Klir G.J. Uncertainity and Information. Foundations of Generalized Information Theory
Подождите немного. Документ загружается.

All the values are listed in Table 6.3b. Our new frame of discernment X is now
{c, d}. Since X π ⭋ and Bel(X) > 0, we repeat the process. The maximum of
Bel(A)/|A| is now reached at {c}. We put p
c
= 0.28, change Bel({d}) to 0.13, and
X to {d}.In the last pass through the loop we get p
d
= 0.13.We can conclude that
6.6.2. Computing the Aggregated Uncertainty in Possibility Theory
Due to the nested structure of possibilistic bodies of evidence, the computa-
tion of functional AU can be substantially simplified. It is thus useful to refor-
mulate Algorithm 6.1 in terms of possibility profiles for applications in
possibility theory. The following is the reformulated algorithm.
Algorithm 6.2. Calculating AU from a given possibility profile.
Input. n Œ ⺞, r =·r
1
, r
2
,...,r
n
Ò.
Output. AU(Pos), ·p
i
|i Œ ⺞
n
Ò such that AU(Pos) =-S
n
i=1
p
i
log
2
p
i
, with p
i
≥ 0 for
i Œ ⺞
n
, S
n
i=1
p
i
= 1, and S
xŒA
p
x
£ Pos(A) for all ⭋ π A Ã X.
Step 1. Let j = 1 and r
n+1
= 0.
Step 2. Find maximal i Π{j, j + 1,...,n} such that (r
j
- r
i+1
)/(i + 1 - j) is
maximal.
Step 3. For k Π{j, j + 1,...,i}, put p
k
= (r
j
- r
i+1
)/(i + 1 - j).
AU Bel p p
ii
iabcd
()
=-
=- ¥ - -
Œ
{}
Â
log
. log . . log . . log .
..
,,,
2
222
2 0 295 0 295 0 28 0 28 0 13 0 13
19⬟
232 6. MEASURES OF UNCERTAINTY AND INFORMATION
A Bel(A)
{a} 0.26 0.26
{b} 0.26 0.26
{c} 0.26 0.26
{a, b} 0.59 0.295
{a, c} 0.53 0.65
{a, d} 0.27 0.135
{b, c} 0.53 0.265
{b, d} 0.27 0.135
{c, d} 0.27 0.135
{a, b, c} 0.87 0.29
{a, b, d} 0.61 0.203
¯
{a, c, d} 0.55 0.183
¯
{b, c, d} 0.55 0.183
¯
{a, b, c, d} 1 0.25
(a)
Bel A
A
()
A Bel(A)
{c} 0.28 0.28
{d} 0.02 0.02
{c, d} 0.41 0.205
(b)
Bel A
A
()
Table 6.3. Calculation of AU by Algorithm 6.1 in Example 6.10: (a) First Iteration;
(b) Second Iteration

Step 4. Put j = i + 1.
Step 5. If i < n, then go to Step 2.
Step 6. Calculate AU(Pos) =-S
n
i=1
p
i
log
2
p
i
.
As already mentioned, it is sufficient to consider only all unions of focal
elements of a given belief function, in this case a necessity measure. Since all
focal elements of a necessity measure are nested, the union of a set of focal
elements is the largest focal element (in the sense of inclusion) in the set.
Therefore, we have to examine the values of Nec(A)/|A| only for A being a
focal element.
We show by induction on the number of passes through the loop of Steps
1–5 of Algorithm 6.1 that the following properties hold in a given pass:
(a) The “current” frame of discernment X is the set {x
j
, x
j+1
,...,x
n
}, where
the value of j is taken in the corresponding pass through the loop of
Steps 2–5 of Algorithm 6.2.
(b) All focal elements are of the form A
i
= {x
j
, x
j+1
,...,x
i
} for some i Π{j,
j + 1,...,n}, where j has the same meaning as in (a).
(c) Nec(A
i
) = r
j
- r
i+1
, where j is again as described in (a).
This implies that Algorithm 6.2 is a correct modification of Algorithm 6.1 for
the case of possibility theory.
In the first pass, j = 1, X = {x
1
, x
2
,...,x
n
}; (b) holds due to our ordering con-
vention regarding possibility profiles. Since r
1
= 1, we have
So (c) is true.
