Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций часть 1
Подождите немного. Документ загружается.

РЛА, а также реализует вторичную обработку радиолокационной информации, хранение и выдачу
полученных результатов.
Для установки ФАР в заданное угловое направление, а также подъёма и опускания полот-
на ФАР служит система управления антенной (СУА). Эти функции могут реализовываться как по
командам, поступающим от СОУ, так и вручную.
Устройство охлаждения предназначено для поддержания заданных температурных режи-
мов отдельных узлов и блоков ФАР и передающей системы.
Необходимыми питающими напряжениями PЛA обеспечивает система вторичных источни-
ков питания (CВИП), блоки которой запитываются от системы электропитания напряжением 220 В
400 Гц.
Система функционального контроля предназначена для проверки готовности РЛК к боевой
работе и поиска неисправных элементов. Она обеспечивает контроль функционирования РЛА и
ЦВУ, а также контроль отдельных систем РЛА. .
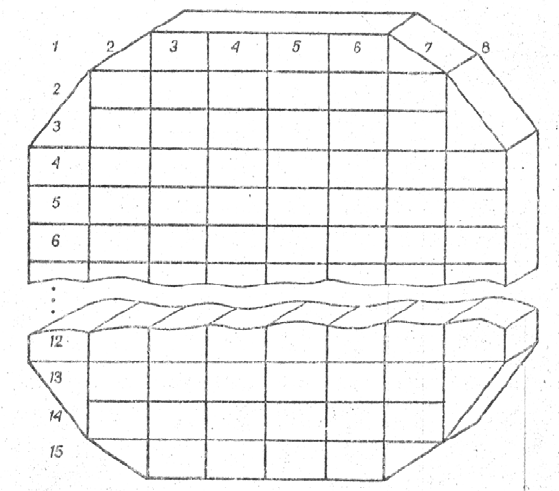
В основе построения РЛА комплекса заложены следующие принципы. Приемопередающая
антенна РЛА выполнена в виде плоской ФАР отражательного типа, состоящей из 3328 независи-
мых каналов управления (КУ), которые конструктивно объединены в 104 модуля (рис.13). Каждый
модуль содержит 32 канала управления, которые управляют фазами токов возбуждения соеди-
ненных с ними излучателем ФАР. Расстояние между центрами входящих в состав модуля излуча-
телей составляет половину длины волны. Поэтому центры излучателей конструктивно объедине-
ны в блок рупоров (рис. 14) , расположены в узлах треугольной сетки. Возбуждение ФАР осущест-
вляется моноимпульсным облучателем [17]. Входящие в состав каналов управления ФАР трех-
разрядные отражательные фазовращатели (см. рис.7) осуществляют формирование требуемого
АФР на ее раскрыве в соответствии с командами, поступающими на КУ от цифрового вычислителя
фаз (ВФ).
Рис.13
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
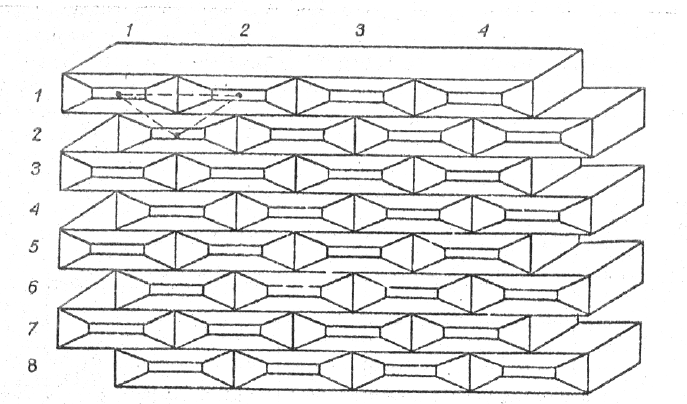
Рис.14
Формирование команд управления осуществляется в ВФ строчностолбцовым методом на
основе данных, поступающих от ЦВУ. При этом на вход ВФ от ЦВУ в виде двоичного кода посту-
пают значения двух констант для конкретного значения углового положения луча ФАР: разности
фаз между соседними элементами
в строке ΔФ
х
и столбце ΔФ
у
, определяемые в соответствии с
выражениями
ΔФ
у
= k d
y
cos Ө
У0
;
ΔФ
х
= k d
х
cos Ө
х0
;
На основе этих данных в ВФ происходит вычисление значений фазовых сдвигов для каж-
дого фазовращателя ФАР.
