Иванов Ю.И., Югай В.Я. Интерфейсы средств автоматизации
Подождите немного. Документ загружается.

171
Продолжение табл. 4.4
Тип
Производи-
тель
Интернет-
сайт
CAN-версия
Наличие МК
Примечание
C515C
Infineon
www.infineon
.com
2.0B 8-bit
64k OTP, ROMless, 32k or 64k
ROM, 4 x PWM
SAE81C90/91
Infineon
www.infineon
.com
2.0Bp none 2 x 8-bit I/O ports
IniCAN
Inicore
www.inicore.
com
2.0B
8-bit or
DSP
technology independend functions
for chip integrations
AN82527
Intel
developer.intel.
com
2.0B none
AN87C196CA
Intel
developer.intel.
com
2.0B 16-bit
172
Окончание табл. 4.4
Тип
Производи-
тель
Интернет-
сайт
CAN-версия
Наличие МК
Примечание
MCP2510
Microchip
www.microch
ip.com
2.0B none
Stand-alone CAN Controller, SPI
Interface, PDIP/SOIC18,
TSSOP20
PIC18C658
Microchip
www.microch
ip.com
2.0B 8-bit
RISC MCU with 32K-byte Pro-
gram Memory, 1.5K-bytes of
SRAM, CAN 2.0B, 10bit-ADC, 9-
bit Addressable USART, SPI,
I2C,2xPWM's, in a 68L PLCC,
64L TQFP
PIC18C858
Microchip
www.microch
ip.com
2.0B 8-bit
RISC MCU with 32K-byte Pro-
gram Memory, 1.5K-bytes of
SRAM, CAN 2.0B, 10bit-ADC, 9-
bit Addressable USART, SPI, I2C,
2xPWM's, in a 80L TQFP, 84L
PLCC
CDC0806E
Micronas
www.micronas.
com
1 x 2.0B 8-bit Flash 56k Byte Flash, 16 time-stamps
CDC1607F
Micronas
www.micronas.
com
3 x 2.0B 16-bit Flash
256k Byte Flash, 3 independent
CAN-Modules, 16 time-stamps
173
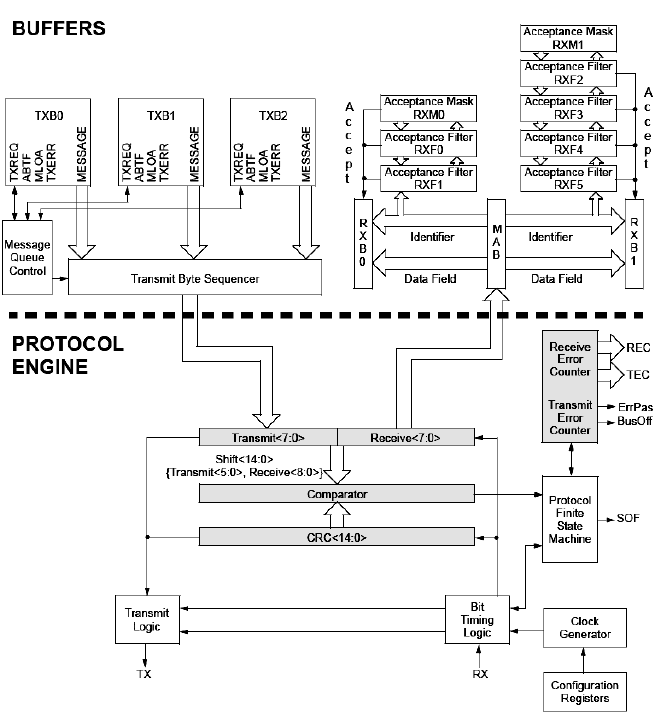
CAN-модуль состоит из двух основных узлов: буфера сообщений и кон-
троллера протокола (рис. 4.8). Буферы сообщений обеспечивают хранение
данных, обычно эти буферы раздельные для приема и передачи сообщений.
Буфер приема производит хранение принятых сообщений до начала их обра-
ботки. Буфер передачи должен сохранять, по крайней мере, одно передавае-
мое сообщение, так
как передача может начинаться только при незанятой
шине, и, кроме того, не каждая начатая передача может завершиться успеш-
но.