Let us now assume that (a)–(c) were true in some fixed pass. We want to
show that (a)–(c) hold in the next pass. Let l denote the value of i maximiz-
ing Nec(A
i
)/|A
i
|=Nec(A
j
)/(i + 1 - j). Now X becomes X - A
l
= {x
l+1
, x
l+2
,...,
x
n
}. Therefore (a) holds, since j = l + 1 and Nec(A
i
) becomes
for i Π{j, j + 1,...,n}. This implies that (b) and (c) hold.
Nec A Nec A A Nec A
Pos
A
A Pos
A
rr
rr
rr
ilil
li l
ki
n
j
kl
n
j
li
ji
()
=»
()
-
()
=- -
()
[]
--
()
[]
=-
{}
È
Î
Í
˘
˚
˙
--
{}
È
Î
Í
˘
˚
˙
=-
=-
=+ =+
++
+
11
11
11
11
1
max max
Nec A Pos
A
r
r
i
i
ki
n
j
i
()
=-
()
=-
{}
=-
=+
+
1
1
1
1
1
max
.
6.6. AGGREGATE UNCERTAINTY IN DEMPSTER–SHAFER THEORY 233
EXAMPLE 6.11. Consider X = {1,2,...,8} and the possibility profile
The relevant values of (r
j
- r
i+1
)/(i + 1 - j) are listed in Table 6.4.
We can see there that in the first pass the maximum is reached at i = 3, and
p
1
= p
2
= p
3
=
1
–
6
. In the second pass, the maximum is reached at both i = 7 and
i = 8. We take the bigger one and put p
4
= p
5
= p
6
= p
7
= p
8
= 0.1. We finish by
computing
6.7. AGGREGATE UNCERTAINTY FOR CONVEX SETS OF
PROBABILITY DISTRIBUTIONS
Once the aggregated measure of uncertainty AU has been established in DST,
it is fairly easy to generalize it for convex sets of probability distributions. Let
this generalized version of AU be denoted by S
¯
to emphasize its definition in
terms of the maximum Shannon entropy. Clearly, S
¯
is a functional defined on
the family of convex sets of probability distribution functions. Given a convex
set D of probability distribution functions p, S
¯
is defined by the formula
(6.61)
Spxpx
p
xX
D
D
()
=-
() ()
Ï
Ì
Ó
¸
˝
˛
Œ
Œ
Â
max log .
2
AU Pos p p
ii
i
()
=- = +
=
=
Â
log log log
..
2
1
8
22
3
6
6
5
10
10
295
p = 1 09 085 05 05 035 03 01,.,. ,.,.,. ,.,..
234 6. MEASURES OF UNCERTAINTY AND INFORMATION
Table 6.4. Illustration of the Use of Algorithm 6.2 in
Example 6.11
Pass 1 2
i/j 14
1 0.1
2 0.075
3 0.16
¯
4 0.125 0
5 0.13 0.075
6 0.116
¯
0.06
¯
7 0.1286 0.1
8 0.125 0.1
rr
ij
ji
-+
+-
1
1
It is essential to show that S
¯
satisfies the following requirements, which are
appropriate generalizations of their counterparts for AU:
(S
¯
1) Probability Consistency. When D contains only one probability dis-
tribution, S
¯
assumes the form of the Shannon entropy.
(S
¯
2) Set Consistency. When D consists of the set of all possible probabil-
ity distributions on A 債 X, then
(S
¯
3) Range. The range of S
¯
is [0, log
2
|X|] provided that uncertainty is mea-
sured in bits.
(S
¯
4) Subadditivity. If D is an arbitrary convex set of probability distribu-
tions on X ¥ Y and D
X
and D
Y
are the associated sets of marginal
probability distributions on X and Y, respectively, then
(S
¯
5) Additivity. If D is the set of joint probability distributions on X ¥ Y
that is associated with independent marginal sets of probability distri-
butions, D
X
and D
Y
, which means that D is the convex hull of the set
It is obvious that the functional S
¯
defined by Eq. (6.61) satisfies require-
ments (S
¯
1)–(S
¯
3). The remaining two properties, subadditivity and additivity,
are addressed by the following two theorems.
