Евсеев С.П., Курдыбайло С.Ф., Сусляев В.Г. Материально-техническое обеспечение адаптивной физической культуры (АФК)
Подождите немного. Документ загружается.

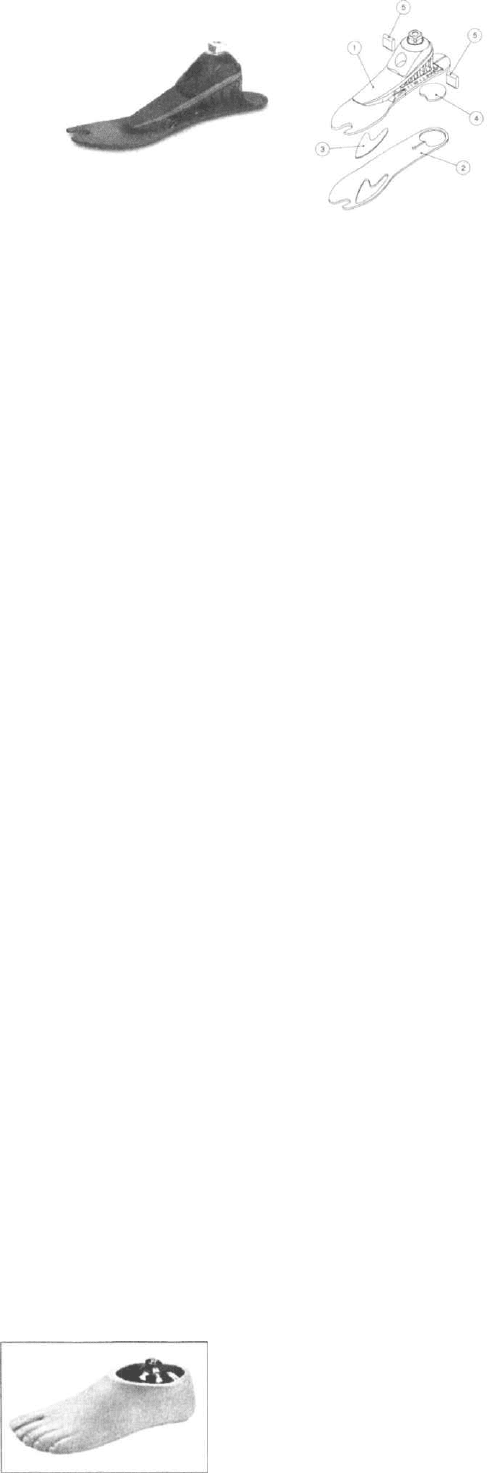
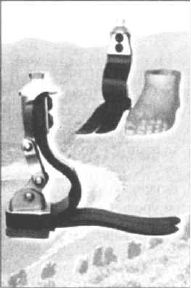
Рис. 126. Стопа Flex Foot Axia Обозначения: 1 — модуль стопы; 2 — подошва;
3 — подошва, вставляемый палец; 4 — подошва, вставляемая пятка; 5 — пяточный
амортизатор
Следующая конструкция стопы — К2 Sensation (рис. 127) — также
является мультиаксиальной. Она позволяет преодолевать наклонные
поверхности (например, пандус), неровности и т.д. Обеспечивает мягкий и
плавный перекат, снабжается интегрированным титановым пирамидным
адаптером, косметическая оболочка повторяет естественную форму стопы.
Высота стопы 7,9 см. Не требует какого-либо технического обслуживания и не
содержит регулируемых элементов.
Специальные конструкции стоп для занятий спортом. К ним относятся
модели Cheetah (Flex-Sprint III), Flex-Sprint (Flex-Sprint I), Flex-Run. Стопа
Cheetah (рис. 128) изготавливается только по индивидуальным заказам, может
применяться для различных видов спорта, обладает высокой энергоотдачей.
Предназначается в основном для спринтерского бега после ампутации на
уровне голени, но в отдельных случаях может использоваться после ампутации
на уровне бедра Благодаря уникальной функциональности эта стопа широко
используется профессиональными спортсменами. Так, например, Earle Connor
установил мировой рекорд в спринтерской дистанции 100 м (в классе Т42 АК),
используя эту стопу, в г. Леверкузене 1 июня 2003 г. Marlon Shirley также
использовал стопу Flex Foot Cheetah, когда установил мировой рекорд в беге на
100 м (в классе Т44 ВК) в Лилле в 2002 г. и побил этот рекорд в Юте в 2003 г.