С учетом того, что выражения (3) — (5) можно преобразовать к виду
φ
л m
= k m d
y
cos Ө
У0
= m ΔФ
у
; (9)
φ
л n
= k n d
х
cos Ө
х0
= n ΔФ
х
; (10)
φ
л m,n
= m ΔФ
у
+ n ΔФ
х
, (11)
алгоритм расчета фаз ВФ может быть описан выражением (1), где в качестве φ
нач m,n
(f) использу-
ется коэффициент коллимации, представляющий собой поправку фазы на сферичность волны об-
лучателя, зависящую от значения частоты излучаемого сигнала f и определяемую в соответствии
с выражением
φ
нач m,n
(f) = k [ p – (p
2
+ x
n
2
+ y
n
2
)
1/2
, (12)
где р – расстояние от первичного облучателя до плоскости раскрыва ФАР;
Х
п
и У
п
– координаты m,n-го излучающего элемента на раскрыве.
Эта поправка вводится в ОЗУ коллимации ВФ для различных значений λ в виде набора таблиц.
Передающее устройство построено по принципу многокаскадной усилительной цепочки с
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
мощным СВЧ-клистроном в выходном усилителе мощности (см. рис. 12).
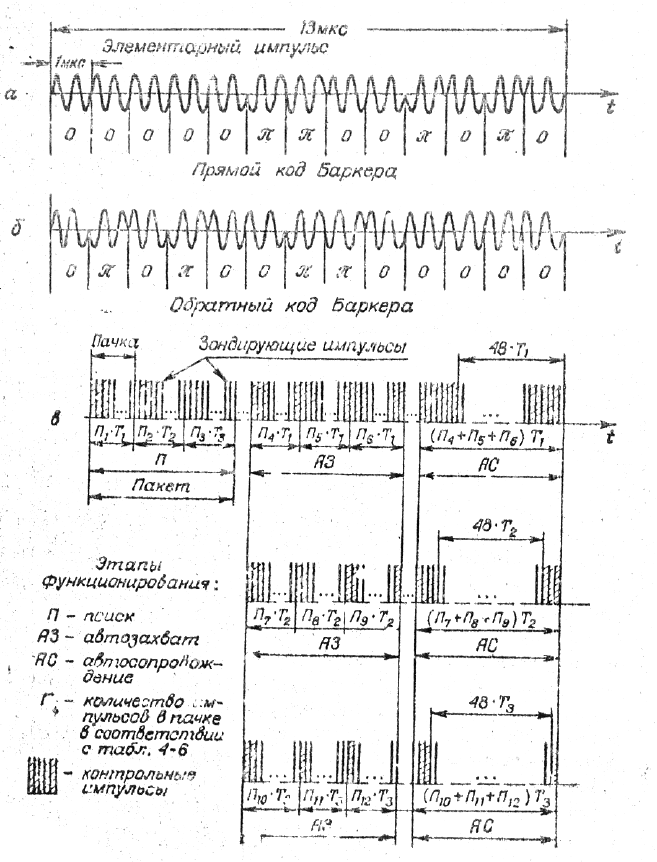
Зондирующий сигнал представляет собой радиоимпульс, фазокодоманипyлированный
(ФКМ) в соответствии с 13-позиционным кодом Баркера. Длительность излучаемого импульса со-
ставляет 13 мкс, длительность элементарного (одного из тринадцати) импульса составляет 1 мкс
(рис. 15, а). В зондирующем импульсе начальные фазы элементарных импульсов могут принимать
значения 0 или
π. При этом импульс, у которого начальные фазы принимают соответственно зна-
чения
0, 0, 0, 0, 0,
π, π, 0, 0, π , 0, π, 0,
называют ФКМ-сигналом с прямым 13-позиционным кодом Баркера, а сигнал, У которого началь-
ные фазы элементарных импульсов принимают значения
0,
π , 0, π, 0, 0, π, π, 0, 0, 0, 0,
называют ФКМ-сигналом с обратным кодом Баркера (рис. 15,б) [20].