Theorem 6.10. Functional S
¯
defined by Eq. (6.61) satisfies the requirement
(S
¯
4), that is, it is subadditive.
Proof. Given a convex set of joint probability distributions on X ¥ Y, let p
.
denote the joint probability distribution in D for which the maximum in Eq.
(6.61) is obtained and let p
.
X
and p
.
Y
denote the marginal probability distribu-
tions of p
.
. Then, by Gibbs’ inequality (Eq. 3.28),
䊏
Spxypxy
px y p x p y
px y p x px y p y
xXyY
XY
xXyY
X
xX
Y
xXyYyY
˙
˙
, log
˙
,
˙
, log
˙˙
˙
, log
˙˙
, log
˙
˙
p
()
=-
() ()
£-
() ()
◊
()
[]
=-
() ()
-
() ()
=-
ŒŒ
ŒŒ
ŒŒŒŒ
ÂÂ
ÂÂ
ÂÂÂÂ
2
2
22
ppx px py py
SS
XX
xX
YY
yY
XY
() ()
-
() ()
£
()
+
()
ŒŒ
ÂÂ
log
˙˙
log
˙
˙˙
.
22
pp
DD D D
DD D
XY X Y X XY Y
XY
px y p x p y x X y Y p P
SS S
ƒ=
()
=
()
◊
()
ŒŒ Œ Œ
{}
()
=
()
+
()
,,,,,
.then
SS S
XY
DD D
()
£
()
+
()
.
SAD
()
= log .
2
6.7. AGGREGATE UNCERTAINTY FOR CONVEX SETS OF PROBABILITY DISTRIBUTIONS 235
Theorem 6.11. Functional S
¯
defined by Eq. (6.61) satisfies the requirement
(S
¯
5), that is, it is additive.
Proof. From Theorem 6.10
It is thus sufficient to show that
under the assumption of independence. Let p
.
X
and p
.
Y
denote the marginal
probability distributions on X and Y for which the maxima in Eq. (6.61) are
obtained. Then
䊏
EXAMPLE 6.12. Consider the following convex sets of marginal probability
distributions on X = {x
1
, x
2
} and Y = {y
1
, y
2
}:
The maximum entropy within D
X
is obtained for l
X
= 1 (i.e., for p
X
(x
1
) = 0.4
and p
X
(x
2
) = 0.6). The maximum entropy within D
Y
is obtained for l
Y
= 1 (i.e.,
for p
Y
(y
1
) = 0.2 and p
Y
(y
2
) = 0.8). Hence,
Assuming the independence of the marginal probabilities, the set D of the
associated joint probabilities on Z = X ¥ Y is the convex hull of the set
where z
i,j
=·x
i
, y
j
Ò for all i, j = 1, 2. The maximum entropy within D
X
ƒ D
Y
is
obtained for l
X
= l
Y
= 1 and, hence,
DD
XY X Y
XY
XY
X
pz
pz
pz
pz
ƒ=
()
=+
()
+
()
{
()
=+
()
-
()
()
=-
()
+
()
()
=-
()
-
11
12
21
22
02 02 01 01
02 02 09 01
08 02 01 01
08 02 09 0
.. ..,
.. ..,
.. ..,
.. ..
ll
ll
ll
l 1101lll
YXY
()
Œ
[]
}
,,,
SS
SS
SS
X
Y
XY
D
D
DD
()
=
()
=
()
=
()
=
()
+
()
=
04 06 0971
02 08 0722
1 693
., . . ,
., . . ,
..
D
D
XX XX XX
YY XY YY
px px
py py
=
()
=+
()
=- Œ
[]
{}
=
()
=+
()
=- Œ
[]
{}
12
12
02 02 08 02 0 1
01 01 09 01 0 1
.., .. ,,
.., .. ,.
lll
lll
S S px px py py
px py px py
S
XY X X
xX
YY
yY
XY Xy
xXyY
DD
D
()
+
()
=-
() ()
-
() ()
=-
()
◊
() ()
◊
()
[]
£
()
ŒŒ
ŒŒ
ÂÂ
ÂÂ
˙
log
˙˙
log
˙
˙˙
log
˙˙
.
22
2
SS S
XY
DD D
()
≥
()
+
()
SS S
XY
DD D
()
£
()
+
()
.
