Голованов В.А. Гироскопическое ориентирование: Учеб. пособие
Подождите немного. Документ загружается.


3.LЗаписывают в журнал наблюдений (табл.5) время и отсчет
N
1
, соответствующие первой точке реверсии. Прибавляя к времени
первой точки полпериода (на широте Петербурга период колебаний
ЧЭ равен 7Lмин), определяют приблизительное время второй точки
реверсии. Это время необходимо для того, чтобы заранее
подготовится к наблюдению следующей точки реверсии.
4.LПосле первой точки реверсии дважды измеряют и
записывают в журнал ориентирное направление N
к
– отсчет по
горизонтальному кругу угломерной части, соответствующий
положению визирной оси зрительной трубы, при котором средний
штрих шкалы «40» совмещен с неподвижным биссектором.
Расхождение между этими отсчетами не должно превышать 6.
5.LНе позднее чем за 40Lс до начала второй точки реверсии
начинают отслеживать ЧЭ наводящим винтом теодолита (см.
пунктыL1-2).
6.LПосле второй точки реверсии N
2
необходимо убедиться в
том, что значение угла
к
по абсолютной величине не превышает 2°:
к
= N
к
– N
cр
,
где
2/
ккк
NNN
;
2/
21ср
NNN
.
Если
к
LL2, необходимо развернуть в соответствующую
сторону корпус гироприставки рукояткой ручного привода и взять
последующие четыре точки реверсии ЧЭ.
7.LПосле третьей N
3
и четвертой N
4
точек реверсии измеряют
и записывают в журнал примычное направление на второй пункт
стороны. Примычное направление измеряется дважды при двух
положениях трубы. Примычное направление может быть измерено и
после окончания наблюдений точек реверсий.
8.LПо ходу наблюдений производят необходимые
вычисления и сравнивают с установленными допусками.
Допустимые значения параметров и разностей двух направлений
следующие:
Угол отклонения нулевого положения подвеса, деления шкалы 40
Разность промежуточных средних (при определении нуля
торсиона), деления шкалы 1
61

Максимальный угол приведения оси гирокомпаса, град 20
Ориентирный угол
к
, град. 2
Наибольший размах (двойная амплитуда) гармонических
колебаний ЧЭ, град. 6
Разность двух промежуточных средних (при определении
положения равновесия ЧЭ), с 30
Разность двух определений гироскопического азимута стороны 3m
г
Разность двух измерений примычного направления, с 30
9.LВо всех случаях пропуска одной из четырех
последовательных точек реверсий ЧЭ необходимо наблюдать
дополнительно лишь одну – пятую точку, так как независимо от
нарушения последовательности четыре точки реверсии позволяют
вычислить два значения отсчета положения динамического
равновесия (см. приложение).
10.LУбедившись, что полученные результаты
соответствуют установленным допускам, арретируют ЧЭ,
повернув рукоятку арретира против часовой стрелки до
срабатывания фиксатора. Выключают блок электропитания,
повернув ключ в положение «Отключено».
8. ВЫЧИСЛЕНИЕ ГИРОСКОПИЧЕСКОГО АЗИМУТА
СТОРОНЫ
Все записи и вычисления при гироскопическом
ориентировании выполняют в специальном журнале (табл.5).
1. Положение равновесия ЧЭ (при включенном гиромоторе)
вычисляют по формулам
4/2
3210
NNNN
;
4/2
4320
NNNN
;
(1)
2/
000
NNN
,
m
г
– средняя квадратическая погрешность единичного определения
гироскопического азимута.
62

где N
1
– N
4
– отсчеты по угломерной части в точках реверсии ЧЭ.
2. Определяют поправку за закручивание подвеса
D
кт
, (2)
где ψ
т
– отклонение нулевого положения подвеса от начального
положения корпуса; ψ
к
– ориентирный угол; D – добротность
гирокомпаса.
Отклонение нулевого положения подвеса от начального
положения корпуса
Ψ
т
= t(n
0
– n
к
), (3)
где t – цена деления шкалы, устанавливается по паспорту прибора; n
0
,–
нулевое положение торсионного подвеса; n
к
– отсчет по шкале
автоколлимационной системы, соответствующий положению
неподвижного биссектора при определении нуля торсиона (обычно
n
к
L=L40).
