Дипломный проект - Проект шахтной многоканатной подъемной установки для для условий рудника Верхнекамского калийного месторождения
Подождите немного. Документ загружается.

D t x
,( )
x
2
if x
2
0
<
0
,
µ
y
−
x
2
x
4
−
( )
⋅
µ
z
x
2
x
6
−
( )
⋅−
c
y
x
1
x
3
−
( )
⋅−
m
x
c
z
−
x
1
x
5
−
( )
⋅
F
т
t
( )−
F
ст
−
m
x
+
...,
x
4
µ
y
−
x
4
x
2
−
( )
⋅
c
y
x
3
x
1
−
( )
⋅−
P
y
−
m
y
x
6
µ
z
−
x
6
x
2
−
( )
⋅
c
z
x
5
x
1
−
( )
⋅−
P
z
−
m
z
:=
Z rkfixed x 0
,
10
,
1000
,
D
,( ):=
j 1 990
..:=
t1
j
Z
j 1
,
:=
y4
j
Z
j 5
,
:=
y5
j
Z
j 6
,
:=
y6
j
Z
j 7
,
:=
y1
j
Z
j 2
,
:=
y2
j
Z
j 3
,
:=
y3
j
Z
j 4
,
:=
Вывод графика. Определение ускорений:
F3
j
µ
y
−
y4
j
y2
j
−
( )
⋅
c
y
y3
j
y1
j
−
( )
⋅−
P
y
−
m
y
:=
F2
j
if y2
j
0
<
0
,
µ
y
−
y2
j
y4
j
−
( )