Рис. 4.8. Функциональные узлы CAN-модуля
174
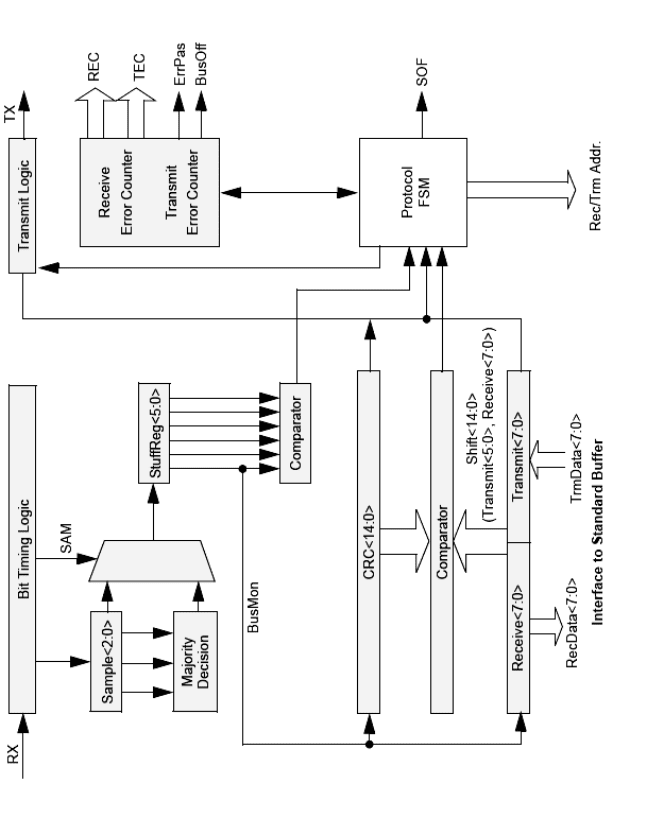
В свою очередь контроллер протокола состоит из нескольких блоков, по-
казанных на рис. 4.9. Основной частью контроллера является управляющий
блок – FSM. Это последовательный конечный автомат с изменением управ-
ляющих сигналов при различных типах сообщений и различных состояниях
передачи/приема данных.
FSM выполняет следующие функции:
• управление последовательным потоком данных между TX/RX и
сдвиговым регистром
;
• вычисление и контроль CRC;
• обработка ошибок;
• управление параллельным потоком данных между сдвиговым реги-
стром и буфером;
• выполнение арбитража;
• сигнализация об ошибках согласно CAN протоколу;
• автоматическая повторная передача сообщений.
Интерфейс передачи данных от контроллера к буферу – параллельный 8-
разрядный. Сообщение разбивается на байты для побайтового обмена дан-
ными
между буфером и сдвиговым регистром. FSM контролирует последова-
тельность байтов от начала сообщения до его завершения.
Регистр циклического контроля избыточности (CRC) формирует CRC код,
который побайтно будет передан при передаче данных, и проверяет код CRC
при получении сообщения.
Логика управления обработкой ошибок (EML) формирует сигнал о неис-
правности CAN-модуля. Состояния счетчиков ошибок передачи и
приема
увеличиваются или уменьшаются сигналами процессора потока. Согласно
значениям счетчиков ошибок CAN модуль может находиться в состоянии:
• активной ошибки;
• пассивной ошибки;
• отключен от шины.
С помощью BTL осуществляется контроль линейного входа шины: обра-
батывается состояние шины и выполняется синхронизация бита с коррекцией
временных интервалов согласно CAN-протоколу. BTL синхронизируется при
переходе
от “recessive” к “dominant” биту. Синхронизация производится из-
менением программируемых временных сегментов битового интервала для
компенсации изменений времени распространения и смещения фазы приня-
того сигнала. Программирование BTL зависит от скорости передачи данных
и физического времени запаздывания сигналов в канале связи.
175
Рис. 4.9. Контроллер протокола
176
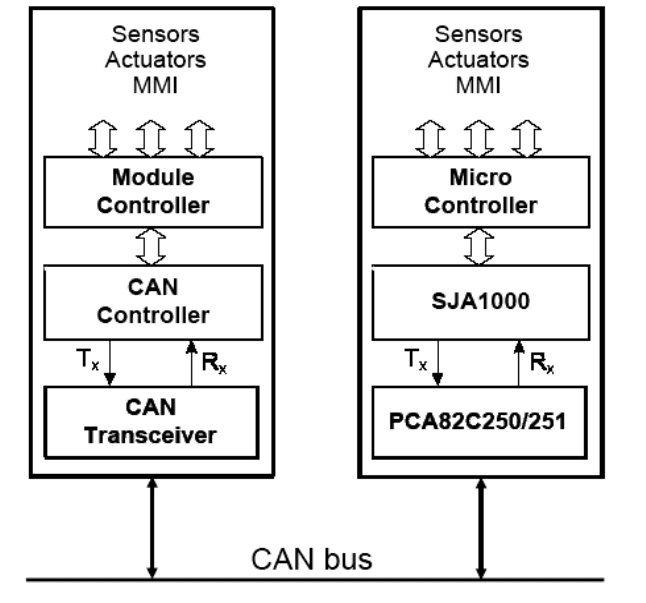
Рассмотрим построение CAN-сети на основе микроконтроллера, CAN-
контроллера и CAN-трансивера. Структурная схема сети на основе микро-
схем фирмы Philips показана на рис. 4.10.