Ориентирный угол
Ψ
к
= N
к
– N
0
,
где N
к
– отсчет по лимбу угломерной части гирокомпаса,
соответствующий положению визирной оси зрительной трубы, при
котором средний штрих («40») шкалы в поле зрения
автоколлимационной трубы совмещен с неподвижным биссектором,
2/
ккк
NNN
.
3. Определяют гироскопический азимут стороны по формуле
Г = N – N
0
+ , (4)
где N – примычное направление; N
0
– положение равновесия ЧЭ; –
поправка за закручивание.
9. ОПРЕДЕЛЕНИЕ ДИРЕКЦИОННОГО УГЛА СТОРОНЫ
ПОДЗЕМНОГО ПОЛИГОНА ГИРОКОМПАСОМ МВТ2
63

Гироскопическое ориентирование начинается с определения
«местной» поправки гирокомпаса. Для этого определяют
гироскопический азимут стороны с известным дирекционным
углом. Согласно инструкции [5], минимальная длина такой стороны
должна быть не менее 250Lм. Эта поправка может быть определена
двумя способами.
В том случае, если ориентирование производится каждый раз
на новом месте, поправку определяют дважды перед спуском в
шахту и один раз – после выполнения гироскопического
ориентирования горных выработок. Если все три значения
гироскопического азимута не отличаются друг от друга более чем 2',
выводится среднее значение гироскопического азимута исходной
стороны Г
0
. Поправка гирокомпаса вычисляется по формуле
м
=
0
– Г
0
, (5)
где
0
– дирекционый угол исходной стороны.
Второй способ определения поправки применяют, как
правило, при сравнительно большом объеме разовых работ на одном
объекте. Поправку определяют методом скользящего среднего – как
среднее арифметическое из четырех определений, включая
контрольные, часть из которых непосредственно предшествовала
ориентированию стороны, а другая часть получена после
выполнения ориентирования. При первичном определении текущей
поправки два-три определения производят до определения азимутов
ориентируемых сторон и одно-два – после.
В дальнейшем после каждого этапа работ проводят одно
контрольное определение, а значение текущей поправки
вычисляют как среднее из четырех последних определений,
включая последнее контрольное
к
. Пример вычисления текущей
поправки приведен в табл.6.
Таблица 6
Ведомость вычисления текущей поправки
Исходная сторона – XI-XII,
0
= 240 05 07
Дата Номер пуска Г
0
к
=
0
– Г
0
т
64
11.07.04 15 2411054 –10547 –
12.07.04 16 241 11 40 –1 06 33 –
14.07.04 18 241 11 03 –1 05 56 –
16.07.04 19 241 11 50 –1 06 43 –10615
19.07.04 23 241 11 20 –1 06 13 –1 06 21
03.09.04 27 241 11 34 –1 06 27 –1 06 20
При вычислении разовой или текущих поправок может быть
использована только такая серия единичных определений поправки,
в которой разность значений любых двух единичных поправок не
превышает 3m
г
.
При несоблюдении установленного допуска при
определении разовой поправки гироскопические азимуты исходной
и всех ориентируемых сторон в шахте определяются заново.
При несоблюдении установленного допуска при
определении текущей поправки сразу после контрольного
определения производят два дополнительных определения. Если
дополнительные контрольные определения вместе с ранее
полученными значениями поправки будут соответствовать
установленному допуску, то определение, вышедшее за пределы
допуска, при вычислении текущей поправки не учитывают. Если
дополнительные контрольные определения вместе с ранее
полученными значениями поправки не будут соответствовать
установленному допуску, то пуски на ориентируемых сторонах,
выполненные после предыдущего определения, в расчет не
принимают.
В горных выработках гироскопический азимут определяемой
стороны вычисляют 2Lраза. Минимальная длина определяемой
стороны должна быть не менее 50Lм. Значение дирекционного угла
стороны вычисляется по формуле
= Г +
м
+
у
, (6)
где
у
– поправка за разность сближения меридианов.