Рис. 15
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Использование сигналов с обратным кодом позволяет улучшить электромагнитную со-
вместимость (ЭМС) однотипных МРЛК. Вид используемого кода Баркера (прямой или обратный)
задается с пульта оператора.
Зондирующие сигналы излучаются пакетами (рис. 15, в). Каждый пакет (зондирование) на
этапах поиска и автозахвата состоит из трех пачек импульсов. На этапе автосопровождения зон-
дирующий сигнал представляет собой пачку импульсов. Однако количество импульсов в ней в три
раза превышает количество импульсов в пачках, используемых на этапах автозахвата и поиска.
Предусматривается управление количеством импульсов в пакете, величиной периода по-
вторения импульсов, несущей частотой излучения. Перечисленные параметры устанавливаются
ЦВУ на каждое новое зондирование.
На этапе поиска ОН зондирующий сигнал представляет собой пакет, состоящий из трех па-
чек импульсов, следующих с соответствующими периодами повторения — Т
1
, Т
2
и Т
3
. На этапах
автозахвата и автосопровождения период повторения импульсов остается постоянной величиной,
принимающей одно из возможных значений Т
1
, Т
2
или Т
3
(рис. 15, в).
Предусматривается по два(минимальных и максимальных) численных значения для каждо-
го из периодов Т
1
, Т
2
, Т
3
. Для обнаружения ОН на дальностях до 25 км их облучение осуществля-
ется с минимальными периодами повторения импульсов (так называемый «Частый» режим излу-
чения), а на дальностях до 36,5 км — с максимальными периодами повторения (режим "Редкий").
3ондирующие СВЧ-импyльсы вырабатываются в передающей системе путем двойного пе-
реноса ФКМ-сигнала с частотой f
пч3
= 24 МГц, формируемого задающим генератором и формиро-
вателем ФКМ-сигнала, на литерную частоту с последующим усилением по мощности. Те же блоки
формируют и контрольные сигналы (так называемые пилот сигналы), которые не излучаются в
пространство и подаются через СФК и преобразователь АВС в приемную систему для осуществ-
ления функционального контроля и подстройки (калибровки) РЛА.
Приемная система включает в себя четыре идентичных канала, в которых осуществляется
тройное преобразование частоты принятого сигнала и разделение его на квадратурные состав-
ляющие.
С целью уменьшения влияния неидентичности квадратурных каналов величину подавле-
ния мешающих отражений (отражений от местных предметов, метеообразований и т.д.), активных
помех системой СПОИ в приемной системе периодически на нерабочих участках дальности произ-
водится автоматическая подстройка параметров. Для этого в первом периоде повторения каждого
пакета зондирующих импульсов СПОИ осуществляет выравнивание коэффициентов передачи
квадратурных каналов, а во втором - проводится грубая подстройка выходных видеоусилителей
всех каналов приемной системы. В это же время СПОИ осуществляет точную подстройку "нулей"
фазовых детекторов во всех каналах приемной системы.
Система первичной обработки информации обеспечивает спектральное разделение по-
лезных сигналов, пассивных и медленно движущихся помех, полученное на основе использования
быстрого преобразования Фурье (БПФ) [27], а также обнаружение ОН по энергетическому признаку
и радиальной скорости перемещения. Кроме того, СПОИ позволяет выделять сигналы ОН на фоне
несинхронных импульсных и активных помех.
