Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций часть 1
Подождите немного. Документ загружается.

При дискретном управлении происходит ступенчатое изменение фазового сдвига. В этом
случае фазовращатели работают в режиме, при котором используются только две крайние об-
ласти их характеристик. Диоды дискретных полупроводниковых фазовращателей работают в
ключевом режиме: их сопротивление близко к нулю при подаче напряжения прямого смещения и
резко увеличивается при обратном напряжении смещения. Это позволяет изменять длину линии
передачи либо изменять характер нагрузки (активного на реактивный) и как следствие — фазу
радиосигнала. Поэтому такие фазовращатели могут состоять из секций, осуществляющих фикси-
рованный фазовый сдвиг путем переключения линий передачи, либо из секций подключающих к
линии реактивную нагрузку [15]. Используются также конструкции дискретных фазовращателей,
состоящих из фазосдвигающих секций различных типов.
В ферритовых фазовращателях используются тороидальные сердечники с прямоугольной
петлей гистерезиса. Перевод феррита из одного состояния намагниченности в другое осуществ-
ляется импульсом тока соответствующей полярности, пропускаемым через проводник, проходя-
щий внутри сердечника. Ферритовые фазовращатели, по сравнению с диодными, имеют более
значительные габариты и вес. Поэтому их использование в ФАР мобильных РЛС имеет место
лишь при небольших количествах каналов управления.
Для сопряжения дискретных фазовращателей с вычислителем фаз, построенным на эле-
ментах цифровой техники, их выполняют в виде последовательного соединения секций — двоич-
ных разрядов (рис.5 и 6), каждая из которых обеспечивает определенный фазовый сдвиг.
Секции
Управляющие напряжения
Рис.5
Излучатель Управляющие напряжения
Рис.6
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997

Фазовый сдвиг, реализуемый младшим разрядом фазовращателя, носит название дис-
крета его переключения Δφ, величина которого определяется требуемой точностью управления
лучом ФАР. С увеличением дискрета Δφ значительно увеличивается уровень боковых лепестков
диаграммы направленности ФАР, снижается уровень ее главного максимума, а также точность
его установки в требуемое направление. Выбор же чрезмерно малого Δφ приведет к фактической
утрате преимуществ дискретного управления перед аналоговым, так как наряду со значительным
улучшением характеристик излучения приведут к усложнению аппаратуры управления, увеличе-
нию ее габаритов и веса, а также к снижению оперативности управления лучом ФАР. Поэтому
дискрет переключения фазовых состояний фазовращателей ФАР современных РЛС в настоя-
щее время лежит в пределах от 12,25
о
(т.е. π /16 рад) до 45
о
(т.е. π/4 рад).
Величина дискрета Δφ определяет число фазовых состояний фазовращателя S. Эти ве-
личины связаны между собой соотношением
S = 2π / Δφ . (6)
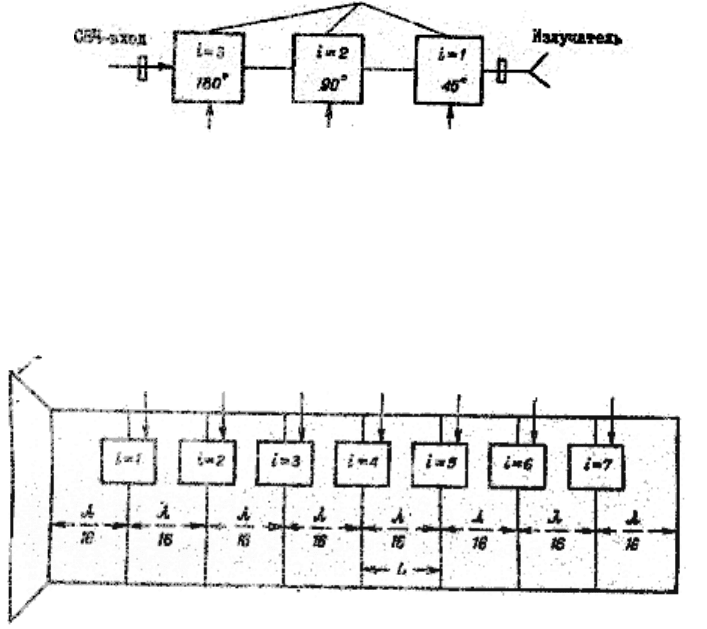
Именно величина S определяет необходимое количество секций фазовращателя, Для изо-
браженного на рис.5 проходного дискретного фазовращателя число секций — p, осуществляющих
фиксированный фазовый сдвиг путем подключения к линии передачи реактивной нагрузки, опре-
деляется выражением
p =log
2
S, (7)
а для отражательных полупроводниковых фазовращателей (см. рис.6) число секций, осуществ-
ляющих переключение (изменение) длины линии передачи, определяется как p = S - 1.