Порядок вычисления дирекционных углов сторон
подземного полигона приведен в примере.
65
1. Вычисляют и записывают в формуляр поправку
гирокомпаса МВТ2 №L056 на стороне 21-22:
0
Г
13°0140 Журнал 3, с. 4, 5
0
Г
13 01 34 Журнал 3, с. 10
Г
0
13 01 37
0
11 27 52 Исходные данные
Г
0
13 01 37
м
–1 33 45
Здесь
0
Г
– средний гироскопический азимут исходной
стороны, определенный до спуска в шахту;
0
Г
– гироскопический
азимут стороны, определенный после работ в горных выработках; Г
0
– среднее значение гироскопического азимута исходной стороны,
Г
0
= (
0
Г
+
0
Г
)/2; (7)
0
– дирекционный угол исходной стороны; δ
м
– поправка
гирокомпаса, δ
м
= α
0
Г
0
.
2.LОпределяют поправки за разность сближения меридианов δ
γ
:
Пункт 22-31 22-YI
Y
0
, км 4,6
Y, км 5,2 4,4
Y
0
– Y, м –0,6 +0,2
53,6
–032 +011
Здесь Y
0
и Y – ординаты точек установки гирокомпаса
соответственно на исходной и определяемой стороне; μL=L32,23tgφ;
φ – широта местности.
Тогда
δ
γ
= μ(Y
0
– Y). (8)
3.LВычисляют дирекционные углы сторон подземной
маркшейдерской сети
66
Сторона 31-32 YI-YII
Г 17°4411 339°04'12
Г 17 44 45 339 03 42
Г 17 44 28 339 03 57
м
–1 33 45 –1 33 45
Г +
м
16 10 43 337 30 12
–0 00 32 +0 00 11
16 10 11 337 30 23
М
0 00 17 0 00 15
Здесь Г и Г гироскопические азимуты ориентируемых
сторон; Г – среднее значение гироскопического азимута сторон,
Г = (Г + Г)/2; (9)
– дирекционный угол ориентируемой стороны; М
– погрешность
определения дирекционного угла,
22
0
2
1
ddM
; (10)
d
0
=
0
Г
–
0
Г
; d = Г
– Г
. (11)
10. МАРКШЕЙДЕРСКИЙ ВЗРЫВОБЕЗОПАСНЫЙ
ГИРОКОМПАС МВГ1
В 1991Lг. на горных предприятиях нашей страны появился
гирокомпас МВГ1 – результат совместной работы ВНИМИ и
венгерского предприятия «МОМ». Гирокомпас МВГ1 имеет
современный дизайн и рациональную компоновку узлов и блоков
(рис.14), обладает хорошими характеристиками для приборов этого
класса 2:
Средняя квадратическая погрешность измерения
горизонтального угла теодолитом ТеЕ6, с, не более 7
Увеличение зрительной трубы, крат 18
Средняя квадратическая погрешность определения азимута,
с, не более 30
Продолжительность пуска гирокомпаса (на широте 60), при 15
67
четырех точках реверсии, мин, не более
Количество пусков от заряженной аккумуляторной батареи,
не менее 12
Продолжительность измерения нулевого положения подвеса
при четырех точках реверсии, мин, не более 4
Период свободных колебаний, с, не менее 90
Период прецессионных колебаний на широте 60, мин 2,9
Условия эксплуатации:
Температура окружающей среды, С От 10 до 35
Широта места установки, град, не выше 70
ОтносительнаяLвлажностьLвоздухаL(сLконденсацией
влаги), 982
Допускаемая концентрация метана, , не более 2
Уровень защиты блока РВ1В
Масса, кг, не более:
гироблока 9
гироблока в футляре 12
угломерной части 3
угломерной части в футляре с принадлежностями 6
штатива 6
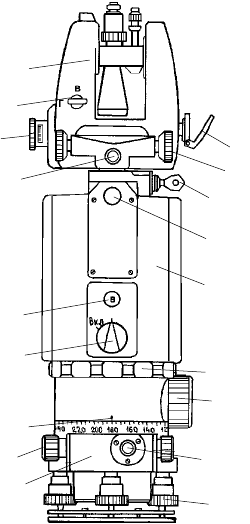
Гирокомпас МВГ1
выполнен в виде двух
конструктивных модулей:
гироблокаL14 (рис.14) и
угломераL9, каждый из которых
при транспортировке
размещается в отдельном
футляре. В комплект гирокомпаса
входят также оптический центрир
типа К814 и стандартный штатив
для теодолита.