Обработка отраженного сигнала, усиленного приемной системой и предварительно преоб-
разованного в цифровой код в аналогово–цифровом преобразователе (АЦП), входящем в состав
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
СПОИ, производится цифровым фильтром сжатия (ЦФС в блоке БПФ - см. рис. 12), в котором
ФКМ-сигнал сжимается во времени до длительности элементарного импульса (1 мкс). Затем про-
цессор блока БПФ производит когерентное накопление отраженных сигналов.
При наличии в отраженном сигнале шумовой или несинхронной импульсной помехи (НИП)
в СПОИ производится ее компенсация цифровым квадратурным автокомпенсатором (компенсатор
НИП - см.рис. 12). Наличие НИП определяется по оценке величины корреляции сигналов на выхо-
де основного и дополнительного каналов приемника, осуществляемой в автокомпенсаторе (АК)
помех. Для компенсации используется сигнал той же помехи, принятый по дополнительному кана-
лу, включающему в себя антенну автокомпенсатора и дополнительный канал приемной системы.
Наведение антенны АК на источник помех, а также включение и выключение· АК осуществляется
по командам с пульта оператора РЛК.
Выделение сигнала движущегося ОН на фоне сигналов помех, отраженных от неподвиж-
ных объектов, основано на различиях в их спектрах и производится СПОИ с помощью метода бы-
строго преобразования Фурье (БПФ) [27].
Излучаемый сигнал представляет собой периодическую последовательность импульсов,
поэтому его спектр представляет собой совокупность спектральных линий, смещенных относи-
тельно друг друга на величину, обратно пропорциональную периоду повторения импульсов. При
этом спектр сигналов пассивных помех группируется в области частот, приближающихся к спек-
тральным линиям излучаемого сигнала. Сигналы движущихся ОН имеют спектр, состоящий из от-
дельных линий, которые смещены относительно спектральных линий зондирующего сигнала на
величину, равную частоте Доплера. Различие полезных сигналов и помех возможно в случае, если
спектральные линии сигналов от движущихся ОН находятся в области частот, где уровень спек-
тральных составляющих помех значительно меньше уровня полезного сигнала.
Для улучшения подавления помеховых сигналов в РЛК применен метод весовой обработки
сигналов [28], позволяющий уменьшить уровень боковых лепестков АЧХ согласованного фильтра,
реализованного на основе БПФ.
Система первичной обработки информации работает в режимах:
"Поиск" (П), "Автозахват" (АЗ), "Автосопровождение" (АС), а также в режиме "Функциональ-
ный контроль" (ФК). Распределение временных интервалов в этих режимах приведено на рис.15, в
(заштрихованные периоды повторения зондирующих импульсов в СПОИ не обрабатываются).
В режиме "Поиск" СПОИ обрабатывает информацию, поступающую только по суммарному
и дополнительному каналам приемной системы от всего рабочего участка дальности.
В режимах АЗ и АС система обрабатывает информацию о находящихся в заданном вре-
менном интервале (в стробе сопровождения, назначаемом ЦВУ) ОН. Информация поступает от
суммарного (канал ∑ ) и разностных (угломестного Δε и азимутального Δα ) каналов приемника.
Параметры обнаруженных сигналов из СПОИ через систему сопряжения поступают на
ЦВУ, а также в виде обнаруженных отметок на индикатор РМО системы отображения и управле-
ния.
В ЦВУ по результатам поступившей информации производится оценка координат цели в
сферической системе координат.
Переход СПОИ из режима "Поиск" в режим АЗ, а затем в режим АС происходит автомати-
чески без участия оператора.
