Фарзане Н.Г., Илясов Л.В. Технологические измерения и приборы
Подождите немного. Документ загружается.


121
ГЛАВА 5
СИСТЕМЫ ПЕРЕДАЧИ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ
§ 5.1. Общие сведения
Системы передачи измерительной информации предназначены для сбора
информации с удаленных от наблюдателя объектов. В телемеханике подобные
измерительные системы называют телеизмерительными (от греч. tele —
далеко).
Для контроля и управления технологическими процессами широко
используются телеизмерительные системы ближнего действия, называемые
системами дистанционной передачи. С помощью этих систем измерительная
информация может передаваться на расстояние от нескольких десятков метров
до 10—20 км.
Информация по каналам связи в измерительных системах передается в
форме сигналов (см. табл. 1.1).
Формирование сигналов осуществляется путем нанесения информации на
материальные носители, которыми служат периодические процессы или
физические величины, например электрический ток, давление газа,
электромагнитные колебания, звуковые волны. Нанесение информации на
носители осуществляется путем изменения одного или нескольких параметров
носителя в соответствии с передаваемой информацией. Процесс нанесения
информации на носитель называют модуляцией.
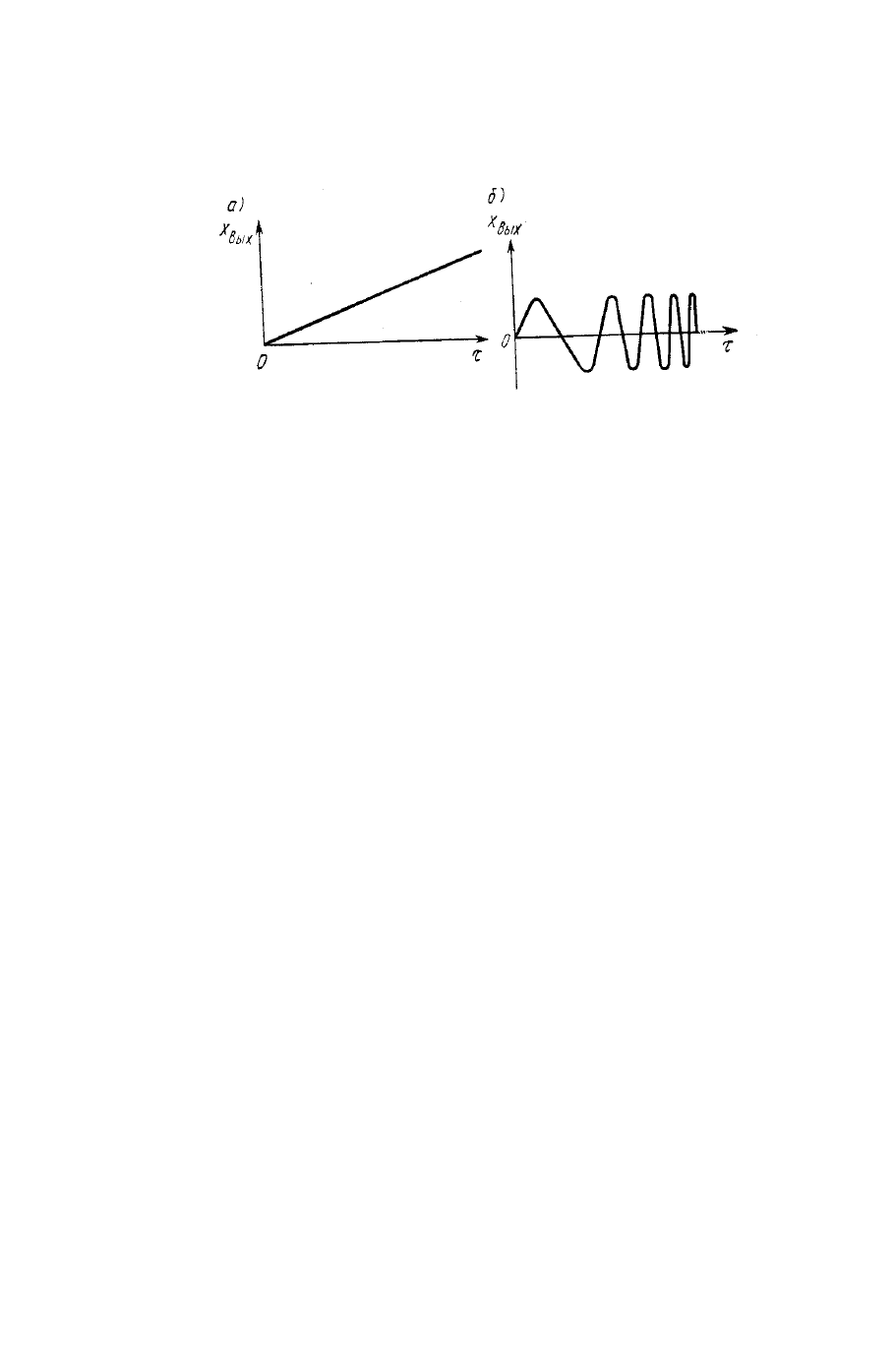
В настоящее время известно более десяти видов модуляций, из которых в
системах передачи информации, применяемых на предприятиях,
использующих химико-технологические процессы, получили распространение
прямая модуляция физических величин (рис. 5.1, а) и частотная модуляция
гармонических колебаний (рис. 5.1, б).
