Конспект лекций Системы управления электроприводами
Подождите немного. Документ загружается.

напряжения преобразователя U
отс
, снимаемой с резистора R
1
процессе перемотки U
вед
> U
отс
и диод V
закрыт. На холостом ходу ток якоря мал и система регулирования, стремясь
поддержать постоянство мощности, увеличивает скорость двигателя за счет увеличения
напряжения преобразователя. Когда напряжение U
отс
станет больше U
вед
, на вход регулятора
(Р)
поступит отрицательный сигнал, ограничивающий рост напряжения.
Учет потерь представляет собой достаточно сложную задачу, так как потери не зависят
однозначно от скорости двигателя, а определяются всем комплексом факторов,
действующих в процессе перемотки и носящих часто случайный характер. Однако в ряде
случаев удается выделить постоянную составляющую потерь и составляющую,
приблизительно пропорциональную скорости наматывающего ус
тройства. Для примерной
компенсации потерь в цепи возбуждения L(ИГ)
действуют постоянное напряжение U
0
и
часть напряжения преобразователя с делителя R5
, приблизительно пропорциональная
скорости двигателя М
. Оба этих напряжения действуют встречно падению напряжения на
шунте. В результате ЭДС ИГ
уменьшается и замкнутая система, поддерживая ее в
соответствии с U
вед
, увеличивает электромагнитную мощность приблизительно на мощность
потерь.
rp
V
M
+
-
Uотс
L(M)
V
R1
ЗНт
+
-
Uвед
ИГ
L(ИГ)
Ш
R2
Uо
R3 РЗ
R4
РУ
R5
Пр
Р
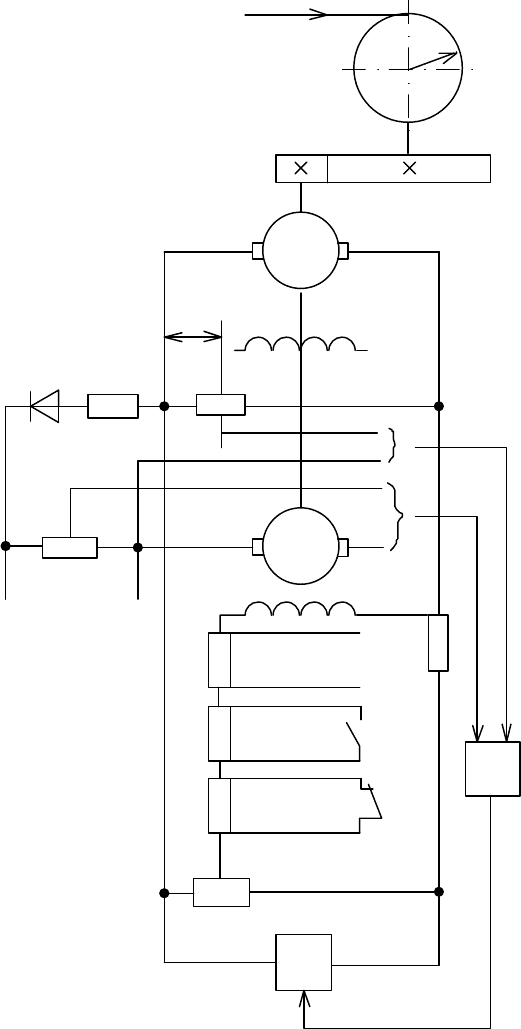
Рисунок 7.11 – Схема измерения электромагнитной мощности
Режимы ускорения и замедления контролируются включающимися на это время реле
соответственно РУ
и РЗ. При разгоне в процессе намотки, когда электромагнитную
мощность надо увеличить, в цепь L(ИГ)
вводится сопротивление R4, а при замедлении,
когда ее надо уменьшить, — исключается R3
.
Недостатком системы с поддержанием на постоянном уровне электромагнитной
мощности является низкая точность измерения мощности. Одной из причин этого является
непостоянство потока возбуждения двигателя, который фактически зависит от реакции
якоря. Кроме того, зависимость потока возбуждения ИГ
от якорного тока может считаться
линейной только приблизительно.

