Гумеров Р.И. Цифровые сигнальные процессоры: сигналы, архитектура, основные элементы
Подождите немного. Документ загружается.


независимых векторов {
k
ϕ
} называется базисом этого пространства. Любое
множество N линейно-независимых векторов в A
N
может служить его
базисом, и каждый вектор в A
N
соответствует единственной линейной
комбинации векторов {
k
ϕ
} и единственному множеству скалярных
коэффициентов {
k
α
} ({
k
α
} – представление вектора по отношению к
данному базису). Если в пространстве определено скалярное произведение,
то, пользуясь им, можно установить простое соотношение между сигналом и
его представлением.
Представление сигналов как элементов линейного конечномерного
пространства удобно потому, что позволяет описать любой сигнал
набором стандартных базисных функций и набором чисел. Выбор базиса
определяется удобством
нахождения представления сигналов и, конечно,
существом задачи, то есть особенностями сигналов.
Наиболее употребительны два класса базисных функций: сдвиговые
базисные функции и мультипликативные. Первые строятся из одной функции
путем сдвига по ее аргументу. Вторые же обладают тем свойством, что
произведение двух функций дает также базисную функцию из той же
системы. Это
свойство используется для построения системы базисных
функций путем многократного перемножения одной и той же функции.
Примером первых могут служить импульсные базисные функции и функции
отсчетов; примером вторых – экспоненциальные функции.
Взаимный базис. Пусть A
N
– N-мерное пространство с базисом {
k
ϕ
},
k=0,1,…,N-1, т.е.состоящее из векторов вида
a =
, (2.2)
∑
−
=
1
0
N
k
kk
ϕα
а {
k
ψ
} – векторы, которые попарно ортогональны к {
k
ϕ
} и нормированы так,
что
⎩
⎨
⎧
≠
=
==
lk
lk
lkkk
,0
,1
,
,
δψϕ
(2.3)
13

Символ
lk ,
δ
есть символ Кронекера (дельта-функция). Базис {
k
ψ
},
удовлетворяющий этому соотношению называется взаимным к {
k
ϕ
} и его
можно использовать для вычисления коэффициентов представления {
k
α
}:
l
N
k
lkk
N
k
lkkl
a
αδαψϕαψ
===
∑∑
−
=
−
=
1
0
,
1
0
,,. (2.4)
Двумерные базисные функции обычно получают как произведение
одномерных. Это делается для того, чтобы упростить вычисление
коэффициентов представления сигналов по таким функциям: в случае
разделимых базисов, являющихся произведением функций одной
переменной, вычисление двумерного интеграла скалярного произведения
сводится к вычислению двух одномерных интегралов.
2.2 Линейные системы и системы инвариантные к сдвигу
Взаимосвязь
вход/выход определяется как система, если имеется
однозначное соответствие между выходным сигналом и каким-либо входным
[2]. Система T , которая соотносит вход x(n) с выходом y(n) может быть
представлена как:
y(n) = T[x(n)].
Это очень широкое определение системы. Если нет каких-либо ограничений
характеризующих систему, то требуется полное задание взаимосвязей между
входом и
выходом. Знание состояний системы на выходе для некоторого
множества входных сигналов, в общем, не позволяет нам определить выход
системы для других наборов сигналов. Есть два ограничения, которые очень
упрощают описание и анализ систем, - это линейность и инвариантность к
сдвигу. И на практике, к счастью, множество систем могут (хотя бы
приближенно) рассматриваться
как линейные и инвариантные к сдвигу.
Линейность системы определяется в следующем виде:
Линейность
Ù
T[ax
1
(n) + bx
2
(n)] = ay
1
(n) + by
2
(n), (2.5)
14
где T[x
1
(n)] = y
1
(n), T[x
2
(n)] = y
2
(n), a и b – любые скалярные константы, а
A Ù B означает, что A является следствием B и B является следствием A.
Это условие также называется принципом суперпозиции.
Инвариантность к сдвигу или пространственная инвариантность системы
определяются следующим образом:
Инвариантность
Ù
T[x(n – m)] = y(n - m), (2.6)
где y(n) = T[x(n)], а m – любое целое число.
