Ельперін І.В., Пупена О.М., Місюра М.Д., Швед С.М. Контролери та їх програмне забезпечення (на укр. языке)
Подождите немного. Документ загружается.


МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ХАРЧОВИХ ТЕХНОЛОГІЙ
ЗАТВЕРДЖУЮ
Ректор ___________ Українець А.І.
(Підпис) (Прізвище, ініціали)
„____” _____________20__р.
КОНТРОЛЕРИ ТА ЇХ ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ
МЕТОДИЧНІ ВКАЗІВКИ
до виконання курсового проекту
для студентів спеціальностей
6.092500 “Автоматизоване управління технологічними процесами”,
“Комп’ютерно-інтегровані технологічні процеси і виробництва”
денної та заочної форм навчання
Реєстраційний номер СХВАЛЕНО
електронних методичних на засіданні кафедри
вказівок у НМУ 37.04-05.12.2008 автоматизації і комп’ютерно-
інтегрованих технологій
Протокол № 5
від 25.11.2008 р.
Київ НУХТ 2008
Контролери та їх програмне забезпечення: Метод. вказівки до виконання
курс. проекту для студ. спец. 6.092500 “Автоматизоване управління
технологічними процесами” і “Комп’ютерно-інтегровані технологічні процеси і
виробництва” ден. та заоч. форм навчання /Уклад.: І.В. Ельперін, О.М. Пупена,
М.Д. Місюра, С.М. Швед - К.: НУХТ, 2008.- 36 с.
Рецензент Б.М. Гончаренко, д-р. техн. наук, професор
Укладачі: І.В. Ельперін, канд.техн.наук
О.М. Пупена, канд.техн.наук
М.Д. Місюра
С.М. Швед
Відповідальний за випуск А.П. Ладанюк, д-р техн. наук, проф.
1. ЗАГАЛЬНІ ВІДОМОСТІ
1.1. Мета та завдання курсового проектування
Мета курсового проекту - зміцнити й поглибити знання зі створення систем
керування на базі мікропроцесорних промислових контролерів.
Основним завданням курсового проекту є розроблення прикладного
програмного забезпечення для різних типів контролерів.
Під час виконання курсового проекту студент повинен на основі аналізу
алгоритму функціонування об’єкта розробити алгоритм керування ним,
обґрунтувати вибір моделей і модифікацій мікропроцесорних контролерів та
розробити для них прикладне програмне забезпечення.
При цьому студент повинен продемонструвати вміння складати програмне
забезпечення з використанням різних технологічних мов програмування,
користуючись спеціалізованим програмним забезпеченням для програмування та
відлагоджування програм користувача.
1.2 Вихідні дані для розроблення курсового проекту
Завдання для виконання курсового проекту видає керівник у вигляді опису
алгоритму керування об‘єктом, який наведений у вигляді технологічної або
машинно-апаратурної схеми на яку нанесені датчики і виконавчі механізми з
переліком основних режимів роботи та функціональних вимог для забезпечення
нормальної роботи об’єкта керування.
Для одного і того самого об’єкта керування можуть бути запропоновані
різні експлуатаційні режими: запуск, забезпечення нормального функціонування
та реагування на виникнення різних нештатних та аварійних ситуацій.
Вимоги до функціонування об’єкта можуть бути задані у вигляді
технологічних режимних або рецептурних карт, а також функціональних
циклограм.
Однією із складових завдання на розроблення курсового проекту є
визначення процесів та алгоритмів, що підлягають імітаційному моделюванню
під час розроблення прикладного програмного забезпечення для
мікропроцесорних контролерів.
Під час затвердження завдання з керівником проекту узгоджується перелік
мікропроцесорних контролерів, для яких буде розроблятись програмне
забезпечення.