121

Рис. 127. Стопа К2 Sensation
Рис. 128.Стопа Cheetah (Flex-Sprint 111)
Рис. 129. Стопа Flex-Sprint (Flex-Sprint I)
Следующая стопа, Flex-Sprint (рис. 129, 130), представляет собой
аналогичную конструкцию, но рассчитана на спортсменов, перенесших
ампутацию на уровне бедра.
Рис. 130. Схематичное изображение стопы Flex-Sprint (Flcx-Sprifit I) с
гидравлическим узлом Mauch
122
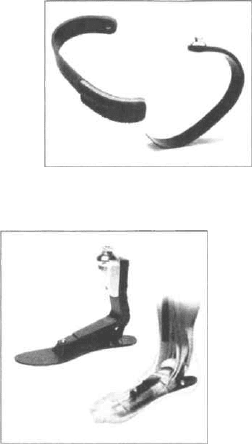
Рис. 131. Стопа Flex-Run
Рис. 132. Стопа Talux
Последняя конструкция стопы, Flex-Run (рис. 131), предназначена для бега
на большие дистанции, она отличается малым весом, большой отдачей энергии,
легко монтируется к протезам голени или бедра.
Конструкция стопы, получившая название Talux (рис. 132), воплощает в
себе многие анатомические особенности человеческой стопы. Искусственная
стопа обладает хорошим перекатом, подходит в основном для пациентов со
средним уровнем двигательной активности, перенесшим ампутацию на уровне
голени или бедра. Средняя часть конструкции обеспечивает хорошую
устойчивость и амортизацию благодаря изгибу ее подошвы. Высота стопы 169
мм. Схематично конструкция стопы представлена на рис. 133.
Среди самых последних разработок концерна Ossur, воплотивших
современные достижения науки и техники, следует отметить стопу Propriofoot.
Это первая в мире конструкция искусственной стопы со встроенной системой
искусственного интеллекта. Она открывает новый физиологически
ориентированный подход к протезированию после ампутации на уровне голени.
Стопа Propriofoot обладает способностью настраиваться на различные режимы
ходьбы, подъем и спуск по лестнице, по наклонной поверхности, облегчает
стояние, переход в положение сидя и вставание и в дальнейшем обеспечивает
123
свободное и уверенное передвижение. Она способствует улучшению
равновесия и симметрии ходьбы, что в целом делает ходьбу более
естественной.
Конструкция стопы создана на основе новой концепции создания
протезных изделий, которая нашла свое воплощение в технологии Bionic.
Применительно к сфере протезирования эта концепция открывает новые
перспективы и возможности в плане реализации стремления к возможно более
полной интеграции электронных и механических компонентов с человеческим
организмом. Одним из фундаментальных понятий этой области знаний
является искусственный интеллект. Хорошо известно, что усечение конечности
существенно нарушает биомеханические взаимосвязи и локомоторные акты,
использование же новой технологии Ossur позволяет в значительной мере
компенсировать утраченные функции и повысить эффективность
протезирования.
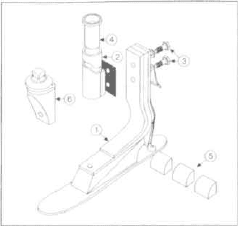
Рис. 133. Конструкция стопы Talux Обозначения: 1 —модуль стопы; 2—
трубка из углеродного волокна диаметром 30 мм; 3 — соединительные болты; 4 —
втулка; 5 — клиновидный амортизатор Talux; 6 — пирамидальный адаптер
Механическая часть конструкции стопы обеспечивает сгибание в
голеностопном шарнире до 10° и разгибание до 18°. Система искусственного
интеллекта обладает возможностью к самообучению, по мере пользования она
накапливает информацию о стиле ходьбы, типах и особенностях преодоления
препятствий и т.д. Конструкция обеспечивает подпружиненную походку
аналогично человеческой стопе, способствует естественному переносу массы
тела в процессе ходьбы, при переходе в положение сидя и при вставании. В
124
положении стоя стопа автоматически настраивается, обеспечивая естественное
статическое положение тела.