236 6. MEASURES OF UNCERTAINTY AND INFORMATION
Functional S
¯
is defined in this section for convex sets of probability distri-
butions. However, it can be as well defined for the lower and upper probabil-
ity functions or the Möbius representations obtained uniquely from convex
sets of probability distributions. We can thus write not only S
¯
(D), but also
S
¯
(),S
¯
(m
¯
), or S
¯
(m).
Algorithm 6.1 (introduced in Section 6.6.1) is formulated and proved
correct for belief functions. It is not necessarily applicable to lower probabil-
ities that are more general or incomparable with belief functions. A lower
probability for which the algorithm does not work is examined in the follow-
ing example.
EXAMPLE 6.13. Consider the following convex set D of probability distri-
butions on Z = {z
11
, z
12
, z
21
, z
22
} defined in Example 6.7. The lower probability
function,
D
, associated with this set, which is derived by Eq. (4.11), is shown
in Table 6.2. Recall that
D
is not 2-monotone in this example.
Applying Algorithm 6.1 results in probability distribution
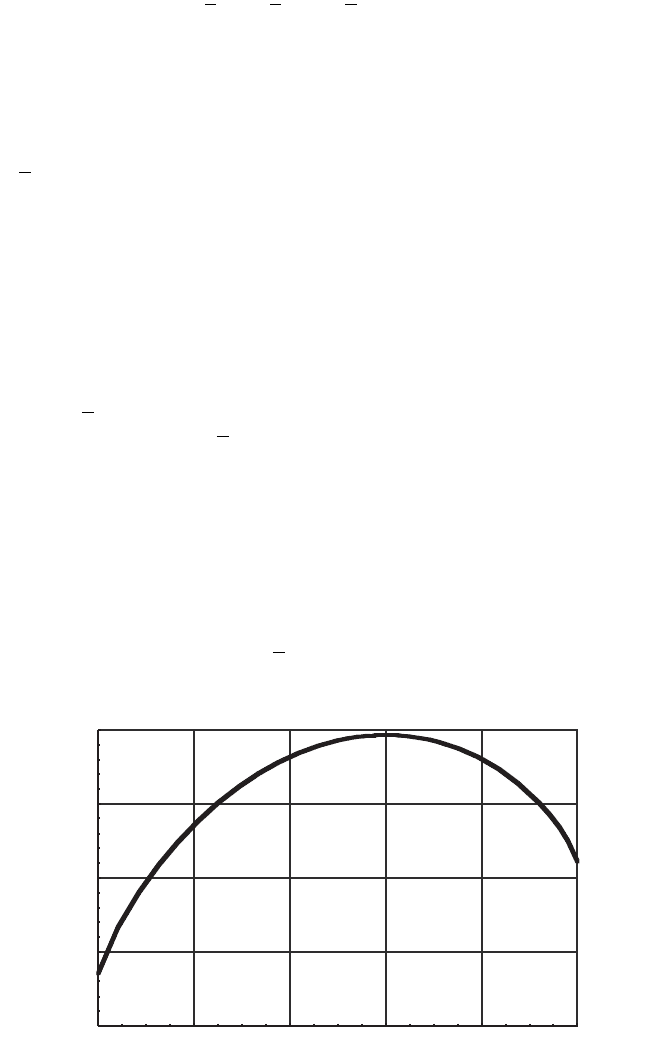
for which S(0.4, 0.4, 0.1, 0.1) = 1.722. However, this probability distribution is
not a member of the given set of probability distributions. The plot of the
Shannon entropy for l Π[0, 1] is shown in Figure 6.8. Its maximum is = 1.69288.
It is obtained for p =·0.48, 0.32, 0.12, 0.08Ò. Algorithm 6.1 thus does not
produce the correct value of S
¯
( ) in this example.
m
pz pz pz pz
11 12 21 22
04 01
()
=
()
=
()
=
()
=., .,
m
m
m
SS S
XY
DD D
()
=
()
+
()
= 1 693..
6.7. AGGREGATE UNCERTAINTY FOR CONVEX SETS OF PROBABILITY DISTRIBUTIONS 237
0.2 0.4 0.6 0.8 1
l
1.4
1.5
1.6
1.7
S
Figure 6.8. Values of the Shannon entropy for l Π[0, 1] in Example 6.13.