Гироблок состоит из двух частей: взрывобезопасного
поворотного корпусаL14 и неподвижной подставкиL1 (рис.14),
которые связаны между собой механизмом ручного привода.
Рис.14. Гирокомпас МВГ1
1 – подставка; 2 – рукоятка ручного привода;
3 – шкала подставки; 4 – включатель блока
питания; 5 – блок светодиодов; 6 –
закрепительный винт угломерной части; 7 –
барабан оптического микрометра; 8 –
переключатель оптического микрометра; 9 –
угломерная часть; 10 – зеркало подсветки; 11
– наводящий винт угломерной части; 12 –
блокировочный винт; 13 – защитное стекло
гироблока; 14 – гироскопическая часть
(внешний корпус); 15 – соединительное
кольцо; 16 – рукоятка арретирного
устройства; 17 – закрепительный винт
подставки; 18 – подъемные винты подставки
68
9
8
6
4
3
2
1
18
17
14
13
16
7
10
12
5
11
15
Граница раздела между этими двумя частями проходит по
шкалеL3 с ценой деленияL5 (сама шкала находится на подставке).
Корпус поворачивается вокруг вертикальной оси на 360
наблюдателем с помощью двух рукояток ручного приводаL2.
Разворот поворотного корпуса относительно неподвижного может
быть определен по круговой шкале с точностью 1-2. После
выполнения операции приведения оси гиромотора в плоскость
меридиана поворотный корпус фиксируется с помощью
закрепительного винтаL17. Подставка устанавливается на головке
штатива, закрепляется становым винтом и горизонтируется с
помощью трех подъемных винтов 18.
69
В состав гироблока
также входят: арретирное
устройство, электронный
преобразователь,
аккумуляторная батарея,
магнитный экран,
блокировочный ключL12
(рис.14), призмаL15 (рис.15),
блок светодиодовL5 (см.
рис.14), включатель питания 4.
Для регулирования «Места нуля» подвеса, балансировки ЧЭ
и других работ наружный корпус гироблокаL14 (рис.14) может быть
снят. Для этого необходимо снять рукоятку арретира, отвернуть
соединительное кольцоL15, осторожно приподнять корпус и
отсоединить разъем электрического кабеля.
Арретирное устройство предназначено для жесткого
соединения ЧЭ с корпусом и состоит из арретирных втулок,
конического колеса и рукоятки арретира с конической шестеренкой.
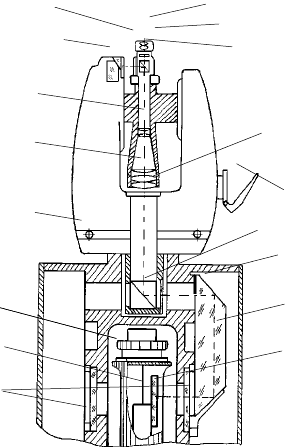
Рис.15. Оптическая схема МВГ1
1 – защитное стекло; 2 – торсионный подвес;
3 – верхний узел крепления торсионного
подвеса; 4 – шариковый опорный подшипник
осевой системы; 5 – объектив теодолита; 6 –
фокусирующая линза; 7 – блок призм подсветки
шкалы автоколлиматора; 8 – шкала; 9 – окуляр;
10 – сетка нитей; 11 – блок призм
автоколлимационной системы в ЗТ; 12 –
подсветка теодолита;
13 – блок призм автоколлимационной системы
в хвостовике теодолита; 14 – зеркало, связанное
с корпусом; 15 – трапециевидная призма АК;
16 – зеркало на ЧЭ
70
9
8
6
4
3
2
1
14
13
16
7
10
12
5
11
15
1