Иванов Ю.И., Югай В.Я. Интерфейсы средств автоматизации
Подождите немного. Документ загружается.

151
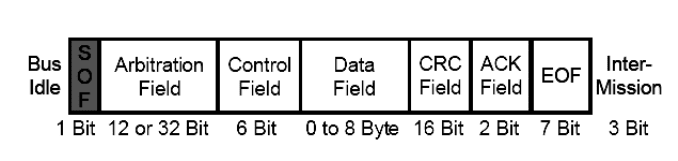
Рис. 4.2. CAN кадр
Управляющее поле содержит бит расширения идентификатора (IDE –
identifier extension), который указывает тип формата кадра: стандартный (0)
или расширенный (1). В этом поле также находятся четыре бита DLC для
указания длины поля данных и зарезервированный для будущего применения
бит R0. В расширенном формате после бита IDE следуют 18 дополнитель-
ных бит идентификатора (удлинение поля Arbitration Field до 32 бит). За
управляющим полем идут поле данных (0-8 байт) и поле циклического кон-
троля CRC длиной 15 бит плюс рецессивный бит ограничителя этого поля.
Образующий полином CRC для контроля кадра – (x
15
+ x
14
+ x
10
+ x
8
+ x
7
+ x
4
+ x
3
+ 1).
Поле подтверждения (АСК) состоит из области АСК длиной в 1 бит и ог-
раничителя поля АСК. АСК-бит помещается на шину передатчиком как ре-
цессивный (логическая 1). Приемники, корректно принявшие эти данные,
преобразуют его в логический 0, делая его доминантным. Таким образом, пе-
редающий узел получает подтверждение, что хотя бы один приемник пра
-
вильно принял его сообщение. Сообщения подтверждаются приемниками не-
зависимо от результата тестирования данных при приёме.
Конец сообщения указывается EOF (7 рецессивных бит), после которого
идет пауза. Длина паузы равна минимальному количеству битов (3 бита), от-
деляющих последовательные сообщения.
В CAN протоколе не используется подтверждение сообщений. Вместо
этого сигнализируется о возникших ошибках передачи. Всего
в CAN-
протоколе реализовано пять механизмов проверки на наличие ошибок. Флаг
ошибки – это сообщение, содержащее 6 доминантных бит подряд. Другие уз-
лы, приняв такую последовательность, также могут передать флаг ошибки.
Первые три алгоритма контроля реализованы на уровне сообщений:
• Циклический контроль. Контролируемые поля кадра от SOF до CRC.
При использовании этого метода в конце
передачи добавляются
биты циклического избыточного кода. При приеме сообщения
происходит его повторное вычисление и сравнение с получен-
ным кодом циклического контроля. Если эти два значения не
совпадают, то выявляется ошибка CRC.
152
• Контроль кадра. Проверяется соответствие структуры передаваемого
кадра его фиксированному формату и размеру. Ошибки, кото-
рые могут возникнуть при проверке кадра, получили название
"ошибки формата".
• Ошибки подтверждения. Как уже ранее было сказано, принятые кадры
подтверждаются всеми приемниками. Если передатчик не полу-
чил никакого подтверждения, то это может
означать, что при-
емники обнаружили ошибку (искажено поле АСК), либо прием-
ники вообще отсутствуют в сети.
Следующие два алгоритма определения ошибок реализованы в протоколе
CAN на битовом уровне:
• Мониторинг шины. Одна из особенностей CAN сети состоит в том, что
передающий узел контролирует сигнал на шине во время пере-
дачи. Таким
образом, каждый узел может наблюдать за уровнем
сигнала на шине и определять различие переданного и принято-
го бита. Расхождение сигналов в поле арбитража требует пре-
кращения передачи, а расхождение в других полях кадра гене-
рирует ошибку.
