Казаринов Л.С., Попова О.В., Барбасова Т.А. Автоматизированные информационно-управляющие системы (часть 2)
Подождите немного. Документ загружается.

сервер получать данные не напрямую, а извлекать их из своего внутреннего буфера (кэша).
Разумеется, если сервер не делает кэширования, он может эту "просьбу" проигнорировать.
Организация данных
Переменные в ОРС-сервере могут быть упорядочены либо в простой список, либо в
дерево, напоминающее дерево файлов на диске (только вместо термина "папка" в ОРС говорят
"ветвь"). Можно, в частности, в любой момент запросить дерево переменных, поддерживаемых
ОРС-сервером. Если оборудование допускает, дерево может изменяться динамически. Впрочем,
если быть до конца точными, интерфейс, необходимый для просмотра дерева, объявлен в ОРС-
спецификации как необязательный. Тем не менее, он настолько удобен, что практически все ОРС-
серверы его реализуют.
Есть механизм оповещения завершения работы ОРС-сервера. Есть возможность запросить
информацию о самом сервере. Есть возможность запросить список зарегистрированных групп. В
общем, есть много того, что старались предусмотреть разработчики ОРС- спецификаций, чтобы
облегчить организацию взаимодействия поставщика данных (ОРС- сервера) и потребителя данных
(ОРС-клиента).
Инструментарий
Как уже было сказано, чтобы написать ОРС-сервер или ОРС-клиент, нужно только
взаимодействие с ОРС Foundation (ОРС-спецификации) и Microsoft (Visual C++ и пр.). Но...
Проблемы
Есть очень много сложных вопросов, которые придётся решить при программировании
ОРС-интерфейсов. Во-первых, само программирование СОМ не такое уж примитивное, даже с
применением ATL. Во-вторых, сами ОРС-объекты и их ОРС-интерфейсы достаточно сложны и
громоздки.
И, в-третьих, есть вопросы системного уровня, которыми нужно владеть. Очень
схематично: фабрики класса, заглушки и заместители, апартаменты, асинхронный обмен,
многозадачность, синхронизация, память. Кстати, последний вопрос весьма актуальный, так как в
СОМ допускается (и сплошь и рядом в ОРС используется) выделение памяти в сервере, а удаление
её возлагается на клиент. Малейшая неточность, и пойдут трудно устранимые утечки памяти. А,
учитывая, что ОРС-сервер обычно должен работать стационарно, рано или поздно крах системы
неизбежен.
Toolkit
Всего этого избежать можно, если воспользоваться так называемыми Toolkit'aMH. Есть
достаточно много фирм, которые реализацию ОРС-спецификаций избрало своим бизнесом.
Они в той или иной степени уже "наступили на все грабли" и предлагают средства, позволяющие
более-менее безопасно и легко создавать ОРС -продукцию.
Типичный Toolkit представляет собой библиотеку, реализующую ОРС-объекты выбранной
спецификации, что реализует все прихоти со стороны ОРС. Разработчику же, например, ОРС-
сервера предлагается некий набор вызовов, достаточно простых (read, write, ...), которые
необходимо "подцепить" к своему оборудованию для доступа к его данным. Для знающих
объектное программирование заметим, что эти функции могут быть реализованы как виртуальные
функции некоторого класса, которые нужно перегрузить в своём приложении. Так сделаны,
например, Toolkit'bi фирмы FactorySoft (http://www.factoryfoft.com).
ОРС и интеграция
Перечислим несколько детальнее, где может "найти себе работу" ОРС-сервер.
ОРС поверх драйвера
Если имеется оборудование, например плата АЦП, управляемая через драйвер на
компьютере с Windows или другой ОС, поддерживающей COM/DCOM, то это самый главный
кандидат на то, чтобы непосредственно поверх драйвера был реализован ОРС-сервер.
Замена устройства не потребует изменения остальных приложений: драйвер изменился, но
ОРС-интерфейс поверх него остался прежний.
