Константинов И.А., Лалин В.В., Лалина И.И. Строительная механика. Часть2. Расчет статически неопределимых стержневых систем с использованием программы SCAD
Подождите немного. Документ загружается.


Федеральное агентство по образованию
САНКТ-ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ
И.А. Константинов В.В. Лалин И.И. Лалина
СТРОИТЕЛЬНАЯ
МЕХАНИКА
Расчет стержневых систем
с использованием программы SCAD
Учебно-методический комплекс
Часть 2
Санкт-Петербург
Издательство Политехнического университета
2009

Федеральное агентство по образованию
САНКТ-ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ
И.А. Константинов В.В. Лалин И.И. Лалина
СТРОИТЕЛЬНАЯ
МЕХАНИКА
Расчет стержневых систем
с использованием программы SCAD
Учебно-методический комплекс
Часть 2
Санкт-Петербург
Издательство Политехнического университета
2009
УДК 624.04 (075.8)
К о н с т а н т и н о в И. А., Л а л и н В. В. Л а л и н а И. И.
Строительная механика. Расчет стержневых систем с использованием
программы SCAD.: Учебно-методический комплекс. Часть 2. СПб: Изд-во
Политехн. ун-та
, 2009. 228 с.
Учебно-методический комплекс (УМК) соответствует государственному
образовательному стандарту дисциплины «Строительная механика» инженерной
подготовки по направлению «Строительство».
В него входят учебно-методические материалы по дисциплине «Строительная
механика», необходимые для изучения методов расчета на персональных
компьютерах стержневых систем с использованием программы SCAD.
Из методических соображений УМК разделен на две части: 1.«Расчет
статически определимых
стержневых систем с использованием программы SCAD»;
2. «Расчет статически неопределимых стержневых систем с использованием
программы SCAD».
УМК предназначен для студентов дневного, вечернего и заочного обучения
направления «Строительство», изучающих дисциплину «Строительная механика».
Здесь представлены материалы второй части УМК.
Табл. 20 . Ил. 114 . Библиогр.: 25 назв.
Печатается по решению редакционно-издательского совета Санкт-
Петербургского государственного политехнического университета.
© Санкт-Петербургский государственный
политехнический университет, 2009

3
ПРЕДИСЛОВИЕ
В настоящее время при проектировании строительных конструкций в
проектных организациях значительная часть расчетов выполняется на персональных
компьютерах (ПК) с помощью специальных программно-вычислительных
комплексов (ПВК), в которых отражаются и используются самые современные
достижения по расчету и проектированию сооружений.
Применяемые ПВК отличаются друг от друга методическими и сервисными
разработками
, но все они включают в себя статические и динамические расчеты
конструкций и отдельных их частей, выполняемые методами строительной механики.
Алгоритмы соответствующих численных расчетов в основном строятся на
методе конечных элементов (МКЭ), реализуемом в форме метода перемещений.
Кафедра строительной механики и теории упругости (СМ и ТУ) успешно
использует в учебном процессе
по дисциплинам «Строительная механика
стержневых систем (статика)»; «Теория упругости»; «Динамика сооружений»
программу SCAD [19].
В результате длительной работы авторов данного учебного пособия по
использованию программы SCAD в учебном процессе по указанным дисциплинам
механического цикла созданы учебно-методические комплексы (УМК).
УМК по строительной механике [24] объединяет пособия [1 – 6] авторов.
Электронные аналоги этого УМК и пособий [1 – 6] имеются
на сайте
http://smitu.cef.spbstu.ru
кафедры СМ и ТУ а также в сети классов ПК кафедр
«Строительная механика и теория упругости» и отделения «Энергетические и
промышленно-гражданские сооружения» кафедры «Гражданское строительство и
прикладная экология».
Из методических соображений УМК по строительной механике разделен на две
части. Часть 1, посвященная методике расчета статически определимых стержневых
систем, уже издана
[25]. Данная, вторая часть УМК, посвящена методике расчета на
ПК статически неопределимых стержневых систем с использованием программы
SCAD. Она состоит из четырех основных разделов.