1.3 Зміст та основні етапи виконання курсового проекту
Курсовий проект виконується за кілька основних етапів:
перший - розроблення алгоритмічної структури (блок-схеми) алгоритму
керування об’єктом;
другий – вибір конфігурації контролера; наведення схеми підключення
датчиків, виконавчих механізмів та інших пристроїв системи управління до
вхідних і вихідних модулів контролера; складання таблиці зовнішніх змінних;
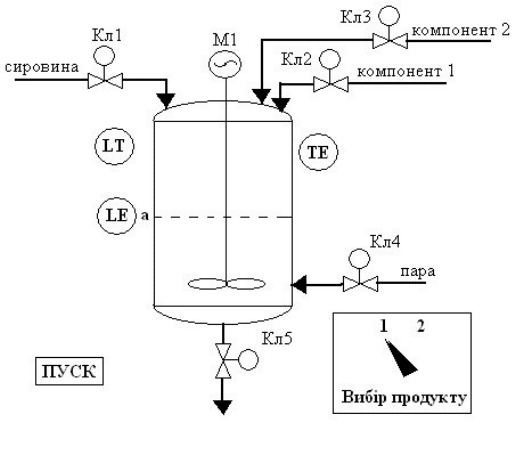
Рис.1. Схема об’єкта управління
третій - розроблення прикладного програмного забезпечення для реалізації
алгоритму керування; для різних типів мікропроцесорних контролерів;
четвертий - відлагодження програмного забезпечення на діючому
обладнанні.
Другий і третій етап виконуються для кожного вказаного контролера
окремо. Четвертий етап виконуються для одного контролера, вказаного
керівником.
Робота над проектом завершується його захистом з використанням
спеціалізованого програмного забезпечення або на реально діючому обладнанні.
Всі етапи відображаються у пояснювальній записці у вигляді схем, таблиць,
копій екранів, виконаних у режимі Print Screen, пояснювальної інформації, а
також текстів програм з необхідними коментарями.
2. ВКАЗІВКИ ДО ВИКОНАННЯ ОКРЕМИХ РОЗДІЛІВ ПРОЕКТУ
2.1. Розроблення алгоритмічної структури алгоритму керування
Алгоритмічна структура алгоритму керування складається для кращого
розуміння алгоритму управління, систематизації і структурування обробки
інформації, а також вироблення необхідної послідовності керуючих дій для
забезпечення нормального функціонування об’єкта. Алгоритмічна структура
алгоритму керування є універсальним носієм інформації і не залежить від
контролера, на якому цей алгоритм буде реалізований. Тому при описі
алгоритмічної структури і окремих її складових необхідно користуватись
загальними назвами інформаційних сигналів і керуючих дій. Наприклад: «Якщо
рівень в апараті досяг максимального значення», «Відкрити клапан подачі пари» і
т. ін.
Приклад виконання окремих етапів курсового проекту розглянемо для
об‘єкта, алгоритм функціонування якого наведений нижче.
Алгоритм функціонування.
Перед запуском робочого циклу
перемикачем вибирають «Вид
продукту».
Натискається кнопка «Пуск».
Якщо апарат порожній починається
робочий цикл, якщо ні – закриваються
всі клапани крім Кл 5 і апарат
спорожнюється. Коли апарат стане
порожнім Кл 5 закривається і
відкривається Кл 1. Сировина
заповнює апарат до рівня «а». Після
цього Кл 1 закривається і включається
мішалка М1. Далі процес залежить від
вибору типу продукту. Якщо вибраний тип продукції №1, відкривається Кл 2 і
компонент 1 заповнює апарат до L
зад
, який дорівнює 80% за показами рівнеміра
LT. Кл 2 закривається, повністю відкривається аналоговий Кл 4 і пара починає
поступати в апарат. Коли температура в апараті досягне заданого значення
t
зад
=70
о
С (діапазон вимірювання температури 0 – 120
о
С) включається регулятор
температури, який підтримує задане значення на протязі 15 хвилин. Після чого
регулятор відключається, Кл 4 повністю закривається, відкривається Кл 5 і апарат
спорожнюється. Після чого апарат може бути використаний для наступного
робочого циклу. Робочий цикл для продукції №2 відрізняється тим, що в апарат
подається компонент №2, з параметрами: L
зад
= 90%, t
зад
=75
о
С.