Расстояния между секциями такого фазовращателя L определяются из соотношения рабо-
чей длины волны λ и числа его состояний S / L = λ / 2S.
Тогда, для случая S = 8 (пример, изображенный на рис.6) L = λ / 16, а требуемые состояния
фазовращателя (кроме нулевого, имеющего место в случае, когда все секции разомкнуты и СВЧ-
сигнал практически без потерь проходит до противоположной входному отверстию стенки волно-
вода и обратно) будут соответствовать определенным фазовым набегам до закороченной i -й сек-
ции (табл. 1).
Таблица 1
Требуемое состояние
фазовращателя
Номер
закороченной секции
Фазовый набег до i-й секции
и обратно
45
о
(2 х 22,5
о
)
1 2 х λ /16
90
о
(2 х 45
о
)
2 4 х λ /16
135
о
(2 х 67,5
о
)
3 6 х λ /16
18
0
о
(2 х 90
о
)
4 8 х λ /16
225
о
(2 х 112,5
о
)
5 10 х λ /16
270
о
(2 х 135
о
)
6 12 х λ /16
315
о
(2 х 157,5
о
)
7 14 х λ /16
Число элементов кода управления фазовращателя определяется его разрядностью, т.е.
количеством секций. Так, для изображенного на рис.5 трехразрядного проходного фазовращателя,
код 101 соответствует фазовому сдвигу:
φ
101
= 180
о
+ 45
о
= 122,5° ( т.е. π /4 + π = 1,25 π).
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997

Для отражательного фазовращателя такому же фазовому сдвигу будет соответствовать
код 0010000, т.е. секция 3 закорочена (см. табл.1). Снижение числа секций при заданном значении
дискрета переключения Δφ обеспечивается путем применения комбинированных схем построе-
ния, которые предусматривают использование в таких фазовращателях проходных фазосдвигаю-
щих секций (т.е. секций, осуществляющих фиксированный фазовый сдвиг путем подключения ли-
нии передачи реактивной нагрузки). Так, в случае использования в составе отражательного фа-
зовращателя (см. рис.6) вместо отражательной секции 1 проходной фазосдвигающей секции,
обеспечивающей фазовый сдвиг 22,5
о
, отпадает необходимость использования секций 3, 5 и 7.
Габаритные размеры фазовращателя при этом останутся прежними (рис. 7). Таким образом, для
получения восьми фазовых состояний (Δφ = 45
о
) такому отражательному фазовращателю потре-
буется четыре фазосдвигающие секции. Необходимый фазовый сдвиг обеспечивается подачей
управляющих напряжений на управляющие входы секции в соответствии с табл.2, построенной на
основе [19].
Рис. 7
Таблица 2
Номер Фазовое состояние,
град
секции
О
45 90 135 160 225 270 315
1
-
+
-
+
-
+
-
+
2
-
-
+ +
- -
-
-
3
- -
-
-
+ +
-
-
4
-
-
-
--
-
+
+
П ри м е ч а н и е. Для серийно выпускаемого фазовращате
ля
"Полонез" [19]: "-" соответствует на-
пряжению 27 В ± 10% (команда О); ••" +" соответствует напряжению -1 В ± 10% (команда 1).