В первом разделе даются сведения о расчете статически неопределимых балок
и рам методом сил. Раздел 2 посвящен алгоритму метода конечных элементов
стержневых систем при его реализации в форме метода
перемещений. В третьем
разделе рассматриваются примеры использования программы SCAD для расчета рам
и неразрезных балок на жестких и упругих дискретных опорных связях. В четвертом
разделе рассматриваются примеры расчета балок и рам, опирающихся на
непрерывное упругое основание модели Винклера.
Поскольку представленный комплекс является учебным, в нем
(в приложении 1) приводится сборник заданий по
учебным расчетным работам.
4
В приложении 2 даны примеры оформления отчетов по выполняемым студентами
расчетным работам, а в приложении 3 приведены вопросы для самоконтроля
учащихся по приобретенным знаниям и умениям.
Для связи полного УМК [24], его первой части [25] и данной второй части их
библиографические списки с номерами источников [1 – 20] совпадают.
Авторы УМК обращают внимание читателей на следующее.
Во-первых, авторы стремились к тому, чтобы студенты специальности ПГС,
закончив изучение строительной механики в рамках учебного плана, получили
возможность уверенно решать задачи строительной механики для линейно-
деформируемых стержневых систем с использованием персональных компьютеров и
современных вычислительных комплексов (на примере ПВК SCAD).
Во-вторых, авторы на простых примерах старались научить студентов
понимать
работу стержневых систем (как говорят иногда: понимать «игру сил» в
различных стержневых строительных конструкциях). Для этой цели были
использовали примеры расчетов различных стержневых систем, как с применением
ПК, так и вручную (без применения ПК). При этом для наглядности использовались и
элементы графостатики, например, построение многоугольника сил при
рассмотрении равновесия какой-
либо части стержневой системы. Эта же цель
имелась в виду при представлении в данной второй части, как и в полном издании
УМК [24], оригинального графического метода С. С. Голушкевича и его доказанных
им теорем «О стержне» и «Об узле».
Авторы выражают благодарность зав. кафедрой ГС и ПЭ член-корреспонденту
РАН М.П
. Федорову, руководителю отделения «Энергетические и промышленно-
гражданские сооружения» кафедры «Гражданское строительство и прикладная
экология» д.т.н, профессору А.Н. Тананаеву и заместителю заведующего
кафедрой ГС и ПЭ к.т.н., доценту А.Н. Чусову за обсуждение представленного для
опубликования учебно-методического комплекса и помощь в его издании.

5
1. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ
СТЕРЖНЕВЫХ СИСТЕМ МЕТОДОМ СИЛ
1.1. «Метод сил» и «Метод перемещений» –
– два основных метода расчета стержневых систем
В разделах 1.7 – 1.8 первой части УМК по расчету стержневых систем
[25] было дано предварительное представление о статически определимых и
статически неопределимых стержневых системах и двух основных методах
их расчета: методе сил и
методе перемещений.
С методической точки зрения для упрощения изучения этих вопросов
рассматривались только плоские стержневые системы. Продолжим эту
методику и во второй части УМК.
Известно, что для решения основной задачи строительной механики
плоских стержневых систем (определения их напряженно – деформированного
состояния (НДС)) необходимо уметь определять в любом сечении любого
стержня стержневой
системы девять величин: три усилия (M, Q, N), три
соответствующих эти усилиям деформации (
κ
γ
ε
,,) и три составляющих
перемещения сечения (u, w,
θ ).
В разделах (1.7 – 1.8) первой части [25] было показано, что для
определения этих девяти неизвестных величин в плоских стержневых системах
имеется девять уравнений (три группы уравнений по три уравнения в каждой
группе (см. (1.3 – 1.5) в [25]) и соответствующие граничные условия).
В первой части УМК [25] были даны и первые представления о решении
этой системы уравнений методом
сил и методом перемещений.