По виду энергии носителя информации системы передачи информации
подразделяют на электрические, пневматические и гидравлические.
Информация в указанных системах передается в виде «естественных» или
унифицированных сигналов. Основные виды и параметры унифицированных
сигналов приведены в табл. 2.3. В ГСП приняты следующие системы передачи:
пневматическая, электрическая токовая и электрическая частотная. Кроме
перечисленных систем передачи информации в практике измерений при-
меняются: реостатная, индуктивная, дифференциально-трансформаторная,
ферродинамическая, сельсинная и др.
Указанные системы передачи информации получили название в
соответствии с типом элемента, осуществляющего преобразование
122
«естественного» сигнала (перемещения) в электрический сигнал.
В § 2.9 было акцентировано внимание на эффективности блочно-
модульного принципа построения средств измерений. Указанный принцип
широко применяется при создании первичных измерительных
преобразователей (ПИП) систем передачи информации ГСП.
Рис. 5.1. Виды модуляций
Возможность построения ПИП блочно-модульного типа объясняется тем,
что большое число технологических параметров, таких, как давление, перепад
давления (расход), плотность, вязкость, температура, уровень, скорость
вращения и другие, легко и с достаточной для практики точностью
преобразуются в усилие или линейное (угловое) перемещение. В ПИП блочно-
модульного- типа преобразование технологического параметра в
унифицированный сигнал осуществляется по схемам: а) технологический
параметр→усилие→унифицированный сигнал; б) технологический пара-
метр→перемещение→ унифицированный сигнал. Для преобразования
технологического параметра в усилие или линейное (угловое) перемещение
разработаны методы и средства измерений, подробно рассмотренные в
соответствующих главах. Преобразование усилия в унифицированный
пневматический или электрический сигналы осуществляется
преобразователями, работа которых основана на принципе компенсации сил.
Широкое распространение получили преобразователи, с помощью которых
сила преобразуется в пневматический сигнал — преобразователи «сила —
давление», а также преобразователи «сила — ток», посредством которых сила
преобразуется в унифицированный сигнал постоянного тока (токовый сигнал).
Указанные преобразователи иногда соответственно называют
«пневмосиловые» и «электросиловые».
Преобразование перемещения в унифицированный электрический сигнал
постоянного тока осуществляется преобразователями «перемещение — ток»,
называемыми магнитомодуляционными (преобразователи с компенсацией
магнитных потоков).
Преобразователи «сила — давление», «сила — ток» и «перемещение —
ток» представляют собой модули, использование которых обеспечивает
взаимозаменяемость ПИП в целом и отдельных его узлов. Конструктивно ПИП
в ГСП оформляется в виде блока,

123
включающего чувствительный элемент, к которому непосредственно
подводится измеряемый технологический параметр П, и один из названных
преобразователей.
§ 5.2. Пневматическая система передачи измерительной информации
Системы передачи измерительной информации с унифицированным
пневматическим сигналом находят применение в тех отраслях про-
мышленности, где по условиям техники безопасности нецелесообразно
использование электрических систем передачи. Пневматическая система
передачи обеспечивает надежную передачу информации на расстояние до 300
м, а при использовании специального усилителя мощности — до 600 м. При
больших расстояниях между объектом и пунктом приема информации точность
системы передачи информации уменьшается.
Передача информации в пневматических системах осуществляется по
каналу связи, представляющему собой пластмассовую или металлическую
трубку внутренним диаметром 4—10 мм.