7.9 Автоматическая система управления электроприводом с регулированием
мощности
В соответствии со сформулированным в пункте 7.6 принципом косвенного
поддержания натяжения на постоянном уровне, когда поток двигателя должен меняться
пропорционально r
р
, а ток при F = const сохраняется постоянным, большинство систем
регулирования натяжения строится из двух взаимосвязанных систем: системы стабилизации
тока якоря двигателя наматывающего устройства с воздействием на напряжение главного
преобразователя и системы регулирования ЭДС двигателя с воздействием на поток
возбуждения. Поскольку
p
r
Vi ⋅
=
ω
, а
Фke
д
⋅
⋅
=
ω
, то при
Vk
r
V
Фkie
p
д
⋅=⋅⋅⋅⋅=
2
ω
поток изменяется пропорционально радиусу рулона
рмакс
p
макс
r
r
ФФ ⋅=
,
(7.39)
где r
рмакс
— максимальный радиус рулона, а Ф
макс
— соответствующий поток.
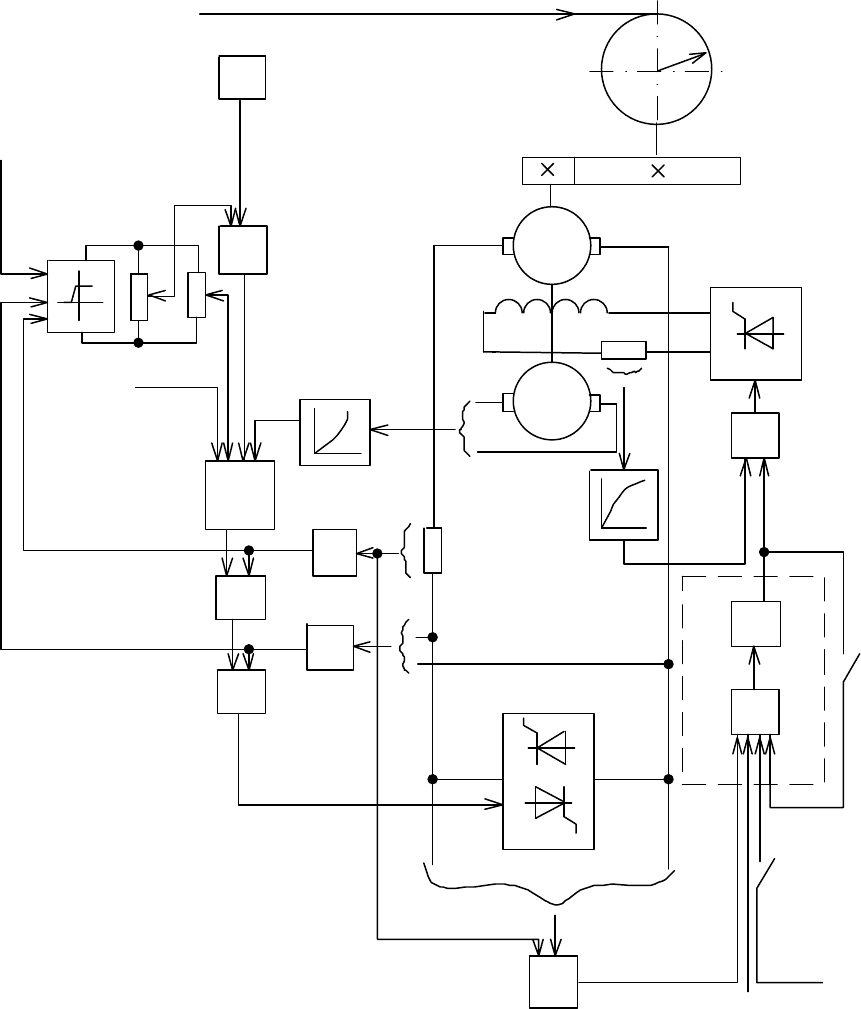
Схема электропривода наматывающего устройства с косвенным поддержанием
натяжения на постоянном уровне и коррекцией его по сигналу датчика натяжения приведена
на рисунке 7.12. Система управления током якоря включает в себя контур регулирования
тока с датчиком ДТ
и регулятором РТ и подчиненный контур регулирования напряжения с
датчиком ДН
и регулятором РН, выходное напряжение которого воздействует на вход
системы управления реверсивного тиристорного преобразователя (ТП1)
. Предписанное
значение тока якоря формируется в виде задающего напряжения на выходе
пропорционального усилителя и состоит из четырех слагаемых: основного задающего
сигнала, пропорционального заданному натяжению и снимаемого с задатчика натяжения
(ЗНт)
; сигнала компенсации динамической составляющей тока u
к
; сигнала компенсации
потерь и сигнала коррекции по натяжению с выхода регулятора натяжения (РНт).
