Казаринов Л.С., Попова О.В., Барбасова Т.А. Автоматизированные информационно-управляющие системы (часть 1)
Подождите немного. Документ загружается.


3.3. Программное обеспечение секвенциально-логического
управления
В АСУ ТП большой удельный вес занимают последовательные
логические алгоритмы управления действиями. Логические алгоритмы
традиционно реализовывались на основе разных технологий – до середины
1970-х годов большинство схем строилось на базе электромеханических реле
или пневматических элементов, в 11970-е годы получили широкое
распространение программируемые логические контроллеры, и сегодня
последовательностное управление реализуется почти исключительно
программными средствами. Несмотря на изменение в технологии,
символическое изображение операций переключения с помощью
принципиальных схем, которой восходит к ранней релейной технике, до сих
пор используется для описания и документирования операций
последовательностного управления, в том числе и реализуемого
программно. Другой важный тип языка, который можно использовать не
только для описания, но и как инструмент документирования, - это
функциональные карты. Для реализации последовательностных логических
алгоритмов промышленность выпускает специальные программируемые
контроллеры PLC.
3.3.1. Программируемые логические контроллеры
Назначение и функции
Программируемые логические контроллеры (ПЛК, programmable logic
controller - PLC) - это специальные микрокомпьютеры, предназначенные для
выполнения операций переключения в промышленных условиях. Это
название, в действительности, не верно, так как ПЛК сегодня могут гораздо
больше, чем просто выполнять логические операции. Однако эта
аббревиатура сохранена. ПЛК генерируют выходные сигнала
«включить/выключить» для управления исполнительными механизмами –
электродвигателями, клапанами, лампочками и т.п., которые являются
неотъемлемой частью систем автоматизации во всех отраслях
промышленности.
Основные операции ПЛК соответствуют комбинационному управлению
логическим схемами. Кроме того, современные ПЛК могут выполнять
другие операции, например, функции счетчика или и интервального таймера,
обрабатывать задержку сигналов и т.д. Основное преимущество ПЛК
заключается в том, что одиночная компактная схема может заменить сотни
реле. Другое преимущество – функции ПЛК реализуются программно, а не
аппаратно, поэтому его поведение можно изменить с минимальными
усилиями. С другой стороны, ПЛК могут быть медленнее, чем реальная
аппаратная логика. Оптимальное решение для каждого конкретного
приложения можно получить, применяя обе технологии в одной системе так,
чтобы использовать преимущества для каждой из них.
121

Первые ПЛК были сконструированы только для простых
последовательностных операций с двоичными сигналами. Сегодня на рынке
существуют сотни различных моделей ПЛК, которые отличаются не только
размером памяти и числом каналов ввода-вывода (от нескольких десятков до
нескольких сотен), ни и выполняемыми функциями. Небольшие ПЛК
предназначены в основном для замены реле и имеют некоторые аналоговые
сигналы, производят математические операции и даже содержат контур
управления обратной связи, как ПИД регуляторы.
Конструктивно ПЛК обычно приспособлены для работы в типовых
промышленных условиях, с учетом уровней сигналов, термо- и
влагостойкости, ненадежности источников питания, механических ударов и
вибраций. ПЛК так же содержат специальные интерфейсы для согласования
и предварительной обработки различных типов и уровней сигналов.
Функции ПЛК чаще при меняются в устройствах ввода-вывода, входящих в
состав больших интегрированных систем управления.
ПЛК можно программировать различными способами – с помощью
ассемблероподобных команд, проблемно-ориентированных языков высокого
уровня или прямым описанием операций последовательного управления с
помощью функциональных карт. В Европе наиболее популярно
использование функциональных блоков с графическими символами
логических элементов, а в США до сих пор достаточно широко
распространены принципиальные схемы. Однако два последних метода
постепенно заменяются BASIC-подобными языками программирования.
Основные команды
В системах промышленной автоматики ПЛК должны работать в режиме
реального времени, т.е. быстро реагировать на внешние события. Ввод и
обработка внешних сигналов осуществляется в ПЛК двумя способами – по
опросу или по прерыванию. Основной недостаток опроса – можно потерять
некоторые внешние события, если ПЛК не обладает достаточным
быстродействием, хотя такой подход проще для программирования.
Управление по прерываниям сложнее для программирования, но риск
пропустить какое-либо внешнее событие намного меньше. Управления по
опросу вполне достаточно для простых схем, а управление по прерыванию
используется в сложных случаях.