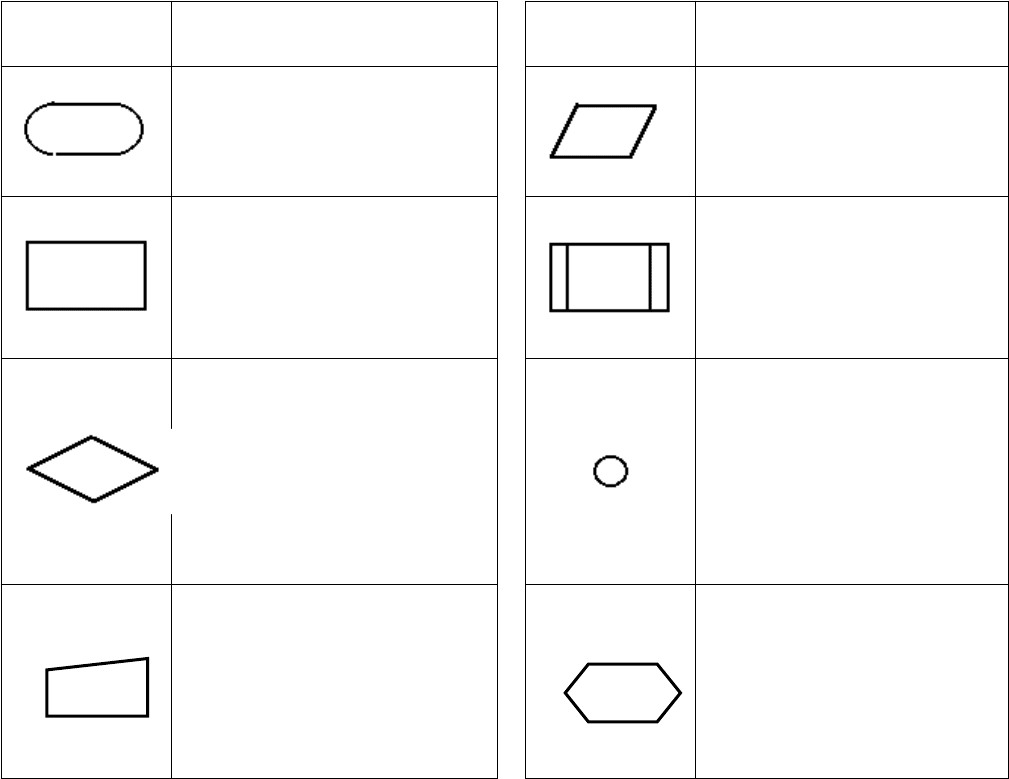
Для зображення алгоритму керування у вигляді алгоритмічної структури
використовуються загальноприйняті умовні позначення, які застосовуються для
опису алгоритмів програмування. Основні позначення згідно з ГОСТ 19.701-90
наведено у табл. 1.
Таблиця 1
Умовне
позначення
Опис алгоритму
Умовне
позначення
Опис алгоритму
Термінатор. Вихід «до»
або вхід «з» зовнішнього
середовища. Початок або
кінець програми
Дані. Символ відобра-
жає дані, носій яких не
визначений
Символ відображає
функцію оброблення
даних будь-якого виду.
Виконання однієї або
групи операцій
Символ відображає
наперед визначений
процес, що складається
з однієї або групи
операцій
Символ відображає рі-
шення або функцію
перемикального типу.
Визначає, по якому з
кількох альтернативних
виходів піде виконання
алгоритму далі
З’єднувач. Відображає
вихід в одну частину
схеми або вихід з іншої.
