Конспект лекций Системы управления электроприводами
Подождите немного. Документ загружается.

решение, но обеспечивают приемлемое качество управления лишь в ограниченном диапазоне
изменения параметров объекта.
В СНС второй группы эффект самонастройки достигается с помощью изменения
параметров управляющего устройства. Эти системы более универсальны, чем СНС с
сигнальной настройкой, но сложнее в исполнении.
Эталонные модели в той или иной форме используются в большинстве беспоисковых
адаптивных СУ ЭП. В качестве таких моделей мог
ут быть применены:
Модели замкнутой или разомкнутой системы;
Модели части системы, в которой находятся нестационарные параметры;
Могут быть заданны определённые величины, являющиеся эталоном для конкретных
условий работы нестационарной системы.
В некоторых случаях модель может быть задана не в явной форме, но её присутствие
предопределяет работ
у беспоисковой адаптивной системы.
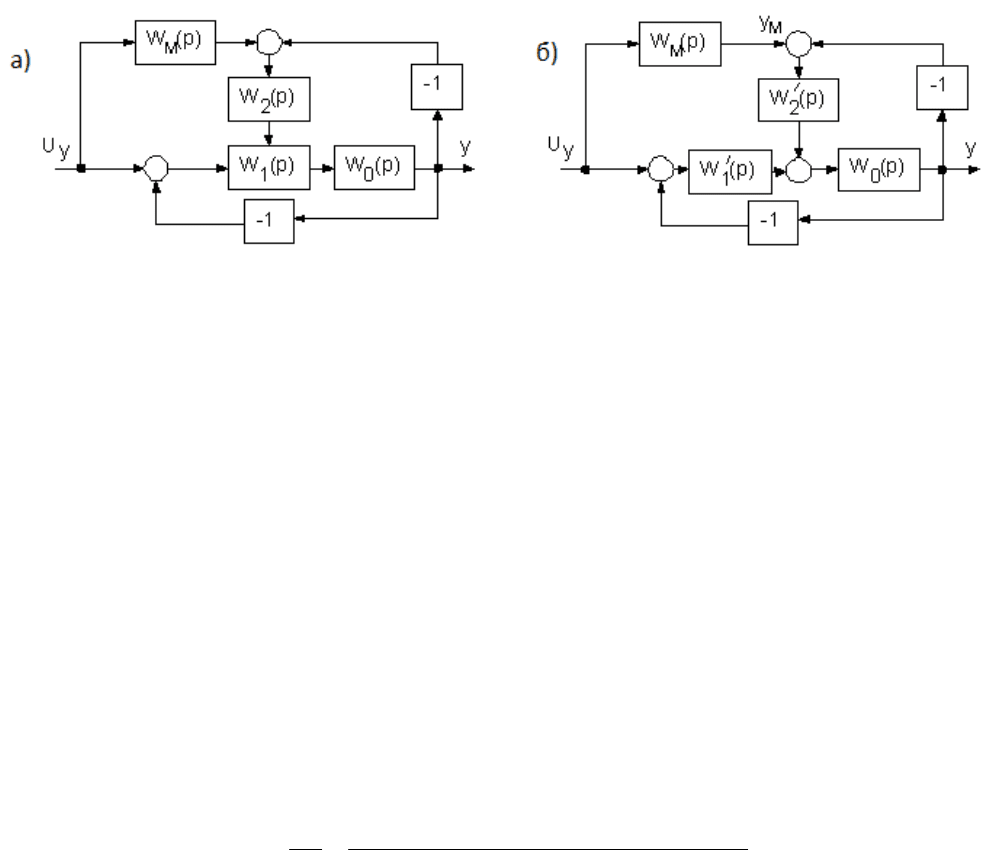
Рисунок 8.18 – Беспоисковая система с эталонными моделями
Разновидности беспоисковых систем, в которых эталонные модели присутствуют в
явном виде, получили название систем с эталонными моделями. Простейшие структурные
схемы таких систем показаны на рисунке. Сигнал
у
м
на входе эталонной модели, имеющей
передаточную функцию
()
pW
M
, сравнивается с сигналом у на выходе системы. По разности
этих сигналов выбирается корректирующее воздействие на систему. В первом случае
(рисунок 8.18,а) вслед за измерением параметров объекта
(
)
pW
0
изменяются параметры
корректирующего звена W1(p) . Во втором случае (рисунок 8.18,б) формируется добавочный
сигнал , параметры звена )(
1
pW остаются неизменными. Синтез звеньев )(2),(2
1
pWpW
производится в соответствии с требуемым качеством работы самонастраивающейся системы.
