Емельянов В.Ю. Методы моделирования стохастических систем управления
Подождите немного. Документ загружается.

33
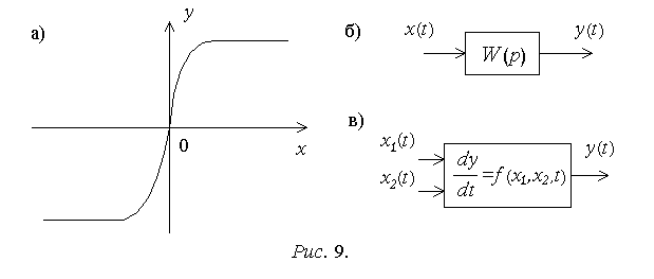
математической модели системы нелинейной статической характеристикой
(рис. 9,а), позволяющей для любого значения входного сигнала x получить
соответствующее значение выходного сигнала y. Такая форма описания
предполагает, что входные и выходные переменные могут меняться во вре-
мени, но для любого момента времени t значение "выхода" Y(t) зависит
только от значения “входа" X(t) в тот же момент времени. Другими слова-
ми, статические модели не учитывают предысторию описываемого процес-
са.
Динамические модели учитывают развитие процессов во времени, то
есть их предысторию. Их общий вид: Y(t)=f({Y(τ),τ<t},{X(τ),τ ≤ t}). Таким
образом, значение "выхода" Y здесь может зависеть и от своих значений в
предшествующие моменты времени, и от значений "входа" в рассматривае-
мый и предшествующие моменты времени. Так если рассматривается пре-
образование усилителем быстро изменяющихся сигналов, приходится учи-
тывать инерционность усилителя, и его модель задается в одной из форм,
представленных на рис. 9,б,в.
Динамические модели применяются для описания как отдельных эле-
ментов, так и систем в целом. Ниже им уделяется основное внимание.
Дискретизация моделей систем может осуществляться путем перехода к
дискретному времени или введения дискретного множества состояний. В
связи с этим различаются следующие варианты.
В непрерывных моделях, или D - схемах, множество состояний системы
и время являются непрерывными. Состояние модели описывается вектором
фазовых переменных, или переменных состояния,
X(t)=(x
1
(t),x
2
(t),…,x
n
(t)). Модель задается в форме системы диффе-
ренциальных уравнений, чаще всего системы уравнений 1-го порядка:

34
ttUtX
i
f
dt
t
i
dx
,,
, i=1,2,…,n,
y
j
(t)=ψ
j
(X(t)), j=1,2,…,m, (2.1)
где U(t)=(u
1
(t),u
2
(t),…,u
r
(t)) – вектор входных переменных; y
j
– выход-
ные переменные системы. Помимо дифференциальных уравнений, для по-
строения и анализа непрерывных моделей систем управления используются
передаточные функции, частотные характеристики и др. Математический
аппарат исследования непрерывных моделей достаточно хорошо освещен в
технической литературе [3, 11, 32, 39].
Если рассматриваются непрерывное множество состояний и дискрет-
ное время, строятся модели дискретных, или импульсных, систем. При этом
предполагается возможность изменения значений всех или некоторых пере-
менных состояния в моменты времени, разделенные некоторым тактом или
шагом T
0
. Непрерывные функции времени x(t) здесь заменяются решетча-
тыми функциями x(n), n= 0,1,…, причем
0
1 Tn
. Для таких моделей ис-
пользуется аппарат разностных уравнений, импульсных передаточных функ-
ций и псевдочастотных характеристик, также детально разработанный в рам-
ках теории управления [3, 4, 11, 32].
Модели с дискретными состояниями и дискретным временем строятся
на основе теории конечных автоматов и марковских цепей [1, 37, 42]. При
построении модели в форме конечного автомата вводятся дискретные ко-
нечные множества: состояний Z, входных сигналов X и выходных сигналов Y.
Если рассматривается детерминированный конечный автомат (F-схема),
задаются функция переходов (z,x), формализующая правила смены со-
стояний автомата, и функция выходов, (z,x), формализующая правила
формирования выходного сигнала на очередном такте работы автомата.