ОРС через сеть
Имеется устройство, управляемое через какой-нибудь сетевой протокол. В этом случае
вполне типична реализация ОРС-сервера, получающего данные по этому протоколу. Единственная
особенность в этом случае - предусмотреть механизмы восстановления связи в случае сбоев.
ОРС для ОС
Несколько более сложная схема, когда некоторые управляющие приложения работают на
компьютере, где не поддерживается COM/DC0M. В этом случае возможна реализация
141
двухкомпонентного ОРС-сервера. На стороне ОС, не поддерживающей СОМ, устанавливается
сетевой модуль, который с одной стороны связан с приложением(ями), а с другой стороны связан
через сеть с ОРС-сервером. Заметим, что сетевой модуль может быть стандартным, как, например,
ISaNet в системе ISaGRAF. Тогда необходимо разрабатывать только ОРС-сервер. По такому
принципу создан, например, ОРС-сервер ISaGRAF от фирмы "РТСофт" (www.rtsoft.ru). Другая
разновидность - сетевой модуль создаётся специально для ОРС-сервера. Возможна даже
реализация, когда этот модуль не ориентирован на конкретное приложение, а предоставляет
некоторый API-интерфейс для любых приложений, желающих обслуживаться с помощью ОРС.
Пример такого решения - ОРС-сервер для операционной системы 0S-9, разработанный в компании
"РТСофт" (www.rtsoft.ru).
ОРС для fieldbus
Ещё одна разновидность ОРС-сервера - шлюз к сети полевой шины, такой как Profibus или
Lonworks. С точки зрения реализации это очень похоже на предыдущие случаи. Скорее всего, на
компьютере с ОС Windows будет установлен адаптер fieldbus-сети, а ОРС-сервер будет работать с
этой сетью через драйвер адаптера. В Internet можно найти немало таких примеров.
Идея такой схемы достаточно очевидна. Сеть полевой шины работает в жёстком реальном
времени, а ОРС предоставляет менее требовательный шлюз к этой сети из приложений более
высокого уровня.
И другие применения ОРС
Можно придумать много других применений ОРС. Например, ОРС для работы с базами
данных, вспомогательные ОРС-серверы, промежуточные и т.д. Возможности для фантазии
неограниченны. Одну такую фантазию хотелось бы привести.
Технология DCOM, как уже говорилось, не работает в глобальных сетях. Поэтому для
привлечения к ОРС-технологии Internet-технологий можно набросать такой путь. Расширение
web-сервера является ОРС-клиентом, собирающим данные от ОРС-серверов. А на стороне
клиентов запускается динамическая html- или xml-страница, получающая данные от этого web-
сервера. Её можно сделать даже ОРС-сервером для других приложений.
Полезность применения ОРС с точки зрения интеграции достаточно прозрачна и вытекает
из самой сути ОРС. Это стандарт на интерфейс обмена данными с оборудованием. Первый момент
- если вы заменяете какой-нибудь компонент, то нет нужды корректировать другое программное
обеспечение, так как даже при замене драйвера поверх него работает ОРС. Второй момент - если
вы хотите добавить в систему новые программы, нет необходимости предусматривать в них
драйверы устройств, кроме ОРС-клиента, разумеется. Ну и так далее.
Состояние
Идеальной выглядела бы следующая картина. Все в мире признают ОРС своим
стандартом. При этом все поставщики оборудования, включая полевые шины, снабжают свои
продукты ОРС-серверами. Все поставщики программ для систем управления делают свои
продукты ОРС-клиентами, а во многих случаях делают их ещё и ОРС-серверами. При этом и те, и
другие реализуют все спецификации и поддерживают интерфейсы ОРС. А все производители
операционных систем поддерживают в своих ОС технологии COM/DCOM, а также предоставляют
сервисный инструментарий, как для него, так и для ОРС. И при этом все это всё делают на
высоком профессиональном уровне и очень грамотно рассказывают сборщикам систем, как это
всё собирать и конфигурировать. Вот тогда вопрос обмена данными в системах автоматизации
можно было бы считать закрытым.
В настоящее время полностью завершённой являются только спецификация DA ОРС.