В процессе функционирования системы параметры эталонной модели не изменяются и
соответствуют значениям, при которых ПП в модели близки к желаемым ПП в системе
управления. Возможность использования самонастройки без изменения параметров
корректирующего звена (рисунок 8.18,б), получивший название сигнальной самонастройки,
следует из анализа ПФ самонастраивающейся системы.
)()(0)(2)(0)(11
)()(0)(2)(0)(1
)(
11
11
pWнpWpWpWpW
pWнpWpWpWpW
U
у
pW
у
++
+
==
. (8.57)
Предположим для простоты, что 2)(2
1
KpW = и
∞
→2K
Тогда передаточная функция системы W(p) будет приближённо равна ПФ модели
Wн(p) независимо от изменений W0(p). Следовательно, при изменении параметров объекта в
замкнутой системе динамические процессы по управлению будут стабилизированы.
В техническом выполнении такая система довольно проста, однако основным
условием работы системы является условие малых отклонений параметров объекта от
начальных значений. Это условие не является определяющим при выполнении системы по
схеме рисунок 8.18,а.
Системы с эталонами весьма чувствительны к возмущающим воздействиям и помехам.
Это объясняется тем, что модель выполняется ориентируемой на определённ
ое воздействие,
например на управляющее, и все иные воздействия могут искажать процесс самонастройки .
Возникает в таком случае необходимость сигнальной избирательности в работе системы либо
необходимость использования весьма сложных эталонных моделей.
8.12 Адаптивные системы управления со стабилизацией частотных и временных
характеристик
Адаптивные АСУ ЭП со стабилизацией частотных характеристик могут быть весьма
эффективными, если имеются полные сведения о природе нестационарных свойств объекта
управления, об их влиянии на параметры системы. Необходимость в идентификации объекта
или системы в большом диапазоне частот часто не возникает из-за достаточно ясных влияний
имеющихся параметров объекта на частотные свойства системы. Можно, например,
ограничиться информацией о характеристиках системы при одной, дв
ух частотах и на
основании этой информации вводить коррективы в характеристики системы в требуемом
диапазоне частот. Определением для такого подхода является и то, что при построении
систем стремятся к формированию типовых динамических характеристик, вид которых
заранее предопределён и хорошо увязан с изменяющимися параметрами объекта.