Программирование ПЛК в основном представляет собой описание
управляющих последовательностей. Функции ввода/вывода уже
реализованы в базовом программном обеспечении ПЛК. Программные
инструкции, задаваемые одним из описанных выше способов,
транслируются в машинный код ПЛК. Выполнение программы происходит в
бесконечном цикле.
Скорость реакции ПЛК, очевидно, зависит от продолжительности цикла,
а поскольку во время исполнения программы процессор ПЛК не может
считывать и выдавать какие-либо новые сигналы. Обычно это не очень
серьезная проблема, так как большинство сигналов в промышленной
122
автоматике изменяются сравнительно медленно либо имеют относительно
большую продолжительность.
Небольшого набора базовых машинных команд, как правило, достаточно
для большинства задач последовательного управления. Программа,
состоящая из этих команд, называется списком команд (instruction list).
Некоторые основные команды перечислены ниже; обычно они могут
оперировать как битами, так и байтами.
ld, ldi – загрузка значения из входного порта в сумматор, непосредственно
(ld) или с инверсией (ldi);
and, ani – операция AND или NAND между значениями в сумматоре и на
входном порту; результат сохраняется в сумматоре;
or, ori – операция OR или NOR между значениями в сумматоре и на
выходном порту; результат сохраняется в сумматоре;
out – содержимое сумматора копируется в конкретный выходной порт и
управляет выходными сигналами; значение в сумматоре не изменяется,
поэтому его можно подвергнуть дальнейшей обработке или переслать в
другой выходной порт.
Дополнительные команды ПЛК
Базовый набор команд ПЛК может включать логические операции XOR,
NAND, NOR и др. Кроме того, современные ПЛК имеют операторы для
обработки буквенно-цифровых данных и связи с внешними устройствами, а
также дополнительные функции в виде счетчиков, таймеров и генераторов
импульсов. Импульсные сигналы можно, например, использовать для
обнуления внешнего счетчика. С помощью модулей задержки входные и
выходные сигналы можно сдвинуть во времени. Более сложные ПЛК могут
генерировать прямоугольные и пилообразные импульсы, а так же содержать
алгоритмы фильтрации сигналов и управления с обратной связью.
Программирование ПЛК
ПЛК обычно программируются с помощью внешних устройств –
программаторов. Как правило, эти устройства не нужны для
непосредственной работы ПЛК. Программаторы – это либо ручные
специализированные устройства, либо обычные портативные персональные
компьютеры.
Ручной программатор ПЛК выглядит как большой карманный
калькулятор с простым дисплеем. Каждый логический элемент
принципиальной схемы или программный оператор вводится специальными
клавишами или их комбинацией.
Более мощный и набирающий популярность вид программатора ПЛК –
это персональный компьютер с графическим дисплеем. Для облегчения
отладки и тестирования на экране иногда показывают ток, протекающий по
каждой линии при выполнении операции, чтобы сразу был виден эффект
влияния входа на выход. В некоторых случаях можно программировать,
рисуя на дисплее схемы из функциональных блоков, каждый из которых
123
вводится комбинацией клавиш и/или выбирается мышью из заранее
сформированной таблицы.
В последнее время все чаще применяются языки высокого уровня, потому
что сложные функции, например, обработку аналоговых сигналов или
специальные алгоритмы регулирования, нельзя удовлетворительно описать с
помощью ограниченного числа заранее определенных символов. Поддержка
программирования ПЛК на языке высокого уровня становится обязательным
условием по мере возрастания сложности операций.
Новый стандарт IEC 1131-3, ранее называвшийся IEC 65А(SEC)67,
определяет пять типов языковых средств программирования ПЛК:
- список команд (instruction list - IL) текстовый язык низкого уровня.