Следует отметить, что минимально необходимое количество элементов кода для обеспе-
чения требуемого числа состояний фазовращателя S определяется в соответствии с соотноше-
ниями (6) и (7) :
p =log
2
(2π / Δφ) . (8)
При этом код управления, поступающий от вычислителя фаз, может быть параллельным
либо последовательным [14].
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997

В соответствии с вышеизложенным, устройство управления m, n - фазовращателем ФАР
выполняет следующие функции:
прием и хранение кодов команд управления, поступающих от вычислителя фаз и соответ-
ствующих требуемому угловому положению луча;
приём и хранение (либо только хранение) кодов корректирующих воздействия (коллимаци-
онных поправок, команд управления нулями ДН и т.п.);
суммирование кодов команд управления с кодами корректирующих воздействий и получе-
ние кода управления фазовращателем;
преобразование кода управления в код, соответствующий конструкции фазовращателя, и
последующее преобразование этого цифрового кода в напряжения, необходимые для управления
переключающими элементами секций фазовращателя.
Конструкция устройства управления фазовращателем, таким образом, определяется как
выбранным типом фазовращателя, типами переключающих элементов его секций, их конструкци-
ей и количеством, так и архитектурой СУЛ в целом: способом формирования команд управления,
видом кода команды, способами формирования компенсирующих воздействий, количеством неза-
висимо управляемых фрагментов ФАР и т.п.
Далее рассмотрим принципы функционирования МРЛС с временным разделением кана-
лов, предназначенной для слежения за ОН, попадающим в зону ее ответственности (сектор раз-
ведки).
Принципы функционирования МРЛС с временным разделением кананалов
Принципиальное отличие структурной схемы МРЛС с временным разделением каналов
(рис. 8) от схемы, изображенной на рис. 2, заключается в наличии СУЛ, рассмотренной ранее.
Рис.8
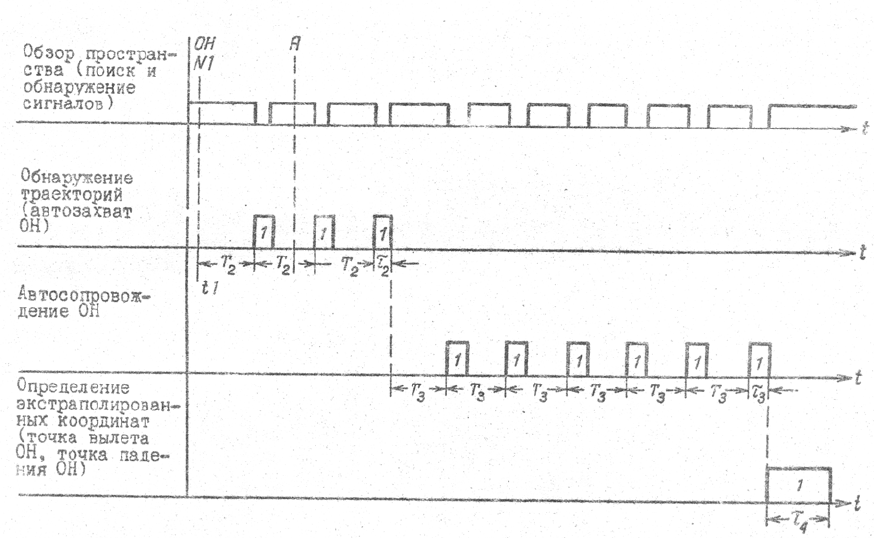
Станция начинает работу с обзора пространства и поиска объектов наблюдения (рис. 9).
Последовательность обзора по азимуту, углу места и дальности определяется бортовым компью-
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
тером. Информация о требуемом положении луча антенны по азимуту и углу места передается
системе управления лучом. По этим данным входящий в ее состав вычислитель фаз осуществля-
ет расчет команд управления фазовращателями и передает их каналам управления ФАР с целью
формирования на раскрыве требуемого АФР с точностью, определяемой техническими характери-
стиками МРЛС, а также ее техническим состоянием.