6.8. DISAGGREGATED TOTAL UNCERTAINTY
Functional S
¯
defined by Eq. (6.60) is certainly well justified on mathematical
grounds as an aggregate measure of uncertainty in the theory based on arbi-
trary convex sets of probability distributions and, consequently, to the various
special theories of uncertainty as well. However, it has a severe practical short-
coming: it is highly insensitive to changes in evidence. To illustrate this unde-
sirable feature of S
¯
, let us examine the following example.
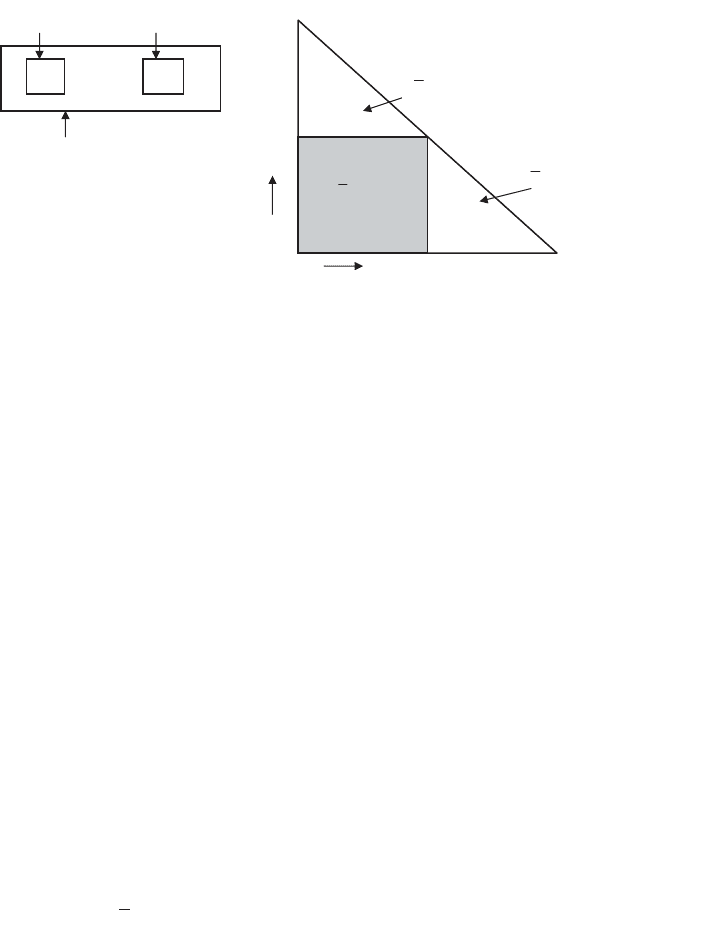
EXAMPLE 6.14. Consider the following class of simple bodies of evidence
in DST: X = {x
1
, x
2
}, m({x
1
}) = m
1
, m({x
2
}) = m
1
, m(X) = 1 - m
1
- m
2
, where m
1
,
m
2
Π[0, 1] and m
1
+ m
2
£ 1 (Figure 6.9a). Clearly, Bel({x
1
}) = m
1
, Bel({x
2
}) =
m
2
, and Bel(X) = 1. Then, S
¯
(Bel) = 1 (or AU(Bel) = 1 when using the special
notation in DST) for all m
1
Π[0, 0.5] and m
2
Π[0, 0.5]. Moreover, when m
1
>
0.5, S
¯
(Bel) = S(m
1
,1 - m
1
), where S denotes the Shannon entropy. Hence,
S
¯
(Bel) is independent of m
2
. Similarly, when m
2
> 0.5, S
¯
(Bel) = S(m
2
,1 - m
2
)
and, hence, S
¯
(Bel) is independent of m
1
. These values of S
¯
(Bel) are shown in
Figure 6.9b. The functional S
¯
in this example can also be expressed by the
formula
(6.62)
for all m
1
, m
2
Π[0, 1] such that m
1
+ m
2
£ 1, where S denotes the Shannon
entropy.