В конструкции стопы встроены датчики-акселерометры, которые
производят измерение ускорения 1600 раз в секунду. При каждом шаге
осуществляется определение траектории в горизонтальной и вертикальной
плоскостях. Таким образом оказывается возможным охарактеризовать походку
как по траектории, так и по скорости движения. Эти данные используются для
дальнейшего управления ходьбой. С помощью специальных алгоритмов
определяется характер поверхности, положение человека в пространстве
(находится человек в положении стоя или сидя). Для анализа ходьбы
используется программный комплекс Terrain Logic
м
, который с помощью
специальных алгоритмов обеспечивает компенсацию утраченной
проприоцептивной функции. Terrain Logic
1
'
4
является запатентованной версией
искусственного интеллекта, который имитирует действия ЦНС. Данные от
различных датчиков обрабатываются процессором, в результате
вырабатывается сигнал, который управляет движением стопы как единого
целого. Накопленная информация обо всех выполненных когда-либо шагах и
движениях используется при выполнении нового шага. Процессор,
обрабатывающий поступающие сигналы, обладает большой точностью и
автоматически выбирает оптимальные параметры ходьбы. В фазе переноса
определяется скорость ходьбы, угол наклона при подьеме по ступенькам,
степень амортизации и др., помимо этого конструкция способна
приспосабливаться к различным видам обуви и высоте каблука
Система управления регулирует работу легкого двигателя, который
приводит подвижные элементы стопы к необходимому взаиморасположению.
Этот высокоточный привод, обладающий высоким быстродействией,
имитирует работу мускулатуры естественной конечности.
Несмотря на сложность конструкции, она ориентирована на простоту
использования, не требует каких-либо специальных настроек. При первом
применении достаточно 15 шагов для полной автоматической калибровки, т.е.
настройки. Высота каблука настраивается при помощи специальных клавиш на
125
передней поверхности корпуса стопы. Следует отметить, что искусственая
стопа рассчитана только на инвалидов, перенесших ампутацию на уровне
голени, со средним или высоким уровнем двигательной активности. Вес
конструкции 995 г, высота — 18 см. Высота каблука регулируется от 0 до 5 см.
Используется литий-ионный аккумулятор. Общий вид стопы представлен на
рис. 134.
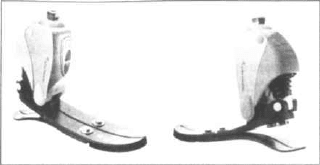
Рис. 134. Стопа Propriofoot концерна Ossur
Известной французской фирмой Proteor предлагается энергосберегающая
стопа под названием Cadence HP (рис. 135). Эта конструкция стопы отличается
от стопы с аналогичным названием и близкой по форме, выпускаемой
американской фирмой Seattle Systems, строением пяточной части. Стопа фирмы
Proteor является мультиаксиальной, изготовлена из углеродного композитного
материала, обеспечивает исключительную стабильность при ходьбе, хороший
возврат энергии даже при движении по неровной поверхности. Высота самой
стопы 178 мм, однако она может быть изготовлена с каблуком различной
высоты. Высота каблука может быть 6,4, 9,5 и 12,7 мм. Вес конструкции может
быть различным, в зависимости от интенсивности эксплуатации: при
интенсивном использовании он достигает 917 г, при малоинтенсивном — 831
г (включая косметическую оболочку).
Этой фирмой разработана еще одна конструкция энергосберегающей
стопы, получившая название DYNASTEP. Ее киль также выполнен из
углеродного волокна. Стопа обеспечивает хороший возврат энергии, снижает
утомление при длительной и интенсивной ходьбе, улучшает походку;
рассчитана на пациентов со средним уровнем двигательной активности,
ведущих активный образ жизни. Стопа используется с многоосной щиколоткой
126
1D111, что обеспечивает исключительно удобную ходьбу даже по неровной
поверхности. Конструкция стопы показана на рис. 136.
Французской фирмой Proteval разработано и выпускается несколько
разновидностей надежных, удобных в эксплуатации энергосберегающих стоп.
Энергосберегающие конструкции изготавливаются индивидуально, только на
заказ, могут использоваться при любом уровне ампутации.
Рис. 135. Энергосберегающая стопа Cadence HP фирмы Proteor
Для пациентов, перенесших ампутации по Шопару или по Сайму,
предлагаются соответствующие модели искусственных стоп, изготовленные из
углеродистого волокна (рис. 137). Минимальное расстояние от гильзы протеза
до поверхности опоры 1 5 мм Искусственная стопа крепится непосредственно к
гильзе протеза.