Відповідні зєднувачі
повинні мати однакові
унікальні позначення
Ручне введення. Відо-
бражає дані, що
вводяться вручну з будь-
яких пристроїв
(клавіатура, кнопка,
перемикач тощо)
Підготовка. Символ
відображає модифі-
кацію команди з метою
впливу на наступну
функцію (модифікація
індексу)
Приклад блок-схеми алгоритму управління для наведеного об’єкта
представлений на рис.2.
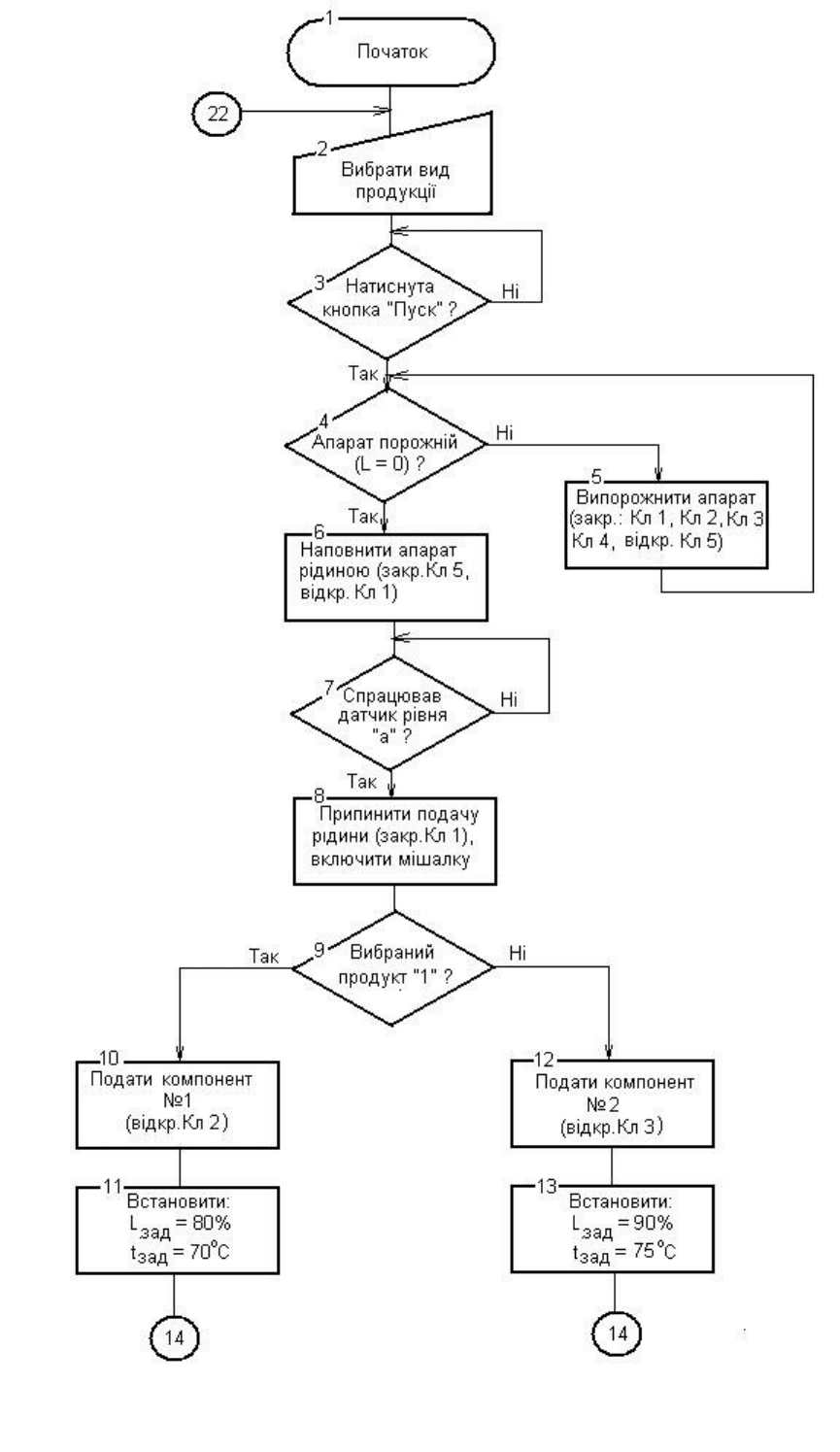
Рис 2 Блок-схема алгоритму управління
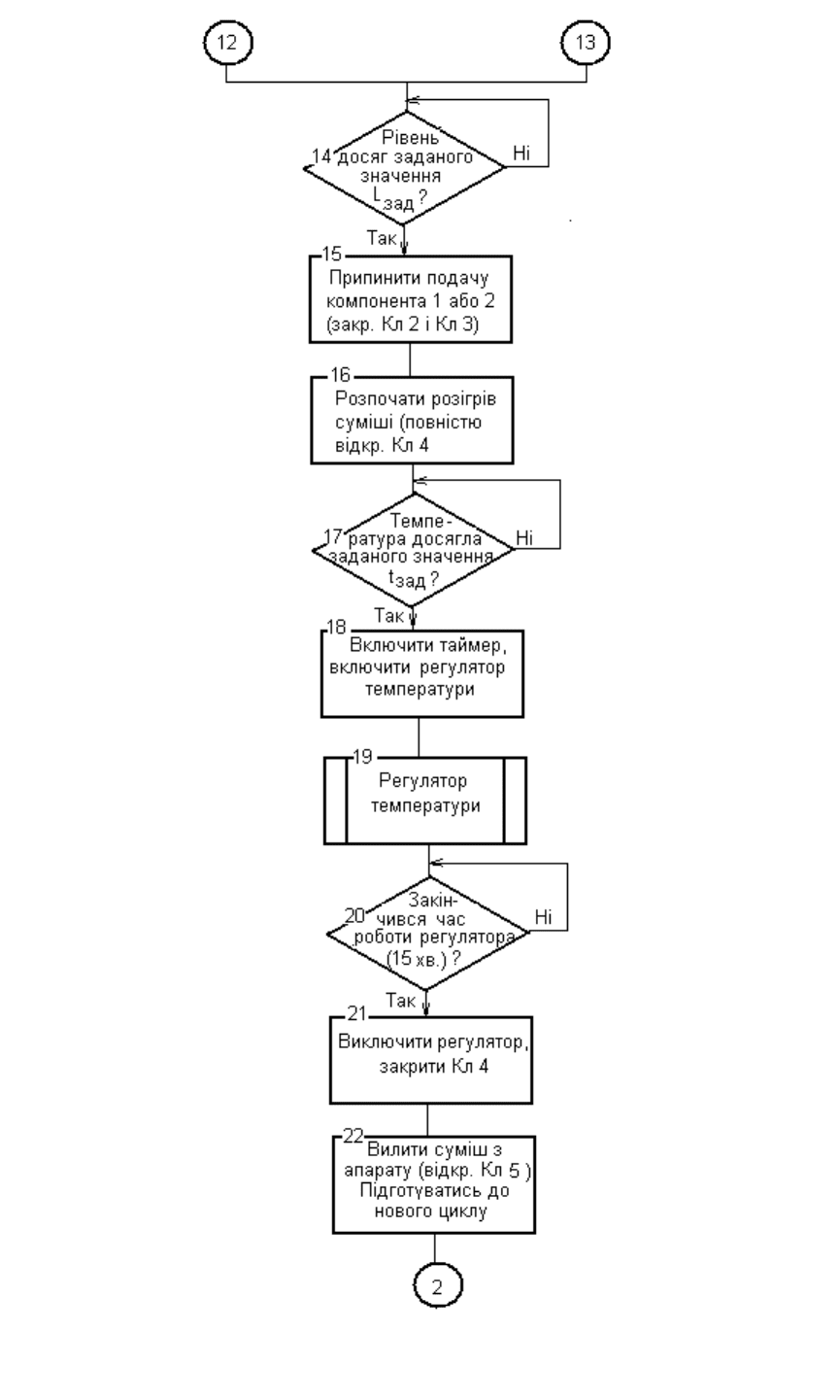
Рис 2 Блок-схема алгоритму управління (продовження)
2.2. Вибір конфігурації контролера і схем підключення
2.2.1. Схема автоматизації
Для вибору моделі контролера і його конфігурації необхідно визначитись з
переліком технічних засобів автоматизації, які будуть використовуватись для