Другие спецификации ещё дорабатываются, по крайней мере, с точки зрения интерфейса
Автоматизации (для Batch ОРС доступна бета-версия интерфейса Автоматизации, для остальных
спецификаций нет ещё даже бета-версий).
В настоящее время по настоящему широкое распространение получил только стандарт DA
ОРС. Можно сказать, что сейчас действительно очень многие производители снабжают свои
продукты DA ОРС-серверами. Чего нельзя сказать о других спецификациях.
Программы высокого уровня
Здесь картина аналогична предыдущей. Спросом пользуется лишь DA ОРС. Все известные
нам SCADA-продукты являются ОРС-клиентами. Например, Wonderware InTouch, CiTect (Ci
Technologies). Многие SCADA-продукты являются также ОРС-серверами. Например, Citect.
Другое ПО подвержено влиянию ОРС в гораздо меньшей степени.
Операционные системы
142
В настоящее время технологию COM/DCOM поддерживает следующие операционные
системы: все Windows, начиная с Windows 95. Это обеспечивается самой компанией Microsoft;
большинство Unix-подобных ОС, включая Linux; поддерживается фирмой GE Software;
ОС реального времени VxWorks; обеспечивается фирмой-разработчиком WindRiver;
имеется поддержка ОРС, встроенная в систему разработки Tornado.
В других операционных системах, насколько нам известно, поддержки COM/DCOM нет.
Это не очень отрадный факт, поскольку разработчиков систем автоматизации в первую очередь
интересуют ОС реального времени.
Перспективы
Ещё довольно много оборудования и ПО "не охвачено" ОРС-технологиями. Даже
технологией DA. Но нам представляется, что сейчас в мире налицо некий бум ОРС, по крайней
мере, в отношении, опять же, DA. Думается также, что Microsoft рано или поздно доведёт всё до
желаемого уровня по всем направлениям. Тем более что альтернативы пока нет. Мы имеем в виду
не COM/DCOM, а именно спецификации на обмен технологическими данными. Поскольку для
COM/DCOM альтернатива как раз имеется - CORBA. Это действительно изначально
платформенно независимая технология взаимодействия приложений. Но это не обмен
технологическими данными, реализующий более высокий уровнем абстракции. Кстати, заметим,
что на рынке имеются ОРС-шлюзы к CORBA (это возможно, как и к любому другому протоколу,
о чём говорилось выше).
Технология ОРС предлагает стандарты для обмена технологическими данными, в которые
заложены самые широкие возможности. Учитывая большой авторитет вовлечённых в эту
деятельность фирм, включая саму Microsoft, можно ожидать, что технология ОРС будет набирать