В методе сил алгоритм решения строится так, что сначала определяются
усилия M, Q, N. Затем, по ним могут быть определены перемещения
сечений (в [25] показан способ определения перемещений по усилиям
с помощью формулы Максвелла – Мора, который наиболее часто применяется
в инженерной практике, если уже имеются эпюры усилий на стержнях).
В
методе перемещений алгоритм решения строится так, что сначала
определяются перемещения некоторых узловых сечений стержней, например,
узлов конечных элементов в МКЭ. Затем по узловым перемещениям
определяются усилия по концам стержней, примыкающих к намеченным узлам.
В первой части УМК, посвященной расчету статически определимых
стержневых систем, были продемонстрированы оба метода.
6
Само наименование класса стержневых систем «Статически определимые
стержневые системы» показывает, что при использовании для их расчета
метода сил любые усилия в любых сечениях ее стержней могут быть
определены только из уравнений равновесия (статики). Поэтому построение
эпюр усилий в статически определимых стержневых системах, вообще говоря,
может быть выполнено и вручную, т. е
. без использования ПК.
Однако, для повышения производительности труда, обычно и при расчете
статически определимых стержневых систем используют второй метод – метод
перемещений, который выполняется на ПК с использованием современных
программ, реализующих алгоритм МКЭ в форме метода перемещений. Кафедра
СМ и ТУ СПбГПУ использует для этой цели программу SCAD одноименного
ПВК [19], которая оказалась
очень удобной для учебного процесса по
строительной механике. Метод сил, как было показано в первой части УМК, в
этом случае используется для контроля усилий, полученных расчетом на ПК .
Данная, вторая часть УМК, посвящена применению метода сил и метода
перемещений к расчета статически неопределимых стержневых систем. С
методической точки зрения и здесь
целесообразно начать рассмотрение этих
методов с метода сил.
1.2. Расчет методом сил статически неопределимых стержневых систем
