Конспект лекций Системы управления электроприводами
Подождите немного. Документ загружается.

В.А. Селиванов
Системы управления
электроприводами
Учебное пособие для студентов высших учебных заведений
обучающихся по специальности 1 53 01 05 «Автоматизированные
электроприводы»
Могилев 2010
ОГЛАВЛЕНИЕ
Введение
Глава 1. Основные функции и классификация систем управления
электроприводами
1.1. Классификация систем автоматического управления (СУЭП)
1.2. Основные функции СУЭП
1.3. Дополнительные функции СУЭП
1.4. Электрические схемы СУЭП и предъявляемы к ним требования
1.5. Классификация электрических схем
Глава 2. Общие вопросы управления электроприводами
2.1. Математическое описание нелинейных СУЭП и их линеаризация
2.2. Формы математического описания линеаризованных СУЭП
Глава 3. Управление электроприводами при помощи релейно-контакторной
аппаратуры
3.1. Основные положения
3.2. Узлы пуска и торможения электродвигателей, работающие по принципу времени
3.3. Узлы пуска и торможения двигателей, работающие по принципу скорости
3.4. Узлы пуска и торможения электродвигателей, работающие по принципу тока
3.5. Узлы пуска и торможения электродвигателей, работающие по принципу пути
3.6. Типовые узлы схем автоматического управления электроприводами переменного и
постоянного тока
3.6.1. Основные схемы узлов статорных цепей асинхронных двигателей с
короткозамкнутым ротором
3.6.2. Узлы пусковых роторных сопротивлений асинхронных машин
3.6.3. Узлы схем, обеспечивающие пуск синхронных машин (СМ)
3.6.4. Узлы схем главных цепей машин постоянного тока
3.7. Узлы защиты применяемые в СУЭП
3.8. Блокировки и сигнализации применяемые в СУЭП
Глава 4. Системы управления электроприводами постоянного тока
4.1. Типовая система «управляемый преобразователь – двигатель» с суммирующим
усилителем
4.2. Поддержание скорости вращения двигателем постоянного тока с обратной связью
по напряжению
4.3. Работа типового узла по току в СУЭП
4.4. Поддержание скорости вращения двигателя с обратной связью по скорости
4.5. Система управления электроприводами с несколькими обратными связями,
поддерживающими постоянство скорости двигателя
4.6. Структурная схема СУЭП
4.7. Статические характеристики СУЭП с отсечками
4.8. Системы управления электроприводами с электромашинными усилителями
4.9. Системы управления с магнитными усилителями
4.10. Типовые СУЭП с подчиненным регулированием координат
4.11. СУЭП с управляемыми вентильными преобразователями
4.12. СУЭП с совместным управлением группами вентилей преобразователя
4.13. СУЭП с раздельным управлением преобразователя
4.14. СУЭП с двухзонным регулированием скорости
4.15. СУЭП с импульсным управлением двигателями постоянного тока
Глава 5. Система управления скоростью электроприводов переменного тока
5.1. Особенности и классификация управления электроприводов переменного тока
5.2. СУЭП переменного тока с тиристорным преобразователем напряжения
5.3. СУЭП асинхронного электропривода с преобразователями частоты
5.4. СУЭП с асинхронным двигателем каскадных схем
5.5. Системы управления асинхронным двигателем с воздействием на добавочное
сопротивление в цепи ротора
5.6. Системы управления синхронного электропривода
Глава 6. Системы управления положением исполнительного органа
6.1 Принципы построения систем управления положением
6.2 СУП механизма в режиме позиционирования
6.3 Позиционная система при обработке средних и больших перемещений
6.4 Параболический регулятор положения
6.5 Система уп
равления положением механизма в режиме слежения
Глава 7. Взаимосвязанные системы управления электроприводами
7.1 Основные положения по организации взаимосвязанных систем управления
электроприводами
7.2 Требования к взаимосвязанным электроприводам многодвигательных агрегатов
7.3 Классификация, структура и синтез многодвигательных систем управления
электроприводами (МЭП)
7.4 Математическое описание взаимосвязанных электроприводов непрерывно-
поточных агрегатов
7.5 Системы управления скоростью и соотношением скоростей взаимосвязанных
многодвигательных электроприводов
7.6 Методы регулирования натяжения посредством измерения усилия, момента и
мощности
7.7 Задача поддержания натяжения в процессе разгона и торможения
7.8 Автоматическая система управления электроприводом с регулированием мощности
7.9 Автоматическая система управления электроприводом с регулированием мощности
7.10 Система двухзонного управления электроприводом наматывающего устройства
Глава 8. Основные положения по организации адаптивных систем управл
ения
электроприводом
8.1 Классификация адаптивных систем
8.2 Самонастраивающиеся системы
8.3 Организация движений к экстремуму в поисковых адаптивных системах управления
8.4 Регулярные методы поиска экстремума
8.5 Метод градиента
8.5 Геометрические методы поиска
8.6 Методы шагового поиска
8.7 Адаптивные системы управления высокоточным электроприводом с минимизацией
среднеквадратичной ошибки.