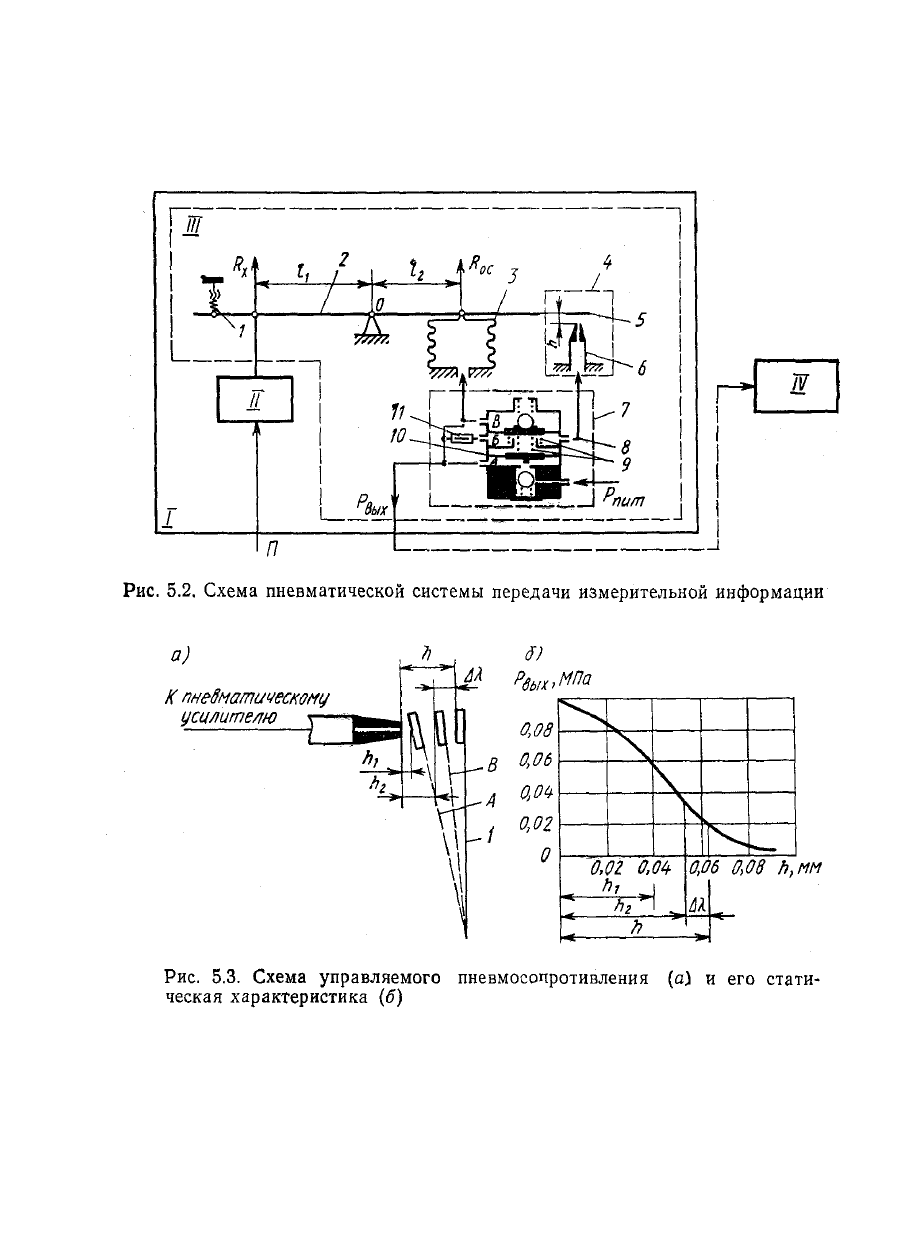
На рис. 5.2 представлена схема пневматической системы передачи.
Система включает ПИП / (источник информации) и приемник информации IV,
соединенные между собой каналом связи. ПИП / устанавливается
непосредственно на объекте и осуществляет преобразование измеряемого
параметра П в унифицированный пневматический сигнал Рвых.
Основными узлами ПИП являются чувствительный элемент // и
преобразователь «сила — давление» III. В качестве чувствительного элемента
может быть использован любой чувствительный элемент, осуществляющий
преобразование технологического параметра Я в усилие. Например, при
измерении давления чувствительным элементом может служить трубчатая
пружина, сильфон или мембрана (см. § 4.6), а при измерении уровня жидкости
— буёк и т. п.
Преобразователь «сила — давление» (см. рис. 5.2) состоит из корректора
нуля — пружины 1, рычага 2, сильфона обратной связи 3, управляемого
пневмосопротивления типа «сопло — заслонка» 4 и пневматического усилителя
мощности 7. Управляемое пневмосопротивление 4 является индикатором
перемещения рычага 2. Питание сопла производится через усилитель мощности
7 из линии выходного сигнала через постоянное пневмосопротивление 11.