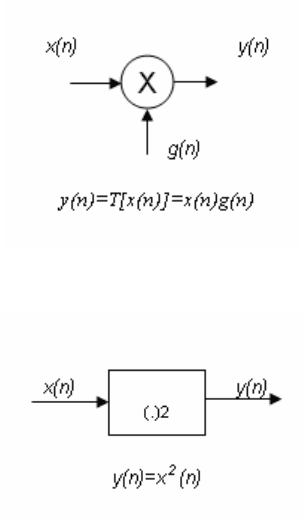
Примеры:
(а)
(b)
Рис. 2.1. (a) Пример линейной системы; (b) пример нелинейной инвариантной
к сдвигу системы.
Система на рис.2.1.(а) не является инвариантной к сдвигу поскольку
T[x(n – m)] = x(n – m)g(n), а y(n - m) = x(n – m)g(n – m).
Система на рис. 2.1.(b) нелинейная, однако является инвариантной к сдвигу,
так как
T[x(n – m)] = x
2
(n – m) и y(n – m) = x
2
(n – m).
Рассмотрим линейную систему T. При входном воздействии x(n) выход
системы y(n) c учетом (2.5) будет:
15
⎥
⎦
⎤
⎢
⎣
⎡
−==
∑
∞
−∞=k
knkxTnxTny )()()]([)(
δ
= = . (2.7)
∑
∞
−∞=
−
k
knTkx )]([)(
δ
∑
∞
−∞=k
k
nhkx )()(
Из (2.7) следует, что линейная система может быть полностью
охарактеризована ее реакцией на импульс
)(n
δ
и его сдвиг )( kn −
δ
.
)(nh
k
- отклик системы на )( kn
−
δ
в момент kn
=
. Система является
инвариантной к сдвигу, когда задержка входной последовательности
вызывает аналогичный временной сдвиг )( knx − )( kny
−
на выходе. Тогда для
и )(nh )(n
δ
откликом на )( kn
−
δ
будет )( knh
−
, и тогда
=
)(ny
∑
∞
−∞=
−
k
knhkx )()( (2.8)
Это выражение имеет важнейшее значение в цифровой обработке сигналов,
представляет собой сумму парных произведений и называется сверткой.
При цифровой обработке количество слагаемых в (2.8) должно быть
ограничено. Удобно это ограничение связывать не с протяженностью
сигнала, как в (2.8), а с протяженностью импульсной реакции фильтра,
которая, как правило, меньше протяженности сигнала. Заменив в (2.8)
индексы суммирования и введя ограничения по количеству отсчетов
импульсной характеристики, получим конечномерное приближение к
непрерывному фильтру
=
)(ny
∑
−
−=
−
1
0
)()(
N
k
khknx (2.9)
Эта формула называется формулой цифровой свертки и является базовой
вычислительной процедурой в цифровой обработке сигналов.
Операция свертки лежит в основе цифровых фильтров (КИХ и БИХ
фильтров), вычисления авто- и взаимно корреляционных функций,
умножения многочленов, интегральных преобразований (преобразование
Фурье, вейвлет-преобразования и т.п.) и многого другого.
16

2.3. Передаточные функции
Помимо импульсной и частотной характеристики, представляющей
импульсную характеристику в частотной области, линейную систему удобно
представлять с помощью передаточной функции, которая базируется на
методе z-преобразования [3].
Одностороннее z-преобразование дискретной последовательности x(nT),
n=0,1,2,…, определяется рядом (Гольденберг и др. 1990):
∑
∞
=
−
==
0
)()}({)(
n
n
znTxnTxZzX , (2.10)
где
- комплексная переменная. То есть z-преобразование
представляет собой интегральное преобразование, где базисной функцией
является z. Для равномерной сходимости ряда (2.10) достаточно, чтобы
βα
ϕ
jrez
j
+==
∞<=
∑∑
∞
=
−
∞
=
−
00
)()(
n
n
n
n
rnTxznTx
.
Область сходимости определяется кругом радиуса R в z-плоскости, вне
которого ряд (2.10) сходится.
Основные свойства z-преобразования:
1. Линейность. Для последовательностей x
1
(nT) и x
2
(nT) z –
преобразования соответственно X
1
(z) и X
2
(z), а а
1
и а
2
- постоянные и
независящие от n коэффициенты, тогда y(nT)= a
1
x
1
(nT)+a
2
x
2
(nT) имеет
z-преобразование Y(z)=a
1
X
1
(z)+a
2
X
2
(z).
2. Сдвиг последовательности. Если Z{x(nT)}=X(z) и x(nT)=0 при n<0, то
y(nT)= x(nT-mT) имеет z-преобразование Y(z)=Z{x(nT-mT)}=z
-m
X(z).