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
При обнаружении полезного сигнала расположенным в СПОИ обнаружителем типа "дви-
жущееся окно" производится сравнение смеси (полезный сигнал + шум) на выходе фильтра БПФ с
пороговым уровнем. Этот уровень выбирается с учетом обеспечения вероятности ложной тревоги
порядка F = 10
-5
.
В указанном типе обнаружителя для принятия решения о наличии или отсутствии сигнала
от ОН в l -м дискрете дальности его амплитуда сравнивается с амплитудами сигналов двух сосед-
них дискретов (т.е. l -2, l -1,…, l +1, l +2). Затем амплитуда сигнала l +1-гo дискрета сравнивается с
амплитудами l +1-2, l+1-1,…, l +1+1, l +1+2) и т. д. Таким образом, происходит последовательный
сдвиг амплитудной выборки сигнала, т.е. движение окна по дальности с целью определения номе-
ра дискрета дальности с максимальным уровнем сдвига.
Для селекции медленно движущихся пассивных помех (гидрометеоры, дипольные отража-
тели) используется обнаружитель по радиальной скорости, позволяющий получить перестраивае-
мую зону режекции по радиальной скорости.
П р и н ц и п о б н а р у ж е н и я сигналов по радиальной скорости состоит в следующем.
При поиске ОН зондирование каждого углового направления производится тремя пачками импуль-
сов, каждая из которых имеет свою частоту следования (рис.I5,в). Отклики каждого из шестнадцати
фильтров БПФ на отраженный сигнал будут отличаться в зависимости от частоты следования им-
пульсов. на основе таких откликов для каждой частоты следования к каждого фильтра определя-
ется характеристика контраста В:
B = 2X
k1
/ X
k2
+ X
k3
, (13)
где X
k1
— отклик k-гo фильтра на первой частоте следования;
X
k2
— отклик k-гo фильтра на второй частоте следования;
Х
kз
— отклик k-ro фильтра на третьей частоте следования.
Говоря другими словами, каждый из 16 спектральных отсчетов принятого сигнала на пер-
вой частоте нормируется на среднее значение одноименных отсчетов для других частот следова-
ния в соответствии с выражением (13). Полученные таким образом величины сравниваются с по-
роговым значением для данной частоты следования, хранящимся в запоминающем устройстве
обнаружителя СПОИ и зависящим от требуемой зоны режекции. Затем выбирается максимальный
отсчет из тех, для которых полученные величины превышают порог.
Аналогичные операции производят для второй и третьей частот следования. Результаты
сравнения подвергаются обработке в соответствии с критерием ,"2 из 3", т.е. при наличии превы-
шения установленных порогов не менее чем на двух частотах следования из трех принимается
решение о наличии ОН (зона режекции задается оператором).
В режиме ФК СПОИ переходит в автономный режим, при котором производится независи-
мый тестовый контроль каждого в отдельности блока системы. Результаты контроля поступают в
ЦВУ И СОУ.
Очередность обслуживания обнаруживаемых СПОИ ОН определяется ЦВУ, которое осу-
ществляет через систему сопряжения управление режимами работы РЛА. По командам ЦВУ вхо-
дящий в состав системы сопряжения блок управления (см. рис. 12) осуществляет управление ре-
жимами работы передающей и приемной систем, а также считывание кодов продольного и попе-
речного наклона ФАР с соответствующих датчиков.
Управление включением, выключением и режимами работы изделия, вывод. антенны из
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
походного положения в рабочее и обратно производится системой отображения и управления, ап-
паратура которой образует рабочее место оператора (РМО) и рабочее место командира (РМК).
На экране индикатора PЛС кроме радиолокационной обстановки в секторе обзора отобра-
жается также сервисная информация. Радиолокационная обстановка в секторе обзора индициру-
ется на экране индикатора типа В (азимут - дальность). Сервисная информация представляется в
буквенно-цифровом виде и выводится на экран индикатора при установке различных режимов ра-
боты РЛА.