Поэтому давление в камере Б всегда меньше, чем в камерах А и В, на одно и то
же значение, определяемое натяжением пружин 9. Преобразование
технологического параметра П в пневматический сигнал осуществляется
следующим образом. При отклонении преобразуемого параметра П от
исходного значения изменяется сила Rx, что приводит к перемещению рычага 2
относительно точки опоры О. Одновременно с рычагом перемещается и
Укрепленная на нем заслонка 5 относительно сопла 6. Это приводит
124
к изменению зазора h между соплом и заслонкой. В результате зазор
становится равным h
1
и рычаг 2 занимает положение А (рис. 5.3, а). Этому
положению заслонки соответствует давление на выходе сопла, которое после
усиления в усилителе мощности подается в сильфон отрицательной обратной
связи 3 и в канал
связи. Под действием возросшего давления Р
ВЫХ
сильфон 3 начинает
деформироваться и отодвигать заслонку от сопла. Изменение Р
ВЫХ
происходит
до тех пор, пока не наступит равновесие системы. Рычаг 1 при этом займет
положение В, при котором расстояние между соплом и заслонкой станет
равным h
2
. Расстояние h
2
меньше расстояния h на ∆λ Таким образом, в новом
состоянии равновесия
125
положение рычага уже не соответствует начальному, т. е. при работе
преобразователя по схеме компенсации усилий возникают перемещения, без
которых преобразователь не может работать Однако эти перемещения очень
малы и определяются ходом заслонки относительно сопла (0,01—0,02 мм).
Поэтому рычаг с заслонкой при любых усилиях остается практически в
неизменном положении.
В процессе работы усилителя мощности 7 за счет перемещения мембран 8
и 10 перепад давлений на пневмосопротивлении И остается всегда постоянным
(4000—6500 Па), что увеличивает крутизну статической характеристики
преобразователя типа «сопло — заслонка» (рис. 5.3, б).
Уравнение статической характеристики преобразователя «сила—
давление» может быть получено из выражения, описывающего состояние
равновесия рычага 2:
21
lRlR
осx
=
(5.1)
где R
x
— усилие, развиваемое чувствительным элементом; R
oc
— усилие,
развиваемое сильфоном обратной связи. Представляя величину R
oc
в виде
выхэфос
PFR =
(5.2)
и решая совместно (5.1) и (5.2), получим
)/(
21 эфxвых
FllRP =
(5.3)
где F
эф
— эффективная площадь сильфона обратной связи.
Так как диапазон изменения унифицированного пневматического сигнала
0,02—0,1 МПа, то при R
X
=0 путем натяжения пружины 1 корректора нуля
осуществляют настройку нулевого сигнала преобразователя. В результате
настройки зависимость (5.3) может быть переписана в виде
02.0
2
11
+=
эф
вых
Fl
lR
P
(5.4)
Это уравнение представляет собой статическую характеристику
преобразователя «сила — давление». Оно может быть преобразовано в
уравнение статической характеристики ПИП, если принять во внимание
статическую характеристику чувствительного элемента
ПkR
x 0
=
(5.5)
где k
0
— коэффициент преобразования чувствительного элемента. С учетом
уравнения (5.5) статическая характеристика ПИП Примет вид
02.0
2
1
0
+= П
Fl
l
kP
эф
вых
(5.6)
126
или
02.0+= ПkP
Пвых
(5.7)
где k
П
=
эф
Fl
l
k
2
1
0
—коэффициент преобразования ПИП.
Путем изменения коэффициента k
n
можно изменять диапазон измерений
преобразователя в пределах ±(10—20)%. Практически это достигается
изменением отношения l
1
/l
2
в результате перемещения точки опоры О. Для
преобразователя, настроенного на заданный диапазон преобразования,
статическая характеристика (5.7) может быть представлена и в виде
02.0
08.0
max
+=
П
П
P
вых
(5.8)
Здесь
max
08.0
П
— коэффициент преобразования ПИП, полученный из
уравнения (5.7) при П=П
mах
и Р
ВЫХ
=0,1 МПа.