8.8 Беспоисковые адаптивные системы управления электроприводами
8.9 Определение частотных и временных характеристик
8.10 Адаптивные наблюдающие устройства идентификации
8.11 Эталонные модели в беспоисковых адаптивных системах управления
8.12 Адаптивные системы управления со стабилизацией частотных и временных
характеристик
8.13 Адаптивные системы управления, построенные на сравнении высокочастотных и
низкочастотных составляющих сигналов
8.14 Адаптивные системы управления с наблюдающим устройством идентификации
8.15 Система электропривода с регулятором скорости переменной структуры
8.16 Электроприв
од постоянного тока с адаптивным регулятором тока
Глава 1 Основные функции и классификация систем управления
электроприводами
1.1 Классификация систем автоматического управления (СУЭП)
Современный автоматизированный электропривод (АЭП) – сложная система
автоматического управления (САУ), которая может входить в состав более сложной САУ.
Эти системы должны собирать информацию о ходе технологического процесса,
обработать ее на основании заданного алгоритма, вырабатывать и выдавать управляющие
воздействия на устройство, обеспечивающее целесообразный ход технологического
процесса.
Интенсификация технологического прогресса в различных отраслях промышленности
связана с усложняющейся технологией производства, с повышением требований к качеству
продукции при более сложных процессах технического изготовления, что привело к
большому количеству разнообразных систем управления электроприводами. В связи с этим
возникает необходимость их классификации, позволяющая более рациональное их изучение.
Системы управления различают по назначению: поддержания постоянства
регулируемой переменной, системы программного управления и следящие системы. Эта
классификация относится к замкнутым системам. Она не включает в себя простейших
систем и не учитывает систем, обеспечивающих оптимизацию, самонастройку и
комплексную автоматизацию.
Системы управления различают по роду аппаратуры: релейно-контакторные, с
электромашинными усилителями, с магнитными усилителями, с электронными и
полупроводниковыми преобразователями. Это не всегда удобно, т.к. современные системы,
имеющие аппаратуру, могут строиться по одинаковым принципам и будут меняться при
переходе от одного класса систем к другому.
Наиболее целесообразно группировать СУЭП по тем основным функциям, которые
они выполняют в производственном процессе. Требования производства к СУЭП могут быть
простыми для отдельных несложных технологически
х механизмов и довольно сложными
для технологических комплексов, выполняющих различные операции при обработке
материалов и деталей.
Требования производства лежат в основе функций, которые выполняются САУ.
Простые функции соответствуют простым требованиям, более сложные – более сложным
системам и функциям.
Группирование систем по основным функциям довольно сложно при изучении
систем управления, то классификация их по основным фу
нкциям является более
целесообразной и с методической точки зрения. В данном случае каждый класс системы
отличается от других классов структурной схемой, принципами действия, способами
построения, а также своими расчетами и типовыми схемами.
Кроме основных функций, выделяются дополнительные, каждая из которых вызывает
создание лишь дополнительных узлов в СУЭП.