Модели с дискретными состояниями и непрерывным временем строят-
ся на основе теории марковских процессов или Q-схем [1, 9, 37, 40]. Задается
дискретное конечное множество состояний системы X=(x
1
,x
2
,…,x
n
).
Рассматриваются только случайные процессы смены состояний. Для качест-
венного описания процесса используется граф смены состояний, для коли-
чественного описания – переходные вероятности или интенсивности смены
состояний (рис. 10).
Для сложных динамических систем применяются более сложные спосо-
бы дискретизации. Один из вариантов – построение модели динамической
системы со случайной структурой [19].

35
Модель строится в непрерывном
времени. Вводится дискретное конеч-
ное множество состояний системы
Y=(y
0
,y
1
,…,y
L
), которые называют
также фазами движения или режима-
ми работы. Каждому состоянию соот-
ветствует определенный вектор не-
прерывных фазовых переменных
X
(l)
(t) =
(x
1
(l)
(t),x
2
(l)
(t),…,x
n
(l)
(t)),
l=1,2,...,L,
и система дифференциальных уравнений вида (2.1):
l
lll
i
l
i
yttUtXf
dt
tdx
,,
,
y
j
(t) = ψ
j
(l)
(X
(l)
(t)), i=1,2,...,n; j=1,2,...,m; l=1,2,...,L. (2.2)
Частным случаем модели со случайной структурой является модель
динамической разрывной системы (схема ДРС), в которой векторы X
(l)
имеют одинаковую размерность для всех фаз движения [13]. Схема ДРС мо-
жет рассматриваться как двухуровневая комбинированная схема построения
модели, где на нижнем уровне используется D-схема, на верхнем – одна из
дискретных схем.
По характеру моделируемых процессов различают детерминированные
и стохастические модели. Если для характеристик внешних воздействий и всех
элементов моделируемой системы могут рассматриваться фиксированные
значения, а процессы в системе подчиняются известным жестким законо-
мерностям, строят детерминированные модели. В случаях, когда требуется
учет случайных внешних воздействий, значений параметров системы или
начальных условий, строят стохастические модели.
Так, если правила смены состояний конечного автомата являются жест-
кими, используется детерминированная F-схема. Стохастический конечный
автомат называется вероятностным автоматом (P-схемой). У вероятностного
автомата правила смены состояний не являются жесткими. Для каждого воз-
можного сочетания состояния автомата и входного сигнала задается распре-
деление вероятностей переходов в другие состояния [29].
В свою очередь, на основе D-схемы могут быть построены как детер-
минированные, так и разнообразные стохастические модели.

36
Существенное значение для выбора математического аппарата модели
имеет нестационарность как самой системы, так и исследуемого процесса.
Нестационарные модели, как правило, не допускают получения результата
путем аналитических преобразований и требуют пошагового решения сис-
тем уравнений приближенными методами.
Для детерминированной задачи стационарная модель может быть по-
строена для любой стационарной системы, то есть системы, параметры ко-
торой не изменяются на моделируемом интервале времени.
Для стохастической задачи, где учитываются случайные внешние воз-
действия, стационарная модель и соответствующий математический аппарат
могут использоваться даже для стационарной системы только при расчете
установившегося процесса и при условии, что внешние воздействия стацио-
нарны.
Линейность или нелинейность модели определяется необходимостью
учета нелинейности отдельных элементов моделируемой системы. Приве-
денные выше для D-схемы уравнения (2.1) задают нелинейную модель. Ли-
нейная D-схема будет иметь вид
tUtBtXtA
dt
tdX
, Y(t)=C(t)X(t),
где A, B и C – матрицы коэффициентов.
Рассмотрим подробнее некоторые математические схемы, применяе-
мые при построении моделей сложных стохастических систем, но не изучае-
мые обычно в рамках курса "Теория автоматического управления".
2.3. Детерминированные конечные автоматы и их применение при
построении моделей сложных систем
Математическая F-схема, или детерминированный автомат [42], являет-
ся удобной формой описания логических закономерностей развития процес-
сов в системе, но не учитывает фактор случайности. Поэтому она обычно
используется для моделирования подсистем контроля и управления и позво-
ляет решать задачи разработки, проверки и оценки качества реализуемых
ими алгоритмов принятия решения, выбора закона управления или измене-
ния структуры системы.