В тех случаях, когда в процессе эксплуатации ПИП возникает
необходимость изменения диапазона измерений в больших пределах,
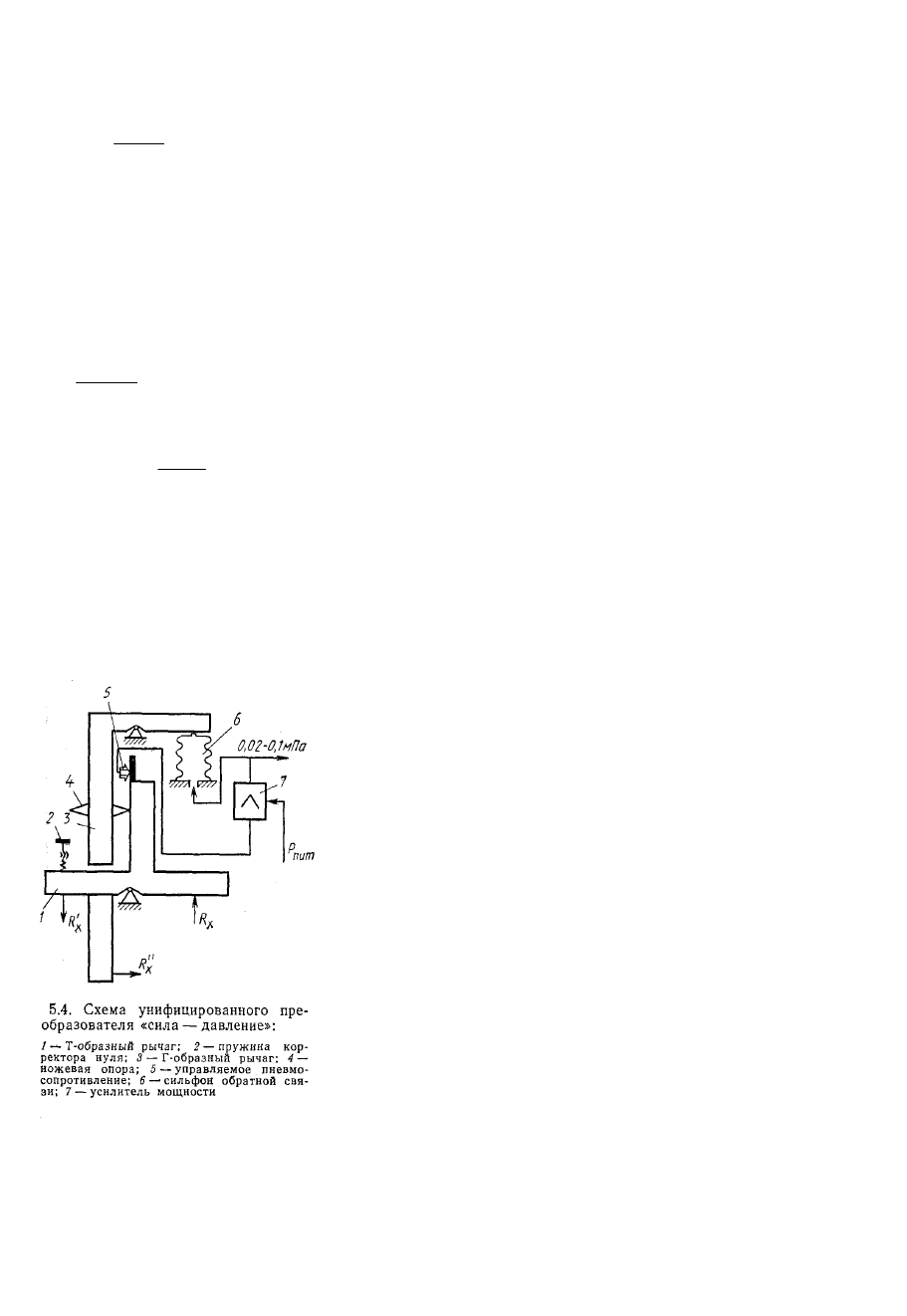
целесообразно применение ПИП, оснащенного преобразователем «сила —
давление», схема которого приведена на рис. 5.4.
Принципиальное отличие преобразователя
«сила — давление», представленного на рис. 5.4,
от рассмотренного ранее — в наличии Г-
образного рычага 3 с ножевой опорой 4,
последняя может перемещаться вдоль Г-
образного рычага, чем достигается изменение
пределов измерений преобразователя в широком
диапазоне. Отличительной особенностью пре-
образователя является и то, что конструкция
рычага 1 позволяет подключать чувствительные
элементы различных видов. Стрелками показаны
направления усилий, развиваемых
подключаемыми чувствительными элементами.
Назначения остальных элементов
преобразователя (пружины 2 корректора нуля,
управляемого пневмосопротивления 5, сильфона
обратной связи 6 и усилителя мощности 7 аналогичны назначению
соответствующих элементов рассмотренного преобразователя. Классы
точности ПИП с унифицированным пневматическим сигналом 0,5—2,5. В
качестве приемников информации в пневматических системах передачи
широко применяются вторичные приборы, принцип действия
127
которых основан на методе уравновешивающего преобразования. Эти приборы
входят в ГСП и обеспечивают принципиально более высокую точность
измерений, чем приборы прямого действия. Промышленность выпускает
показывающие и самопишущие вторичные приборы с диапазоном измерений
0,02—0,1 МПа.