• Заполнение битами. В CAN используется сигнальный код NRZ. При
длинных последовательностях битов с одним
и тем же значени-
ем возможен сбой синхронизации. Если в сообщении подряд
идут пять битов с одинаковым значением, то передатчик авто-
матически вставляет дополнительный бит. Этот бит автоматиче-
ски удаляется из сообщения приемниками. Если будет получено
шесть и более последовательных битов с одним и тем же значе-
нием, это считается
ошибкой.
Если в течение передачи кадра хотя бы один узел обнаружит ошибку (ло-
кальная ошибка), то он передает кадр ошибки, который аварийно завершает
текущую передачу. В этом случае все узлы сети не обрабатывают принятое
сообщение, чем достигается непротиворечивость данных во всей сети. Узлы
сети, не обнаружившие ошибку, после приема кадра
ошибки должны повто-
рить передачу кадра ошибки (глобализация ошибки), поэтому максимальная
длина этого поля может достигать 12 доминантных бит. Завершается кадр
ошибки ограничителем флага ошибки из 8 рецессивных бит. После стандарт-
ной паузы (3 бита), прерванная кадром ошибки передача должна быть повто-
рена. Как правило, повторная передача начинается в течение периода време-
ни, соответствующего
передаче 23 битов, отсчитываемого с момента обна-
ружения ошибки.
Для реализации процедур самоконтроля каждый узел CAN сети содержит
два счетчика: счетчик ошибок приема (REC) и счетчик ошибок передачи
(TEC). Счетчики автоматически инкрементируются после обнаружения каж-
153
дой ошибки и декрементируются после корректной передачи или приема
кадра. В зависимости от состояния счетчиков ошибок узел может находиться
в одном из трех состояний: активной ошибки, пассивной ошибки, отключен
от шины.
Состояние активной ошибки является основным для узла CAN сети и
предполагает его нормальное функционирование. При обнаружении ошибки
в этом состоянии
узел посылает кадр активной ошибки (6 доминантных бит).
Состояние активной ошибки будет продолжаться до тех пор, пока число
ошибок в любом из счетчиков не превышает 127. Если число ошибок превы-
шает 96, микроконтроллеру узла передается сообщение о критическом числе
ошибок. При числе ошибок более 127, но менее 256 узел переходит в состоя-
ние пассивной ошибки.
Состояние пассивной ошибки свидетельствует о часто повторяющихся
ошибках. Узел из этого состояния может самостоятельно вернуться к актив-
ной ошибке, если число ошибок в счетчиках станет менее 128. При обнару-
жении очередной ошибки узел имеет право передать только кадр пассивной
ошибки (6 рецессивных бит), который не может изменить текущую передачу
любого другого узла.
При повторении прерванной передачи этого узла долж-
на быть сделана дополнительная пауза (8 рецессивных бит) для того, чтобы
не мешать передаче кадров других узлов.
Если число ошибок в любом из счетчиков превысит 255, узел должен от-
ключиться от шины (на практике REC содержит только 8 двоичных разрядов
и поэтому число ошибок приема не может
превысить этот порог). Самостоя-
тельно CAN контроллер узла не может вернуться в рабочее состояние. Если
произведен внешний сброс, CAN контроллер возвращается в состояние ак-
тивной ошибки и после паузы 128х11 (1408) может передавать сообщения.
CAN протокол определяет правила накопления числа ошибок в счетчиках
REC и TEC. В зависимости от вида ошибки увеличение числа ошибок в счет
-
чиках может быть от 1 до 8 при обнаружении однократной ошибки. Декре-
мент содержимого счетчиков в состоянии активной ошибки производится
всегда только на 1. Это позволяет присваивать разные веса различным ошиб-
кам.
