;
р\— полное давление на входе в двигатель;
А = / (Г * ) — величина, определяемая температурой воздуха на
входе в двигатель;
С— коэффициент, величина которого определяется углом
поворота рычага настройки топливного автомата авг
контролируемым в полете по положению стрелки
указателя УПРТ (ав по УПРТ).
На высотах ограничения мощности по прочности двигателя рас
ход топлива определяется выражением типа
< М Д '+ В /> о + В '/> :-Д (2 )С . (3.31)
Здесь Д', В, В'— постоянные для данного типа двигателя вели
чины;
р 1— полное давление воздуха на входе в двига
тель;
• АС}=А'(Т* — Г4) — «срезка» топлива — уменьшение расхода топ
лива, определяемое допустимой температурой
газов перед и за турбиной (Г4).
В результате сочетания разных законов регулирования высота
ограничения мощности меняется (рис. 3.13), увеличиваясь при
температуре ниже стандартной и уменьшаясь при температуре
выше стандартной. Срезка топлива Ар существенно уменьшает
мощность ТВД при высоких температурах воздуха у земли
(рис. 3. 14). Например, для ТВД, имеющего мощность 2700 л. с
в стандартных атмосферных условиях срезка топлива уменьшает
мощность на 35—50 л. с. на каждый градус повышения темпера
туры сверх допустимой для работы без срезки. Таким образом,
расход топлива <2 и мощность ТВД меняются в соответствии с при
веденными закономерностями при изменении полного давления /?*,
температуры Т\н на входе в двигатель и положения рычага на
дстройки топливного автомата ав.
105
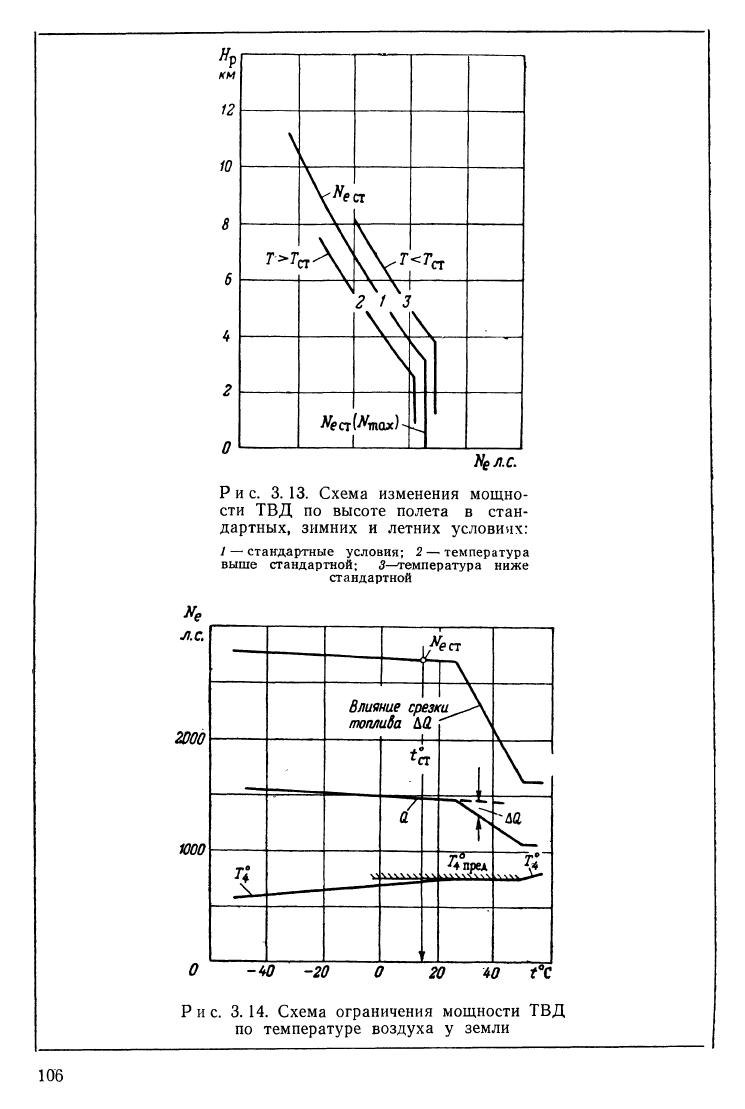
Рис. 3. 13. Схема изменения мощно
сти ТВД по высоте полета в стан
дартных, зимних и летних условиях:
1 —■ стандартные условия; 2 — температура
выше стандартной; 5—температура ниже
стандартной
Рис. 3.14. Схема ограничения мощности ТВД
по температуре воздуха у земли
Определение максимальной скорости
самолета с ТВД
Для определения условий подобия режимов полета самолета
с ТВД воспользуемся уравнениями движения в приведенном виде
(3.12), выведенными при рассмотрении подобия режимов полета
самолета с ТРД
ГЛ X р Ц I I) | /Л ^У ПРЙВ
^ п р и в ^ у РъСхЬ М + < 3 п р и в м '>
Так как эффективность турбовинтового двигателя оценивается
не тйгой, а мощностью, то в первом уравнении перейдем от приве
денной потребной тяги РПрйв к приведенной полезной потребной
мощности Л^прив. Для этого необходимо все члены уравнения умно
жить на скорость полета в стандартных условиях у земли (при
0 ^ 7 6 0 мм рт. ст. и температуре +15°С), выраженную через число
М(1/=Ма0), так как Л^Прив = ^прив1/ = -РпривМа0. После подстановки
в первое уравнение и сокращения, с учетом что М У х§/?Го = Ма0,
получаем уравнения движения в виде
^^прив су ^ ^ п р и в ^ ^ Прив’
(3. 32)