⋅
µ
z
y2
j
y6
j
−
( )
⋅−
c
y
y1
j
y3
j
−
( )
⋅−
m
x
c
z
−
y1
j
y5
j
−
( )
⋅
F
т
t1
j
( )
−
F
ст
−
m
x
+
...,
:=
F4
j
µ
z
−
y6
j
y2
j
−
( )
⋅
c
z
y5
j
y1
j
−
( )
⋅−
P
z
−
m
z
:=
0 1 2 3 4 5 6 7 8 9 10
3
2
1
1
2
3
4
5
6
1.5
−
0.35
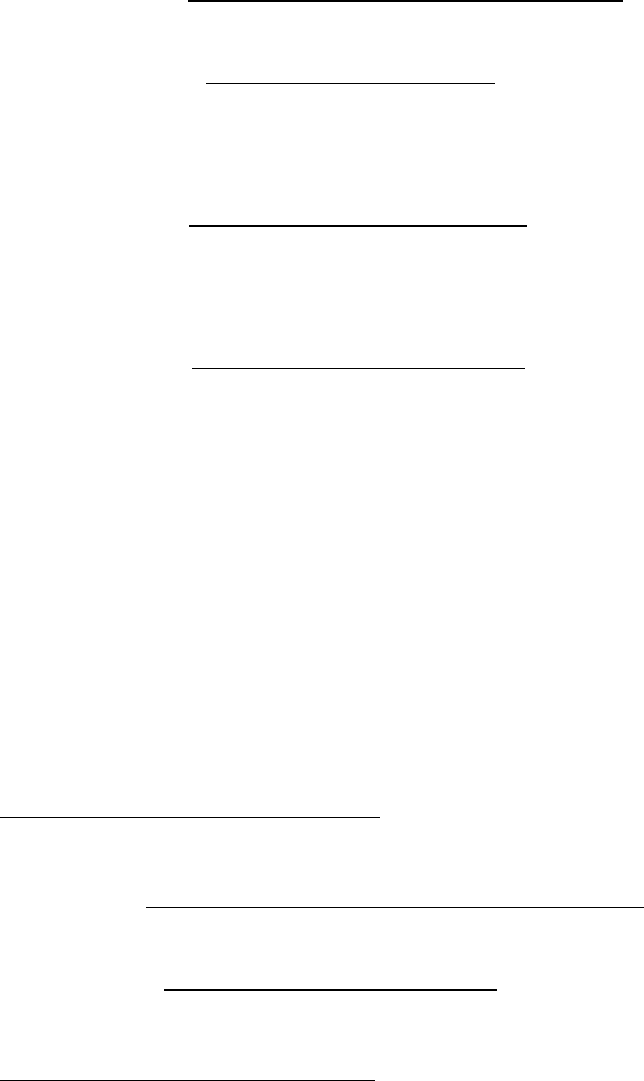
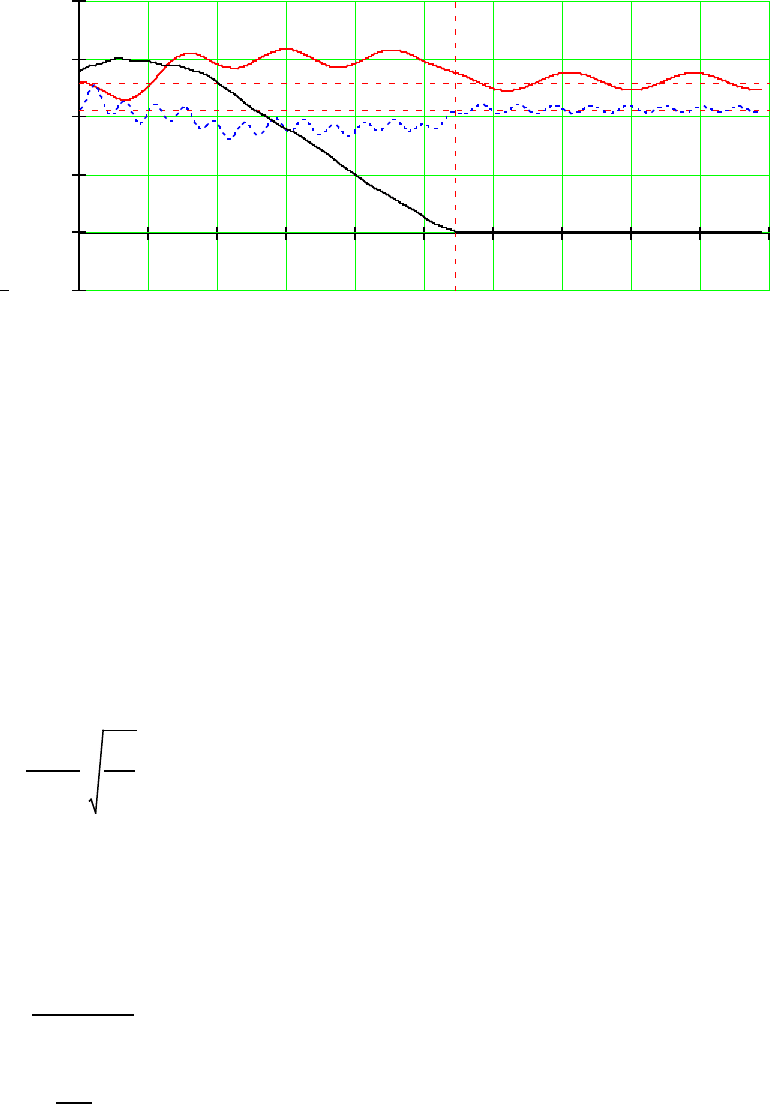
рис. 21 Переходный процесс в системе при приложении тормозного усилия за время, кратное
периоду колебаний и подъёме груза
N1
j
m
y
g
⋅
n
к
p
⋅
H
п
h
+
( )
⋅+
h
хв
q
⋅
n
хв
⋅+
p n
к
⋅
H
п
h
+
( )
y1
j
−
⋅+
q n
хв
⋅
h
хв
y1
j
+
( )
⋅
m
y
F3
j
⋅++
...:=
N2
j
m
z
g
⋅
h n
к
⋅
p
⋅+
q n
хв
⋅
H
п
h
хв
+
( )
⋅+
p n
к
⋅
h y1
+( )
j
⋅+
q n
хв
⋅
H
п
h
хв
+
( )
y1
j
−
⋅
m
z
F4
j
⋅−+
...:=
0 1 2 3 4 5 6 7 8 9 10
2
.
10
5
2
.
10
5
4
.
10
5
6
.