Выглядит как типичный язык Ассемблера, что объясняется его
происхождением: для некоторых моделей ПЛК фирмы Siemens является
языком Ассемблера. В рамках стандарта IEC 1131-3 к архитектуре
конкретного процессора не привязан. Самостоятельного значения не имеет:
используется только совместно с SFC. Происхождение - STEP 5 (Siemens);
- функциональная блок-схема, т.н. схема на основе функциональных
блоков (function bloсk diagram - FBD) - графический язык по своей сути
похожий на LD. Вместо реле в этом языке используются функциональные
блоки, по внешнему виду - микросхемы. Алгоритм работы некоторого
устройства на этом языке выглядит как функциональна схема электронного
устройства: элементы типа "логическое И", "логическое ИЛИ" и т.п.,
соединенные линиями. Корни языка выяснить сложно, однако большинство
специалистов сходятся во мнении, что это не что иное как перенос идей
языка релейно-контактных схем на другую элементную базу;
- принципиальная схема(ladder diagram - LD) - графический язык
программирования, являющийс стандартизованным вариантом класса
языков релейно-контактных схем. Логические выражения на этом языке
описываются в виде реле, которые широко применялись в области
автоматизации в 60-х годах. Ввиду своих ограниченных возможностей язык
дополнен привнесенными средствами: таймерами, счетчиками и т.п.
Происхождение: различные варианты языка релейно-контактных схем
(Allen-Bradley, AEG Schneider Automation, GE-Fanuc, Siemens);
- функциональная карта (sequential function chart - SFC) - графический
язык, используемый для описания алгоритма в виде набора связанных пар:
шаг (step) и переход (transition). Шаг представляет собой набор операций над
переменными. Переход - набор логических условных выражений,
определяющий передачу управления к следующей паре шаг-переход. По
внешнему виду описание на языке SFC напоминает хорошо известные
логические блок-схемы алгоритмов. SFC имеет возможность
распараллеливания алгоритма. Однако, SFC не имеет средств для описания
шагов и переходов, которые могут быть выражены только средствами
других языков стандарта;
124
- язык типа «структурированный текст» (structured text) с синтаксисом,
подобным языку программирования Pascal. Самостоятельного значения не
имеет: используется только совместно с SFC.
Таким образом, международный стандарт IEC 1131-3 гарантирует
широкий спектр возможностей для программирования ПЛК.
3.3.2. Языки программирования ПЛК
В настоящее время PLC программируются двумя языками
программирования:
1. Стандартная релейная логика RLL (Realay Ladder Logic);
2. Логика RRL PLUS - способ программирования при помощи блок –
схем.
Стандартная релейная логика RLL (Realay Ladder Logic)
Стандартная релейная логика RLL (Realay Ladder Logic) - язык
программирования эмулирующий работу релейных схем. Этот язык
программирования знаком специалистам старой закалки, что позволяет им
легко адаптироваться к новой технике. Недостаток этого языка заключается
в громоздкости больших программ, что часто портит жизнь начинающим
программистам и молодым специалистам. Рассмотрим более подробно
основные элементы релейной логики и ее применение для реализации
пошагового управления.
Принципиальные схемы
На сегодняшний день большинство логических схем построено на
полупроводниковых элементах. Хотя электромеханические реле
продолжают применяться, их доля постепенно уменьшается, так как они
заменяются электронной логикой. Это, однако, не означает, что
электромеханические реле теряют свое значение, поскольку они фактически
остаются незаменимым интерфейсом между управляющей электроникой и
исполнительными механизмами.
Релейные цепи обычно изображаются в виде монтажных схем (wiring
diagrams) на которых показываются источник питания и физические
размещение различных компонентов схемы (выключатели, реле, двигателем
и т.д.), а также их соединения. Эти схемы используются техниками при
монтаже панелей управления.
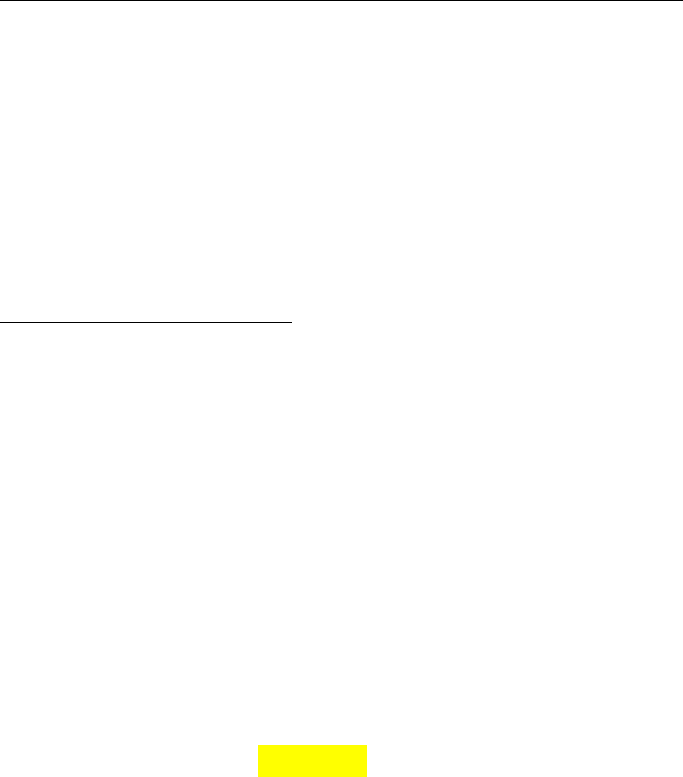
Широко распространено изображение логических цепей в виде
принципиальных схем (рис. 3.11) принципиальная схема (ladder diagram) –
это упрощенный вариант обычной монтажной схемы без явного указания
всех электрических связей. На принципиальной схеме каждая ветвь
управляющей цепи показана отдельным горизонтальным радом, «ступенькой
лестницы» (английское название происходит от ladder - лестница) и
отражает одну конкретную функцию и соответствующую ей
последовательность операций. В принятой системе обозначений косвенно
125
подразумевается, что одна вертикальная линия присоединяется к источнику
питания, а другая заземлена.