Аппарат
урные затраты для выполнения контуров самонастройки в этом случае невелики по
сравнению с затратами на основную часть системы управления.
Wp(p)
ε
tYU
y 00
sin
ω
⋅+
Kp Wo(p)
)(ty
1−
Wм(p) Wф(p)
БВМ1
Wф(p)
БВМ2
р
K
И
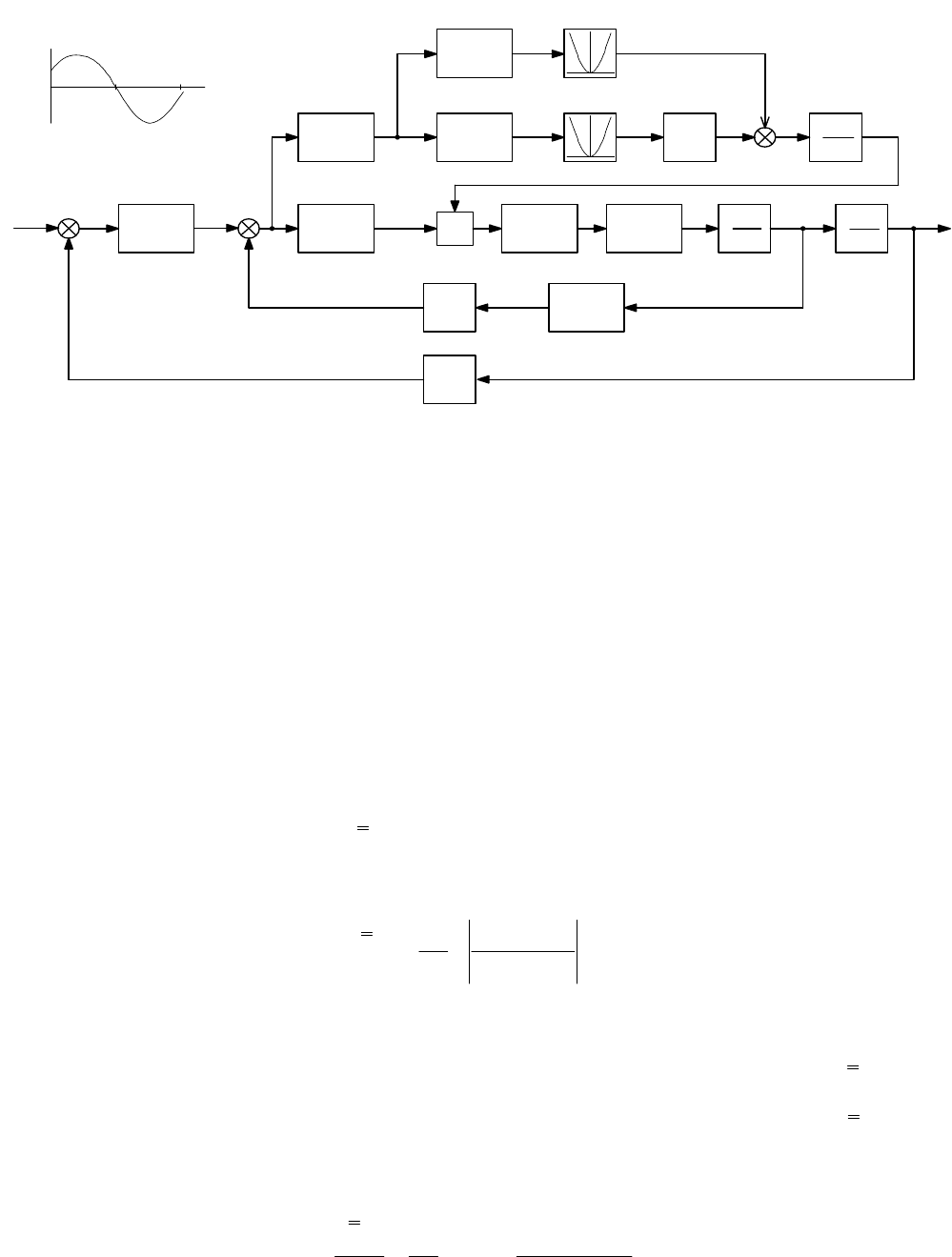
Рисунок 8.19 – Система самонастраивающаяся по значению амплитудной
характеристики на
ср
ω
Рассмотрим в качестве примера систему, самонастраивающуюся по значению
амплитудой характеристики на частоте среза
СР
ω
(рисунок 8.19) .Вместе с полезным
сигналом управления Uy на вход системы подаётся тестовый сигнал Uo*sinw
0
t; частота
СР
ω
ω
=
0
. При изменении параметров объекта, например передаточного коэффициента, в
системе происходит перенастройка коэффициента регулятора Кр таким образом, чтобы
положение типовой частотной характеристики разомкнутой системы не изменялось. С этой
целью в систему введены: модель разомкнутой системы с ПФ Wм(p); узкополосные фильтры
)(
0
pW
Ф
−
ω
; блоки вычисления модуля БВМ1 и БВМ2; сумматор и регулятор контура
самонастройки в виде интегратора с передаточным коэффициентом Ки. ПФ регулятора
основной части системы КрWp(p) выбирается из заданных требование к качеству ПП в
системе при некоторых средних параметрах объекта . Если увеличивается передаточный
коэффициент объекта за счёт изменения момента инерции механизма J или постоянной
двигателя
Д
C
|
, то сигнал на выходе БВМ2 будет превышать сигнал на выходе БВМ1 и за
счёт образовавшегося разностного сигнала будет равен нулю.
Аналогично можно выполнить контроль частотной характеристики разомкнутой
системы в двух, трёх и большем числе точек. Сложность реализации таких систем
заключается в необходимости применения узкополосных фильтров для каждой из этих частот
либо в необходимости дополнительно производить пер
енастройку узкополосного фильтра в
соответствии с изменяющейся частотой тестового сигнала. В простейшем случае при наличии
только одной частоты эталонная модель может быть представлена передаточным
коэффициентом, в частности при частоте среза Wм(p)=1.
Если происходит существенная деформация АЧХ объекта, то при использовании
рассмотренного выше метода можно вводить самонастройку по нескольким параметрам
рег
улятора. Возможно также выполнение самонастраивающихся с контролем амплитудных
и фазовых либо только ФЧХ.