Управление режимами отображения информации на экране индикатора РМО, ее считыва-
ние, обмен информацией РМО с ЦВУ, а также прием контрольной информации, пocтупающей с
РЛА, осуществляется специальным процессором РМО.
Аппаратура PМК обеспечивает отображение информации, циркулирующей между комплек-
сом и внешними абонентами, ввод и корректировку этой информации, управление режимами ин-
формационных обменов с периферийными устройствами.
Кроме того, в состав системы СОУ входит блок СНР-66 (планшет), который обеспечивает
отображение точек вылета (падения) снарядов в виде световых меток, проецируемых на топо-
графическую карту.
Обработка информации, поступающей от РМК и датчиков, размещенных в различных сис-
темах PЛК, осуществляется ЦВУ.
Формирование команд управления РЛА в различных режимах работы и увязка их во вре-
мени производится с и н х р о н и з а т о р о м по командам, поступающим от ЦВУ. Таким обра-
зом, синхронизатор обеспечивает необходимые временные характеристики работы РЛА.
Система функционального контроля, основная часть аппаратуры которой в виде отдельных
устройств размещена практически во всех системах РЛА, осуществляет:
последовательный контроль блоков и систем, а также контроль их взаимодействия в авто-
матическом и автоматизированном режимах работы СФК;
более детальный контроль отдельных блоков и систем, неисправность которых обнаружи-
лась в результате проведения автоматического (либо автоматизированного) контроля, в полуав-
томатическом режиме работы СФК.
При включении аппаратуры РМО и РМК осуществляется автоматический запуск программ
контроля блоков указанных рабочих мест с засветкой результатов контроля на индикаторах РМО и
PМК.
Для калибровки приемной системы с целью исключения влияния неидентичности коэффи-
циентов передачи фазовых длин моноимпульсных каналов на точность измерения угловых коор-
динат используется контрольный сигнал, формируемый в передающей системе аналогично зонди-
рующему импульсу, но сдвинутый относительно его по оси времени и соответствующий дальности
15 км. Этот сигнал от передающей системы поступает в конструктивно совмещенный с моноим-
пульсным облучателем ФАР преобразователь АВС через формирователь контрольного сигнала
(ФКС) - см. рис. 12. От преобразователя контрольный сигнал по суммарному и разностным кана-
лам поступает в приемную систему и далее в СПОИ и ЦВУ подобно сигналу, отраженному от ОН.
По результатам прохождения контрольного сигнала ЦВУ определяет поправки коэффициентов
передачи и фазовых длин, которые затем учитываются при вычислении угловых координат ОН.
При этом измерение коэффициентов передачи осуществляется во всем динамическом диапазоне
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997

входных сигналов приемной системы, т.е. при всех дискретно устанавливаемых уровнях затухания
аттенюаторов, размещенных во входных устройствах ее каналов.
Калибровка проводится таким образом, чтобы при введении затухания с помощью атте-
нюаторов приемной системы увеличивался уровень сигнала на выходе формирователя
контрольного сигнала СФК. В результате этого контрольный сигнал на выходе приёмной системы
должен находиться в середине динамического диапазона ее выходных сигналов.
Реализация автоматизированного и полуавтоматического режимов работы СФК осуществ-
ляется при переводе всего комплекса в режим функционального контроля. Объем проводимых при
этом проверок будет рассмотрен е следующем разделе.
Контроль СВЧ-мощности формируемого передатчиком сигнала может быть осуществлен в
любом режиме работы РЛК с помощью измерителя проходящей мощности (измеритель Р - см. рис.
12). Информация от измерителя поступает на РМО и отражается на экране его индикатора.
В процессе боевой работы осуществляется также контроль высоковольтного напряжения и
тока резонатора выходного усилителя мощности передающей системы. При этом аналоговые ве-
личины этих параметров оцифровываются в СВИП и поступают на индикаторное табло PМК для
контроля. Контроль несущей частоты СВЧ-сигнала производится резонансным волномером (вол-
номер – см. рис. 12).