Рис. 3.11. Структура принципиальной схемы
Принципиальные схема очень популярны при описании комбинационных
и последовательностных сетей.
На принципиальной схеме показываются контактные реле, которые могут
быть нормально замкнуты или нормально разомкнуты (нормальным
состоянием считается то, при котором в катушке не течет ток). Выходное
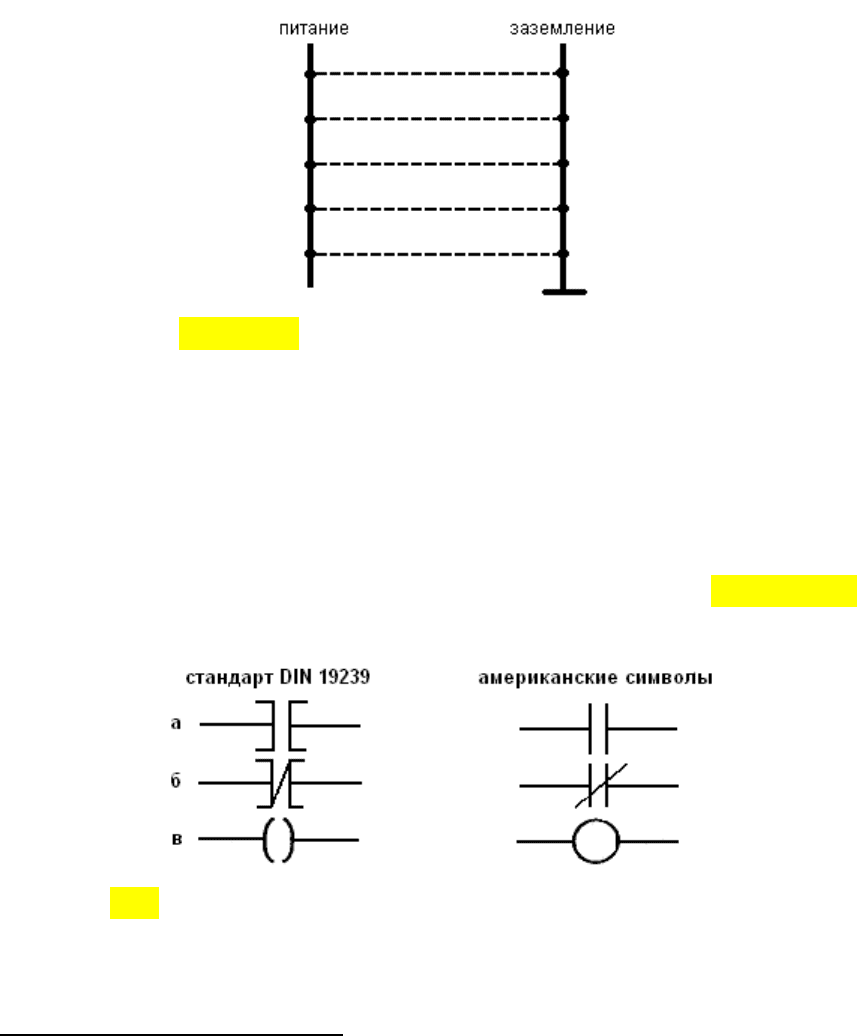
реле (катушка) может обозначать более сложную цепь или триггер. Символы
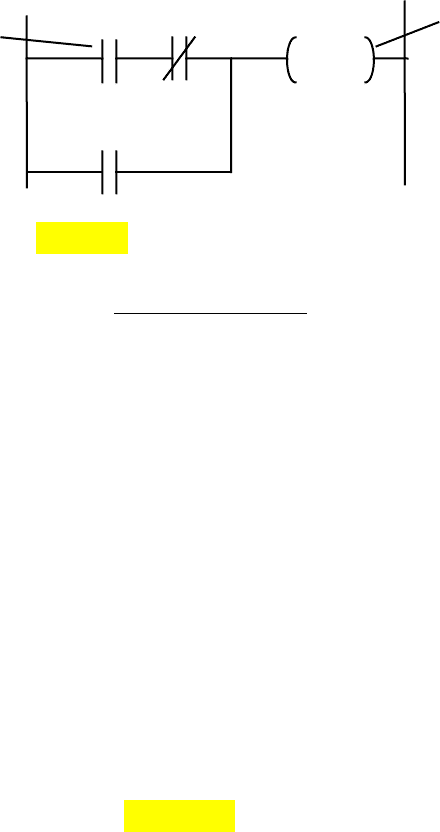
для контактов и исполнительного устройства (реле) показаны на рис. 3.12.