В самонастраивающихся системах, основанных на стабилизации временных
характеристик, могут быть использованы приёмы определения импульсной переходной
функции, изложенные в параграфе 1.
Адаптивная система структурно выполняется аналогично схеме рисунок 8.19, но
сигнал на изменение параметров регулятора вырабатывается на основании оценки
импу
льсной переходной функции и соответствующих характеристик, получаемых по этой
оценке. Например, оценивая соотношение положительных и отрицательных площадей,
ограниченных импульсной переходной функцией, можно судить о степени демпфирования
замкнутой системы управления. В связи с тем, что для оценки импульсной переходной
характеристики и формирования управляющего сигнала на изменение параметров
регуляторов необходимо определённое для данной системы время, применение та
кой
самонастраивающейся системы возможно в тех случаях, когда время изменения параметров
системы ЭП значительно больше времени ПП в контуре самонастройки.
8.13 Адаптивные системы управления, построенные на сравнении
высокочастотных и низкочастотных составляющих сигналов
Важным преимуществом адаптивных систем, построенных на сравнении
высокочастотных и низкочастотных составляющих сигналов, является то, что не требуется
вводить тестовые сигналы. Возбуждение системы происходит за счёт естественных
воздействий по каналам управления, возмущений и помех. Также адаптивные системы
находят применение в тех случаях, когда требуемое качество управления нестационарным
объектом может быть обеспечено путём изменения пер
едаточного коэффициента системы.
Принцип построения адаптивной системы рассмотрим на примере следящей системы
электропривода, структурная схема которой показана на рисунке 8.20.
Wpп(p)
З
ϕ
Кpс
Wф 1(p) Wф 2(p)
Wф3(p)
КП1
КП2
1
−
р
K
И
Z
1
y
2
y
Ф
ε
q
Х
Wв(p) Сд
Jр
1
рi ⋅
1
ϕ
1
−
1
−
Кдс
0
П
ω
С
ω
),(
ω
PC
Kр
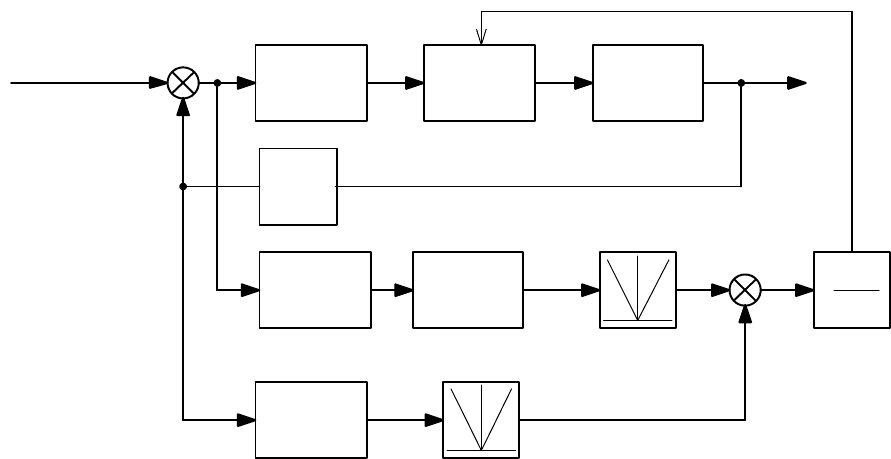
Рисунок 8.20 – Адаптивная система управления на сравнении высочастотных и
низкочастотных составляющих сигналов
Основная часть системы представляет собой трехконтурную систему с обратными
связями по току, скорости и положению. Контур самонастройки включен в контур
регулирования скорости и автоматически стабилизирует динамические свойства последнего
при непрограммируемых изменениях момента инерции электропривода. Выполняется это
путем стабилизации соотношения энергии низкочастотной и высокочастотной составляющих
сигнала ошиб
ки скорости
εω за счет соответствующего изменения передаточного
коэффициента регулятора скорости
..cp
k . Предполагается, что контур регулирования
скорости возбуждается случайным сигналом
q со спектральной плотностью S
q
(
ω
) и ошибка
контура
εω также случайная величина.
Рассматривая основную часть системы управления линейной и квазистационарной,
среднее значение квадрата ошибки
ω
ε
2
(двумя чертами сверху обозначается среднее
значение величины) определим из выражения:
ωω
ωπ
ε
ω
ω
dS
jW
q
)(
)(1
1
2
1
2
2
∫
∞
∞−
+
=
(8.58)
где )(
ω
ω
jW - передаточная функция разомкнутого контура регулирования скорости.