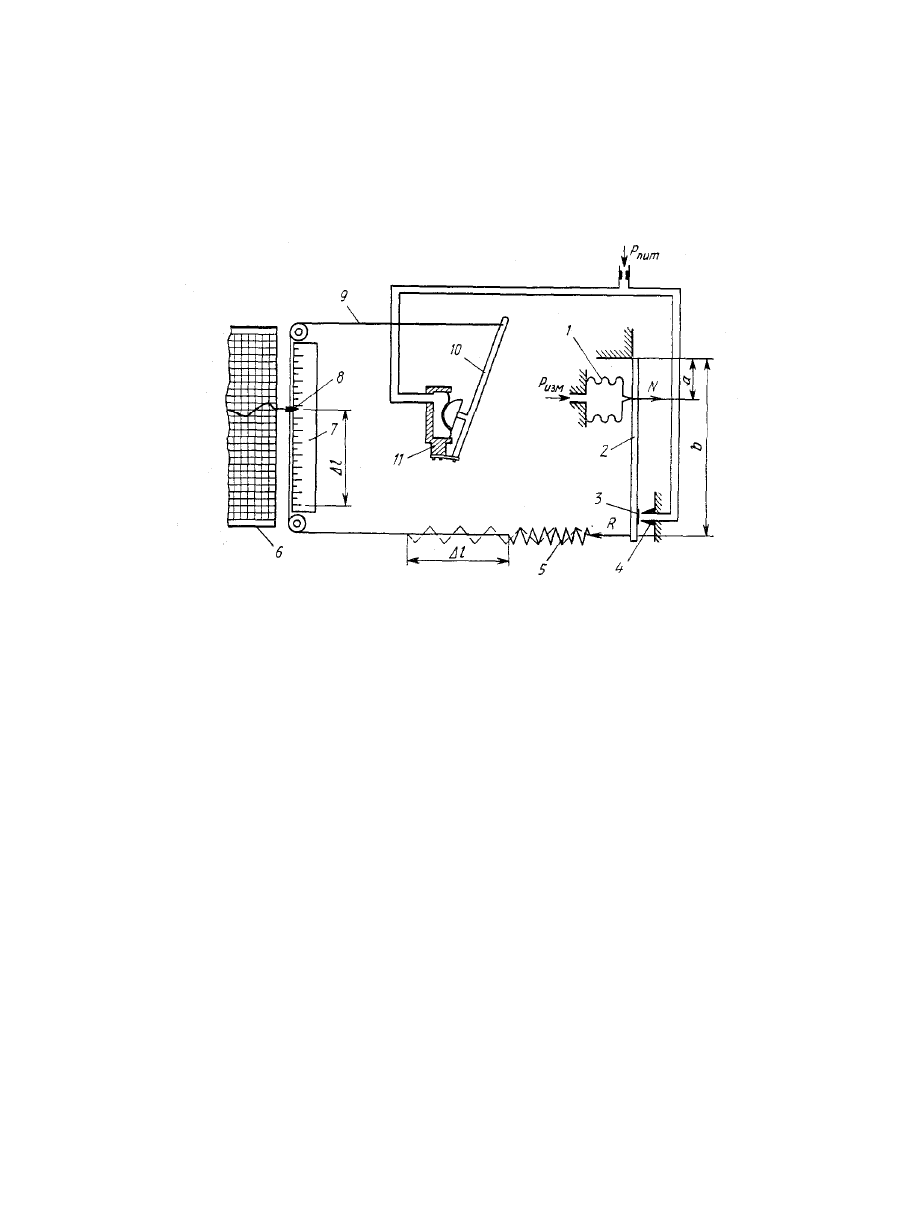
Измеряемое давление Р (рис. 5.5) преобразуется чувствительным
элементом прибора — сильфоном 1 в силу N, под действием
Рис. 5.5. Схема самопишущего измерительного прибора пневматической
системы передачи измерительной информации
которой рычаг 2 и укрепленная на нем заслонка 3 перемещаются относительно
сопла 4. В результате в линии, соединяющей сопло с силовым элементом 11,
изменяется давление сжатого воздуха, что приводит к перемещению
чашеобразной мембраны силового элемента и упирающегося в него рычага 10,
связанного с рычагом 2 через нить 9 и пружину обратной связи 5. Последняя
служит для преобразования перемещения конца рычага 2 в усиление R. Пере-
мещение рычага 2 под действием указанных сил происходит до тех пор, пока
момент М\, создаваемый силой N, не уравновесится моментом М
2
, создаваемым
силой R. В состоянии равновесия, т. е. при
21
MM =
(5.9)
перемещение рычага прекращается. О значении измеряемого давления судят по
положению указателя 8 на шкале 7 либо по записи на диаграммной ленте 6
пера, укрепленного на указателе. Покажем, что в состоянии равновесия
перемещение указателя по шкале

128
пропорционально измеряемому давлению. С этой целью равенство (5.9)
представим в виде
NaRb
=
(5.10)
где b и а — расстояния от точек приложения сил R и N до оси вращения рычага.