10
5
4.26 10
5
⋅
5.2 10
5
⋅
3.67
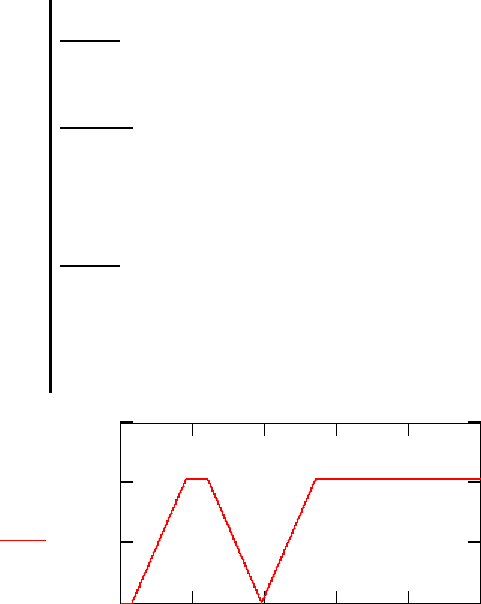
рис. 22 Натяжения в ветвях при приложении тормозного усилия за время, кратное периоду
колебаний и подъёме груза
Процессы при спуске груза
F
т
2 M
т орм
⋅
D
шк
:=
F
т
412377
=
Н
F
max
F
т
:=
F
max
412377
=
Н
F
т
t
( )
F
max
1.7
t 6
−( )⋅
t 7.7
<
if
F
max
−
t 6
−( )⋅
t 6
<
if
F
max
t 5
<
if
F
max
1.7
t 0.3
−( )⋅
t 2
<
if
0 t 0.3
<
if
F
max
otherwise
:=
0 2 4 6 8 10
2
.
10
5
4
.
10
5
6
.
10
5
рис. 23 Тормозная характеристика
D t x
,( )
x
2
if x
2
0
<
0
,
µ
y
−
x
2
x
4
−
( )
⋅
µ
z
x
2
x
6
−
( )
⋅−
c
y
x
1
x
3
−
( )
⋅−
m
x
c
z
−
x
1
x
5
−
( )
⋅
F
т
t
( )−
F
ст
+
m
x
+
...,
x
4
µ
y
−
x
4
x
2
−
( )
⋅
c
y
x
3
x
1
−
( )
⋅−
P
y
−
m
y
x
6
µ
z
−
x
6
x
2
−
( )
⋅
c
z
x
5
x
1
−
( )
⋅−
P
z
−
m
z
:=
Z rkfixed x 0
,
10
,
1000
,
D
,( ):=
j 1 990
..:=
t1
j
Z
j 1
,
:=
y4
j
Z
j 5
,
:=
y5
j
Z
j 6
,
:=
y6
j
Z
j 7
,
:=
y1
j
Z
j 2
,
:=
y2
j
Z
j 3
,
:=
y3
j
Z
j 4
,
:=
Вывод графика. Определение ускорений:
F2
j
if y2
j
0
<
0
,
µ
y
−
y2
j
y4
j
−
( )
⋅
µ
z
y2
j
y6
j
−
( )
⋅−
c
y
y1
j
y3
j
−
( )
⋅−
m
x
c
z
−
y1
j
y5
j
−
( )
⋅
F
т
t1
j
( )
−
F
ст
+
m
x
+
...,
:=
F3
j
µ
y
−
y4
j
y2
j
−
( )
⋅
c
y
y3
j
y1
j
−
( )
⋅−
P
y
−
m
y
:=
F4
j
µ
z
−
y6
j
y2
j
−
( )
⋅
c
z
y5
j
y1
j
−
( )
⋅−
P
z
−
m
z
:=
0 1 2 3 4 5 6 7 8 9 10
3
2
1
1
2
3
4
5
6
1.5
−
0.64
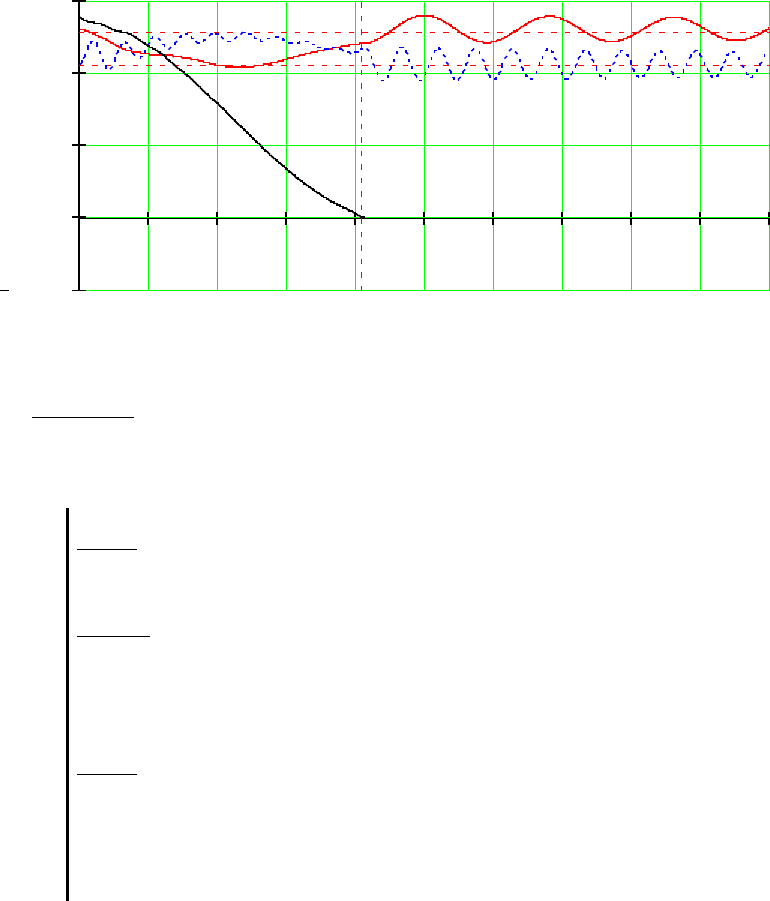