This example surely illustrates that the insensitivity of the functional S
¯
to
changes in evidence is very severe. This feature makes the functional ill-suited
for measuring uncertainty on conceptual and pragmatic grounds. However,
S Bel S m m m m
()
=
{}
-
{}()
max , , . , max , , .
12 12
05 1 05
238 6. MEASURES OF UNCERTAINTY AND INFORMATION
1
m
2
m
)1,()(
11
mmSmS -=
)1,()(
22
mmSmS -=
0.5
0.5
0
1
1
1
x
2
x
1
m
2
m
21
1
mm --
(a)
(b)
1)(
=mS
Figure 6.9. Illustration of the severe insensitivity of the aggregate uncertainty measure
(Example 6.14).

recognizing that S
¯
is an aggregate of the two types of uncertainty—nonspeci-
ficity and conflict—it must be that
(6.63)
where is a lower probability function, which can be derived from any of the
other representations of the same uncertainty (the associated convex set of
probability distributions, Möbius representation, or upper probability func-
tion) or may be converted to any of these representations as needed. In Eq.
(6.63) GH is the well-justified functional for measuring nonspecificity (defined
at the most general level by Eq. (6.38) and referred to as the generalized
Hartley measure) and GS is an unknown functional for measuring conflict
(referred to as the generalized Shannon entropy).
Since functionals S
¯
and GH in Eq. (6.63) are well justified and GS is an
unknown functional, it is suggestive to define GS from the equation as
(6.64)
Here, GS is defined indirectly, in terms of two well-justified functionals, thus
overcoming the unsuccessful attempts to define it directly (as discussed in
Section 6.5).
Functional S
¯
, which is well justified but practically useless due to its insen-
sitivity, can now be disaggregated into two components, GH and GS, which
measure two types of uncertainty that coexist in all uncertainty theories except
the classical ones. A disaggregated total uncertainty, TU, is thus defined as the
pair
(6.65)
where GH and GS are defined by Eqs. (6.38) and (6.64), respectively. Since
the sum of the two components of TU is S
¯
, TU is as well justified as S
¯
. One
advantage of the disaggregated total uncertainty, TU, in comparison with its
aggregated counterpart S
¯
, is that it expresses amounts of both types of uncer-
tainty (nonspecificity and conflict) explicitly, and consequently, it is highly sen-
sitive to changes in evidence.
Another advantage of TU is that its components, GH and GS, need not
satisfy all the mathematical requirements for measures of uncertainty. It
only matters that their aggregate measure, S
¯
, satisfies them. The lack of
subadditivity of GH for arbitrary convex sets of probability distributions,
established in Example 6.7, is thus of no consequence when GH is employed
as one component in TU.
EXAMPLE 6.15. To appreciate the difference between S
¯
and TU, let us
consider the following three bodies of evidence on X and let |X|=n for
convenience:
TU GH GS= ,,
GS S GHmm m
()
=
()
-
()
.
m
SGHGSmmm
()
=
()
+
()
,
6.8. DISAGGREGATED TOTAL UNCERTAINTY 239

(a) In the case of total ignorance (when m(X) = 1), S
¯
(m) = log
2
n and TU(m)
=·log
2
n,0Ò.
(b) When evidence is expressed by the uniform probability distribution
on X (i.e., m({x}) = 1/n for all x ΠX), then again S
¯
(m) = log
2
n, but
TU(m) =·0, log
2
nÒ.
(c) When evidence is expressed by m({x}) = a for all x ΠX, where a < 1/n,
and m(X) = 1 - na, then again S
¯
(m) = log
2
n, while TU(m) =·(1 -
na)log
2
n, nalog
2
nÒ.