РРР
Рис.9
После установки всех фазовращателей ФАР в заданные состояния (т.е. перефазировки
ФАР) передающей и приемной системам, а также обнаружителю подается команда на проведение
зондирования.
Принятый РЛС сигнал подвергается преобразованию и обработке с целью извлечения по-
лезной информации. Различают первичную и вторичную обработку информации, поступающей с
выхода приемной системы РЛС.
П е р в и ч н а я о б р а б о т к а радиолокационной информации включает в себя обна-
ружение полезного сигнала в шумах; оценку его параметров (измерение координат обнаруженных
целей).
Дополнительными операциями могут быть: кодирование координат обнаруженного ОН;
первичная нумерация ОН; запоминание координат ОН.
Как правило. первичная обработка осуществляется в МРЛС цифровыми методами.
Качество выполненных операций характеризуется вероятностями правильного обнаруже-
ния D и ложной тревоги F для операции обнаружения и среднеквадратическим отклонением оцен-
ки параметров сигналов б
и
— для. операции оценки параметров.
При первичной обработке используются статистические отличия полезных сигналов от по-
мех.
Состав оцениваемых параметров сигнала устанавливается при создании системы первич-
ной обработки. Такими параметрами являются: запаздывание принятого сигнала относительно
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
зондирующего (соответствует дальности до ОН), наклон фазового фронта принятого сигнала (пе-
ленг ОН); доплеровское смещение частоты принятого сигнала (радиальная скорость движения ОН)
и т.д.
Таким образом, радиолокационный поиск необходимо рассматривать как процесс обследо-
вания посредством РЛС заданной области пространства для обеспечения РЛ контакта с ОН на
время, достаточное для обнаружения отраженного от нее сигнала с заданной вероятностью при
допустимом значении вероятности ложны тревог. Для проведения поиска осуществляют обзор
заданной области пространства по угловым координатам и дальности, в процессе которого для
каждого элемента разрешения решают статистическую задачу обнаружения сигнала на фоне по-
мех.
Сигналы обнаруживаются по результатам обработки пачки импульсов, отраженных от OН.
При неподвижном луче ФАР накапливается заданное (определяемое командами бортового компь-
ютера) количество импульсов, в результате чего в соответствии с принятым в данной МРЛС кри-
терием обнаружения выносится решение о наличии или отсутствии полезных сигналов в данном
направлении.
Обнаружители, обрабатывающие фиксированное число импульсов, называются обнаружи-
телями с фиксированным объемом выборки (ФОB). Оптимизация обнаружителей с ФOB (миними-
зация вероятности ошибочных решений F) осуществляется на основе критерия Неймана-Пирсoна
[20]. Среднее число обрабатываемых импульсов при заданных характеристиках обнаружения мо-
жет быть минимизировано на основе критерия последовательного наблюдения, предложенного
А. Вальдом [21]. Обнаружители, позволяющие значительно снизить временные затраты, называют
последовательными.
Радиолокационное обнаружение целей обычно осуществляется на фоне помех различного
происхождения: активных и пассивных, преднамеренных и непреднамеренных [22].
В РЛС с ФАР наряду с известными методами селекции движущихся целей (СДЦ), как в
аналоговом, так и в цифровом вариантах [23], возможна реализация специфического метода за-
щиты от этих помех — адаптивной пространственно-временной селекции, сущность которой за-
ключается в создании АФР на раскрыве ФАР, обеспечивающего формирование глубоких провалов
в ее ДН, направленных на источники помех. При этом обеспечивается защита как от активных, так
и от пассивных помех, положение которых в пространстве может изменяться в процессе функцио-
нирования МРЛС [24].
В результате обнаружения сигналов формируются радиолокационные метки, которые
представляют собой оценки мгновенных значений параметров источника обнаруженного сигнала.
В т о р и ч н а я о б р а б о т к а радиолокационной информации проводится с целью из-
влечения из совокупности отметок необходимой информации и выработки на ее основе опреде-
ленных решений, содержание которых зависит от назначения РЛС.