рис. 24 Переходный процесс в системе при приложении тормозного усилия за время, кратное
периоду колебаний и спуске груза
N1
j
m
y
g
⋅
n
к
p
⋅
H
п
h
+
( )
⋅+
h
хв
q
⋅
n
хв
⋅+
p n
к
⋅
H
п
h
+
( )
y1
j
+
⋅+
q n
хв
⋅
h
хв
y1
j
−
( )
⋅
m
y
F3
j
⋅−+
...:=
N2
j
m
z
g
⋅
h n
к
⋅
p
⋅+
q n
хв
⋅
H
п
h
хв
+
( )
⋅+
p n
к
⋅
h y1
−( )
j
⋅+
q n
хв
⋅
H
п
h
хв
+
( )
y1
j
+
⋅
m
z
F4
j
⋅++
...:=
0 1 2 3 4 5 6 7 8 9 10
2
.
10
5
2
.
10
5
4
.
10
5
6
.
10
5
8
.
10
5
4.26 10
5
⋅
5.2 10
5
⋅
5.47
рис. 25 Натяжения в ветвях при приложении тормозного усилия за время, кратное периоду
колебаний и спуске груза
3.12 Торможение системой автоматического
регулирования,обеспечивающей демпфирование колебаний сосудов
Система автоматического регулирования отслеживает заданное тормозное
усилие, гася при этом колебания .
Рассмотрим режим при подъёме груза.
Условное значение логарифмического декремента колебаний:
Условный, т.к. в реальной подъёмной установке отсутствуют
силы вязкого сопротивления, которые способны вызвать
быстрое затухание переходного процесса.
Коэффициент, учитывающий диссипативные свойства системы:
Коэффициент усиления, Нс/м :
δ
3.5
:=
µ
k
m
y
δ
⋅
π
c
y
m
y
⋅:=
k
k
1.5 µ
k
⋅:=
На задание тормозного усилия накладывается работа системы автоматического
регулирования.
0.3 сек - холостой ход тормоза.
Линейное тормозное усилие.