силу. И это перспективная технология для использования её в интеграции разнородных систем.
Хотя процесс становления ещё далеко не завершён и есть много проблем, которые пре
143
Приложение 2.
Нейронные сети
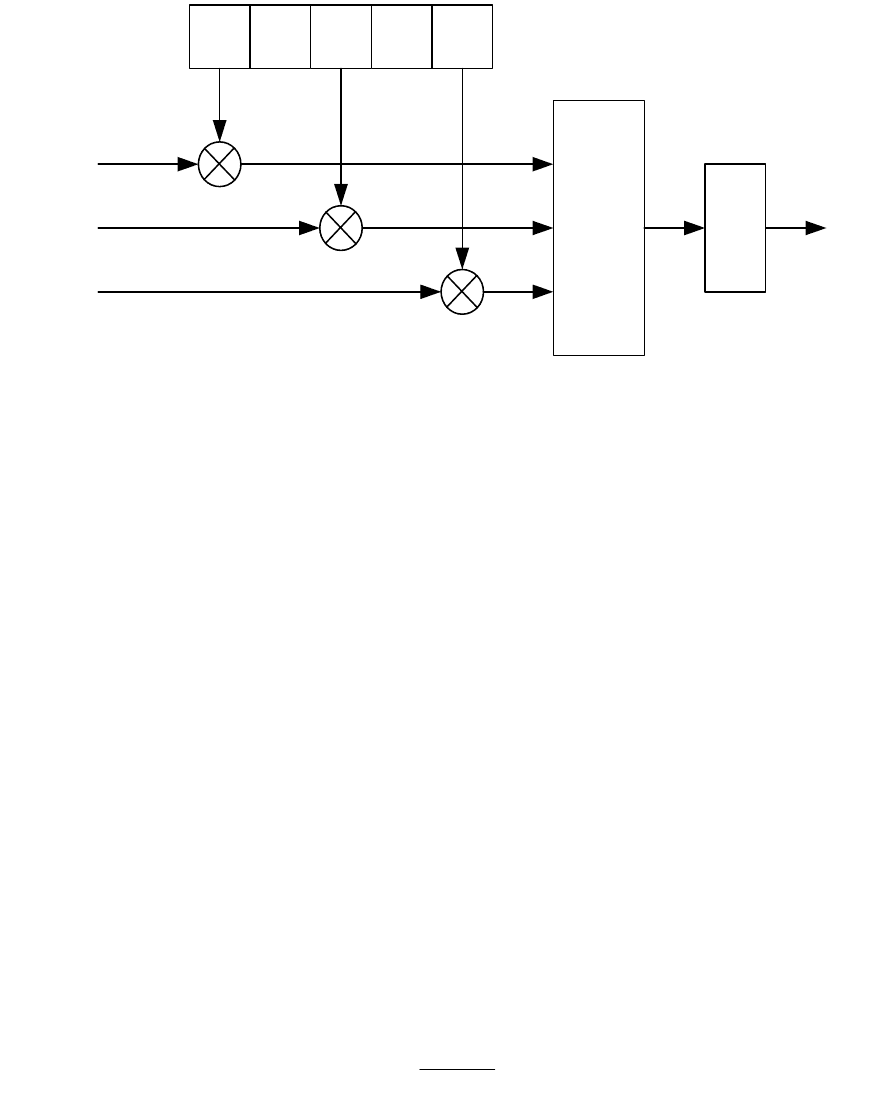
Нейрон является составной частью нейронной сети. На рис. 1 показана его структура.
w
1
w
i
w
n
... ...
x
1
x
i
x
n
f
s y
Рис. 1
Нейрон состоит из элементов трех типов: умножителей (синапсов), сумматора и
нелинейного преобразователя. Синапсы осуществляют связь между нейронами, умножают
входной сигнал на число, характеризующее силу связи, (вес синапса). Сумматор выполняет
сложение сигналов, поступающих по синаптическим связям от других нейронов, и внешних
входных сигналов. Нелинейный преобразователь реализует нелинейную функцию одного
аргумента – выхода сумматора. Эта функция называется функцией активации или передаточной
функцией нейрона. Нейрон в целом реализует скалярную функцию векторного аргумента.
Математическая модель нейрона:
bxws
n
i
ii
1
,
)(sfy
,
где
i
w
- вес синапса, i = 1…n; b – значение смещения, s – результат суммирования,
i
x
–
компонент входного вектора (входной сигнал), y – выходной сигнал нейрона, n – число входов
нейрона, f - нелинейное преобразование (функция активации).
В общем случае входной сигнал, весовые коэффициенты и смещение могут принимать
действительные значения, а во многих практических задачах — лишь некоторые фиксированные
значения. Выход (у) определяется видом функции активации и может быть как действительным,
так и целым.
На входной сигнал (s) нелинейный преобразователь отвечает выходным сигналом f(s),
который представляет собой выход у. Одной из наиболее распространенных является нелинейная
функция активации с насыщением, так называемая логистическая функция или сигмоид (функция
S-образного вида):
as
e
sf
1
1
)(
.
Нейронная сеть представляет собой совокупность подобных элементов, определенным
образом соединенных друг с другом и внешней средой с помощью связей, определяемых
весовыми коэффициентами. В зависимости от функций, выполняемых нейронами в сети, можно
выделить три их типа:
входные нейроны, на которые подается вектор, кодирующий входное воздействие или образ
внешней среды; в них обычно не осуществляется вычислительных процедур, а информация
передается с входа на выход путем изменения их активации;
выходные нейроны, выходные значения которых представляют выходы нейронной сети;
144

промежуточные нейроны, составляющие основу нейронных сетей.