F-схема задается в форме следующей совокупности:
F=(X,Z,Y,,), (2.3)

37
где Z=(z
1
,z
2
,…,z
I
) – множество состояний, или внутренний алфавит;
X=(x
1
,x
2
,…,x
J
) – конечное множество входных сигналов, или входной
алфавит; Y=(y
1
,y
2
,…,y
L
) – конечное множество выходных сигналов, или
выходной алфавит; =(z,x) - функция переходов, описывающая законо-
мерности смены состояний; =(z,x) – функция выходов, описывающая
закономерности формирования выходных сигналов. Если множество состоя-
ний является конечным, автомат (2.3) называется конечным. Конечный авто-
мат представляет собой абстрактную математическую схему. Поэтому при-
рода состояний и сигналов безразлична.
Теория автоматов получила свое первоначальное развитие в тесной
связи с разработкой логических схем цифровой вычислительной техники. Для
ее применения при построении моделей систем управления целесообразно
уточнить смысл некоторых терминов.
С позиций теории управления конечный автомат может рассматривать-
ся как "черный ящик" с одним входом и одним выходом. На вход подается
сигнал x, а с выхода снимается сигнал y (рис. 11). Сигналы x и y могут при-
нимать только фиксированные значения. Возможные значения входного
сигнала образуют дискретное конечное множество X, значения выходного –
дискретное конечное множество Y.
38
Другая, расширенная, трактовка понятия автомата допускает наличие
нескольких входов или выходов. Так например, допустим наличие у автомата
M входных каналов с собственными алфавитами X
(m)
=(
m
x
1
,
m
x
2
,...,
m
J
m
x
).
Тогда алфавит X вводится как произведение алфавитов:
X=X
(1)
×X
(2)
×…×X
(M)
, то есть символами алфавита X объявляются все воз-
можные сочетания элементов алфавитов X
(m)
по одному из каждого. Коли-
чество элементов в X в результате составит
M
m
m
JJ
1
.
Аналогичный прием может быть использован в предположении, что
имеется несколько выходных каналов. В любом случае сохраняется общий
вид представления автомата в форме (2.3).
Далее будет использоваться терминология, принятая в теории автом а-
тов, которую следует воспринимать с учетом этих замечаний.
Процесс в конечном автомате рассматривается в дискретном времени,
единицей измерения которого является такт. В течение такта значения всех
сигналов сохраняются постоянными. При наступлении следующего такта
может измениться входной сигнал x. В зависимости от его значения в соот-
ветствии с жесткими правилами, заданными функцией переходов, может
измениться или сохраниться состояние автомата z. Одновременно в соответ-
ствии с жесткими правилами, заданными функцией выходов, формир уется
новый выходной сигнал y. Величина такта не обязательно является постоян-
ной (рис. 11).
Рассмотрим простейшие и наиболее широко используемые виды ко-
нечных автоматов.
1. Автомат Мили имеет функции переходов и выходов следующего ви-
да:
z[n+1]=(z[n],x[n]), y[n]=(z[n],x[n]), (2.4)
где n=0,1,2,... – номер такта. Таким образом, в автомате Мили новое состоя-
ние и выходной сигнал выбираются в зависимости от сочетаний текущего
состояния и входного сигнала.
Рассмотрим пример автомата Мили, используя для задания функций
переходов и выходов табличный, графический и матричный способы.
При табличном способе для функции переходов задается таблица пере-
ходов (табл. 1), а для функции выходов – таблица выходов (табл. 2). Строки
таблиц соответствуют элементам входного алфавита, а столбцы – элементам
39
внутреннего алфавита. Позиция таблицы переходов, соответствующая i-му
столбцу и j-й строке, – это новое состояние, в которое переходит автомат,
если в момент прихода входного сигнала x
j
он находился в состоянии z
i
, а
аналогичная позиция таблицы выходов – формируемый при этом выходной
сигнал.