При компенсации потерь приближенно предполагается, что их значение зависит от
скорости рулона и эта зависимость моделируется функциональным преобразователем
(ФП1).
Система регулирования ЭДС построена принципиально так же, как соответствующий
контур в системе двухзонного регулирования, с той лишь разницей, что внутренний контур
за счет включения функционального преобразователя ФП2,
который моделирует
характеристику намагничивания двигателя, представляет собой контур регулирования
потока с регулятором РПт
, а не контур регулирования тока возбуждения. Благодаря этому
сигнал на выходе регулятора ЭДС (РЭ),
являющийся предписанным значением
регулируемой величины для внутреннего контура, в процессе перемотки пропорционален
потоку возбуждения, а, следовательно, и радиусу рулона, и может служить мерой радиуса.
Регулятор ЭДС включает в себя суммирующий усилитель У2,
на входе которого сигнал
датчика ЭДС сравнивается с задающим напряжением, пропорциональным скорости
перемотки, и аналоговый или цифровой интегратор И
. В результате РЭ имеет
характеристики интегрирующего регулятора, что, с одной стороны, необходимо для
обеспечения стандартной или близкой к ней настройки контура ЭДС, а с другой — важно
для того, чтобы регулятор «запоминал» радиус рулона.
V
r
p
M
L(M)
ТП2
Ш2
BR
РПт
ФП2
РЭ
И
У2
ЗР
ЗР
Ш1
ТП1
ДЭ
Uз.р
Uз
Uд.э
РН
-
ДН
РТ
ДТ
У1
ФП1
-
Uk
У3
ЗНт
РНт
Uз
ДНт
Рисунок 7.12 – Схема электропривода наматывающего устройства с косвенным
поддержанием натяжения
Принцип построения системы предусматривает, что всегда, вне зависимости от режима
работы (разгон, установившийся режим перемотки, торможение, выключенное состояние),
поток возбуждения двигателя пропорционален радиусу рулона. В режиме перемотки это
обеспечивается автоматически за счет действия замкнутой системы регулирования ЭДС.
При неподвижном наматывающем у
стройстве сигналы U
д.э
и U
з
равны нулю и необходимо
предусмотреть возможность задания начального потока возбуждения, соответствующего
данному (если речь идет о начале намотки — минимальному) значению радиуса рулона. Это
осуществляется при охвате РЭ
отрицательной обратной связью через контакты ЗР.
Регулятор ЭДС приобретает характеристики апериодического звена с единичным
коэффициентом усиления, и на выходе его устанавливается напряжение, равное напряжению
задания радиуса рулона u
з.р
. Перед началом перемотки контакты ЗР размыкаются, и это
напряжение на выходе интегратора сохраняется, пока на входе РЭ
сигнал равен нулю.