Рис. 3.12. Символы, используемые на принципиальных схемах:
а – нормально разомкнутого контакта,
б – нормально замкнутого контакта и в – катушки реле.
Последовательностные цепи
В последовательностных системах (sequencing system) т.е. системах
управления порядком операций выход зависит не только от текущих
значений на входе, но и от предыдущих входных сигналов и состояний
системы. Соответствующее графическое представление должно,
следовательно, включать операции записи и обозначение состояний в
различные моменты времени. Многие последовательности операций можно
описать, например, с помощью принципиальных схем и определить
некоторым числом состояний, где каждое состояние будет связано с
конкретным управляющим воздействием.
На принципиальной схеме можно представить различные состояния или
шаги, но в каждый момент времени схема находится только в одном из них.
126
Следовательно, необходим некоторый испольнительный управляющий
сигнал для перехода от одного состояния к другому. Этот управляющий
сигнал подается при удовлетворении соответствующего условия
(естественно, это условие может быть сложной комбинацией управляющих
сигналов). Он действует как сигнал сброса для одного шага и как сигнал
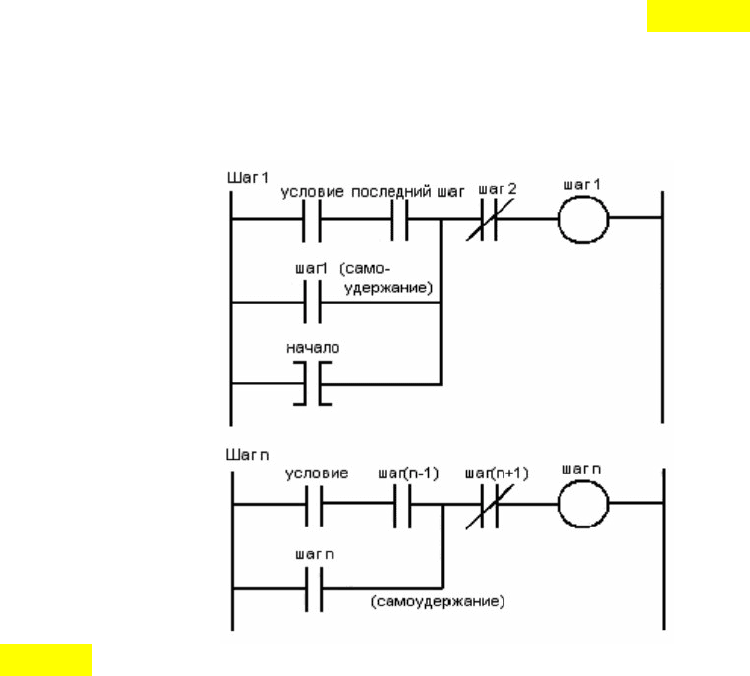
установки для следующего. То есть процесс последовательностного
управления можно описать как каскад элементов типа SR, Где каждый шаг
соответствует горизонтали принципиальной схемы (рис. 3.13). каждый
управляющий сигнал переводит следующий триггер в состояние S.
Выполнение происходит шаг за шагом и после последнего возвращается на
начало последовательности (Шаг 1).