Начальник РЛК имеет возможность осуществлять контроль текущего состояния основных
систем РЛА в процессе боевой работы путем визуального наблюдения информации на экране
индикатора РМК.
Режимы работы РЛК и их характеристика
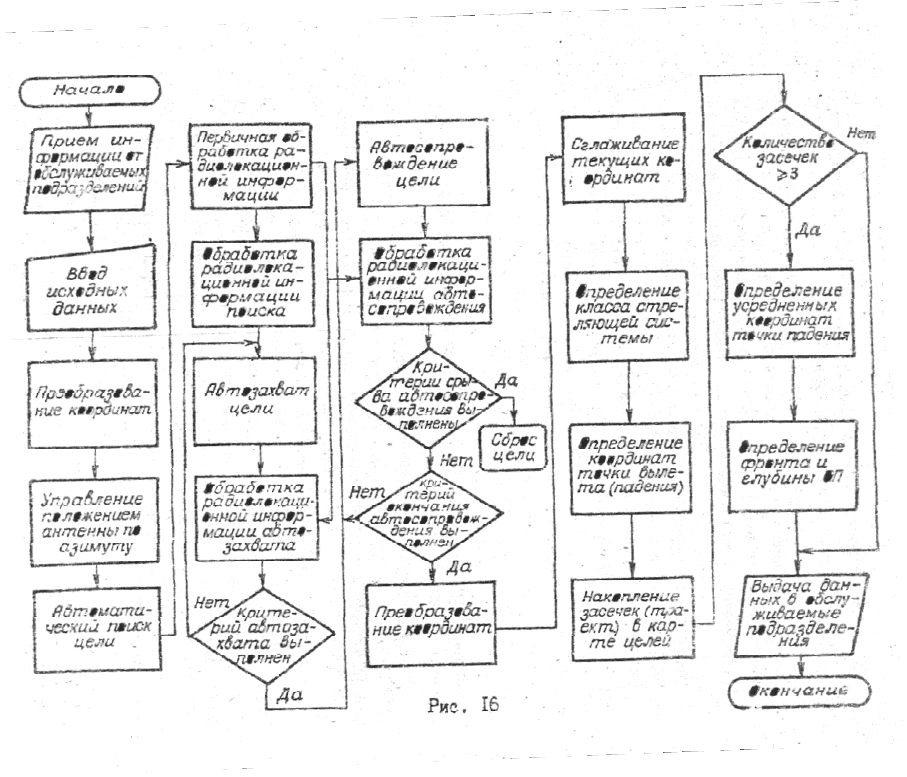
Обобщенный алгоритм функционирования комnлекса
Радиолокационный комплекс имеет следующие основные режимы работы: "Разведка" — Р;
"Контроль" — К; "Функциональный контроль" — ФК.
Указанные режимы устанавливаются с рабочего места оператора при помощи пульта
управления.
В режиме "Разведка" МРЛС выполняет следующие основные функции:
автоматический поиск и обнаружение целей в секторе обзора по азимуту ±30
о
(угол места
луча ФАР устанавливается в зависимости от выбранной позиции РЛС);
автоматический захват и сопровождение обнаруженных ОН на восходящем участке траек-
тории,
определение типа стреляющих систем;
определение координат ОП стреляющих систем;
формирование и передачу кодограмм в обслуживаемые подразделения.
В режиме "Контроль" МРЛС выполняет функции, аналогичные режиму Р. Отличие состоит
лишь в том, что поиск целей осуществляется в предварительно определенной области простран-
ства (по известным координатам обслуживаемых артиллерийских подразделений, типу огневых
средств, координатам поражаемой ОП и т.д.), а определение координат точек падения ОН произ-
водится по данным сопровождения на нисходящем участке траектории.