Далее приводиться описание основных функций, на которые делятся СУЭП. Системы,
выполняющие сложные функции, могут выполнять и более простые. Однако необходимо
следить, чтобы более простым функциям на практике соответствовали и более простые
схемы СУЭП.
1.2 Основные функции СУЭП
Свойства всякой системы описываются ее связями с окружающей средой, ее
структурой, т.е. элементами системы и их взаимосвязями, а также работой системы.
На рисунке 1.1 показана связь СУЭП с окружающей средой и ее типовая структура.
Следовательно, электропривод - электромеханическое устройство, посредством
которого приводятся в движение рабочие органы машин, и обеспечивается управление
энергией, преобразованной из электрической в механическую.
Ручное управление осуществляется при помощи простейших коммутационных
аппаратов путем непосредственного воздействия на них оператора (человека).
Автоматическое управление происходит без непосредственного участия человека, который
может давать лишь первый командный импульс на выполнение определенного режима
привода и контролировать его. Но и первый командный импульс может подаваться для
отдельной машины также автоматическими устройствами.
Автоматическое управление ЭП – выполнение системой управления без
непосредственного участия оператора заданного режима работы в статических и
динамических условиях в соответствии с требованиями производственного процесса.
Совокупность технических средств, обеспечивающих автоматическое управление,
образуют автоматическое управляющее устройство (АУУ).
КО ФЧ ПУ
1
2
3
4
П М ТМ
ОУ
АУУ
У
ТМ
ЭЭ
Рисунок 1.1 – Схема электромеханической системы управления
В основной прямой части системы имеем: КО - командный орган; ФЧ –
функциональная часть (может включать электронный блок, в котором идёт обработка и
преобразование обратных связей); ПУ - промежуточный усилитель; М- электрическая
машина; П - преобразователь; ТМ - технологический механизм; 1 - главная обратная связь
(ОС), жёсткая; 2-4 - вспомогательные ОС, (гибкие); ЭЭ –электрическая энергия; ОУ - объект
управления.
ОУ, П, АУУ в своем взаимодействии можно рассматривать как электромеханическую
автоматическую систему управления ЭП, или СУЭП.
АУУ состоит из КО, подающего сигналы управления на задание или изменение
режима работы, ФЧ, которая преобразует командные сигналы, формируя требуемый закон
управления и выполняет основную функцию АУУ, ПУ, усиливающего сигнал управления до
требуемого значения управления преобразователем П. Преобразованная ЭЭ в силовом
преобразователе П поступает на электродвигатель М и далее в виде механической энергии
поступает по кинематическим связям на технологическую машину ТМ. Элементы структуры
охвачены обратными связями 1-4 для поддержания или изменения режима работы ТМ.
Режимы работы ЭП определяются величинами, характеризующими движение
рабочего органа технологической машины (или вала машины), т.е. скоростью, ускорением,
углом поворота, моментом, мощностью и т. д. Координата движения должна изменятся по
требуемому закону во времени или в функции другой величины, т.е. регулироваться. В
реальных СУЭП всегда существуют величины (возмущающее воздействие или возмущение),
отклоняющие регулируемую величину от требуемого закона её изменения. Основным
возмущением в СУЭП обычно является статический момент М
С
. К другим возмущениям
относятся колебание напряжение питающей сети; нестабильность характеристик элементов
системы (транзисторов в усилительном режиме); всевозможные помехи (по цепи ОС, по
силовой цепи).
Каждую СУЭП можно рассмотреть как систему, принимающую и перерабатывающую
информацию. В зависимости от количества используемых в СУЭП каналов информации и их
структуры различают 3 вида автоматического управления: по разомкнутому циклу, по
замкнутому циклу, по комбинированному циклу.