Принимая во внимание зависимости
PFN
эф
=
(5.11)
и
l
c
R
∆
=
(5.12)
преобразуем равенство (5.10):
P
bc
aF
l
эф
=∆
(5.13)
где Δl — деформация пружины, равная отклонению указателя; F
эф
—
эффективная площадь сильфона; с — жесткость пружины. В выражении (5.13)
все величины, за исключением Р,— постоянные. Поэтому уравнение (5.13)
может быть представлено следующим образом:
kP
l
=
∆
(5.14)
где k =
bc
aF
эф
.
В настоящее время промышленностью освоено несколько модификаций
вторичных приборов, построенных по рассмотренной схеме. Шкала приборов
процентная. Класс точности 1,0.
§ 5.3. Электрические системы передачи измерительной информации с
унифицированным токовым сигналом
Одной из распространенных систем передачи измерительной ин-
формации является электрическая система с унифицированным токовым
сигналом. Использование постоянного тока в этой системе повышает ее
помехоустойчивость, так как позволяет исключить влияние индуктивности и
емкости линий связи на сигнал измерительной информации и увеличивает
протяженность канала связи до 5—20 км.
Приемниками информации в электрических системах передачи могут
быть промежуточные преобразователи, регуляторы, измерительные приборы
или средства вычислительной техники.
В качестве источников информации в электрических системах передачи с
унифицированным токовым сигналом применяются первичные измерительные
преобразователи, оснащенные преобразователями либо «сила — ток», либо
«перемещение — ток».
129
Первичные измерительные преобразователи, оснащенные пре-
образователями «сила — ток». В основу работы ПИП, оснащенных
преобразователями «сила — ток», положен принцип силовой компенсации.
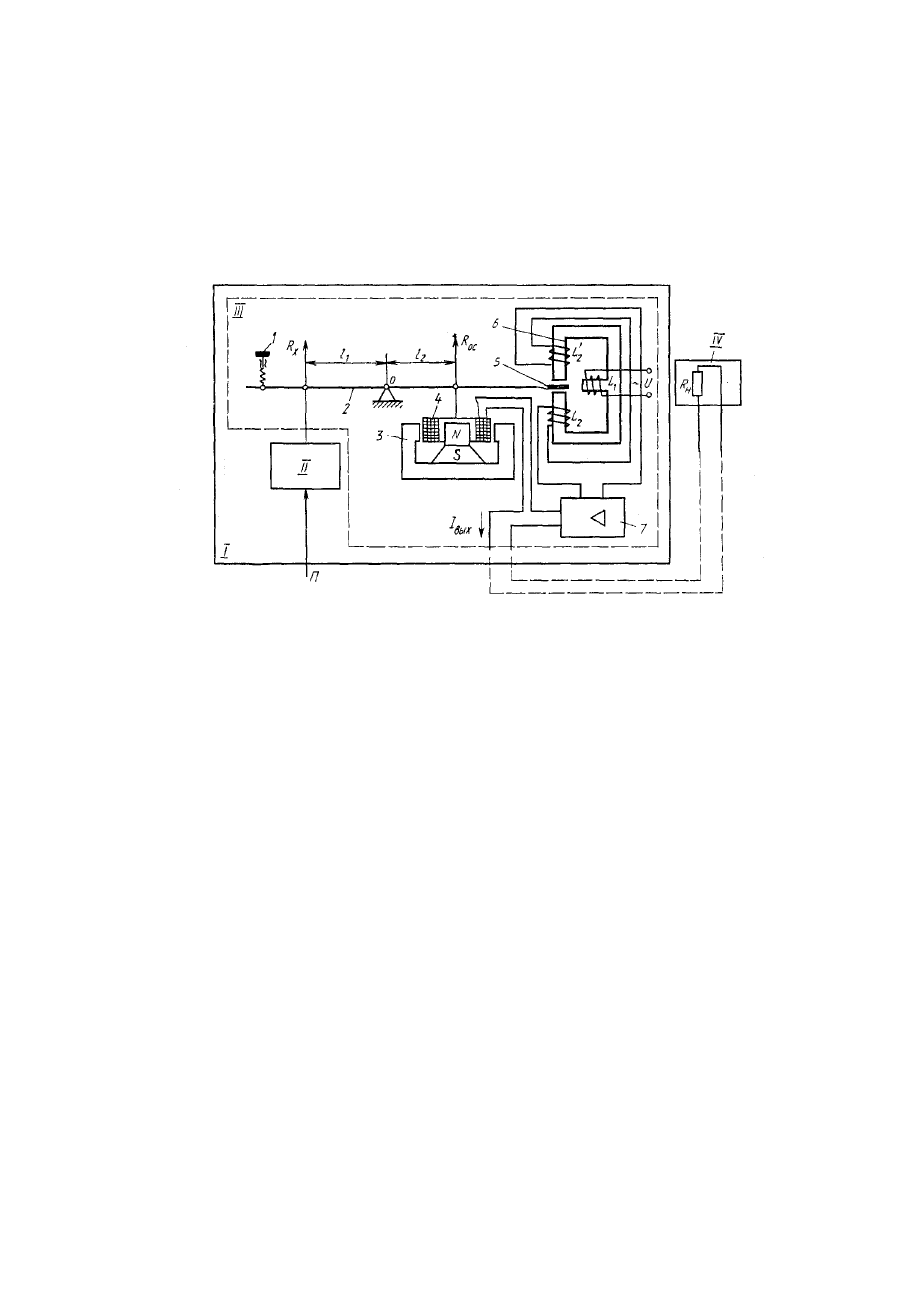
ПИП включает (рис. 5.6) чувствительный элемент // и преобразователь «сила —
ток» ///.