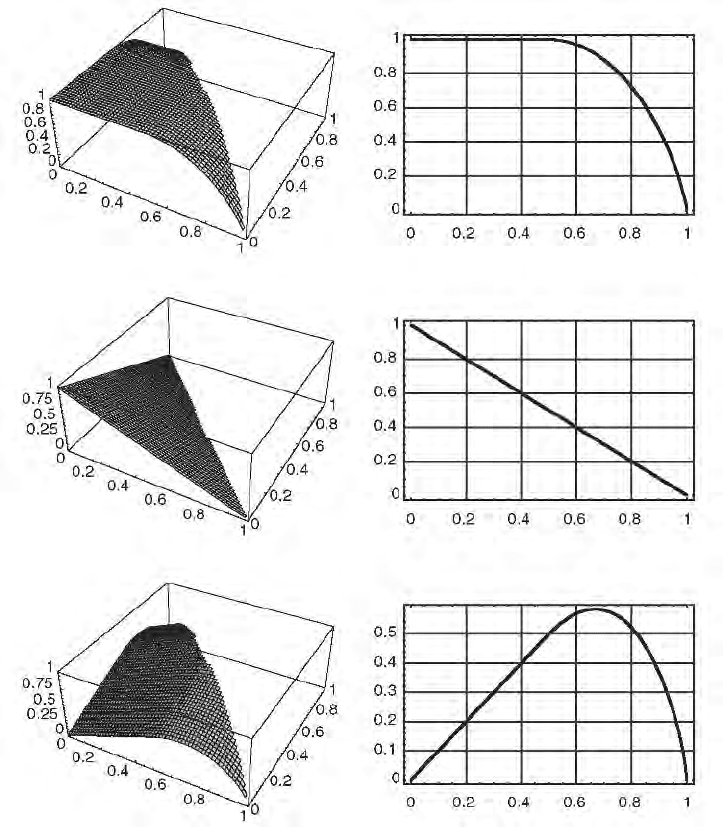
EXAMPLE 6.16. To illustrate the disaggregated total uncertainty TU =·GH,
GSÒ, let us consider again the class of simple bodies of evidence introduced in
Example 6.14. Plots of the dependences of S
¯
, GH, and GS on m
1
and m
2
are
shown in the first column of Figure 6.10. We can see that both components of
TU (GH and GS) are sensitive to changes of evidence. Plots of S
¯
, GH, and GS
for the extreme cases when either m
2
= 0 or m
1
= 0 (nested or possibilistic
bodies of evidence) are shown in the second column of Figure 6.10. It is easy
to determine that the maximum of GS is 0.585, and it is attained in these cases
for m
1
= 2/3 and m
2
= 0 (or m
1
= 0 and m
2
= 2/3).
The plots in Figure 6.10 are based on the lower probability function, when
m
1
+ m
2
£ 1. Similar plots can be made for the upper probability function, when
m
1
+ m
2
≥ 1. In Figure 6.11, values of S
¯
(m
1
, m
2
), GH(m
1
, m
2
), GS(m
1
, m
2
) are
shown for all values of m
1
, m
2
Π[0, 1]. Clearly,
where S denotes the Shannon entropy, and
To fully justify the disaggregated total uncertainty TU defined by Eq.(6.65),
it remains to prove that its second component, the generalized Shannon
entropy GS defined by Eq. (6.64) is always nonnegative. That is, we need to
prove that the inequality
holds for any lower probability function (or any of its equivalent represen-
tations). This proof is presented for belief functions in Appendix D. A proof
for lower probability functions outside DST is still needed.
m
SGHmm
()
-
()
≥ 0
GH m m
mm mm
mm mm
GS m m S m m GH m m
12
12 12
12 12
12 12 12
11
11
,
,, ,,
()
=
-- +£
+- +≥
{
()
=
()
-
()
when
when
Sm m
Smm
mm m m
Smm
mm mm
12
12
12 1 2
12
12 12
05
105 1
11 05
11105 1
,
max , , . ,
max , , .
max , , . ,
max , , . ,
()
=
{}(
-
{})
+£
--
{}(
---
{})
+≥
Ï
Ì
Ô
Ó
Ô
when
when
240 6. MEASURES OF UNCERTAINTY AND INFORMATION
6.9. GENERALIZED SHANNON ENTROPY
The generalized Shannon entropy defined by Eq. (6.64) emerged fairly
recently and has not been sufficiently investigated as yet. Nevertheless, some
of its properties in Dempster–Shafer theory are derived in this section on the
basis of Algorithm 6.1.
6.9. GENERALIZED SHANNON ENTROPY 241
Figure 6.10. Uncertainties for the two-element bodies of evidence defined in Example 6.14.
First column: S
¯
, GH, and GS for all m
1
and m
2
such that m
1
+ m
2
£ 1; second column: S
¯
, GH,
and GS for either m
1
= 0 or m
2
= 0.