реалізації алгоритму управління. При цьому дуже важливо знати параметри
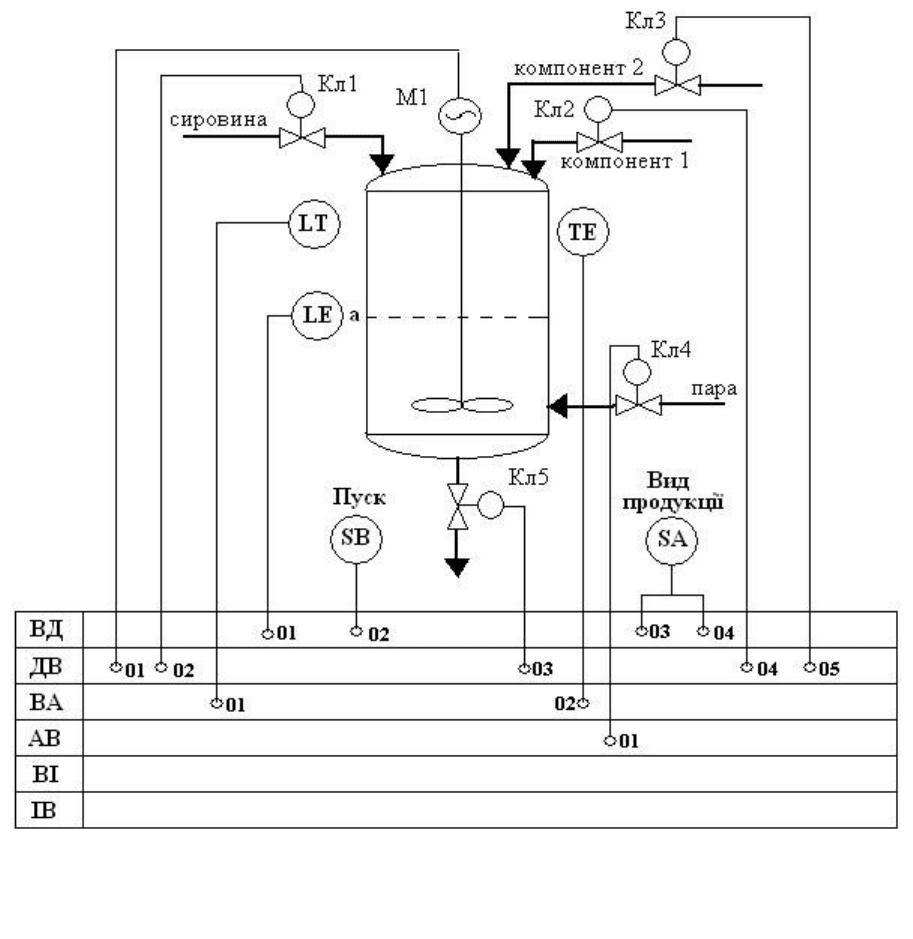
сигналів від датчиків і на виконавчі механізми. На рис. 3 наведена спрощена
функціональна схема автоматизації на якій показані датчики і виконавчі
механізми, а також типи сигналів для їх підключення до мікропроцесорного
контролера (МПК).
Вибір технічних засобів.