При изменении передаточного коэффициента РС
..cp
k происходит изменение
ω
ε
2
.
Связь этих параметров может быть установлена через частную производную
ω
ε
2
по
..cp
k :
ω
ω
ω
π
ε
ω
d
k
kE
S
k
cp
cp
q
cp ..
..
2
..
2
),(
)(
2
1
∂
∂
=
∂
∂
∫
∞
∞−
(8.59)
где
),(
..
2
ω
cp
kE =
2
)(1
1
ω
ω
jW+
.
Частная производная
....
2
/),(
cpcp
kkE ∂∂
ω
может быть представлена в следующем виде:
),(),(2
),(
....
2
..
..
2
ωω
ω
cpcp
cp
cp
kpkE
k
kE
−=
∂
∂
(8.60)
где ),(
..
ω
cp
kp - вещественная частотная характеристика, соответствующая передаточной
функции
[]
)(1/)()(
3
pWpWpW
ωωω
+=
Выразив спектральную плотность ошибки
εω через спектральную плотность сигнала q
в виде:
)(
)(1
1
2
ω
ω
ω
ε
ω
q
S
jW
S
+
=
(8.61)
можно записать выражение следующем виде:
ωωω
π
ε
εω
ω
dkpS
k
cp
cp
)()(
1
.,.
..
2
∫
∞
∞
−
−=
∂
∂
(8.62)
Производная
/),(
..
2
ω
cp
kE∂
..cp
k∂ может быть положительной, отрицательной и равной
нулю в зависимости от знака под интегральной функции. Знак же этот главным образом
определяется видом вещественной частотной характеристики ),(
..
ω
cp
kp . Характеристика
),(
..
ω
cp
kp имеет положительную и отрицательную части (рисунок 8.20) соответственно в
диапазонах частот и
ω
п
< ω < ω
с
, где частоты ω
п
и ω
с
определяют интервал положительности
и интервал существенных частот системы. Изменяя
..cp
k , можно изменять соотношения
положительных и отрицательных площадей вещественной частотной характеристики и
влиять на ход переходных процессов в системе. Можно подобрать такое значение
..cp
k =
0
k ,
при котором площади будут равны и
∂∂ /
2
ω
ε
0
..
=
cp
k . При этом в системе будет
существовать баланс низкочастотной (0<
ω<ω
п
) и высокочастотной (ω
п
< ω < ω
с
)
составляющих ошибки. Разделение сигнала ошибки по спектральным областям выполняется
фильтрами низких и высоких частот, имеющими передаточные функции соответственно
)(
2
pW
ф
и )(
3
pW
ф
. В качестве таких фильтров могут использоваться фильтры первого и
второго порядков. В частности, для фильтров первого порядка имеем:
1
1
)(
22
+
=
pТ
kpW
ф
фф
;
1
)(
33
+
=
pТ
pT
kpW
ф
ф
фф
(8.63)
где
ф
T - постоянная времени фильтра,
пф
T
ω
/1
=
.
Для того чтобы обеспечить вариацию желаемых динамических характеристик
основной части системы, в контур самонастройки вводится фильтр с передаточной функцией
)(
1
pW
ф
. Тогда в системе обеспечивается условие ∂∂ /
2
ω
ε
0
..
=
cp
k , а вид вещественной
частотной характеристики основной части системы может изменяться в зависимости от
соответствующих изменений частотной характеристики фильтра )(
1
ω
jW
ф
Спектральная плотность ошибки
εω равна:
S
εф
(ω)
SjW
ф
2
1
)(
ω
=
εω
(ω) (8.64)
Имея это в виду и разделяя в характеристике ),(
..
ω
cp
kp положительные и
отрицательные значения в областях частот (0<
ω<ω
п
) и (ω
п
< ω < ω
с
) можно записать:
ωωω
π
ωωω
π
ωωω
π
ε
ω
ω
ε
ω
εε
dkpSdkpSdkpS
k
cpфcpфcpф
cp
ф
С
П
П
)()(
2
)()(
2
)()(
1
.,...,.
0
..,..
..
2
∫∫∫
+−=−=
∂
∂
∞
∞−
(8.65)
Формирование алгоритма самонастройки выполняется на основании синтеза
градиента, в соответствии с которым скорость перенастройки параметра принимается
пропорциональной частной производной от выбранного критерия качества по этому
параметру:
..