Например, обнаружение ошибки при приеме увеличивает REC на единицу
одновременно с отправкой кадра активной ошибки; если принимается доми-
нантный бит после отправки
узлом кадра активной ошибки, REC увеличива-
ется на 8, т.к. это означает, что только данный узел обнаружил ошибку. TEC
увеличивается на 8 при передаче кадра ошибки. Успешная передача кадра
уменьшает TEC на 1 (если значение не 0). Успешный прием кадра узлом
уменьшает REC (если он был не 0) на 1 в состоянии активной ошибки; если
узел был в состоянии
пассивной ошибки, в REC устанавливается величина от
154
119 до 127 (т.е. при TEC менее 128 узел перейдет в состояние активной
ошибки).
Любой узел может также послать кадр перегрузки (overload frame), если,
во-первых, он не успевает обрабатывать поступающие сообщения и не может
обеспечить прием следующего сообщения, во-вторых, при приеме доминант-
ных бит в паузе между кадрами (это может означать потерю синхронизации
при приеме). Кадр перегрузки имеет такой же формат, как и кадр ошибки, но
передается всегда только после завершения приема кадра. А кадр ошибки
может быть передан только в процессе передачи кадра. Кадр перегрузки не
увеличивает состояние счетчиков ошибок и не приводит к повторной переда-
че кадров. Допускается передача узлом не
более 2 кадров перегрузки подряд.
В соответствии со всеми процедурами контроля:
• передача кадра считается успешной, если не обнаружено ошибок до кон-
ца поля EOF;
• прием кадра считается успешным, если не обнаружено ошибок и в тече-
ние межкадрового интервала (3 бита после EOF).
Необходимо помнить, что CAN протокол не содержит эффективных
средств контроля
и восстановления искаженных данных кроме процедуры
контроля CRC. Процедуры LLC не предусмотрены, несмотря на высокую
помехоустойчивость возможны выпадения и вставки. Если необходимы до-
полнительные средства контроля данных, они должны реализовываться HLP
протоколами.
В настоящее время выпускают CAN контроллеры, которые поддерживают
одну из трех версий протокола. Версия CAN 2.0A поддерживает работу толь-
ко с кадрами стандартного формата
, имеющими 11-битный идентификатор.
CAN 2.0B passive обеспечивает передачу кадров стандартного формата, а
прием и обработку кадров и стандартного формата, и расширенного формата
с 29-битным идентификатором. CAN 2.0B active обеспечивает обработку
кадров обоих форматов.
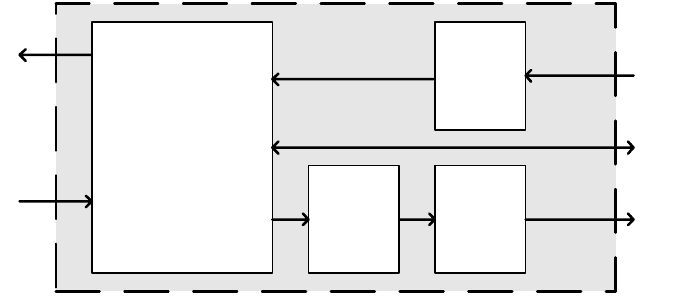
Стандартная структура CAN контроллера приведена на рис. 4.3. Очевид-
но, что CAN контроллер должен содержать буферные ЗУ и для передаваемых
данных, и для принимаемых данных.
Реализация процедур CAN протокола,
как правило, производится аппаратно с передачей через трансивер выходных
сигналов узла (Tx) и входных сигналов с шины (Rx). Приемный фильтр аппа-
ратно производит селективную запись принимаемых кадров по их идентифи-
каторам в буферное ЗУ. Предполагается, что буфер передачи должен обеспе-
чивать хранение, по крайней мере, одного сообщения, а буфер приема
– не
менее двух сообщений. Чаще всего CAN контроллеры имеют больший объем
буферных ЗУ. Доступ к данным в буферных
155
Рис. 4.3. Структура CAN контроллера
ЗУ может производиться по алгоритму FIFO либо в более сложных реализа-
циях с учетом уровня приоритета, определяемого идентификатором. Интер-
фейс CAN контроллера с управляющим микроконтроллером узла – стандарт-
ный. Через этот интерфейс производится настройка параметров, режимов,
приемного фильтра и т.п., а также обмен данными с CAN шиной. В настоя-
щее время производится достаточно большое число управляющих микрокон-
троллеров, которые содержат встроенные средства для обмена данными по
CAN сети.