Следующая модель рассчитана на пациентов, перенесших ампутации по
Шопару или по Сайму II (рис. 138). Эта конструкция обладает небольшой
высотой, также изготовлена из углеродистого волокна, минимальное
расстояние от гильзы протеза до поверхности опоры 56 мм Стопа снабжена
титановым пирамидным адаптером.
Следующая конструкция рассчитана на пациентов, перенесших ампутации
по Сайму II (рис. 139), минимальное расстояние от гильзы протеза до
поверхности опоры 86 мм. Она также имеет небольшую высоту, снабжена
титановым пирамидным адаптером и амортизирующим элементом в пяточной
части, что в целом улучшает динамические качества искусственной стопы.
Последняя конструкция стопы — Advantage Low Profile (рис. 140) является
127

многоосной, рассчитана на пациентов, перенесших ампутации по Сайму.
Минимальное расстояние от гильзы протеза до поверхности опоры 86 мм,
конструкция снабжена титановым пирамидным адаптером.
Рис. 136. Стопа DYNASTEP с многоосной щиколоткой W i l l
Рис. 137. Стопа Proteval Cbopart
Рис. 138. Стопа Proteval Cbopart with pyramid / Super Low Profile Syme II
Рис. 139. Стопа Proteval Low Profile I Syme II
Рис. 140. Стопа Proteval Advantage Low Profile Multi
Следует отметить, что аналогичные по назначению, конструкции и
функциональным показателям искусственные стопы выпускаются axial foot
128

концерном ОТТО-ВОСК.
Помимо этого предлагается несколько конструкций искусственных стоп
для пациентов, перенесших диафизарные ампутации на уровне голени. Эти
стопы имеют различные варианты крепления к гильзе протеза: в виде
трубчатого адаптера, в виде пластины с четырьмя отверстиями для крепления
болтами, в виде пирамидного адаптера.
Первая стопа под названием Springlite II (рис. 141) имеет динамическую
вертикальную стойку, минимальное расстояние от гильзы протеза до
поверхности опоры 159 мм.
Вторая стопа — Springlite II Gold Medal (рис. 142) — также имеет
динамическую вертикальную стойку и динамическую пятку. Важной
особенностью данной конструкции является использование специальных
вкладышей, которые выпускаются в трех различных исполнениях и позволяют
изменять жесткость стопы. Расстояние от гильзы протеза до поверхности опоры
159 мм.
Рис. 141. Стопа Proteval Springlite 11
Рис. 142. Стопа Proteval Springlite II / Gold Medal
129

Рис. 143. Стопа Proteval Advantage DPI
Третья стопа — Advantage DP2 (рис. 143) — является многоосной, так же,
как и предыдущие конструкции, имеет динамическую вертикальную стойку,
допускающую ротацию до 16°, адаптирована для ходьбы по любой
поверхности, обладает высочайшими функциональными качествами и
обеспечивает эстетичность ходьбы. Минимальное расстояние от гильзы протеза
до поверхности опоры 165 мм.
Одной из ведущих фирм Австралии — Medipro — также разработаны и
предлагаются различные конструкции современных энергосберегающих стоп.
Эти стопы аналогичны по конструкции и функциональным возможностям, все
имеют высокоактивный внутренний киль. В их конструкции предусмотрена
возможность пронации и супинации стопы, аккумуляция энергии движения во
время касания пяткой поверхности опоры, сохранение энергии во время
переката и отдача ее во время отрыва носка стопы от поверхности опоры.
Закругленная передняя часть облегчает перекат стопы. Раздвоенный в передней
части киль стопы облегчает ходьбу по неровной поверхности. Возможность
небольшой ротации стопы облегчает повороты на протезе. Стопы рассчитаны в
основном на активных пользователей, дают возможность заниматься
спортивными играми, спортивной деятельностью.
Medipro выпускает стопы Flex A, Flex F, Flex V, Flex R и Flex E,
обладающие всеми вышеотмеченными достоинствами, но имеющие различную
высоту и вес, высота каблука у всех моделей составляет 1 см. Помимо этого в
стопе Flex Е предусмотрена возможность регулировки высоты каблука в
пределах от 0 до 5 см. Для этих стоп выпускается косметическая
полиуретановая оболочка с высокими косметическими свойствами весом 400 г.
130