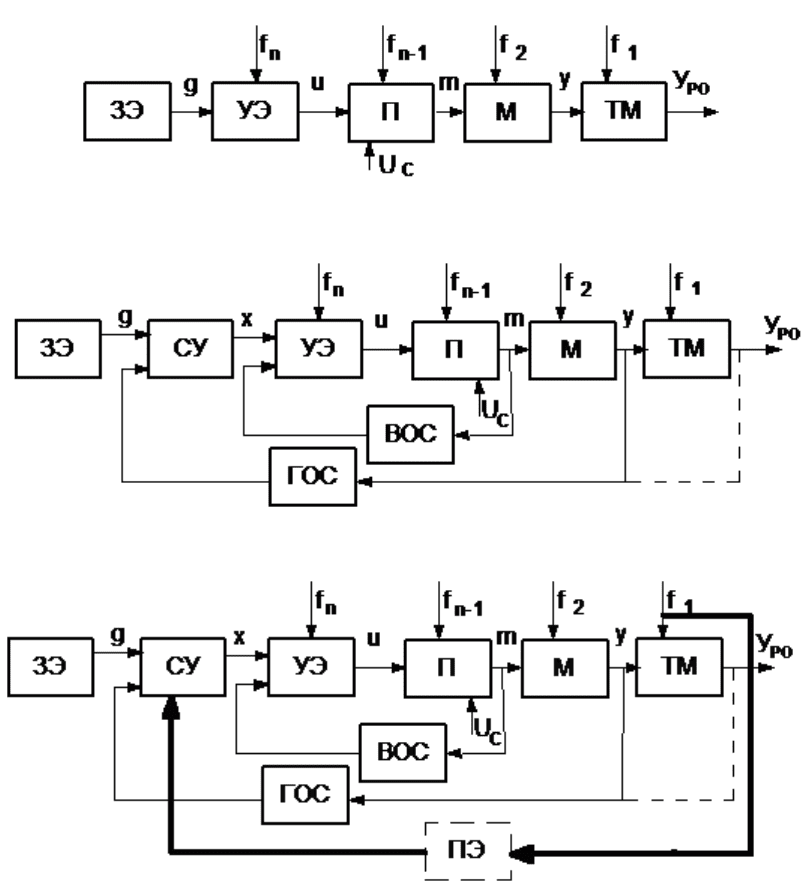
Рисунок 1.2 – Система, работающая по разомкнутому циклу
Рисунок 1.3 – Система, работающая по замкнутому циклу
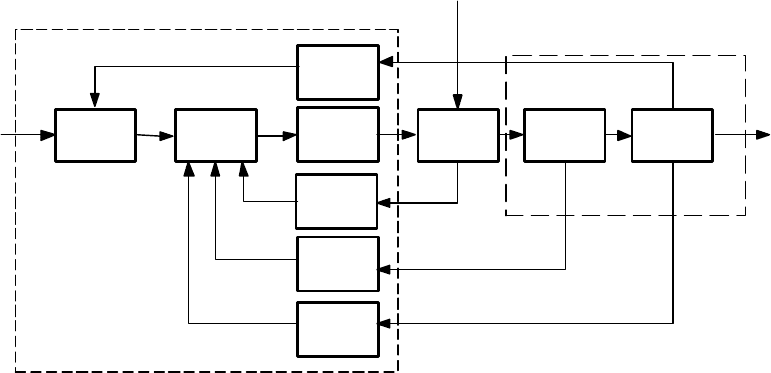
Рисунок 1.4 – Система, работающая по комбинированному циклу
На схемах (Рисунки 1.2-1.4) введены следующие обозначения: ПЭ –
преобразовательный элемент; U
C
- напряжение питающей сети; У - регулируемая величина;
m - регулирующее воздействие; g - сигнал задающей информации; f
1
-f
n
- возмущения; ЗЭ -
задающий элемент; СУ - суммирующее устройство; УЭ - управляющий элемент; П - силовой
преобразователь; М - электрическая машина; ГОС – главная ОС; ВОС – вспомогательная
ОС.
Для систем, работающих по разомкнутому циклу (Рисунок 1.2) характерно отсутствие
всякого измерения и контроля конечного значения регулируемой величины У.