на примере рамы
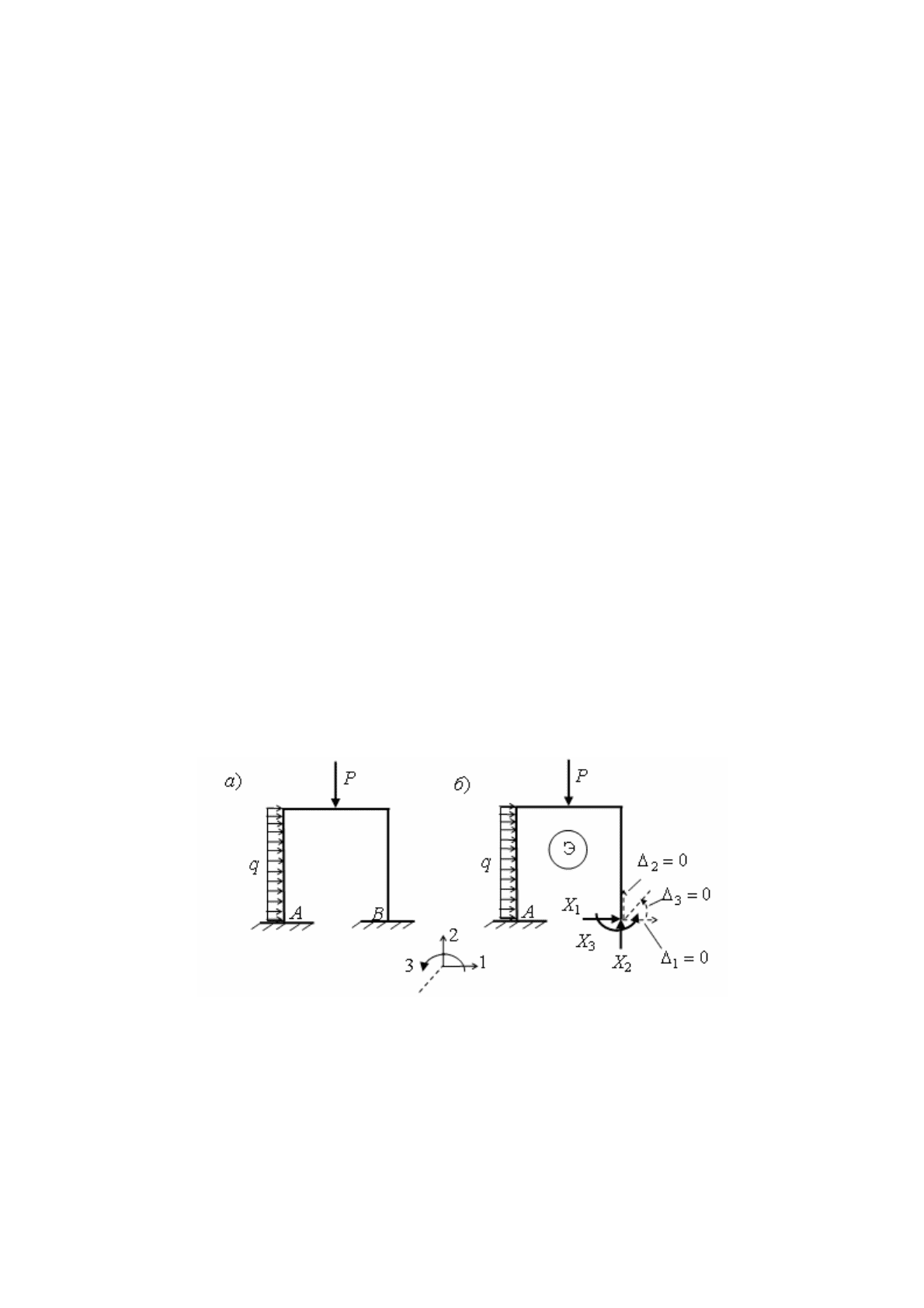
Рассмотрим раму, изображенную на рис. 1.1, а. Требуется построить для
этой рамы эпюры внутренних усилий
N
.Q,
M
.
Рис. 1.1
Как всегда расчет начинаем с выяснения принадлежности рамы к
статически определимым или к статически неопределимым системам.
Сначала подсчитываем степень статической неопределимости
(см. раздел 2 части 1 [25]):
)(3-)3(
ш1коп
nnnn
+
+=
= 3)0(3-0)3(6
=
+
⋅
+
.
(1.1)

7
Результат показывает, что рама три раза статически неопределима, т.е.
она с точки зрения определения в ней усилий с помощью имеющегося числа
уравнений равновесия имеет три «лишние» неизвестные.
Результат (1.1) показывает также, что рама имеет три «лишних» связи с
точки зрения числа связей, делающих эту систему геометрически неизменяемой
системой, т.е. единым
неподвижным диском (см. раздел 2 части 1 УМК [25]).
Действительно, структурный анализ рамы показывает, что она
представляет собой единый диск. Для закрепления диска на основании
достаточно иметь три связи, не пересекающиеся в одной точке и не
параллельные (см. подраздел 2.2 части 1 УМК [25]). Следовательно, три
опорные связи из имеющихся шести могут с этой точки зрения
рассматриваться
как «лишние». Как будет показано в следующем пункте, за «лишние» могут
приниматься не только опорные связи, но и внутренние связи в сечениях
стержней.
Основная идея расчета методом сил статически неопределимой системы
состоит в составлении дополнительных к уравнениям равновесия уравнений
для определения «лишних» неизвестных.
Рассмотрим эту идею и последовательность ее
реализации на примере
рамы, расчетная схема которой изображена на рис. 1.1, а.
1. Из заданной статически неопределимой стержневой системы
удаляются «лишние» связи и получается статически определимая
стержневая система, называемая «основной системой» метода сил.
Эта
система должна быть статически определимой, поэтому для нее должны
соблюдаться два условия: 1) 0
=
n ; 2) она должна быть геометрически
неизменяемой.