В связи с тем, что CAN протокол определяет только процедуры физиче-
ского и MAC уровней, а построение сети требует решения и других задач,
связанных, например, с процедурами LLC, процедурами выбора параметров
и режимов при инициализации
работы узлов, разработаны так называемые
CAN HLP протоколы.
4.1.3. CAN HLP протоколы
К настоящему времени известно уже более четырех десятков CAN HLP.
Среди CAN HLP наибольшее распространение в системах промышленной ав-
томатизации получили четыре, поддерживаемых ассоциацией CiA:
CAL/CANopen, CAN Kingdom, DeviceNet и SDS.
CAL/CANopen. CAL не является ориентированным на конкретные при-
ложения протоколом, не содержит каких-либо профилей, привязанных к кон-
кретным устройствам, и
не определяет содержание передаваемых данных, но
предлагает стандартизованные элементы сетевого сервиса прикладного уров-
ня. CAL включает в себя четыре составные части:
• спецификация CAN сообщений (CMS CAN Message Specification);
Реализация
протокола
Фильтр
приема
кадров
Буфер
передачи
данных
Буфер
приема
данных
Tx
Rx
(формирование кадров,
обнаружение ошибок,
подтверждение,
синхронизация,
бит-стаффинг)
Интерфейс
контроллера
156
• сетевое управление (NMT Network Management);
• распределение идентификаторов (DBT Identifier Distributor);
• управление уровнем (LMT Layer Management).
CMS определяет типы объектов взаимодействия в рамках объектно-
ориентированного подхода, правила и механизмы передачи данных разных
типов посредством CAN кадров, включая передачу пакетов длиной более 8
байт. Сетевое управление построено на взаимодействии типа ведущий-
ведомый (master-slave). Один модуль сети является NMT-мастером, все ос-
тальные
– NMT-ведомые. NMT-мастер инициализирует и управляет NMT-
ведомыми, которые принимают участие во взаимодействии, и позволяет им
общаться между собой посредством CMS-сервисов. Также в задачи сетевого
управления входят контроль ошибок и конфигурирования устройств. Благо-
даря DBT-сервисам происходит бесконфликтное распределение идентифика-
торов среди модулей под контролем DBT-мастера. Посредством LMT-
сервисов возможны запрос и изменение текущих
параметров в модулях (зна-
чений идентификаторов, скорости передачи, битового квантования и т. п.)
непосредственно из CAN-сети.
Результатом дополнения CAL явилось появление более "конкретного"
протокола CANopen. По существу CANopen является приложением приклад-
ного уровня CAL. В сети CANopen на прикладном уровне модули обменива-
ются между собой объектами-сообщениями COB (Communication Object),
включающими в себя один или несколько кадров. Администрированием
сети
занимается NMT-мастер, который инициализирует устройства, обеспечивает
контроль ошибок, а также производит их периодическую "перекличку" (Life
Guarding) для выявления узлов, находящихся в нерабочем состоянии ввиду
физического отсутствия или отключения от шины (bus off) по счетчику оши-
бок. Для максимального упрощения процесса интеграции модулей в единую
сеть используется концепция профилей. К настоящему времени завершено
формирование
следующих профилей устройств:
• модули ввода/вывода (аналоговые и цифровые) (DSP-401);
• приводы и модули управления перемещением (DSP-402);
• элементы человеко-машинного интерфейса (DSP-403);
• измерительные устройства и регуляторы (WD-404);
• кодеры (DSP-406).