Регулирующее воздействие от регулируемой величины не зависит. В этих системах
имеем только один канал информации - канал задания, точность выполнения заданного
режима невелика. Такая система используется для пуска и торможения двигателей,
регулирования скорости в небольших пределах.
В системах управления по замкнутому циклу (Рисунок 1.3) совместно используется
два канала информации:
• Канал задающей информации g(t);
• Канал информации о фактическом значении регулируемой величины y(t) –
обратная связь.
Задающая информация сравнивается с информацией обратной связи, определяется
ошибка управления
x(t)=g(t)-y(t)
и в зависимости от величины и знака этой ошибки по каналу управления
вырабатывается регулирующее воздействие m(t) на ЭП таким образом, чтобы свести ошибку
к нулю (или к допустимой величине), т.е. обеспечить изменение регулируемой величины по
требуемому закону. При этом ни одно из возмущений не измеряется, а их влияние на
регулируемую величину воспринимается системой управления по каналу обратной связи.
Такое управление называется управлением по ошибке, а обратную связь по регулируемой
величине – главной, отрицательной, жесткой обратной связью. Кроме главной обратной
связи в таких системах применяют вспомогательные обратные связи ВОС (местные, жесткие
и гибкие). Действие гибких обратных связей оказывает влияние только в переходных
процессах. Управляющие элементы и вспомогательные элементы СУЭП служат для
улучшения качества процесса управления (жесткие отрицательные ВОС ослабляют влияние
возмущающих воздействий на элементы, охватываемые ими). Если система имеет одну
главную ОС - одноконтурная, кроме главной ОС одну или несколько местных ОС, то она
многоконтурная.
Качество работы системы с ОС значительно выше, чем в разомкнутой системе и их
применяют:
• В глубоко регулируемых ЭП;
• При сложных изменениях задающего воздействия g(t);
• В приводах, согласованно работающих органов одного механизма или
нескольких различных механизмов;
• Когда требуется формирование оптимальных процессов пуска, торможения,
реверса.
Наиболее совершенными являются система, управления по комбинированному циклу
(Рисунок 1.4). Они объединяют разомкнутую и замкнутую системы. К основной замкнутой
структуре добавляется разомкнутая структура по каналу информации об основном
возмущающем воздействии f
1
(t).
В регулирующем воздействии m(t) постоянно присутствует составляющая, которая
компенсирует влияние возмущения f
1
(t), что позволяет обеспечить независимость
(инвариантность) регулируемой величины у(t) от основного возмущающего воздействия.
Разомкнутая структура реализует вид управления по возмущению. Влияние основных
возмущений ликвидирует основная замкнутая структура. СУЭП, имеющая главную ОС по
регулируемой величине называют замкнутыми. Иногда регулируемой величиной для ЭП
является выходная координата технологической машины ТМ – Yро (угловое перемещение
рабочего органа, температура и т.д.). В этом случае входная цепь главной ОС переносится на
выход ТМ (согласно пунктиру рисунки 1.3-1.4)
По виду сигналов информации и управления СУЭП делиться на непрерывные
(аналоговые) и дискретные (импульсные, цифровые, релейные системы). Системы могут
быть статическими(ΔX≠0) и астатическими(ΔX =0) по отношению к задающему или
возмущающему воздействию. Все системы, в зависимости от характера уравнений,
описывающих процессы управления, условно делятся на линейные (линеаризованные); и не
линейные.
СУЭП подразделяют иногда по виду силового преобразователя или основной
аппаратуры:
• Системы электромашинного управления или системы Г-Д, ЭМУ-Д;
• Системы тиристорный преобразователь – двигатель (ТП-Д);
• Системы дроссельного управления;
• Системы магнитный усилитель - двигатель (МУ-Д);
• Система преобразователь частоты – двигатель (ПЧ-Д);
• Системы релейно-контакторного управления;
• Системы «бесконтактного» управления.