3. Свертка последовательностей. Свертка x
1
(nT ) и x
2
(nT) во временной
области:
∑∑
==
−=−=
n
m
n
m
mTxmTnTxmTnTxMTxnTy
0
212
0
1
)()()()()( может быть
представлена в z-области в виде произведения
. )()()(
21
zXzXzY ×=
(Все это очень похоже на преобразование Фурье.)
17

Для того чтобы перейти из z-области во временную необходимо выполнить
обратное z-преобразование, которое ставит в соответствие функции
комплексной переменной X(z) решетчатую функцию x(nT)=z
-1
{X(z)}. Эта
последовательность определяется как
,)(
2
1
)(
1
dzzzX
j
nTx
c
n
∫
−
=
π
(2.11)
где C-контур в области сходимости X(z)z
n-1
, который охватывает начало
координат в z-плоскости. Интеграл (2.11) вычисляют при помощи теоремы о
вычетах. x(nT) есть сумма вычетов подынтегрального выражения в полюсах в
области внутри контура C:
∑
−
=
k
k
z
n
z
zzXsnTx ))((Re)(
1
Более удобно вычислять обратное z-преобразование через разложение на
простые дроби. Для этого X(z) должно быть рациональной функцией, тогда:
∑
=
−
−
=
n
k
k
k
z
zX
1
1
1
)(
α
β
.
При этом, используя свойство линейности и сходимость ряда можно
привести данное выражение к виду:
∑
=
=
N
k
n
kk
nTx
1
)()(
αβ
. (2.12)
Передаточной функцией линейной дискретной системы H(z) называют
отношение выходной последовательности, представленной в z-области (z-
образ) к входной последовательности в z-области:
)(
)(
)(
zX
zY
zH =
.
Если применить z-преобразование к решению линейных разностных
уравнений вида
, которыми описываются
линейные дискретные фильтры, то получим
∑∑
−
=
−
=
−=−
1
0
1
0
)()(
M
m
N
k
km
kTnTxbmTnTya
∑∑
−
=
−
−
=
−
=
1
0
1
0
)()(
N
k
k
k
M
m
m
m
zXzbzYza
.
18
Поскольку Y(z)=H(z)X(z), то
∑
∑
−
=
−
−
=
−
+
=
1
1
1
0
1
)(
M
m
m
m
N
k
k
k
za
zb
zH (2.13.)
есть передаточная функция рекурсивного цифрового фильтра, и
∑
−
=
−
=
1
0
)(
N
k
k
k
zbzH (2.14.)
- передаточная функция нерекурсивного фильтра.
2.4. Структурные схемы дискретных фильтров
Алгоритмы рекурсивных и нерекурсивных фильтров могут быть
представлены в виде структурных схем построенных на трех операциях:
алгебраического сложения, умножения сигнала на константу и задержки
сигнала на один интервал дискретизации.
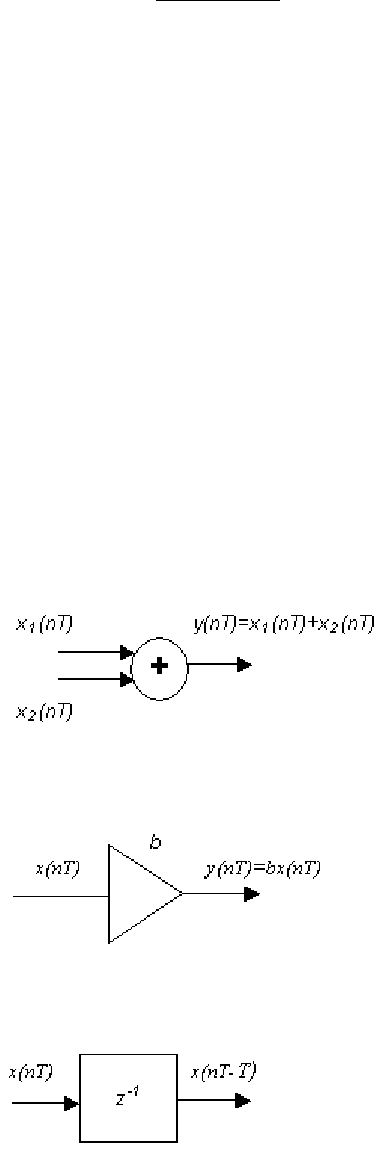
Графически эти операции изображаются в следующем виде:
Суммирование.