Вторичная обработка включает в себя следующие операции:
обнаружение (автозахват) траекторий целей — принятие по нескольким отметкам решения
о наличии или отсутствии ОН;
сопровождение ОН, сглаживание параметров траекторий ОН — оценку координат и пара-
метров движения ОН;
экстраполяцию траекторий — вычисление параметров траектории на наблюдаемом участ-
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
ке;
распознавание типа ОН (например, мина, снаряд, ракета и т.п.).
Если при первичной обработке используются статистические отличия полезных сигналов
от помех, то при вторичной обработке в основном используются статистические характеристики
траекторий ОН, поступающих от обнаружителя в течение некоторого интервала времени (см. рис.
9).
Критериями качества операции обнаружения траекторий являются вероятности их пра-
вильного и ложного обнаружения.
Критериями качества операции сопровождения траекторий ОН являются среднеквадрати-
ческие погрешности оценок параметров траекторий — изменяющихся во времени координат цели,
скорости и т.д. Алгоритмы вторичной обработки радиолокационной информации реализуются в
современных РЛС в виде соответствующего программного обеспечения их бортовых компьютеров.
На основе данных вторичной обработки радиолокационной информации могут вырабаты-
ваться команды управления формой и направлением главного максимума ДН, команды управле-
ния средствами поражения (т.е, наведения), и т.д.
В силу статистического характера РЛ информации нельзя еще достоверно утверждать, что
полученная РЛ отметка сформирована в результате приема сигнала действительно отраженного
от цели, т.е. наряду с истинными могут формироваться и ложные отметки. Поэтому для оконча-
тельного обнаружения ОН (а не сигнала) необходимо осуществить обнаружение его траектории,
т.е. привязать РЛ отметки, полученные через определенные интервалы времени наблюдения, к
ожидаемой траектории, характер которой определяется видом обнаруживаемых РЛС объектов
наблюдения (баллистические, аэродинамические и т.п.).
Таким образом, если в результате поиска в момент времени t
1
(см. рис. 9) обнаружен по-
лезный сигнал, то в таблице регистрации запросов (ТРЗ), которая хранится либо в оперативном
запоминающем устройстве (ОЗУ) бортового компьютера, либо (в случае оцифровки сигналов по-
сле обработки в приемной системе) в ОЗУ системы первичной обработки информации записыва-
ется требование на проведение обнаружения траектории, т.е. ОН передается на этап автозахвата.
При этом в ТРЗ для объекта наблюдения №1 регистрируется время начала зондирования
t
1
, к которому добавляется время Т
2
, называемое интервалом обращения к ОН на этапе захвата, а
также полярные координаты предполагаемого объекта наблюдения.
После этого до момента времени t
1
+ Т
2
продолжается поиск других ОН, затем луч ФАР пе-
ребрасывается в направление, соответствующее угловым координатам ОН №1 (см. рис. 9).
Процесс обнаружения траектории обычно разбивается на два этапа: завязки траектории
(ЗТ) и ее подтверждение (ПТ) [9].
Для завязки траектории достаточно двух отметок, поэтому при выполнении этой операции
используется критерий "2 из m". Завязка траектории начинается с образования вокруг обнару-
женной отметки так называемого начального строба первичного захвата. Строб имеет форму сфе-
рического слоя с размерами:
ΔR
cтp
= 2 R
мах
T
зт
;
Δα
cтp
= 2 α
мах
T
зт
;
Δεα
cтp
= 2 ε
мах
T
зт
;
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
где R
мах
; α
мах
; ε
мах
— максимально возможные радиальная и угловые скорости цели соот-
ветственно;
T
зт
— интервал времени, через который получается вторая отметка.
В рассматриваемых многоканальных РЛС интервал T
зт
выбирается таким, чтобы переме-
щение ОН за это время хотя бы по одной из трех измеряемых координат значительно превышало
погрешности измерения этой координаты. В этом случае по двум отметкам может быть вычислена
оценка вектора скорости ОН и предсказано ее положение на интервал экстраполяции T
пт
, что не-
обходимо для осуществления второго этапа - подтверждения траектории.