Рис. 3.13. Последовательные операции в нотации принципиальной схемы
На практике Шаг1 инициируется с помощью кнопки старта или, в случае
замкнутой исполнительной последовательности, автоматически после
выполнения последнего шага. Когда последний шаг выполнено и условие
перехода к первому шагу удовлетворено, подается питание на катушку
Шага1, и самоудерживающееся реле сохраняет ее включенной даже после
исчезновения первого условия. Выходной сигнал первого шага также подает
питание на входные контакты «шаг1», соединенные последовательно с
контактами условия для второго шага. При выполнении этого условия реле
Шаг2 замыкает цепь для устройств Шаг2, и в то же время размыкает цепь
для устройств Шаг1. последующие шаги выполняются таким же образом.
Очевидно, что для повторяющейся последовательности необходимо
последний шаг соединить снова с устройством Шаг 1.
Такой порядок называется асинхронным (asynchronous). Если переход к
очередному шагу происходит по сигналам таймера, то это называется
синхронным (sunchronous) управлением. Таким образом, асинхронная
система определяется как управляемая событием, а синхронная – временем.
127
В промышленной автоматике асинхронный контроль встречается намного
чаще, поскольку операции большинства станков и оборудования и,
соответственно, изменение их состояния, скорее зависят от выполнения
набора условий, чем от расписания.
Построение контроллера на основе языка RLL
Рассмотрим пример программирования ПЛК.
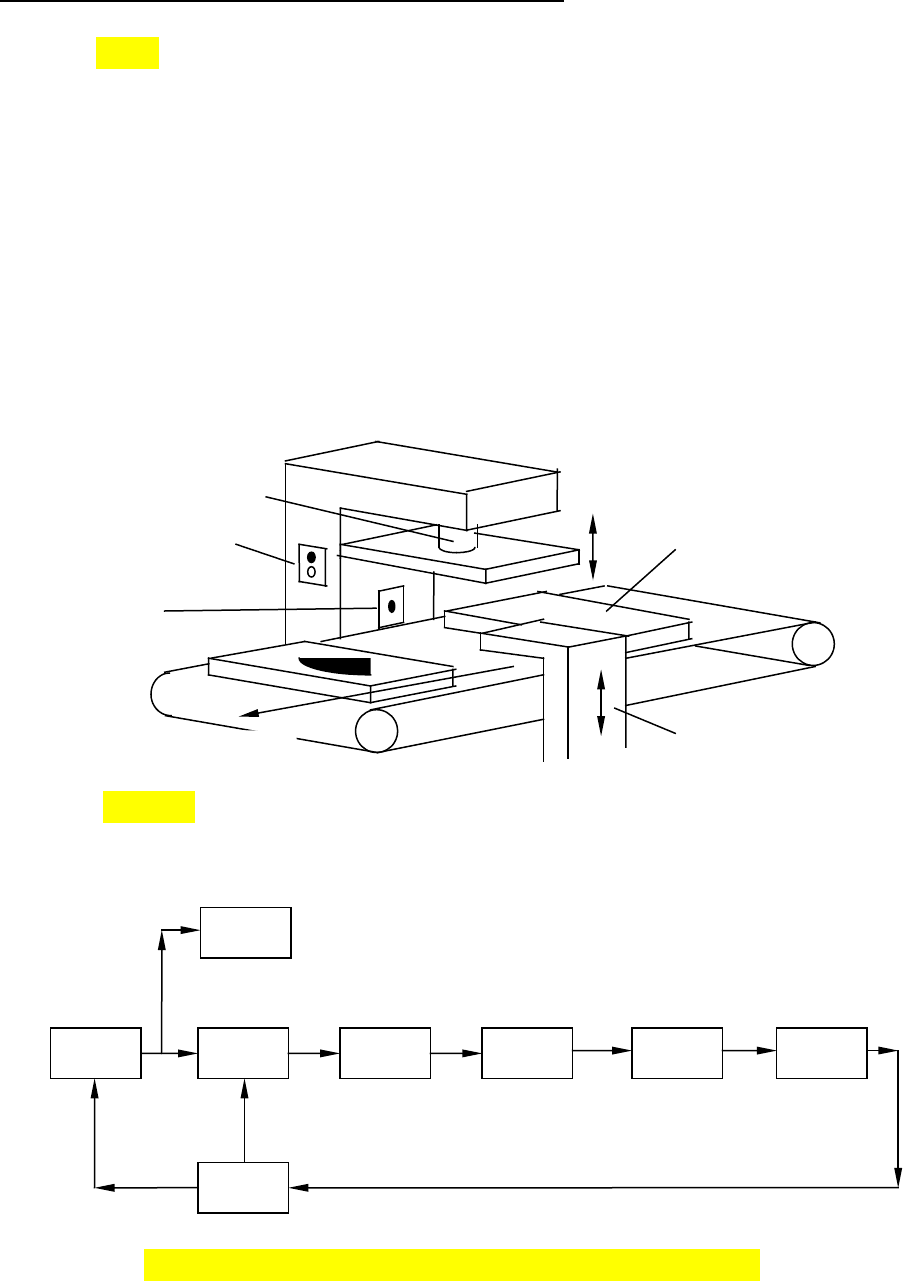
На рис. 3.14 приведена простая машина для проставления штампа на
готовых изделиях. Принцип работы машины, заключается в следующем:
1. Оператор нажимает кнопку старт для запуска машины, или кнопку стоп
для останова машины;
2. Оптический датчик проверяет наличие детали на конвейере. Конвейер
движется до тех пор, пока под штампом не появится деталь. После того как
деталь подошла к штампу, запускается алгоритм PLC;
3. Деталь зажимается на месте при помощи фиксатора (clamp);