Умножение на коэффициент.
Задержка на такт.
Рассмотрим наиболее часто используемые структурные схемы фильтров.
19
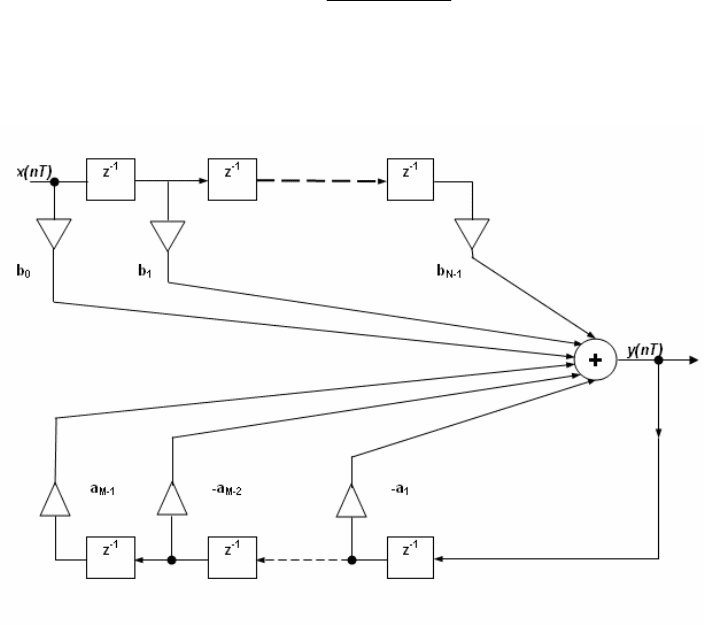
Прямая форма структурной схемы реализуется непосредственно по
разностному уравнению
∑∑
==
−=−=
n
m
n
m
mTxmTnTxmTnTxMTxnTy
0
212
0
1
)()()()()( ,
или по передаточной функции
∑
∑
−
=
−
−
=
−
+
=
1
1
1
0
1
)(
M
m
m
m
N
k
k
k
za
zb
zH
и имеет вид представленный на рис.2.2.
Рис.2.2. Прямая форма структурной схемы рекурсивного фильтра.
Прямая каноническая форма. Канонической называют структурную форму
фильтра, в которой содержится минимальное число элементов задержки.
20
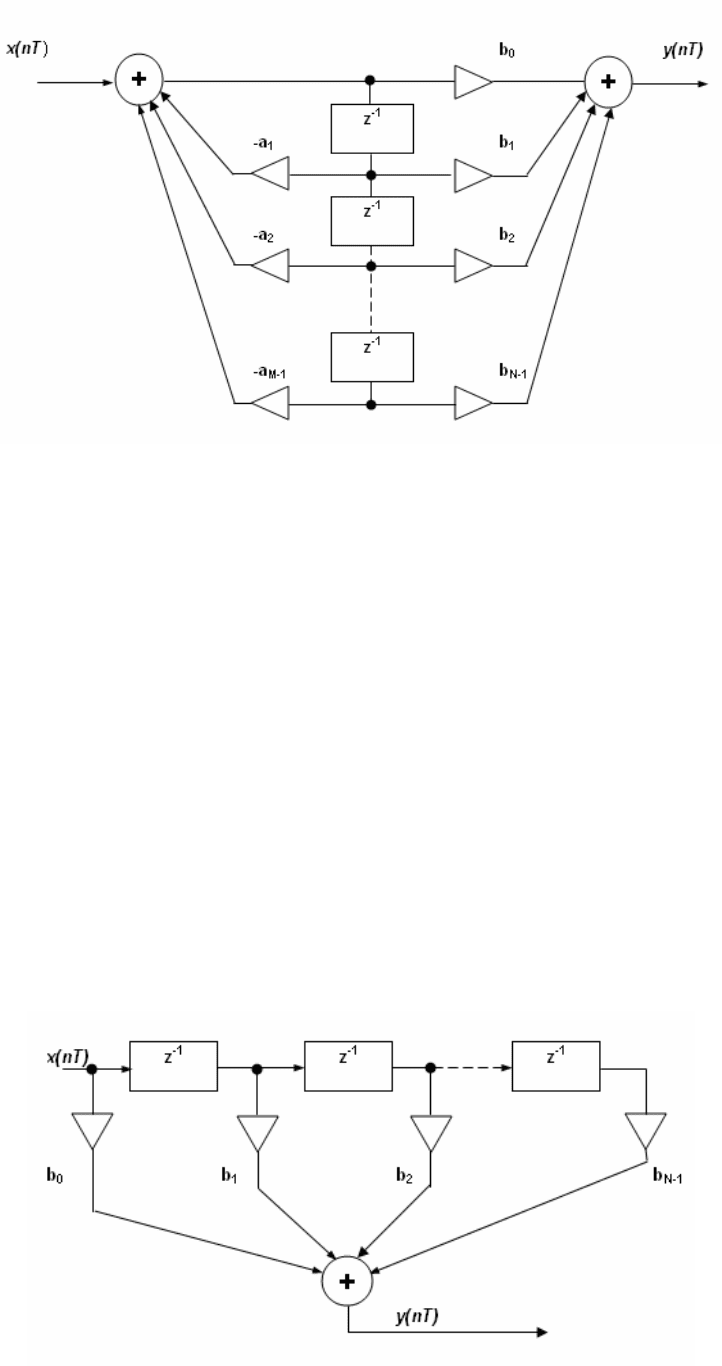
Рис.2.3. Каноническая форма
Структурные схемы нерекурсивных фильтров.
Прямая форма является непосредственной реализацией передаточной
характеристики нерекурсивного фильтра
∑
−
=
−
=
1
0
)(
N
k
k
k
zbzH
или соответствующего разностного уравнения
∑
−
=
−=
1
0
)()(
N
k
k
kTnTxbnTy
;
прямая форма содержит N-1 элементов задержки, N – умножителей и
сумматор с N – входами. Другое название такой схемы – трансверсальный