Здесь Л^прив — суммарная приведенная полезная мощность двига
телей, потребная для выдерживания установившегося режима по
лета при заданных значениях М, О прив и Уу прив*
В пределах изменений параметров движения при приведении
сх обычно практически не зависит от числа Ке, т. е. сх можно счи
тать функцией только су и М:
сх= / ( с у,
М). (3 .3 3 )
Рассматривая уравнения (3.32), имеем
-^прив / ( М , О прив, V у ПрИВ), | ^2 2^^
Су ( М , ^ Прив> ^ У прив)* 1
Потребная для полета мощность обеспечивается двигателями,
что позволяет в соответствии с (3.29) записать
ЛГ„р„в = ЛГприв.дв = /(Рп ри в, М). (3 .3 5 )
В четыре уравнения (3.33), (3.34) и (3.35) входят семь пере
менных величин ./VI, С?прив» Ууприв» ^прив> -Л/^прив» сх, суу что позволяет,
107
приняв за -параметры три из них, определить остальные. Наиболее
удобно при испытаниях принять за параметры (критерии подо
бия)— Ощшв, Уу прив и С?прив. В этом случае, при принятых выше
предположениях о пренебрежении влиянием пирив и Ке на мощ
ность двигателей и сопротивление, для режимов полета на постоян
ной скорости, включая и режимы набора высоты *, число М опре
деляется выражением
Для режимов горизонтального полета ( 1 / 2 /П р и в = 0) число М
определяется как функция только
Выведенная зависимость -позволяет определить максимальную
скорость методом сеток, т. е. построением сеток (рис. 3.15), по
требных для горизонтального полета расходов топлива
и располагаемых расходов топлива по характеристикам двигате
лей в стандартных условиях при заданном для определения макси
мальной скорости режиме их работы
Значение Мст определяется (рис. 3. 15) в точках пересечения
кривых <2прив.потр и <?прив.расп для соответствующего приведенного
веса Оприв, либо кривых <3Прив.потр и <?пРив.Расп для фактического
полета веса 6 Н на высоте Н р, принятой за стандартную.
Потребные для горизонтального полета расходы топлива опре
деляются путем выполнения на заданной высоте 5—6 площадок —
режимов установившегося горизонтального полета при выбранных
значениях скорости полета (М), либо положениях рычага топлив
ного автомата, задаваемых по указателю летчика (ав по УПРТ).
На каждой площадке замеряется скорость, высота, температура
воздуха, фактический расход топлива С}н, контролируются пара
метры работы двигателя и остаток топлива — для определения
* Возможность исключения пприв из параметров подобия для набора вы
соты вблизи земли (в частности при выпущенной механизации) или в случае
значительной разницы условий полета при приведении должна определяться
после рассмотрения особенностей законов регулирования двигателей испытывае
мого самолета.
М = /( О прив, (}прт).
(3. 36)
(3. 37)
(3.38)
108