1. Для неперервного вимірювання рівня (LT) – ультразвуковий рівнемір з
вихідним сигналом 0 – 20 мА. При підключенні до МПК - вхідний
аналоговий сигнал (01).
Рис. 3. Спрощена схема автоматизації:
ВД – входи дискретні; ДВ – виходи дискретні; ВА – входи аналогові; АВ –
аналогові виходи; ВІ – входи імпульсні; ІВ – імпульсні виходи
2. Для сигналізації досягнення рівня «а» (LЕ) - ємнісний сигналізатор рівня.
Вхідний дискретний сигнал (01).
3. Для вимірювання температури (ТЕ) – термометр опору з вбудованим
нормуючим перетворювачем і вихідним сигналом 0 – 20 мА. Вхідний
аналоговий сигнал (02).
4. Кнопка «Пуск» (SB) – вхідний дискретний сигнал (02).
5. Перемикач (виду продукції) (SА) – Два вхідних дискретних сигнали: 03 –
при виборі виду продукції №1, 04 - при виборі виду продукції №2.
6. Клапани Кл 1, Кл 2, Кл 3, Кл 5 – дискретні електропневматичні клапани.
4 дискретних вихідних сигнали – 01, 03, 04, 05.
7. Управління мішалкою за допомогою магнітного пускача. Дискретний
вихідний сигнал – 02.
8. Клапан Кл 4 – пневматичний клапан з аналоговим електропневматичним
перетворювачем. Управляючий сигнал 0 – 20 мА. Аналоговий вихідний
сигнал – 01.
Таким чином для управління об’єктом необхідно сконфігурувати МПК який
забезпечує підключення: 4 дискретних вхідних сигналів, 5 дискретних вихідних
сигналів, 2 вхідних аналогових сигналів 0 – 20 мА і 1 аналогового вихідного
сигналу 0 – 10 В.
2.2.2. Конфігурування МПК і схеми підключення зовнішніх пристроїв
2.2.2.1. МПК Ломіконт
Для реалізації алгоритму управління можна вибрати модель Ломіконта Л-
120 з наступною конфігурацією:
Модулі базового комплекту: ПРЦ7 і МП7.
Модулі входів-виходів:
- 1 модуль дискретних входів – ДЦП2. 16 входів, настроєний на роботу з
групами змінних 00 і 01;
- 1 модуль дискретних виходів – ЦДП2. 16 виходів, настроєний на роботу
з групами змінних 00 і 01;
- 1 модуль аналогових входів АЦП2. 16 входів, настроєний на роботу з
групами змінних 00 і 01. До групи входів 00 підключений 1 модуль
гальванічного розподілення РГ12. Для забезпечення можливості
підключення до РГ12 сигналів від датчиків рівня і температури 0 – 20 мА
на клемній колодці встановлюються резистори 400 Ом;
- 1 модуль аналогових виходів ЦАП2. 8 виходів, настроєний на роботу з
групою змінних 00 з сигналом 0 – 0-20 мА.