Рис. 4.10. Схема CAN-сети на основе изделий фирмы Philips
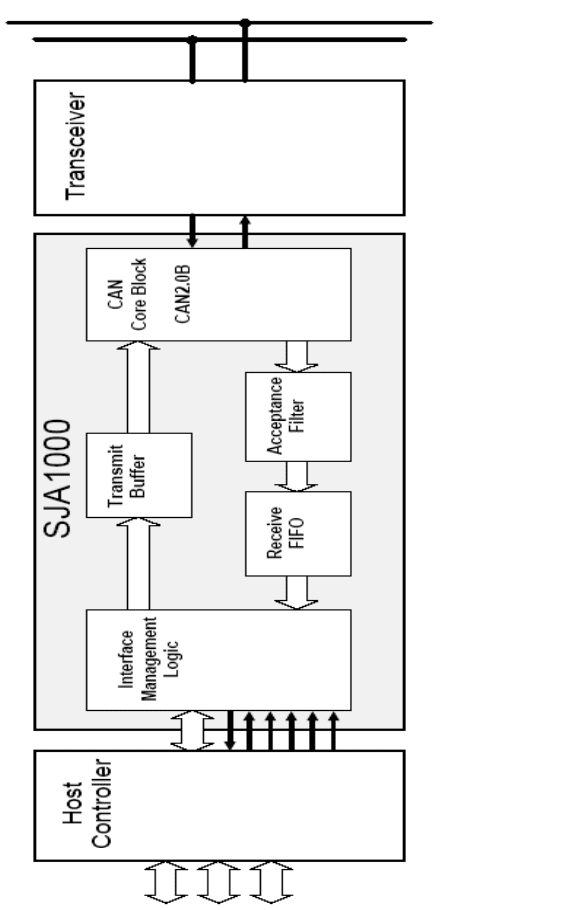
Связь микроконтроллера с CAN-контроллером SJA1000 Philips осущест-
вляется с помощью параллельного интерфейса (рис. 4.11). Стандартная схема
подключения CAN-контроллера SJA1000 к микроконтроллеру и трансиверу
показана на
рис. 4.12. Параллельный интерфейс с использованием запросов
прерываний необходим для обработки поступающих сообщений в реальном
масштабе времени. Взаимодействие CAN-контроллера с трансивером обес-
печивается сигналами T
X
, R
X
в полнодуплексном режиме,
177
Рис. 4.11. Функциональная схема CAN-контроллера SJA1000

178
Рис. 4.12. Схема внешних соединений CAN-контроллера SJA1000
179
так как алгоритмы контроля и арбитража требуют одновременной обработки
передаваемых сигналов и сигналов, реально присутствующих в CAN шине.
Все основные функции протокола по управлению обменом данными CAN-
контроллер выполняет самостоятельно и полностью обеспечивает прием и
передачу сообщений по коммуникационной сети со всеми необходимыми
процедурами контроля. Ресурсы основного микроконтроллера (Host
controller) освобождаются и должны использоваться
только для обработки
сообщений.
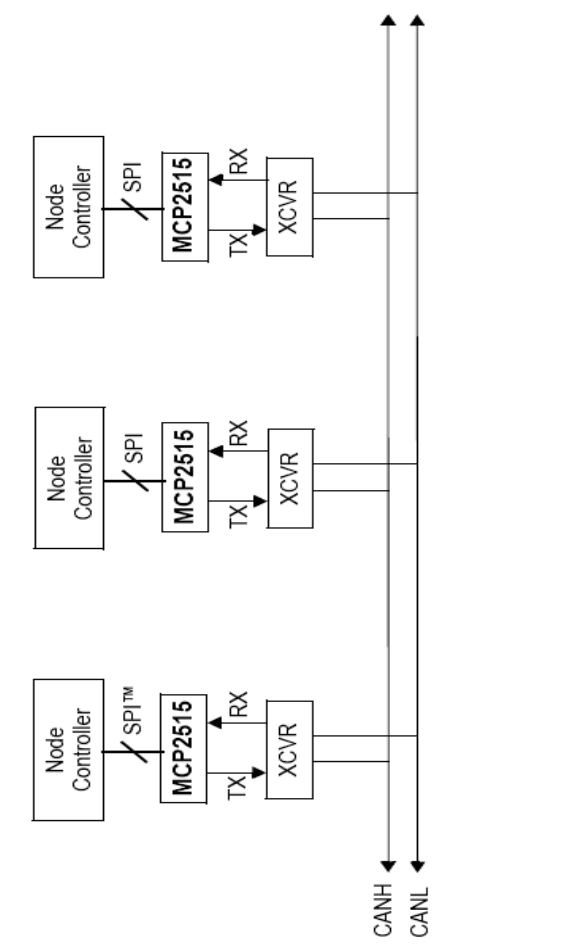
Автономный CAN-контроллер MCP2515 с SPI-интерфейсом выпускает
фирма Microchip. Организация микроконтроллерной сети на основе этой
микросхемы показана на рис. 4.13, а функциональная схема MCP2515 – на
рис. 4.14. SPI-интерфейс в сочетании с дополнительными сигналами преры-
ваний позволяет реализовать эффективные процедуры обмена данными с ми-
нимальным числом линий связи и необходимым временем реакции для
CAN-
контроллера.
Из приведенных примеров средств для построения CAN-сети видно, что
изделия многих фирм обладают сходными характеристиками, в полной мере
позволяют реализовать необходимые процедуры протокола. При проектиро-
вании средств автоматизации весьма широкая номенклатура изделий предос-
тавляет возможность выбора необходимых компонентов с учетом многих до-
полнительных факторов.
180
Рис. 4.13. CAN-сеть на основе контроллера MCP2515