2
..
cp
фcp
kdt
dk
∂
∂
−=
ε
γ
, (8.66)
где
γ
- коэффициент пропорциональности при поиске экстремума.
С учетом (8.65) алгоритм самонастройки определяется выражением:
ωωω
π
γ
ωωω
π
γ
ω
ω
ε
ω
ε
dkpSdkpS
dt
dk
cpфcpф
cp
С
П
П
)()(
2
)()(
2
.,...,.
0
.
..
∫∫
−=
(8.67)
Интегралы в выражении определяют энергию высокочастотных и низкочастотных
составляющих сигнала
εф.
В соответствии с алгоритмом реализация контура самонастройки сводится к
разделению сигнала
εф на сигналы у
1
и у
2
по спектральным областям 0--ω
п
и ω
п
--ω
с
и сравнению энергии этих сигналов. В соответствии с энергетической формой
интеграла Фурье полная энергия сигналов у
1
(t) и у
2
(t) определяется выражениями:
∫∫
∞
∞−
∞
∞−
=
ωω
π
djYdtty
2
1
1
2
)(
2
1
)(
(8.68)
∫∫
∞
∞−
∞
∞−
=
ωω
π
djYdtty
2
2
2
2
)(
2
1
)(
(8.69)

где
)(
1
ω
jY и )(
2
ω
jY - преобразование Фурье для сигналов у
1
(t) и у
2
(t);
)()(
21
ω
ω
jWjY
ф
=εф );(
ω
j
)()(
32
ω
ω
jWjY
ф
=εф );(
ω
j
а
2
1
)(
ω
jY
и
2
2
)(
ω
jY
- распределение энергии сигналов по частотам.
Оценка энергии сигналов в соответствие с этими интегралами должна производиться
на больших интервалах времени, что неприемлемо для быстродействующих
самонастраивающихся систем управления. В контуре самонастройки происходит сравнение
сигналов непрерывно по текущему спектру, что фактически соответствует сравнению их
мгновенных мощностей. Сигналы у
1
(t) и у
2
(t) поступающие с фильтров низких и высоких
частот, преобразуются в квадратичных преобразователях КП1 и КП2 (рисунок 8.20) в
сигналы у
1
2
(t) и у
2
2
(t) , которые несут в себе информацию о мгновенных мощностях.
Разностный сигнал Z на входе интегратора пропорционален разности мгновенных мощностей
сигналов. На выходе интегратора формируется сигнал Z
’
для изменения передаточного
коэффициента регулятора скорости
'
.
'
..
Zkk
cp
cp
=
, где
cp
k
.
'
- некоторая неизменяемая часть
коэффициента.
Расчет передаточного коэффициента интегратора
и
k производится из условия
обеспечения устойчивости контура самонастройки и зависит также от спектрального состава
сигнала ошибки
εω.
Фильтр с передаточной функцией )(
1
pW
ф
, кроме формирования желаемой
вещественной частотной характеристики, исключает из сигнала ошибки
εω. Постоянную
составляющую.
8.14 Адаптивные системы управления с наблюдающим устройством
идентификации
Рассмотрим применение адаптивного наблюдающего устройства идентификации в
самонастраивающейся следящей системе. В электроприводе происходят непрограммируемые
изменения момента инерции. Для простоты считаем, что в замкнутой следящей системе
обратной связью по ЭДС двигателя можно пренебречь и момент сопротивлении остается
постоянным.
В качестве управляющего воздействия на нестационарную часть объекта
рассматривается ток двигателя, а в качестве выходной коорди
наты скорость двигателя.
Неизвестная линейная часть объекта имеет передаточную функцию:
,)(
p
b
Jp
c
u
y
pW
д
=
′
==
где, обозначением координат объекта, принято: .;
я
iuy
&
==
ω
Идентификации подлежит параметр ./
Jcb
д
′
=
Структурная схема наблюдающего устройства, для объекта первого порядка, показана
на рисунок 8.21, а.
1
ˆ
b
1
ˆ
ω
1
ˆ
x
Объект управления
1-го порядка
u
y
1
1
λ
+
−
p
y
ˆ
−
i
β
p
1
Х
i
b
ˆ
/
1
ˆ
a
yy
ˆ
−
u
y
y
ˆ
−
p
β
Х
b
ˆ
Х
p
b
λ
1
1
λ
+
−
p
u
y
y
ˆ
−
p
β
Х
b
ˆ
Х
p
b
λ
p
1
а)
б) в)
Рисунок 8.21 – Структурная схема наблюдающего устройства
Имеем
.