Поток возбуждения, соответствующий текущему значению радиуса рулона, нужно
сохранить и при обрыве полосы. Обычно обрыв фиксируется специальным датчиком,
воздействующим на реле, которое своим контактом (на рисунке 7.11 не показан) шунтирует
У2
, благодаря чему напряжение на входе интегратора становится равным нулю, а на его
выходе фиксируется напряжение, соответствующее значению радиуса рулона, при котором
произошел обрыв. Однако даже при обеспечении фиксации требуемого значения потока,
если не принять дополнительных мер, скорость наматывающего устройства будет резко
возрастать. Действительно, если предположить, что напряжение, снимаемое с ЗНт
,
постоянно, резкое уменьшение якорного тока при обрыве полосы приведет к тому, что
замкнутая система регулирования тока, стремясь восстановить заданный ток, будет
увеличивать напряжение преобразователя ТП1 и это приведет к увеличению скорости
двигателя. Чтобы этого не произошло, ЗНт
питается от усилителя УЗ, характеристика
которого такова, что при входном сигнале, равном нулю, его выходное напряжение равно
напряжению ограничения. На входе сигнал УЗ U
3
= V сравнивается с сигналом обратной
связи по ЭДС. В нормальном режиме намотки задающий сигнал примерно равен сигналу
обратной связи, напряжение на выходе УЗ
равно напряжению ограничения и постоянно.
При обрыве, когда ЭДС начинает возрастать, сигнал обратной связи оказывается больше U
3
,
усилитель УЗ выходит из ограничения и система переходит в режим поддержания
постоянства ЭДС за счет воздействия на напряжение преобразователя. Поскольку поток
двигателя при этом соответствует значению радиуса рулона, при котором произошел обрыв,
система поддерживает скорость двигателя, примерно соответствующую данным значениям
скорости V
и радиуса r
р
.
Назначением сигнала u
к
является задание динамической составляющей тока, за счет
которой создается динамический момент Мдин = Мдин1 + Мдин2 составляющие которого
определяются формулами (7.36) и (7.38). Если толщина перематываемой полосы мала, то
радиус рулона меняется медленно и скорость изменения радиуса dr
р
/dt мала. Тогда
составляющей М
дин2
пренебрегают, полагая, что М
дин
= М
дин1
. С учетом того, что система
регулирования ЭДС меняет поток пропорционально радиусу, можно определить закон, по
которому должен меняться динамический ток при разгоне и торможении:
max
max
11
Фk
r
r
М
Фk
М
i
p
p
диндин
диня
⋅
⋅=
⋅
=
или, с учетом первого из выражений (7.36),
max
max
0
2
3
)
2
10
(
Фk
r
dt
dV
r
iJ
r
i
Bq
i
p
p
pдиня
⋅
⋅⋅
⋅
+⋅
⋅
⋅⋅⋅
=
π
.
(7.40)
Если У1
представляет собой усилитель с передаточным коэффициентом, равным
единице, одинаковым по всем входам, и коэффициент передачи
РТ по обоим каналам тоже
одинаков, то компенсирующее напряжение должно быть
диндтk
iku
⋅
= .
(7.41)
Из (7.40) видно, что это напряжение связано функциональной зависимостью с
радиусом рулона r
p
и прямо пропорционально ускорению при установившейся скорости
u
k
=0.
u=rp
ФП
u
фп
КУ
КЗ
ДН
КЗ
КУ
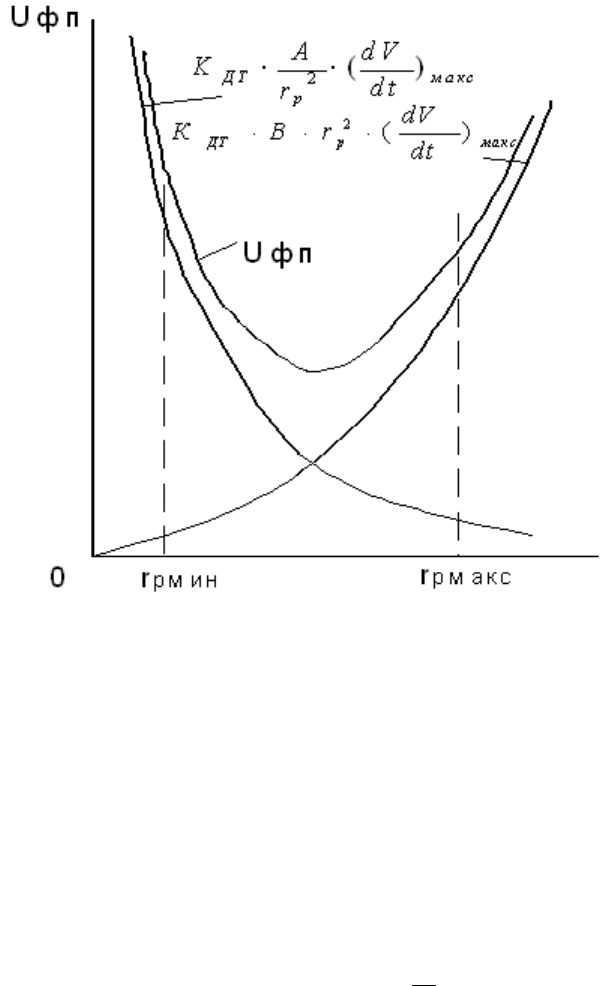
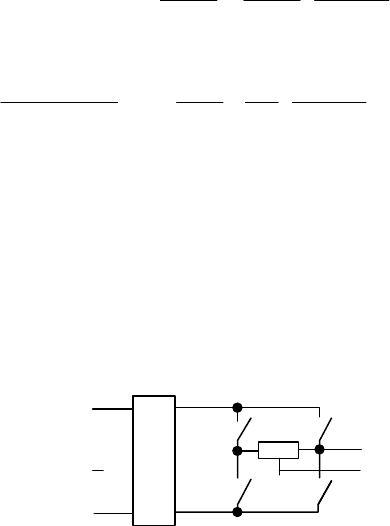
Рисунок 7.13– Функциональная схема устройства, формирующего напряжение u
k
Рисунок 7.14 – Зависимость u
ФП
=f(r
p
) при dV/dt=const
Функциональная схема устройства, формирующего напряжение u
k
, показана на
рисунке 7.13. Напряжение на входе функционального преобразователя (ФП)
пропорционально радиусу рулона. С помощью ФП в соответствии с (7.40) и (7.41)
формируется напряжение u
ФП
равное u
к
при (dV/dt)
макс
. Реальное значение ускорения
задается установкой делителя напряжения (ДН)
. Компенсирующее напряжение имеет
разный знак при ускорении и замедлении, что обеспечивается включением контактов КУ
или КЗ соответственно. В установившемся режиме все контакты разомкнуты. В качестве
напряжения, пропорционального радиусу рулона, может быть использовано напряжение на
выходе регулятора ЭДС, если подчиненным контуром является контур потока (рисунок
7.12). В ряде схем оно получается как результат деления напряжения датчика скорости
(тахогенератора) на двигателе наматывающего устройства
p
дсдсдс
r
V
kku ⋅=⋅=
1
ω
на напряжение тахогенератора на двигателе М2 клети или секции (рисунок 7.13)
Vku
дсk
⋅
=
3
,
где
3
k – коэффициент пропорциональности.
Характер зависимости u
ФП
от радиуса рулона при dV/dt = const показан на рисунке
7.14. При разных соотношениях r
pмакс
и r
рмин
она может быть аппроксимирована более или
менее сложной кривой.
В схемах, где не предъявляется высоких требований к поддержанию постоянства
натяжения, применяются более простые способы компенсации динамического тока, когда на
время разгона и торможения уставки тока меняются на постоянную величину (рисунок 7.11).