CAN Kingdom. Протокол шведской компании KVASER-AB занима-
ет особое место среди CAN HLP не только из-за своего необычного названия
(CAN королевство), но и в
значительной степени благодаря оригинальной
концепции сетевого взаимодействия и эффективности CAN-приложений на
его основе. Основой сетевого взаимодействия CAN Kingdom является прин-
цип: "Модули обслуживают сеть" (MSN Modules Serves the Network) в отли-
157
чие от принципа "Сеть обслуживает пользователей" (NSM Network Serves the
Modules), свойственного компьютерным сетям.
CAN система на базе протокола CAN Kingdom обладает следующими
особенностями:
• Распределение CAN идентификаторов находится под полным контро-
лем разработчика.
• Максимальное время прохождения любого сообщения в сети предска-
зуемо.
• Во время начальной инициализации системы происходит обязатель-
ный этап настройки протокола, включая построение
форматов данных,
начиная с битового уровня, методов управления шиной, распределение
идентификаторов и т. д.
• В системе всегда должен присутствовать (как минимум до завершения
настройки протокола) супервизор (Король), производящий инициали-
зацию системы, контроль подключенных узлов и т. д. Ни один модуль
не может принимать участие в сетевом обмене без разрешения Короля
.
• Перед инициализацией сети каждый модуль должен иметь свой номер
(CAN Kingdom не описывает конкретный способ установки номера
модуля это может быть DIP-переключатель, энергонезависимая память
или конфигурация соединителя) и "знать" идентификатор сообщения
инициализации (королевское письмо) и скорость передачи данных в
сети.
• В сеть CAN Kingdom возможна интеграция любых CAN-модулей,
включая разработанных для других
протоколов, например, DeviceNet
или SDS.
• Не существует каких-либо рекомендуемых скоростей передачи дан-
ных. Но за первые 200 мс после подачи питания узел обязан настро-
иться на прослушивание шины на скорости 125 кбит/с. Допустимы от-
личающиеся от ISO 11898 спецификации физического уровня.
Наличие одного центра-Короля, который содержит всю информацию о
системе, избавляет от
использования профилей устройств, часто применяе-
мых в других HLP.
DeviceNet – протокол, разработанный и опубликованный в 1994 году
компанией Allen-Bradley корпорации Rockwell, – недорогое, простое и эф-
фективное решение для объединения разнообразных устройств промышлен-
ной автоматизации. Важной особенностью сети DeviceNet является возмож-
ность питания модулей непосредственно от сетевого кабеля, также допуска-
ется применение нескольких источников питания в
любой точке шины. Все
это дает возможность построения автономной сети, не зависящей от наличия
или качества внешнего питания.
Сообщения в сети DeviceNet могут быть двух типов:
158
• Сообщения ввода/вывода (I/O messages) предназначены для целей
управления устройствами и передачи данных в реальном времени ме-
жду узлами в широковещательном или в режиме точка-точка. Исполь-
зуют идентификаторы с высоким приоритетом, которые и определяют
содержание сообщения.
• Явные сообщения (Explicit messages) для многоцелевого обмена дан-
ными в режиме точка- точка. Обеспечивают типичный сервис
за-
прос/ответ. Используют идентификаторы с низким приоритетом и
применяются обычно для конфигурирования устройств и целей диаг-
ностики.
При необходимости передачи данных длиной более 8 байт применяется
механизм фрагментации. В зависимости от потребностей обмена и возмож-
ностей модулей, возможны мастер-слуга (master-slave), мультимастерный
(multi-master), или равноправный (peer to peer) способы взаимодействия уст-
ройств. Пересылки данных
могут инициироваться путем опроса, циклически
или по изменению их значения (change of state). Максимальное число узлов в
сети DeviceNet – 64.