«Основной» такая система называется потому, что все остальные
операции по расчету заданной стержневой системы методом сил выполняются
с помощью этой системы.
Действие удаленных «лишних» связей на основную систему заменяется
действием «лишних» неизвестных усилий, которые и подлежат определению в
методе сил при расчете статически неопределимых
стержневых систем.
Примечание. При выборе основной системы в заданной раме, т.е. при удалении трех
лишних связей, следует обратить внимание на то, что имеется бесконечно большое
число вариантов. Это объясняется тем, что кроме шести внешних опорных связей, которым
соответствуют опорные реакции, каждое сечение рамы (из их бесконечно большого
числа в раме) содержит три внутренних связи, которым соответствуют три внутренних
усилия: M, Q, N,
8
Поэтому за три лишние связи в раме могут быть выбраны не только три из шести
опорных связей, но любые три внутренних связи в сечениях стержней рамы, лишь бы
полученная основная система была статически определимой, а значит и геометрически
неизменяемой.
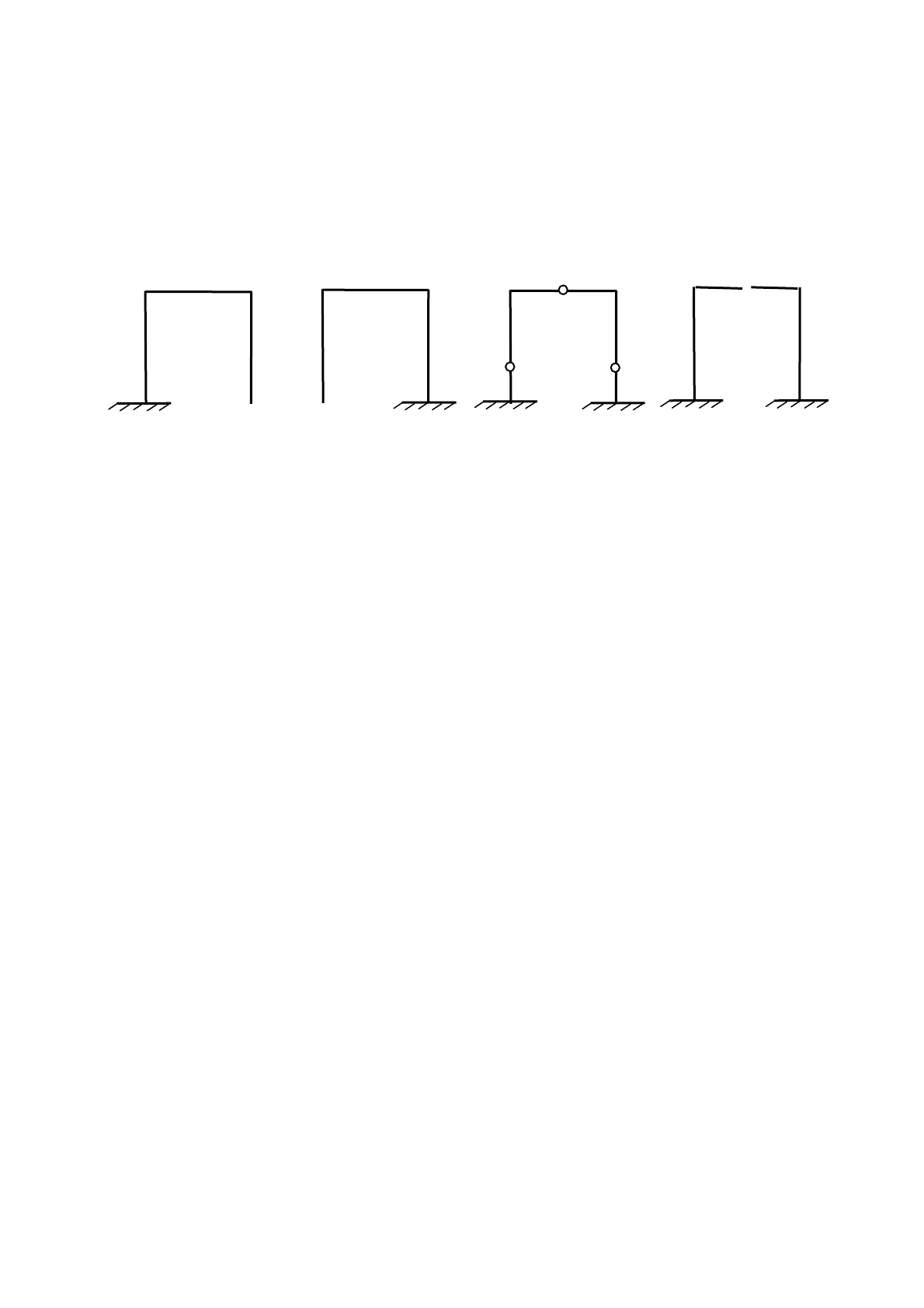
На рис. 1.2 для рассматриваемой рамы приведены четыре из бесконечно большого
числа вариантов статически определимых основных систем.