На рис. 4 – рис. 7 показані варіанти схем під‘єднання зовнішніх пристроїв
до відповідних модулів МПК. Схеми під‘єднання до окремих модулів Ломіконта
наведені у [1, сторінки 94-103] та [2, сторінки 36-43]. На схемі під‘єднання
дискретних виконавчих механізмів зроблено спрощення, яке полягає у тому, що
виконавчі механізми під‘єднані безпосередньо до дискретних виходів. При цьому
треба пам‘ятати, що дискретні вихідні модулі мають транзисторні
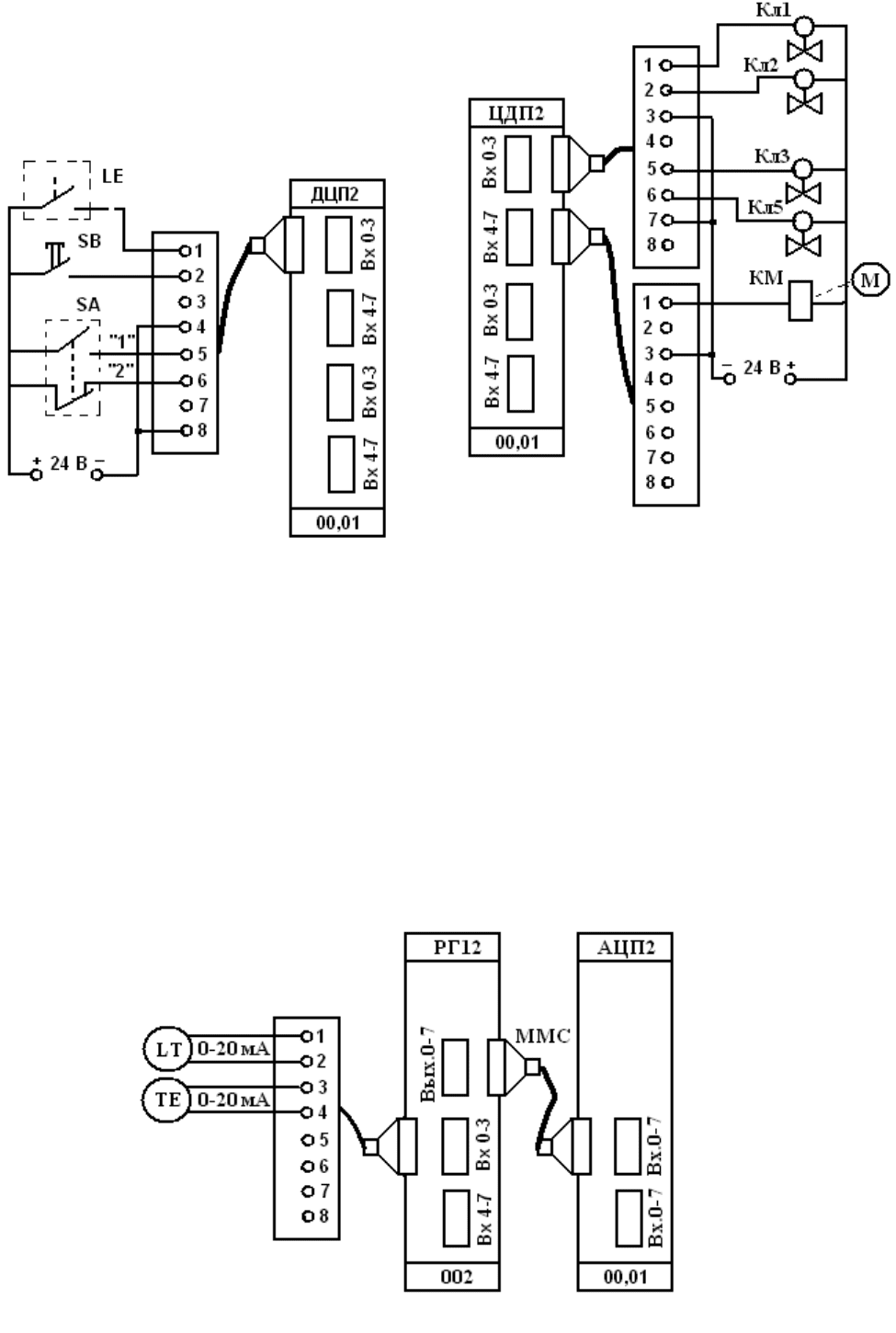
Рис.5. Схема під‘єднання дискретних
вихідних сигналів
Рис.6. Схема під‘єднання аналогових вхідних сигналів
ключі, які можуть комутувати ланцюги постійної напруги до 48 В
з струмом комутації тільки до 200 мА. Тому, якщо струм
спрацьовування виконавчого механізму є більшим необхідно
використовувати проміжне реле,
через контакти якого будуть
підключатись виконавчі
механізми.
Рис.4. Схема під‘єднання
дискретних вхідних сигналів