4. Пресс ставит штамп на детали;
5. Фиксатор разжимается и готовая деталь идет по конвейеру далее;
6. При выборе одноцикличной работы машина останавливается, в
противном случае она продолжает работу при выборе автоматического
режима.
Рис. 3.14. Устройство для проштамповки готовых изделий
Рис. 3.15. Блок - схема функционирования машины
128
On/off
switch
Part
detection
sensor
switch
Clamp
Part
Press
Arm
Direction
Step 1
Wait for
start
Step 2
Check for
part
Step 3
Lock the
clamp
Step 4
Press the
part
Step 5
Unlock
clamp
Step 6
Move
conveyor
Step 2
Continuous
Check mode
Step 8
Check for
stop
Работа программы RLL.
Как только PLC начнет сканировать программу, комбинация контактов и
состояние катушек определяют, какое действие возымеет место. Поскольку
управляемая машина должна следовать определенной последовательности,
как программа обеспечивает эту последовательность? Напряжение подается
на все ступеньки одновременно, поэтому программа должна содержать
блокировки (interlock) для того чтобы ступеньки работали вместе в нужной
последовательности.
Логика RRL
PLUS
Логика RRL
PLUS
- способ программирования при помощи блок - схем.
Эта технология позволяет создавать программы которые просты и гораздо
ближе к блок - схемам работы машин. Этот язык программирования легок
для новичков и позволяет им без труда писать как маленькие, так и большие
программы.
Решение на основе RLL
PLUS
использует все те же понятные
катушки и контакты, но еще включают несколько простых функций для
разбиения программы на блок- схемы, которые называются ступенями.
Если посмотреть на программу, она очень напоминает
вертикально ориентированную блок- схему. Ступени разбивают программу
на сегменты, которые легко и просто понять, кроме того процессор
обрабатывает все эти ступени по специальным правилам обработки
инструкций Stage ™. При использовании этого подхода можно значительно
сократить время, потраченное на разработку и написание программы.