Рис. 1.2
Для расчета выбирается та основная система, которая приводит к наиболее
рациональному расчету. Вопрос о рациональности будет рассмотрен на примере расчета
неразрезных балок в подразделе 1.2.
В данном примере расчета рамы этот вопрос не рассматривается. Для расчета
методом сил выбран первый вариант основной системы (см. рис. 1.2) в виде рамы, которая
была использована в разделе 12 части 1 [25] при рассмотрении вопроса по определению
перемещений.
2. Составляется так называемое «эквивалентное состояние» (Э)
выбранного (в данном примере первого, см. рис. 1,2) варианта основной
системы (рис.
1.1, б), Для того, чтобы основная система по возникающим в ней
перемещениям, усилиям и деформациям была эквивалентна заданной
статически неопределимой раме, необходимо поставить следующие три
условия:
1) основная система должна испытывать те же внешние воздействия
(в рассматриваемом примере рамы на основную систему должна действовать
заданная на раму нагрузка);
2) вместо удаленных связей
к ней должны быть приложены лишние
неизвестные, являющиеся усилиями в удаленных связях;
3) в направлении удаленных связей должны быть поставлены условия
равенства нулю перемещений по направлениям удаленных связей
(см. рис. 1.1, б).
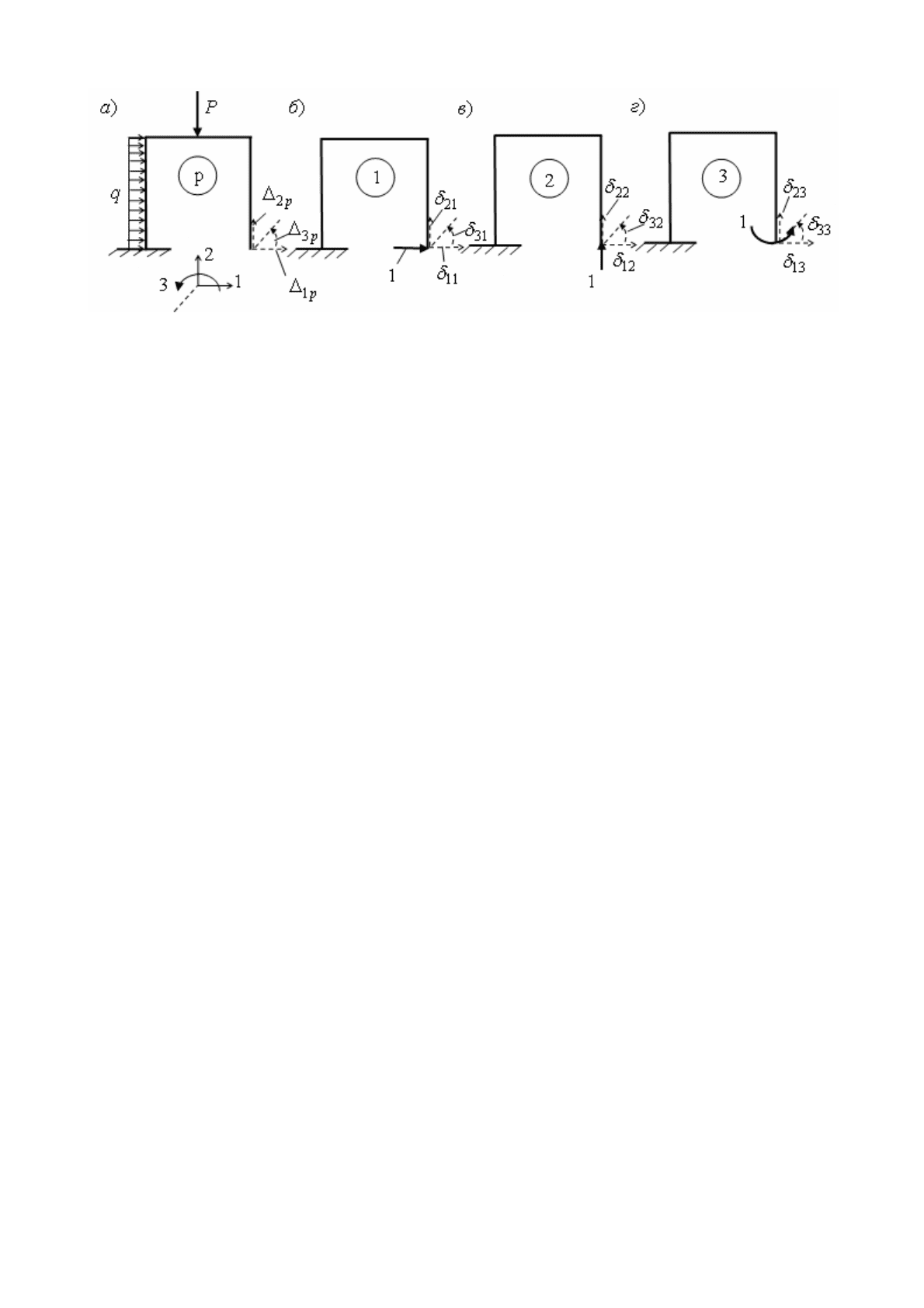
3. Составляются грузовое состояние основной системы и n
вспомогательных состояний основной системы, в каждом из которых
действует единичная сила, соответствующая лишнему неизвестному