SDS – разработка компании Honeywell Inc. Наряду со стандартом
DeviceNet, SDS представляет собой еще одно недорогое и законченное реше-
ние для сетевого управления интеллектуальными устройствами в системах
промышленной автоматизации. Сообщения в сети SDS носят название APDU
(Application layer Protocol Data Unit) – блоки данных протокола прикладного
уровня. APDU представляет
собой кадр стандартного формата (расширенный
формат в SDS-сети не применяется). Сеть SDS всегда требует наличия един-
ственного мастера-менеджера сети как минимум на этапе включения для вы-
полнения автонастройки модулей. В процессе работы сети допускается нали-
чие нескольких мастеров на шине, но они должны функционировать в преде-
лах своих адресных доменов,
а при включении сети только один из них мо-
жет брать на себя функцию сетевого менеджера для автонастройки скорости
устройств.
APDU используется в следующих сервисах прикладного уровня:
• change of State (OFF, ON, OFF ACK, ON ACK) – обнаружение измене-
ния состояния логического устройства;
• write (ON State, OFF State, ON State ACK, OFF State ACK) – управле-
ние состояниями логического устройства.
• channel – обеспечение как широковещательного (multicast), так и рав-
ноправного (peer to peer) каналов
соединения;
• connection – открытие/закрытие индивидуальных типов соединения;
• write – чтение атрибутов объектов устройства;
• read – изменение атрибутов объектов устройства;
• action – команда объекту устройства выполнить действие;
159
• event – сигнализация о событии объектом устройства.
При инициализации взаимодействия модулей сети SDS используются 4 сер-
висных функции-примитива:
• запрос (Request) – генерация APDU устройством-инициатором соеди-
нения;
• ответ (Response) – ответный APDU устройства-ответчика;
• индикация (Indication) – фиксация факта приема APDU устройством-
ответчиком;
• подтверждение (Confirm) – подтверждение приема APDU устройст-
вом-инициатором.
Применение CAN протокола в качестве коммуникационного средства в
системах автоматизации в настоящее время постоянно расширяется. Универ-
сальность и функциональная гибкость позволяет создавать эффективные ин-
терфейсы при самых различных требованиях. Определенные дополнительные
задачи, выходящие за рамки CAN протокола, могут решаться с помощью
HLP протоколов. Следует учитывать, что достоинства CAN протокола реали-
зуются существенным усложнением алгоритмов работы интерфейсных
средств. Этот фактор не является
препятствием для применения этой комму-
никационной технологии. Существует весьма широкая номенклатура техни-
ческих средств автоматизации от отдельных интегральных микросхем до
сложных функциональных модулей, содержащих встроенные CAN интер-
фейсы.
4.1.4. Средства реализации CAN технологии
Многие ведущие производители электронных компонентов выпускают
CAN – контроллеры и трансиверы в виде интегральных схем.
CAN-трансиверы, реализующие физический уровень коммуникационной
сети, производятся компаниями Philips, Bosch и др. (табл. 4.2).
CAN-трансивер фирмы Atmel – интегральная схема ATA6660 (рис. 4.4),
выполненная по технологии Atmel Smart Power BCD60-III. Она специально
разработана для высокоскоростного CAN-контроллера (CAN-C) с дифферен-
циальным режимом передачи данных между CAN-контроллерами и физиче-
скими дифференциальными линиями шины.
160
Таблица 4.2
Производитель
Bosch
Mietec
Philips
Semiconductors
SGS-Thomson
Temic (Siliconix)
Texas Instruments
Тип
CF150B
MTC-3054
82C250
82C251
L9615
Si9200EY
SN65HVD230
(SN65HVD231)
SN65HVD232
Макс. ско-
рость
[MБод]
0.5 1 1 1 0.5 1 1 1
Температ.
защита
(1,2) n.a. yes yes (1, 2) yes yes yes
Задержка
[нс]
230 100 170 170 230
120
(4)
70 70
Напряжение
питания [В]
5 5 5 5 5 5 3,3 3,3
Ток потреб-
ления [мA]
<80 110 <70 <80 <80 70 10 10
Ток в пас-
сивном ре-
жиме [мкA]
n.a. 300 <170 <275 n.a. n.a.
370
(10)
n.a.