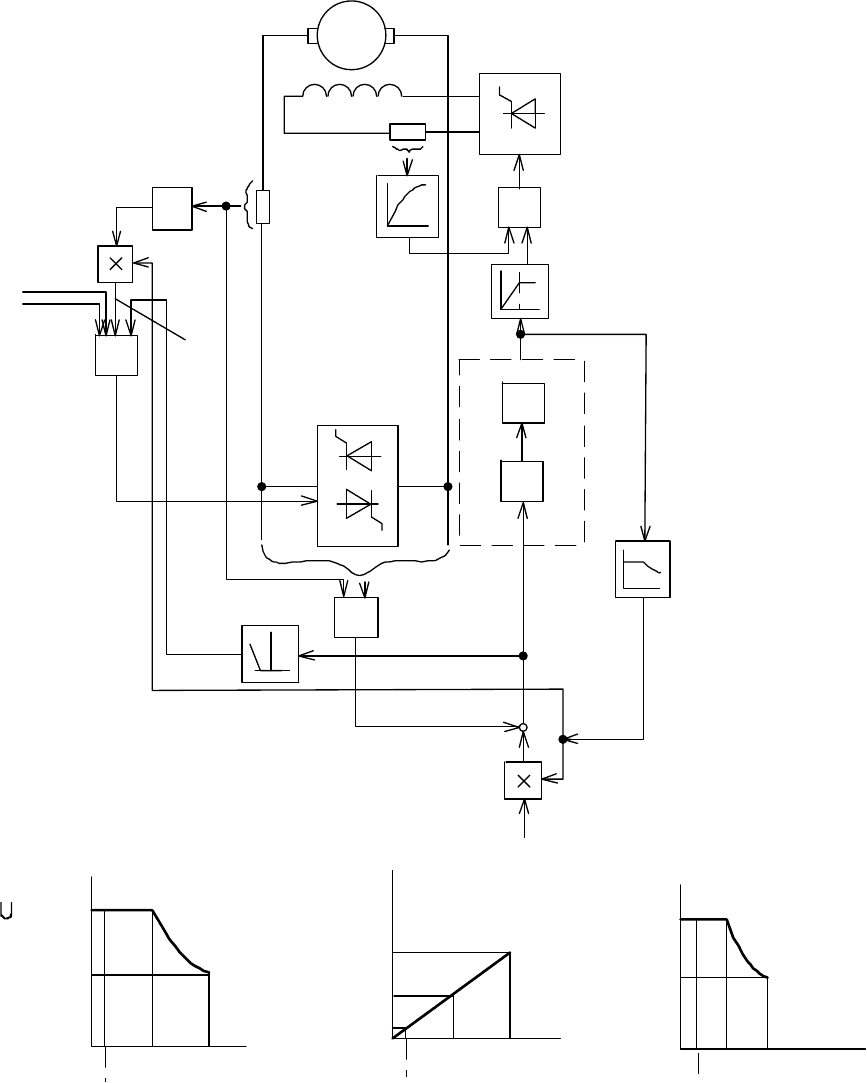
Описанная система косвенного регулирования (рисунок 7.12) дополнена внешним
контуром прямого регулирования натяжении с датчико
м ДНт и регулятором РНт. В силу
того, что в контур регулирования натяжения входит упругое полотно, обычно этот контур

имеет не слишком высокое быстродействие. Однако его применение позволяет уменьшить
влияние возмущений, обусловленных потерями вращения и составляющей динамического
момента M
дин2
. На входе РНт сравниваются уставка натяжения с ЗНт и сигнал датчика
натяжения ДНт
. Если заданная уставка якорного тока обеспечивает заданное натяжение, то
напряжение на выходе РНт
равно нулю. Если установившееся значение натяжения не
соответствует заданному, уставка тока корректируется выходным напряжением регулятора
натяжения.
7.10 Система двухзонного управления электроприводом наматывающего
устройства
Как следует из выражения (7.39), регулирование скорости двигателя наматывающего
устройства в процессе изменения радиуса рулона за счет потока возбуждения требует, чтобы
двигатель был рассчитан на предел изменения потока
рмин
рмакс
мин
макс
r
r
Ф
Ф
=
.
Режим работы наматывающего устройства обычно является циклическим и включает в
себя заправку полосы, разгон двигателя до рабочей скорости, работу на рабочей скорости,
торможение и паузу. При достаточно большой толщине перематываемого материала время
намотки готового рулона составляет несколько минут. В этих условиях выбор
установленной мощности двигателя должен осуществляться по среднеквадратичному
значению тока.