Режим "Функциональный контроль" предназначен для проверки: боеготовности изделия в
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
целом и отдельных его систем. При переводе РЛК в режим функционального контроля возможно
проведение автоматизированного и полуавтоматического контроля технического состояния РЛА.
В автоматизированном режиме ФK, задаваемом оператором с пульта управления РМО,
осуществляется последовательный контроль параметров следующих блоков и систем: синхрони-
затора; СПОИ; приемной системы (контролируются коэффициенты шума и коэффициенты пе-
редачи и (фазовые длины каналов); АВС (контроль технического состояния каналов управления
ФАР и ВФ).
В полуавтоматическом режиме ФК осуществляется контроль перечисленных выше систем,
который, за исключением контроля СПОИ, осуществляется аналогичным образом. В этом случае
система СПОИ при обнаружении в ней неисправности в процессе автоматизированного контроля
последовательно переводится оператором в подрежимы:
СПОИ 1 ("Поиск", частый запуск);
СПОИ 2 ("Автозахват'', частый запуск);
СПОИ 3 ("Автосопровождение", частый запуск);
СПОИ 4 ("Поиск", редкий запуск);
СПОИ 5 ("Автосопровождение", редкий запуск).
Затем, используя переключатели РАБОТА-КОНТРOЛЬ поверяемых блоков системы, оператор оп-
ределяет неисправный узел.
В качестве централизованного звена, управляющего работой изделия во всех режимах, ис-
пользуется ЦВУ, которое решает в режимах Р и К следующие основные задачи:
прием, передача и обработка информации, циркулирующей между изделием и обслужи-
ваемыми подразделениями;
управление устройствами и системами изделия в процессе автоматического поиска, обна-
ружения, захвата и сопровождения ОН;
выдача информации на устройства СОУ (индикаторы, планшет и печатающее устройство);
расчет направляющих косинусов, соответствующих требуемому угловому положению луча
ФАР;
распределение и перераспределение угловых зондирований при поиске, автозахвате и ав-
тосопровождении целей;
обработка информации, поступающей от СПОИ, PМО, PМК и датчиков, размещенных в
различных системах РЛА;
выделение сигналов ошибок сопровождения по дальности и угловым координатам;
преобразование координат;
составление карты целей;
автозахват и автосопровождение целей в режиме разделения времени по пяти информа-
ционным каналам;
сглаживание текущих координат траектории цели;
распознавание типа стреляющих систем;
определение координат ОП (точки падения снаряда) с учетом рельефа местности;
идентификация стреляющих систем по фронту и глубине.
В режиме К при помощи ЦВУ, кроме того, решаются следующие задачи:
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
расчет трех точек начала сопровождения (ТНС) и выбор зоны обнаружения и автозахвата
снарядов;
экстраполяция начального участка к точке вылета с целью определения принадлежности
снаряда к обслуживаемой батарее;
экстраполяция конечного участка траектории к точке падения и определение отклонений
точек падения относительно поражаемой ОП.
Структурная схема обобщенного алгоритма функционирования комплекса представлена на
рис. 16.
Положение биссектрисы сектора разведки (сектора поиска) относительно направления на
север и район особого внимания (РОВ) определяется старшим артиллерийским начальником и
передается на МРЛК в закодированном виде. Эта информация вместе с другими исходными дан-
ными для ведения разведки (прямоугольные координаты
позиции МPЛК, координаты Ю-3 угла
кapты, углы укрытия и т.п.) вводятся в ЦВУ изделия.
После этого с помощью СУА антенная система по командам ЦВУ выводится в направлении
биссектрисы сектора поиска.
Прямоугольные координаты РОВ, поступающие на МРЛК в ЕГСПК, преобразуются в на-
правляющие косинусы положений луча ФАР с учетом дирекционного угла продольной оси шасси
МТ-ЛБу, углов наклона и поворота ФАР. Информация об углах наклона и поворота антенны по-
ступает в ЦВУ от специальных датчиков (см. табл. 3).
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997