фильтр, или фильтр с многоотводной линией задержки.
Рис.2.4. Структурная схема нерекурсивного фильтра.
21
Соединение фильтров.
Эквивалентными называют фильтры, у которых при нулевых начальных
условиях и одинаковых входных сигналах выходные сигналы тоже
одинаковы.
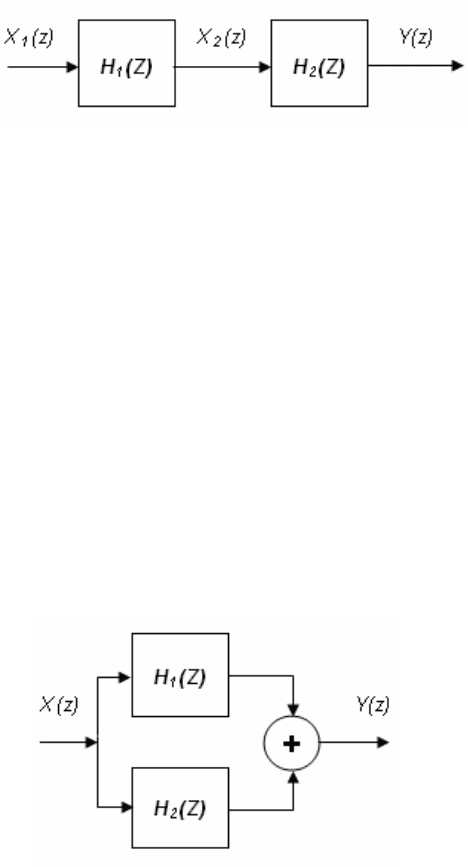
1. Последовательное соединение: выходной сигнал предшествующего
фильтра является входным для последующего (рис.4.).
Рис.2.5. Последовательное соединение фильтров.
Для такого соединения эквивалентная передаточная функция H
э
(z) равна
произведению передаточных функций H
1
(z) и H
2
(z), то есть
(
)
zzz
H
H
H
э 21
)()(
×
= или (2.15). )()(
1
zz
P
l
lэ
HH
∏
=
=
2. Параллельное соединение: входной сигнал во всех фильтрах один и тот
же, а выходной сигнал равен сумме выходных сигналов отдельных фильтров
(рис.5.).
Рис.2.6. Параллельное соединение фильтров.
Для параллельного соединения фильтров эквивалентная передаточная
функция равна сумме передаточных функций отдельных фильтров:
(
)
zzz
H
H
H
э 21
)()( += или (2.16). )()(
1
zz
P
l
lэ
HH
∑
=
=
Следует отметить еще один вариант соединения фильтров:
22