В ряде сл
учаев можно использовать двигатель меньшего габарита, если применить
комбинированное (двухзонное) управление, при котором ток якоря и ЭДС двигателя
поддерживаются постоянными при изменении радиуса от r
рмин
до некоторого граничного
значения r
р0
. При r
р0
≤ r
p
≤ r
pмакс
поддерживается постоянство электромагнитной мощности
двигателя при постоянном значении потока.
В первой зоне регулирования, при r
p
≤
r
р0
, система комбинированного управления
(рисунок 7.15,а)
работает так же, как на рисунке 7.12. Поскольку напряжение на выходе РЭ
пропорционально радиусу рулона, выходное напряжение функционального преобразователя
ФПЗ
, включенного на выход регулятора ЭДС, оказывается зависящим от r
р
. При r
р
≤ r
р0
это
напряжение неизменно. Умножение на u
ФП3
= const напряжений U
3
и u
дт
множительными
устройствами МУ1
и МУ2 не вызывает изменений в работе системы: ток якоря и ЭДС в
установившемся режиме перемотки остаются неизменными и поток меняется
пропорционально радиусу рулона.
Когда радиус рулона, а следовательно, и u
рэ
достигнут граничных значений и будут
далее увеличиваться, коэффициент передачи функционального преобразователя ФП2
,
равный до сих пор единице, станет равным нулю, а напряжение на его выходе будет далее
оставаться постоянным и соответствующим номинальному значению потока возбуждения. В
то же время напряжение на выходе ФПЗ
, бывшее до сих пор постоянным и равным U
ФП3макс
,
начнет уменьшаться, благодаря чему образуется замкнутый контур регулирования
напряжения регулятора ЭДС, включающий в себя РЭ
, ФПЗ и МУ1. Задача этого контура
состоит в том, чтобы и при
r
p
> r
p0
напряжение на выходе РЭ, которое перестало быть
эталонным для контура потока, менялось пропорционально радиусу рулона. Это
обеспечивается выбором требуемой функциональной зависимости, которая моделируется
ФПЗ
. В контуре поддерживается примерное равенство
1мудэ
uu
≈
.

Во второй зоне, когда поток возбуждения постоянен и равен номинальному значению
Ф
н
, эти напряжения равны
pндэндэддэдэ
rVФkkФkkеku /⋅⋅⋅
=
⋅
⋅
⋅
=
⋅
=
ω
, а
341311 фпмуфпзмуму
uVккuUкu ⋅⋅⋅=⋅⋅=
, откуда
p
p
максфп
pму
ндэ
фп
r
r
U
rkk
Фkk
u
0
3
41
3
1
⋅=⋅
⋅
⋅⋅
=
,
где )/(
0413 pмундэмаксфп
rkkФkkU ⋅⋅⋅⋅= .
Вид этой зависимости, а также линейной характеристики u
рэ
=f(r
p
) и построенной на их
основании требуемой характеристики ФПЗ
показан на рисунке 7.15,б.
Переход от режима поддержания постоянства тока к режиму поддержания постоянства
мощности осуществляется за счет того, что во второй зоне по мере увеличения радиуса
рулона напряжение на выходе МУ2
, равное
p
я
pфпдтмуфпдтмуму
r
i
rukkuuku ⋅⋅⋅⋅=⋅⋅=
032322
,
стремится уменьшиться, а замкнутая система регулирования тока поддерживает его,
воздействуя на ТП1
, т. е. увеличивая напряжение на якоре двигателя.
Если передаточные коэффициенты по входам РТ
одинаковы, то напряжение на выходе
МУ2 и напряжение задания натяжения (рисунок 7.15,а) равны друг другу:
знтму
Uu
≈
2
,
т.е. поддерживается постоянство отношения i
н
/r
p
.
При Ф=const электромагнитная мощность есть
p
нянядяэм
r
V
ФkiФkiеiP ⋅⋅⋅=⋅⋅⋅=⋅=
ω
.
Таким образом, при постоянной скорости перемотки
V поддерживаемое постоянным
напряжение u
му2
оказывается во второй зоне регулирования пропорциональным
электромагнитной мощности двигателя.