Измеряемая величина П преобразуется чувствительным элементом // в
усилие R
x
. Это усилие через рычаг 2 уравновешивается усилием обратной связи
R
ос
, развиваемым магнитоэлектрическим
Рис. 5.6. Схема электрической системы передачи измерительной инфор-
мации с преобразователем «сила — ток»
преобразовательным элементом. Магнитоэлектрический преобразо-
вательный элемент состоит из стержневого постоянного магнита NS с П-
образным магнитопроводом 3, в зазоре между постоянным магнитом NS и
магнитопроводом расположена круглая рамка 4, жестко закрепленная на рычаге
2. Обмотка рамки соединена с выходом электронного усилителя 7. Вход
электронного усилителя соединен со вторичными обмотками L
2
и
2
L
′
индикатора перемещения 6 рычага 2. Индикатор перемещения выполнен в виде
дифференциально-трансформаторного преобразователя, на первичную обмотку
LI которого подается питание с электронного усилителя.
При изменении значения П равновесие рычажной системы нарушается,
что приводит к перемещению рычага и укрепленного на нем сердечника 5 из
магнитомягкого материала. Перемещение сердечника преобразуется
индикатором перемещения 6 в электрический сигнал Δe, который поступает на
вход электронного усилителя 7. Последний усиливает и преобразует Δe в ток
I
ВЫХ
, подаваемый в линию связи и на вход элемента обратной связи — магнито-
электрического преобразовательного элемента. При протекании тока
130
l
вых
по катушке 4 магнитоэлектрического, преобразовательного элемента
формируется сила
выхос
BnlIR =
(5.15)
где В — магнитная индукция; l — средняя длина витка катушки; п — число
витков катушки.
Перемещение рычага 2 под действием сил R
x
и R
ос
происходит до тех пор,
пока не наступит состояние равновесия:
21
lRlR
осx
=
(5.16)
В состоянии равновесия выходной сигнал преобразователя «сила — ток»
связан с силой R
x
зависимостью
Bnll
l
I
вых
2
1
=
(5.17)
Уравнение (5.17) представляет собой статическую характеристику
преобразователя «сила — ток». Принимая во внимание статическую
характеристику (5.5) чувствительного элемента, запишем уравнение (5.17)
следующим образом:
ПkП
Bnll
kl
I
Пвых
==
2
01
(5.18)
где k
o
— коэффициент преобразования чувствительного элемента;
k
П
=
Bnll
kl
2
01
— коэффициент преобразования ПИП.
Уравнение представляет собой статическую характеристику ПИП.
Путем изменения коэффициента k
П
можно изменять диапазон измерений
преобразователя в пределах ± (10—20) %. Как и в пневматических
преобразователях, изменение k
П
достигается изменением отношения l
1
/l
2
.
Для преобразователя, настроенного на заданный диапазон измерений,
например 0—П
mах
, статическая характеристика имеет вид
max
П
П
kI
вых
=
(5.19)
где k — постоянный коэффициент, определяемый диапазоном изменения
выходного сигнала и равный 5 для ПИП с диапазоном изменения выходного
сигнала 0—5 мА.
Для ПИП с диапазоном измерений П
min
— П
mах
, статические
характеристики имеют вид
minmax
min
5
ПП
ПП
I
вых
−
−
=
(5.20)