;0
ˆ
;0...
;
ˆˆ
;
1
1111
21
11
ββ
λλλ
=
=+=+=
===
==
aa
aa
bbbb
(8.70)
С учетом равенств представим структурную схему наблюдающего устройства в виде
рисунка 8.21, б, и, выполнив ее преобразования, получим в окончательном виде схему
(рисунок 8.21, в).
Рисунок 8.22 - Структурная схема адаптивной следящей системы с наблюдающим
устройством идентификации параметра
JС
д
/
′
Алгоритм работы наблюдающего устройства описывается уравнениями:
()
).
ˆ
(
/
ˆ
);
ˆ
(
ˆ
ˆ
.
.
ωωβ
ωωλ
ω
−=
′
−+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
′
=
ясд
д
сдя
д
ik
dt
JCd
ki
J
C
dt
d
(8.71)
Начальные условия:
.0)0)(/
ˆ
(;0)0(
ˆ
=
′
= JС
д
ω
Если ввести обозначения )/(/,
ˆ
JCJCe
дд
′
−
′
=
−
=
ν
ω
ω
и принять во внимание, что
,
я
д
i
J
C
dt
d
′
=
ω
(8.72)
то алгоритм работы наблюдающего устройства в координатах е и v может быть описан
уравнениями:
.
,
.
.
еik
dt
d
eki
dt
de
ясд
сдя
β
ν
λν
−=
−=
(8.73)

При этом принимаются начальные условия:
JCe
д
/)0(,0)0(
′
=
=
ν
и на основании
гипотезы квазистационарности считается, что на временном интервале, соответствующем
переходному процессу в наблюдающем устройстве, изменение параметра
JC
д
/
′
отсутствует.
Устойчивость наблюдающего устройства при идентификации параметра
JC
д
/
ˆ
′
может
быть установлена на основании второго метода Ляпунова. Для проверки условия
асимптотической устойчивости наблюдающего устройства рассматривается функция
Ляпунова в виде положительно-определенной квадратичной формы ошибки е и параметра v:
.
1
2
1
2
1
2
.
2
ν
β
сд
k
eV +=
(8.74)
Полная производная функции
V по времени:
.
2
.
ek
dt
dV
сд
λ
−=
(8.75)
Так как iя не равно нулю, то очевидно тождественное равенство нулю параметра v.
Следовательно, функция
dV/dt является отрицательно-определенной и при построении
наблюдающего устройства величина
)(/
ˆ
tJC
д
′
асимптотически приближается к параметру
JC
д
/
′
.
Сходимость процесса оценки зависит от коэффициентов
λ
и
β
которые практически
всегда могут быть выбраны из условия протекания в системе процесса оценки быстрее
основного переходного процесса и из требований помехоустойчивости системы.
Оценка
JC
д
/
ˆ
′
параметра JC
д
/
′
используется для настройки регулятора скорости, т. е.
k
р.с.
Выполнив стандартную настройку контура регулирования тока якоря на оптимум по
модулю, передаточный коэффициент PC можно рассчитать по формуле
.
4
.1
.
.
сдд
тд
ср
kCТ
Jk
k
′
=
μ
(8.76)
Разделяя k
р
.
с
на два сомножителя.
,
... cpcpср
kkk
′
′
′
=
(8.77)
где )4/(
.1., сдтдcp
kТkk
μ
=
′
— постоянная величина, a
дcp
CJk
′
=
′
′
/
.
- переменная величина, можно
П - регулятор скорости представить в виде последовательно соединенных звеньев:
пропорционального с постоянным коэффициентом
cp
k
,
′
и множительного. На один вход
множительного звена поступает сигнал со звена с коэффициентом
cp
k
,
′
, а на второй вход — с
наблюдающего устройства через блок деления БД (рисунок 8.22). Блок деления выполняет
операцию
)./
ˆ
/(1 JС
д
′
При непрограммируемых изменениях момента инерции электропривода адаптивная
следящая система будет иметь практически постоянные динамические характеристики за счет
соответствующего изменения передаточного коэффициента
cp
k
.
′
′
. Для иллюстрации этого на
рисунке 8.23 показаны кривые переходных процессов в приращениях координат в контуре