В качестве базовой принята классификация СУЭП по видам управления,
определённым основным функциям систем:
1. Управление системами пуска, торможения и реверсирование ЭП;
2. Поддержание постоянства (стабилизация) заданной величины (скорости,
мощности, момента и др.) в статике и динамике;
3. Слежение за вводимыми в систему произвольно меняющихся входными
сигналами (следящее управление);
4. Отработка заданий программы (программное управление);
5. Выбор целесообразных режимов работы ЭП (адаптивное регулирование);
6. Автоматическое управление комплексами машин и механизмов, определённых
общим технологическим процессом.
Все СУЭП, выполняющие 1-4 основные функции, относятся к автоматическим
системам регулирования. Адаптивные СУЭП представляют собой кибернетические системы.
Система управления первой группы обеспечивают простейшие операции пуска,
остановки, реверсирования двигателя. Скорость двигателя после разгона не регулируется и
определяется естественной механической характеристикой и величиной момента нагрузки
Мс. В данном случае не предполагается применение специальных мер, обеспечивающих
формирование оптимального переходного процесса, так как в динамике возможны
произвольные колебания переменных в широких заданных пределах. Если от механизма
требуется изменение скоростей установившегося движения, то от электропривода требуется
в общем случае автоматический пуск двигателя на любую из заданных скоростей и переходы
с любой из заданных скоростей на любую другую. Предполагается, что каждая скорость
задается соответствующей механической характеристикой двигателя. Автоматические
устройства, выполняющие первую функцию довольно просты и допускают прерывистое
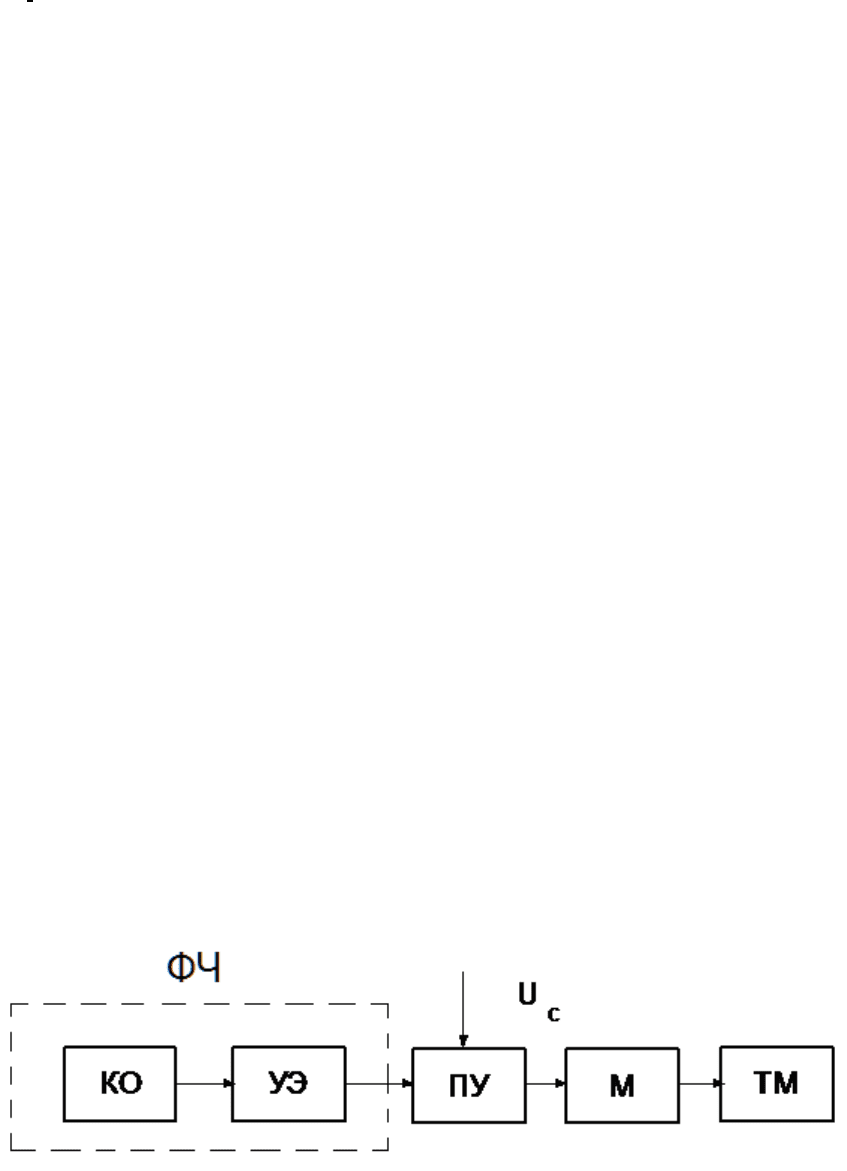
управление. Они имеют разомкнутую структуру и представлены на рисунке 1.5.