В установившемся режиме перемотки, при u
му1
>u
дэ
напряжение на выходе ФП4 равно
нулю. При обрыве полотна, когда ЭДС двигателя возрастает, напряжение на входе ФП4
меняет знак, а на вход РТ поступает сигнал, ограничивающий скорость двигателя.
M
L(M)
Ш2
ТП2
РФ
ФП2
ФП1
РЭ
И
У
u
р.э
ФП3
Uз=k
4V
MУ1
u
му1
ДЭ
ФП4
ТП1
Ш1
u
дт1
MУ2
ДТ
u
дэ
-
u
фп3
uз.нт
uk
РТ
u
му2
-
Uфп3
фп3 макс
Uфп3 мин
0
r
p
rp мин
rp0
rp макс
rp
rp макс
rp0
rp мин
Uр.э мин
Uр.э0
Uр.э
макс
Uр.э
0
U
фп3
Uфп3 макс
Uфп3 мин
0
Uр.э
мин
Uр.э0
Uр.э
макс
Uр.э
а)
б)
-
Рисунок 7.15 – Система комбинированного управления
Глава 8 Основные положения по организации адаптивных систем
управления электроприводом
Необходимость в адаптивных системах управления возникает в связи с значительным
усложнением решаемых задач управления.
Неадаптивные методы управления, как правило, предусматривают наличие
достаточного объема априорных сведений о внутренних и внешних условиях работы объекта
еще на предварительной стадии разработки системы. Отсюда видно, что создание адаптивных
систем управления осуществляется а принципиально иных условиях
?
т.е. адаптивные методы
должны способствовать достижению высокого качества управления при отсутствии
достаточной полноты априорной информации о характеристиках управляемого процесса или
в условиях неопределенности.
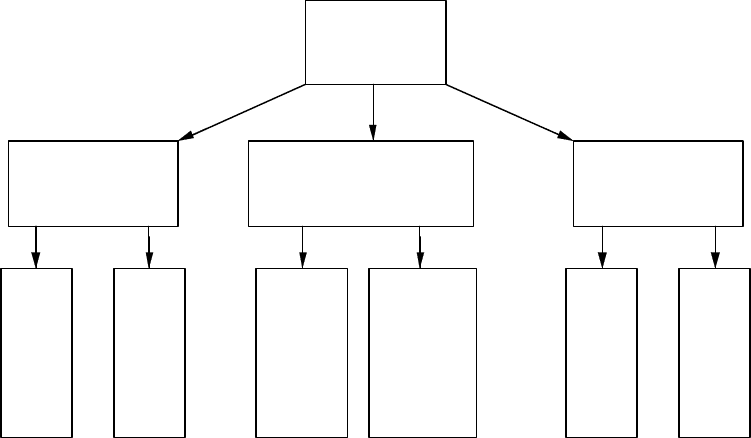
8.1 Классификация адаптивных систем
Поскольку адаптивные системы широко используют рабочую информацию для
анализа динамического состояния системы управления и организации контролируемых
изменений свойств, параметров, управляющих воздействий и структуры системы управления,
то в зависимости от способов реализации таких контролируемых изменений в процессе
нормальной эксплуатации системы можно провести следующую классификацию адаптивных
систем: самонастраивающиеся системы, системы с адаптацией в особых фазовых состояниях
и обучающиеся системы.
Поисковые
СНС
Беспоисковые
СНС
Релейные
автоматическ.
системы
Адаптивные
системы с
перемен.
структурой
Обучающиеся
Самообучаю-
щиеся
Самонастра-
ивающиеся
системы (СНС)
Системы с
адаптацией в особых
фазовых состояниях
Обучающиеся
системы
Адаптивные
СУ
Рисунок 8.1 - Классификация адаптивных систем
Самонастраивающиеся системы (СНС) характеризуются наличием специальных
контуров самонастройки, с помощью которых оцениваются динамические и статические
свойства системы и формируются такие контролируемые воздействия, что система
самопроизвольно приближается к определенному эталону, часто задаваемому математически
в виде критерия качества функционирования. В процессе работы системы значение
функционала качества изменяется и задача контура самонастройки сводится к обеспечению