С точки зрения топологии можно выделить три основных типа нейронных сетей:
полносвязные — (рис. 2, а);
многослойные или слоистые (рис. 2, б);
слабосвязные (с локальными связями) (рис. 2, в).
а) б) в)
Рис. 2
В полносвязных нейронных сетях каждый нейрон передает свой выходной сигнал
остальным нейронам, в том числе и самому себе. Все входные сигналы подаются всем нейронам.
Выходными сигналами сети могут быть все или некоторые выходные сигналы нейронов после
нескольких тактов функционирования сети.
В многослойных нейронных сетях нейроны объединяются в слои. Слой содержит
совокупность нейронов с едиными входными сигналами. Число нейронов в слое может быть
любым и не зависит от количества нейронов в других слоях. В общем случае сеть состоит из Q
слоев, пронумерованных слева направо. Внешние входные сигналы подаются на входы нейронов
входного слоя (его часто нумеруют как нулевой), а выходами сети являются выходные сигналы
последнего слоя. Кроме входного и выходного слоев в многослойной нейронной сети есть один
или несколько скрытых слоев. Связи от выходов нейронов некоторого слоя q к входам нейронов
следующего слоя (q+1) называются последовательными.
В слабосвязных нейронных сетях нейроны располагаются в узлах прямоугольной или
гексагональной решетки. Каждый нейрон связан со своими ближайшими соседями.
Известные нейронные сети можно разделить по типам структур нейронов на гомогенные
(из нейронов одного типа с единой функцией активации) и гетерогенные (нейроны с различными
функциями активации).
Существуют бинарные и аналоговые сети. Первые из них оперируют только двоичными
сигналами, и выход каждого нейрон может принимать значение либо логического ноля, либо
логической единицы.
Выбор структуры нейронной сети осуществляется в соответствии с особенностями и
сложностью задачи. При этом необходимо руководствоваться следующими основными
правилами:
возможности сети возрастают с увеличением числа нейронов сети, плотности связей между
ними и числом слоев;
введение обратных связей наряду с увеличением возможностей сети поднимает вопрос о
динамической устойчивости сети;
сложность алгоритмов функционирования сети, введение нескольких типов синапсов
способствует усилению мощности нейронной сети.
Для решения отдельных типов задач существуют шаблоны (оптимальные конфигурации).
Очевидно, что процесс функционирования нейронной сети, действия, которые она
способна выполнять, зависит от синаптических связей. Поэтому, задавшись определенной сетью,
соответствующей какой-либо задаче, необходимо подобрать оптимальные значения всех
переменных весовых коэффициентов. Этот этап называется обучением нейронной сети, и от того,
насколько качественно он будет выполнен, зависит способность сети решать поставленные перед
ней проблемы во время функционирования.
145

В процессе функционирования нейронная сеть формирует сигнал Y в соответствии с
входным сигналом X, реализуя некоторую функцию g(X). Если архитектура сети задана, то вид
функции g определяется значениями синаптических весов и смещений сети. Обозначим через G
множество всех возможных функций g. Пусть E — функция ошибки (функционал качества),
показывающая для каждой из функций степень близости решению r (для которого
)(
KK
XrY
,
K
X
и
K
Y
— обучающая выборка.
Таким образом, решить поставленную задачу с помощью нейронной сети заданной
архитектуры — это значит построить (синтезировать) функцию
Gg
, подобрав веса и смещения
таким образом, чтобы функционал качества обращался в оптимум для всех пар (
K
X
и
K
Y
).
Обучение состоит в поиске (синтезе) функции g, оптимальной по Е. Оно требует
длительных вычислений и представляет собой итерационную процедуру. Число итераций может
составлять от 10
3
до 10
8
. На каждой итерации происходит уменьшение функции ошибки.