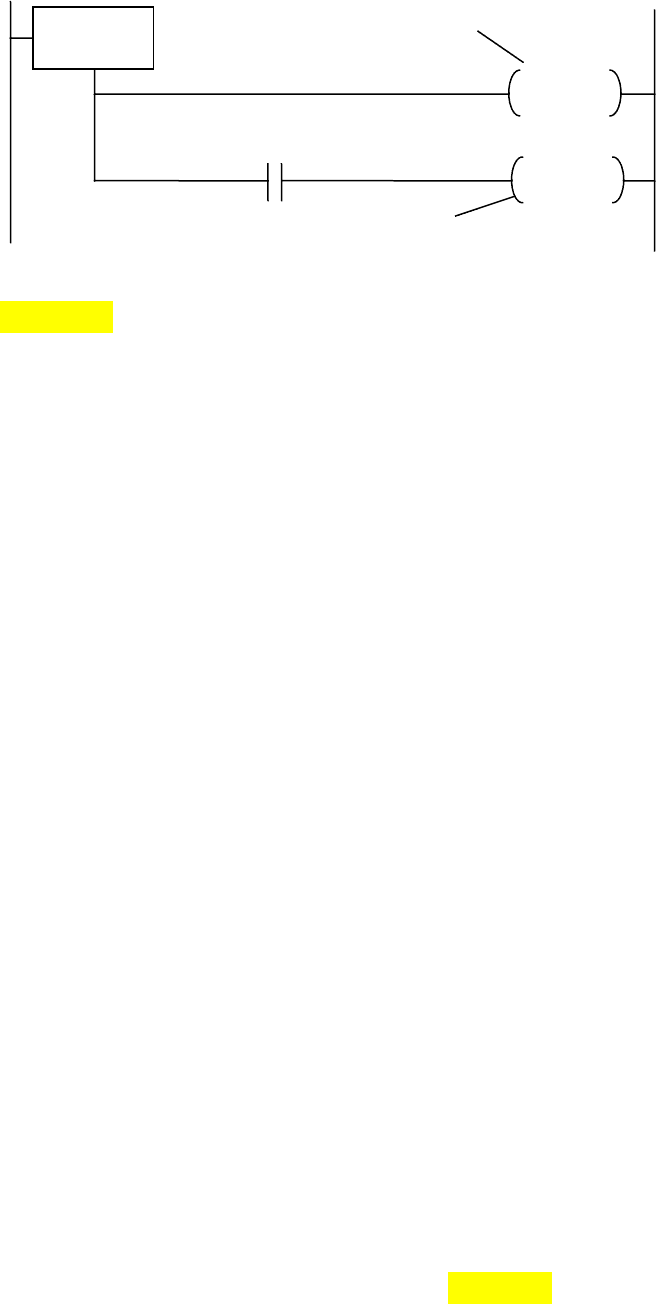
Программа на языке состоит элементарных компонентов,
имеющих вид, изображенный на рис. 3.17.
Есть несколько простых правил, в соответствии с которыми процессор
обрабатывает последовательность ступеней. Процессор обрабатывает
только активную ступень. Поскольку ступени выглядят как блок - схема, вы
можете легко писать программу которая будет выполнять соответствующие
ступени в соответствующее время, и значительно меньше фиксаций.
Опишем вкратце правила обработки информации.
Выполняются только активные ступени. Когда процессор находит
неактивную ступень,>он перепрыгивает логику этой ступени и движется к
Рис. 3.16
129
RUN
OUT
C0
Switch A
1 Cycle
C3
Start
X1
Power rail
+
Contact
(Input)
Parallel
branch
Power rail
Coil
(Output)
X0
следующей активной ступени. (Можно даже иметь параллельные ветви или
несколько активных ступеней).
Выводы автоматически выключаются,>когда ступень становится
неактивной. ( кроме случая употребления инструкции SET). Это уменьшает
количество фиксаций. Ступени активизируются следующим способом.
Начальные ступени включаются автоматически при переходе
процессора из программного режима в режим обработки информации.
Ступени могут активизироваться ,>когда программа «перескакивает» со
ступеньки на ступеньку при применении команды (JMP).
Для активизации ступени можно использовать команду SET, так же как
можно установить и точку выхода.
Ступень может быть включена, когда у программы есть переток
энергии между двумя ступенями, которые связаны вместе одним
проводником. Ступени выключается по следующему алгоритму.
Активная ступень автоматически выключается, если программа
переходит от активной ступени к другой.
Можно использовать команду Reset (RST) для выключения ступени,
точно так же как вы используете Reset для отключения выходной точки.
Текущая ступень автоматически выключается, если у программы есть
переток энергии между текущей ступенью и следующей ступенью.
При помощи контактов можно реализовать все функции алгебры
логики. Например последовательное соединение контактов - логическое И
(AND), а параллельное соединение - логическое ИЛИ (OR). Нормально
замкнутый контакт реализует инверсия (STORE NOT).
В пакете DirectSOFT моделирования логики RLLPLUS применяются
также стандартные операционные блоки, например
умножение,>деление,>запоминание и т.д. Подробнее со всеми этими
полезными вещами можно ознакомится непосредственно из описания
программы DirectSOFT.
Программа на языке RLLPLUS для рассмотренного выше устройства
для проштамповки готовых изделий, изображена на рис. 3.18.
130
SG
S0002
Stage box
Clamp
Set
Y0
Part locked
X2
S3
JMP
Power rail
Power rail
+
Output
Designation
(Jump to the next stage)
Рис. 3.17. Основной элемент логики RLL
PLUS