Таким образом, если после m зондирований вторая отметка не обнаружена, первая сбра-
сывается как ложная.
В связи с тем, что в рассматриваемом на рис. 9 примере на момент времени t
1
+ Т
2
ин-
формация о скорости и направлении движения ОН №1 отсутствует, осуществляется его поиск в
течение времени
τ
2
в объеме начального строба захвата.
После получения второй отметки от ОН №1 по двум известным точкам экстраполируется
ее положение на момент времени t
1
+ 2Т
2
и вновь регистрируется заявка на ТРЗ. Если к моменту
времени t
1
+ 2Т
2
+ τ
2
в ТРЗ нет заявок (а в рассматриваемом на рис. 9 примере именно такая си-
туация и имеет место для ОН №1), то обзор пространства продолжается с той точки. где он был
прерван.
Далее завязанная таким образом траектория ОН №1 передается на этап подтверждения,
сущность которого состоит в следующем. По полученным на этапе завязки и двум РЛ отметкам
осуществляют оценку вектора скорости, по которой методом линейной экстраполяции прогнози-
руют положение ОН на интервале Т
ПТ
, величину которого выбирают такой, чтобы приращение ко-
ординаты х за это время значительно превышало погрешность измерений, но при этом траекторию
можно было бы считать линейной. Для упрощения технической реализации целесообразно выби-
рать Т
ПТ
= T
зт
(на рис. 9 этот временной интервал обозначен как Т
2
). Если в очередном стробе
подтверждения произойдет пропуск радиолокационной отметки, осуществляют экстраполяцию
еще на интервал Т
ПТ
, и т.д. В дальнейшем для экстраполяции координат в каждой следующей точ-
ке используются результаты измерений в двух предыдущих точках.
Для подтверждения траектории может использоваться логический критерий l из n, либо
критерий последовательного анализа [21].
В первом случае число испытаний n фиксируется заранее и решение о подтверждении
траектории выносится при положительных исходах. Во втором случае по результатам исходов ис-
пытаний в каждом стробе подтверждения формируется логарифм отношения правдоподобия,
который последовательно, после каждого испытания сравнивается с двумя порогами — верхним и
нижним, и решение о подтверждении или сбросе траектории как ложной осуществляется при пре-
вышении соответствующего порога.
Основными показателями эффективности этапа подтверждения траекторий являются ве-
роятность подтверждения истинной траектории, вероятность подтверждения ложной траектории и
время на принятие решения.
Этап автозахвата (обнаружения траекторий) завершается после измерения координат ОН
в тpeбyeмом количестве точек.
Далее при выполнении критерия подтверждения ОН №1 передается на этап сопровожде-
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
ния путем замены в ТРЗ признака заявки на зондирование. При этом запрос в ТРЗ остается на том
же месте, но уже регистрируется момент времени t
1
+ 3Т
2
+ Т
3
(Т
3
— интервал обращения к ОН
на этапе автосопровождения).
При невыполнении критерия подтверждения осуществляется сброс траектории как ложной.
Радиолокационное сопровождение представляет собой процесс измерения с заданной точ-
ностью текущих координат и параметров движения ОН как функций времени, т.е. в процессе
сопровождения ОН выполняются операции экстраполирования параметров движения ОН на пери-
од Т
3
(см. рис. 9) и сглаживания.
При активном сопровождении луч антенны в заданные моменты времени направляется на
ОН, положение которого экстраполировано по результатам предыдущих измерений. Измерение
координат в окрестности экстраполированной точки осуществляется по величине сигнала ошибки,
пропорциональной отклонению истинных координат ОН от экстраполированных. Сигнал ошибки по
угловым координатам формируется моноимпульсным методом, как отношение амплитуд сигналов
в разностном и суммарном каналах [17], а по дальности по величине временного рассогласования
между стробом дальности и отраженным от ОН сигналом.
Для активного дискретного сопровождения цели может быть использован один из двух ал-
горитмов экстраполяции — динамический или кинематический.