Та б л ица 1
Та б л ица 2
Таблица переходов автомата Мили
Таблица выходов
Входные
сигналы
Состояния
Входные
сигналы
Состояния
z
1
z
2
z
3
z
1
z
2
z
3
x
1
z
2
z
3
z
1
x
1
y
1
y
1
y
3
x
2
z
1
z
1
z
3
x
2
y
2
y
2
y
1
При матричном способе обе функции задаются одной матрицей соеди-
нений C размерностью I×I, строки которой соответствуют исходным со-
стояниям z[n], столбцы - состояниям на следующем такте z[n+1]. Элемен-
ты матрицы задаются в виде дроби, в числителе которой указывают входной
сигнал, вызывающий соответствующий переход, а в знаменателе - форми-
руемый при таком переходе выходной сигнал. Вместо элементов, соответст-
вующих невозможному для данного автомата переходу, ставится прочерк:
1
2
3
1
1
1
2
2
1
1
2
2
y
x
y
x
y
x
y
x
y
x
y
x
C
.
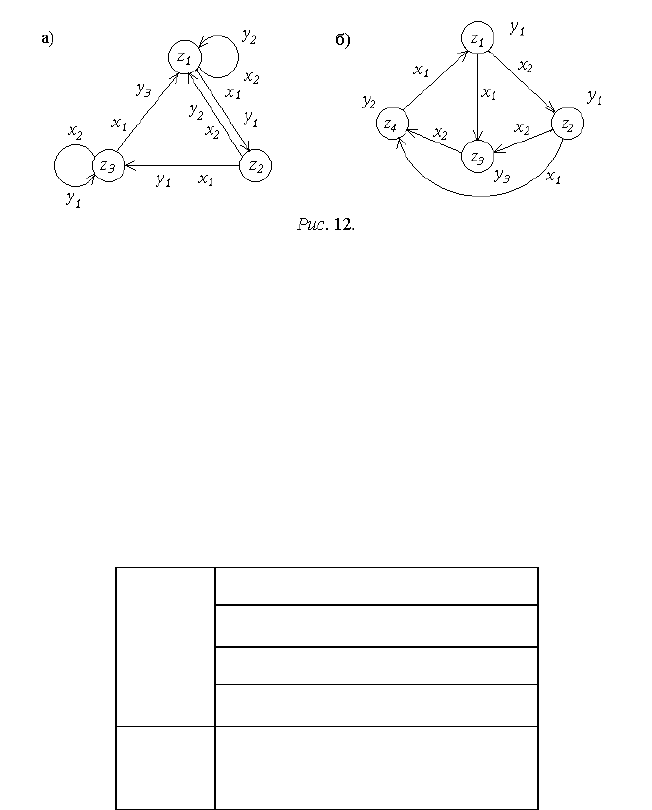
При графическом способе автомат Мили задается графом (рис. 12,а),
вершины которого соответствуют возможным его состояниям. Каждая вер-
шина имеет J исходящих дуг, соответствующих вариантам смены или сохр а-
нения состояний при различных входных сигналах x
j
(j=1,2,...,J). Около
каждой дуги указывают соответствующие ей входной и выходной сигналы.
Отметим, что количества позиций таблицы переходов, позиций таблицы
выходов, задаваемых элементов матрицы соединений и дуг графа для автома-
та Мили одинаковы.
40
2. У автомата Мура функции переходов и выходов имеют вид
z[n+1]=(z[n],x[n]), y[n]=(z[n]). (2.5)
Таким образом, здесь новое состояние определяется аналогично авто-
мату Мили, а выходной сигнал зависит только от текущего состояния автома-
та. Способы задания автомата Мура также рассмотрим на примере.
Автомат Мура может задаваться таблицей переходов (табл. 3), которая,
за исключением верхней строки, составляется аналогично табл. 1. В верхней
строке табл. 3 указываются выходные сигналы, связанные с элементами вто-
рой строки в соответствии с функцией выходов.
Та б л ица 3
Таблица переходов автомата Мура
Выходные сигналы
Входные
сигналы
y
1
y
1
y
3
y
2
Состояния
z
1
z
2
z
3
z
4
x
1
z
3
z
4
z
3
z
1
x
2
z
2
z
3
z
4
z
4
Другие варианты задания автомата Мура – граф (рис. 12,б) или матрица
соединений C и вектор выходов Y:

41
21
21
12
12
xx
xx
xx
xx
C
,
2
3
1
1
y
y
y
y
Y
. (2.6)
3. В автономном автомате отсутствуют входные сигналы:
F=(Z,Y,,), z[n+1]=(z[n]), y[n]=(z[n]). (2.7)
Его удобнее всего задать графом, у которого каждой вершине (состоянию
автомата) соответствует одна и только одна выходная дуга и определенный
выходной сигнал, или соответствующей таблицей.