Если выбраны множество обучающих примеров и способ вычисления функции ошибки,
обучение нейронной сети превращается в задачу многомерной оптимизации, для решения которой
могут быть использованы следующие методы:
локальной оптимизации с вычислением частных производных первого порядка;
локальной оптимизации с вычислением частных производных первого и второго порядка;
стохастической оптимизации;
глобальной оптимизации.
Задачи, решаемые искусственными нейронными сетями:
Распознавание образов. К известным приложениям относятся распознавание букв,
распознавание речи, классификация сигнала электрокардиограммы, классификация клеток
крови.
Кластеризация/категоризация. Алгоритм кластеризации основан на подобии образов и
размещает близкие образы в один кластер. Известны случаи применения кластеризации для
извлечения знаний, сжатия данных и исследования свойств данных.
Аппроксимация функций. Предположим, что имеется обучающая выборка, которая
генерируется неизвестной функцией, искаженной шумом. Задача аппроксимации состоит в
нахождении оценки этой функции.
Предсказание/прогноз. Задача состоит в предсказании значения в будущий момент времени.
Оптимизация. Задачей оптимизации является нахождение решения, которое удовлетворяет
системе ограничений и максимизирует или минимизирует целевую функцию.
Управление. В системах управления с эталонной моделью целью управления является расчет
такого входного воздействия, при котором система следует по желаемой траектории,
диктуемой эталонной моделью.
146
Приложение 3.
Метод Группового Учета Аргументов
Метод Группового Учета Аргументов (МГУА) применяется в самых различных областях
для анализа данных и отыскания знаний, прогнозирования и моделирования систем, оптимизации
и распознавания образов. Индуктивные алгоритмы МГУА дают уникальную возможность
автоматически находить взаимозависимости в данных, выбрать оптимальную структуру модели
или сети, и увеличить точность существующих алгоритмов.
Этот подход самоорганизации моделей принципиально отличается от обычно
используемых дедуктивных методов. Он основан на индуктивных принципах — нахождение
лучшего решения основано на переборе всевозможных вариантов.
При помощи перебора различных решений подход индуктивного моделирования пытается
минимизировать роль предпосылок автора о результатах моделирования. Компьютер сам находит
структуру модели и законы, действующие в объекте. Он может быть использован при создании
искусственного интеллекта как советчик для разрешения споров и при принятии решений.
Метод Группового Учета Аргументов состоит из нескольких алгоритмов для решения разных
задач. В него входят как параметрические, так и алгоритмы кластеризации, комплексирования
аналогов, ребинаризации и вероятностные алгоритмы. Этот подход самоорганизации основан на
переборе постепенно усложняющихся моделей и выборе наилучшего решения согласно минимуму
внешнего критерия. В качестве базисных моделей используются не только полиномы, но и также
нелинейные, вероятностные функции или кластеризации.
Направление МГУА может быть полезным по нижеперечисленным причинам:
1. Находится оптимальная сложность структуры модели, адекватная уровню помех в выборке
данных. (Для решения реальных проблем с зашумленными или короткими данными, упрощенные
прогнозирующие модели оказываются более точными.)
2. Количество слоев и нейронов в скрытых слоях, структура модели и другие оптимальные
параметры нейросетей находятся автоматически.
3. Гарантируется нахождение наиболее точной или несмещенной модели - метод не
пропускает наилучшего решения во время перебора всех вариантов (в заданном классе функций).
4. Любые нелинейные функции или признаки, которые могут иметь влияние на выходную
переменную, используются как входные аргументы.
5. Автоматически находит интерпретируемые взаимосвязи в данных и выбирает
эффективные входные переменные.
6. Переборные алгоритмы МГУА довольно просто запрограммировать.
7. Метод использует информацию непосредственно из выборки данных и минимизирует
влияние априорных предположений автора о результатах моделирования.
8. Подход МГУА используется для повышения точности других алгоритмов моделирования.
9. Дает возможность отыскания несмещенной физической модели объекта (закона или
кластеризации) – одной и той же для всех будущих выборок.
С 1968 года много исследований и применений МГУА было проведено во многих странах. Он
был внедрен во многих программных продуктах.
147