(рис. 1.3).
2)
3)
4)
1)
9
Рис. 1.3
В этих вспомогательных состояниях обозначены перемещения по
направлению удаленных лишних связей. Как было показано в разделе 12
первой части пособия [25], эти перемещения могут быть определены с
помощью соответствующих формул Максвелла-Мора.
4. Из условий равенства нулю перемещений в эквивалентном
состоянии основной системы по направлению удаленных связей
составляется система уравнений метода сил для определения лишних
неизвестных усилий.
С этой целью, используя закон Гука и принцип независимости действия
сил для линейно деформируемой рамы, запишем условия
0=Δ
i
, 321 ,,
=
i
(см. рис. 1.1, б) в виде:
.XXX
;XXX
;XXХ
p
p
p
0
0
0
3333232131
2323222121
1313212111
=Δ+++
=Δ+++
=
Δ
+
+
+
δδδ
δδδ
δ
δ
δ
(1.2)
Получили систему трех алгебраических уравнений для определения трех
лишних неизвестных в выбранной основной системе.
Такой же вид система уравнений будет иметь и для других вариантов
основных систем для заданной статически неопределимой рамы. При этом сами
лишние неизвестные и коэффициенты, отражающие перемещения по
направлению лишних неизвестных, будут соответствовать выбранной основной
системе
.
С учетом введенных в разделе 12 части 1 [25] для основной системы
матрицы податливости
D и вектора перемещений
p
d
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
δδδ
δδδ
δ
δ
δ
=
333231
232221
131211
D ;
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
p
p
p
p
3
2
1
Δ
Δ
Δ
d