Следует отметить, что в любом конечном автономном автомате состоя-
ния и выходные сигналы неизбежно начнут периодически повторяться, на-
чиная с некоторого такта. Длина такого периода не превышает количества
состояний автомата, а начальное состояние влияет только на номер такта,
начиная с которого наступает периодический процесс.
4. Автомат без памяти обеспечивает однозначное отображение входно-
го алфавита X в выходной Y:
F=(X,Y,), y[n]=(x[n]) (2.8)
и может быть задан вектором Y вида (2.6), размерность которого соответст-
вует размерности множества X, или соответствующей таблицей.
5. В автомате без выхода отсутствуют выходные сигналы:
F=(X,Z,), z[n+1]=(z[n],x[n]). (2.9)
Его функция переходов задается в форме таблицы, графа или матрицы.
В качестве примера рассмотрим автоматную модель устройства управ-
ления (УУ) системы обеспечения безопасности движущегося объекта. В
зависимости от состояния внешней среды, информация о которой поступает
от устройств информационной подсистемы, УУ в соответствии с жестким
алгоритмом определяет необходимые меры безопасности (маневр, останов-
ка, активное воздействие на внешнюю среду и др.) и формирует команды
управления для устройств исполнительной подсистемы.
Будем рассматривать каждый физический вход УУ, на который посту-
пает сигнал от какого-либо устройства информационной подсистемы, как
один из M входных каналов автомата. Входной алфавит автомата X введем
как произведение алфавитов входных каналов: X=X
(1)
×X
(2)
×…×X
(M)
. Оче-
видно, реальные сигналы от различных устройств могут быть как дискретны-
ми, так и непрерывными и иметь разные диапазоны изменения. Независимо
от этого набор элементов в абстрактном m-м входном алфавите выбирается в
42
соответствии с количеством J
m
значений или диапазонов сигнала, различае-
мых УУ при выработке решения.
Элементы выходного алфавита Y=(y
1
,y
2
,…,y
L
) будут соответство-
вать вариантам мер безопасности, предусмотренных алгоритмом УУ.
В зависимости от особенностей алгоритма УУ задается внутренний ал-
фавит Z=(z
1
,z
2
,…,z
I
) и строится автомат вида (2.3), (2.8) или (2.9). В про-
стейшем случае строится автомат без памяти (2.8).
2.4. Вероятностные автоматы и марковские цепи
Вероятностный автомат (P-схема) - это конечный автомат, в котором за-
кономерности смены состояний и формирования выходного сигнала имеют
статистический характер [22, 29].
Пусть заданы множество входных сигналов автомата X размерностью J,
множество состояний Z размерностью I и множество выходных сигналов Y
размерностью L. Введем новое множество G, элементами которого являются
пары x
j
z
i
, и новое множество Ф, элементами которого являются пары z
i
y
l
.
Очевидно, множество G будет иметь размерность K=IJ, а множество Ф -
размерность S=IL.
Для вероятностного автомата любой элемент множества G индуцирует
на множестве Ф дискретный закон распределения (p
k1
,p
k2
,…,p
kS
). Авто-
мат может быть задан совокупностью
P=G,Ф,В=X,Z,Y,В, (2.10)
где B=║p
ks
║- матрица переходных вероятностей размерностью K×S.
Элементы матрицы B должны отвечать следующим условиям:
0
≤
p
ks
≤
1, k =1,2,...,K; s =1,2,...,S;
1
1
S
s
ks
p
, k =1,2,...,K.
Вместо матрицы B может быть задана таблица переходных вероятно-
стей. Строки матрицы B и таблицы переходных вероятностей соответствуют
элементам множества G, столбцы - элементам множества Ф.
Таким образом, если в детерминированном автомате заданной последо-
вательности входных сигналов x(1),x(2),…,x(n) будет соответствовать оп-
ределенная жесткая последовательность выходных сигналов
y(1),y(2),…,y(n), то в вероятностном автомате такая последовательность