Динамический алгоритм предполагает учет действующих на ОН сил, причем экстраполи-
руемая траектория должна подчиняться уравнениям движения, учитывающим эти силы. Алгоритм
позволяет осуществлять экстраполяцию траектории с высокой точностью на большой интервал
времени, однако использование его для сопровождения нескольких целей встречает значитель-
ные трудности из-за ограниченного быстродействия вычислительных устройств.
Динамические алгоритмы экстраполяции находят применение, например, при определении
точек вылета и падения баллистических ОН.
В случае использования алгоритмов кинематического сопровождения экстраполируемая
траектория представляется в виде полинома с временем в качестве аргумента, параметры которо-
го должны удовлетворять координатам ОН, измеренным РЛС. Поскольку этот алгоритм не базиру-
ется на уравнениях движения ОН, он не может обеспечить экстраполяцию на такой же большой
интервал времени, как и динамический. Однако он в меньшей степени загружает вычислительное
устройство. Поэтому кинематический алгоритм оказывается более предпочтительным для органи-
зации активного сопровождения ОН.
Оценка или сглаживание параметров траектории - это вычисление значений параметров
траектории (координат, составляющих скорости и производных координат более высокого поряд-
ка) по данным измерений координат, полученных при сопровождении ОН с помощью РЛС.
Радиолокационная станция в моменты времени t
1
, t
2
,…,t
m
производит m измерений коор-
динаты u с погрешностями ответственно q
1
, q
2
, …, q
m
.
Для определения параметров движения ОН выбирают сглаживающую функцию, описы-
вающую изменения его координат во времени, а затем находят оценки параметров этой функции.
Выбор сглаживающей функции зависит от типа ОН. Например, для оценки параметров траекторий
аэродинамических и баллистических ОН может использоваться полиномиальная модель движения
[10].
Пусть, например, проекция траектории ОН на одну из осей координат аппроксимируется
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997

полиномом степени J:
J
u(t)=∑ а
j
t
j
=a
0
t
0
+ a
1
t
1
+a
2
t
2
+ … +a
j
t
j
,
j=o
где коэффициенты полинома а
j
— параметры траектории, пропорциональные производным
порядка j координаты u.
В процессе сглаживания необходимо определить параметры траектории a
0
, a
1
, a
2
,…, a
j
,
т.е. вычислить их оценки по измеренным значениям координат u
1
, u
2
,…, u
m
, полученные в моменты
времени t
1
, t
2
,…, t
m
с соответствующими погрешностями q
1
, q
2
,…, q
m
.
Для определения параметров траектории ОН используется ряд методов, которые часто на-
зывают методами фильтрации: метод наименьших квадратов; рекуррентные методы. В последние
десятилетия для сглаживания параметров траекторий ОН, сопровождаемых в реальном масштабе
времени, применяется фильтр Калмана и его модификации. Сравнительный анализ методов
фильтрации приведен в [10], где показано, что выбор метода оценки параметров траектории зави-
сит от характера движения ОН, требуемой точности определения параметров, а также от быстро-
действии бортового компьютера РЛС и имеющихся у него объемов памяти. В память могут быть
заложены несколько алгоритмов сглаживания, выбираемых в процессе работы в зависимости от
характера ожидаемых ОН.
Рис. 10
На рис. 10 приведены основные величины, используемые на этапе сопровождения ОН:
* — измеренные значения координат u(u
1
, u
2
,…, u
m
);
• — оценки координаты u внутри временного отрезка t
1
, t
2
,…, t
m
(сглаженные координаты
ОН);
Δ — оценки координаты u за пределами временного отрезка t
1
, t
2
,…, t
m
(экстраполирован-
ные координаты ОН).
Таким образом в процессе сопровождения траектории неоднократно решаются следующие
задачи:
оценка параметров траектории ОН (координат, составляющих скорости и т.д.) по дискрет-
ным данным, поступающим в моменты времени , t
1
, t
2
, t
3
,…;
экстраполяция параметров траектории на период обращения к ОН по результатам двух и
более измерений его координат;
выделение упрежденной области, в которую с заданной вероятностью должна попасть но-
вая отметка ОH (стробирование пространства);
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997