Рисунок 1.5 – Система управления, выполняющая первую функцию
Она имеет функциональную часть (ФЧ), переключающее устройство (ПУ)
выполняется со ступенчатым переключением резисторов, реакторов, обмоток и других
элементов. Применение находят в ЭП постоянного и переменного тока механизмов
металлообрабатывающей, металлургической и других отраслей промышленности.
Системы управления второй группы автоматически подают задающее воздействие и
поддерживают заданную скорость вращения или другую координату с высокой точностью в
статике и динамике (ток, скорость, мощность, момент, ускорение)
П М
ТМСУКО
U
c
ДС
U
з
U
у
М
c
U осс
Рисунок 1.6 – Система стабилизации заданной величины
Система управления является замкнутой и обеспечивает более высокую точность
поддержания постоянства заданной координаты, чем разомкнутая. Функциональная схема
представлена на рисунке 1.6 и состоит из командного органа КО, системы управления СУ,
силового преобразователя П и обратной связи по скорости ДС двигателя, сигнал которой
поступает на вход СУ, где происходит сравнение его с заданным:
Yy=Uзс-Uосс.
Сигнал задания определяет требуемое значение установившейся скорости. Так, при
увеличении силового возмущения Мс скорость ω уменьшится. При этом также уменьшится
сигнал обратной связи Uосс, возрастает разность сигналов Uзс-Uосс на входе СУ, что
приведет к увеличению управляющего сигнала Uу и напряжения Uп. После переходного
процесса установится новое значение скорости, несколько меньше прежнего, если СУЭП
статические и равная ему, если СУЭП астатические. В замкнутые СУЭП могут входить
различные аппараты управления (контактные и бесконтактные), силовые
преобразовательные устройства (ЭМУ, МУ, тиристорные преобразователи и др.).
Рассмотренные системы применяют при больших диапазонах регулирования, точном
поддержании скорости в ЭП подачи станков точного шлифования, поддержания постоянства
мощности резания, бумагоделательных машинах и др.
Системы управления третей группы осуществляют слежение за вводимыми в систему
сигналами и предназначены для приводов технологических машин (ТМ), которые требуют
слежения, т.е. при заданном движении входного вала, 2-й (выходной), вал повторял бы эти
движения с заданной точностью. Функциональная схема и характеристики входных и
выходных величин представлены на рисунке 1.7 и имеет замкнутую структуру с главной
отрицательной связью по углу поворота выходного вала. При помощи датчиков Д1 и Д2 в
систему управления поступают сигналы Uвх(t) и Uвых(t), разность между которыми (сигнал
ошибки) поступает на вход усилительного и формирующего элемента УЭ, который
вырабатывает сигнал управления Uуп(t) преобразователем П такого знака, чтобы двигатель
М, получающий сигнал от преобразователя, повернул свой вал в направлении, при котором
разность углов (Θвх - Θвых) уменьшилась. Данная СУЭП всегда стремиться обеспечить
согласованность угловых перемещений выходного и входного вала.
П М
ТМУЭД1
U
c
Д2
U
з
U
у
М
c
ВХ
ВЫХ
а)
б)
Рисунок 1.7 – Системы слежения. а – структурная схема; б – характеристики Θ=f(t)
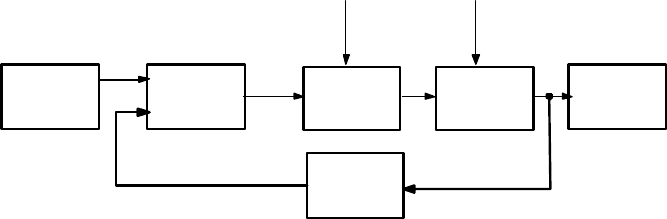
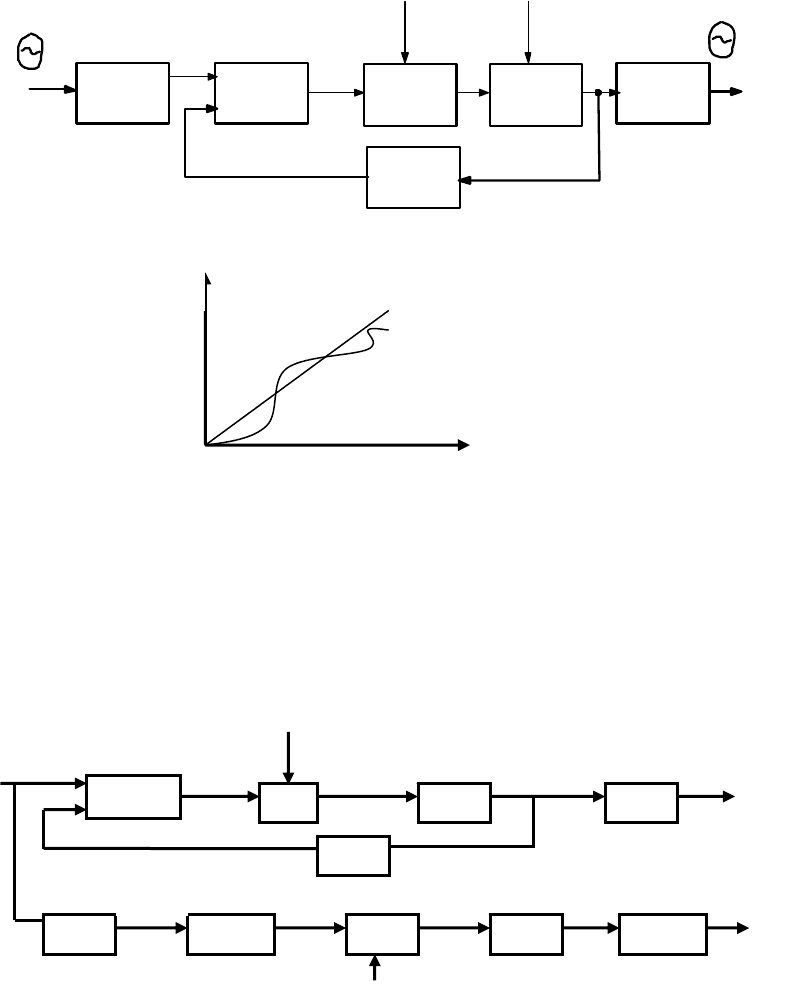
Системы управления четвертой группы осуществляют отработку заданной
программы, т.е. программное управление. Программные системы управления могут
включать в себя как замкнутые, так и разомкнутые СУЭП, но имеют общие
программирующие устройства (ПУ), показанное на рисунке 1.8
Рисунок 1.8 – Система программного управления
Схема сост
оит из 2-х систем: верхняя – замкнутая, нижняя – разомкнутая. ЭП с
двигателем М1 выполнен по замкнутой СУ, поддерживающей постоянным задаваемое
сигналом Uз
1 значение скорости ωро1 (рабочего органа1). ЭП с двигателем М2 имеет
разомкнутую систему управления и обеспечивает изменение вращения вала Росо скоростью
ωро2 Программа формируется программным устройством различными способами.
Системы управления пятой группы обеспечивают выбор целесообразных режимов
работы ЭП – адаптивное управление.
θвх
t
θ
θвых
УЭ1
П
М1
РО1
ДС
ПУ
УЭ2
П2
М2
РО2
Uc
W
р
о
W
р
о
Uз1
Uз2
Uc