F
т
2 M
т орм
⋅
D
шк
:=
F
max
F
т
2
:=
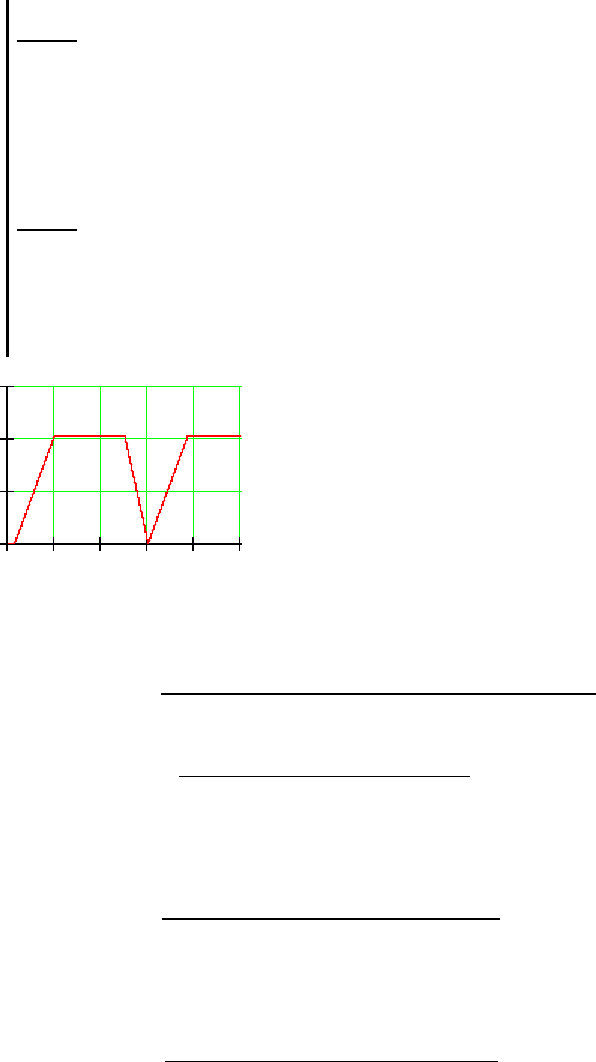
Задание тормозного усилия:
Систему автоматического
демпфирования после остановки
машины можно отключить.
F
т
t
( )
F
max
1.5
t 3.9
−( )⋅
t 5.4
<
if
F
max
−
1.5
t 3.9
−( )⋅
t 3.9
<
if
F
max
t 2.4
<
if
F
max
1.5
t 0.3
−( )⋅
t 1.8
<
if
0 t 0.3
<
if
F
max
otherwise
:=
0 2 4 6 8 10
0
1
.
10
5
2
.
10
5
3
.
10
5
F
т
t
( )
t
D t x
,( )
x
2
0 x
2
0
<
if
µ
y
−
x
2
x
4
−
( )
⋅
µ
z
x
2
x
6
−
( )
⋅−
c
y
x
1
x
3
−
( )
⋅−
m
x
c
z
−
x
1
x
5
−
( )
⋅
F
ст
−
F
т
t
( )−
0 x
2
0
<
if
k
k
x
2
x
4
−
( )
⋅
otherwise
−
m
x
+
...
otherwise
x
4
µ
y
−
x
4
x
2
−
( )
⋅
c
y
x
3
x
1
−
( )
⋅−
P
y
−
m
y
x
6
µ
y
−
x
6
x
2
−
( )
⋅
c
z
x
5
x
1
−
( )
⋅−
P
z
−
m
z
:=
Z rkfixed x 0
,
10
,
1000
,
D
,( ):=
j 1 1000
..:=
t1
j
Z
j 1
,
:=
y1
j
Z
j 2
,
:=
y2
j
Z
j 3
,
:=
y4
j
Z
j 5
,
:=
y5
j
Z
j 6
,
:=
y6
j
Z
j 7
,
:=
y3
j
Z
j 4
,
:=
F2
j
0 y2
j
0
<
if
µ
y
−
y2
j
y4
j
−
( )
⋅
µ
z
y2
j
y6
j
−
( )
⋅−
c
y
y1
j
y3
j
−
( )
⋅−
m
x
c
z
−
y1
j
y5
j
−
( )
⋅
F
ст
−
F
т
t1
j
( )
−
0 y2
j
0
<
if
k
k
y2
j
y4
j
−
( )
⋅
otherwise
−
m
x
+
...
otherwise
:=
F3
j
µ
y
−
y4
j
y2
j
−
( )
⋅
c
y
y3
j
y1
j
−
( )
⋅−
P
y
−
m
y
:=

F4
j
µ
z
−
y6
j
y2
j
−
( )
⋅
c
z
y5
j
y1
j
−
( )
⋅−
P
z
−
m
z
:=
И t j
,( )
F
т
t1
j
( )
0
−
y2
j
0
<
if
F
т
t1
j
( )
k
k
y2
j
y4
j
−
( )
⋅+
otherwise
:=
0 1 2 3 4 5 6 7 8 9 10
3
2
1
1
2
3
4
5
6
1.5
−
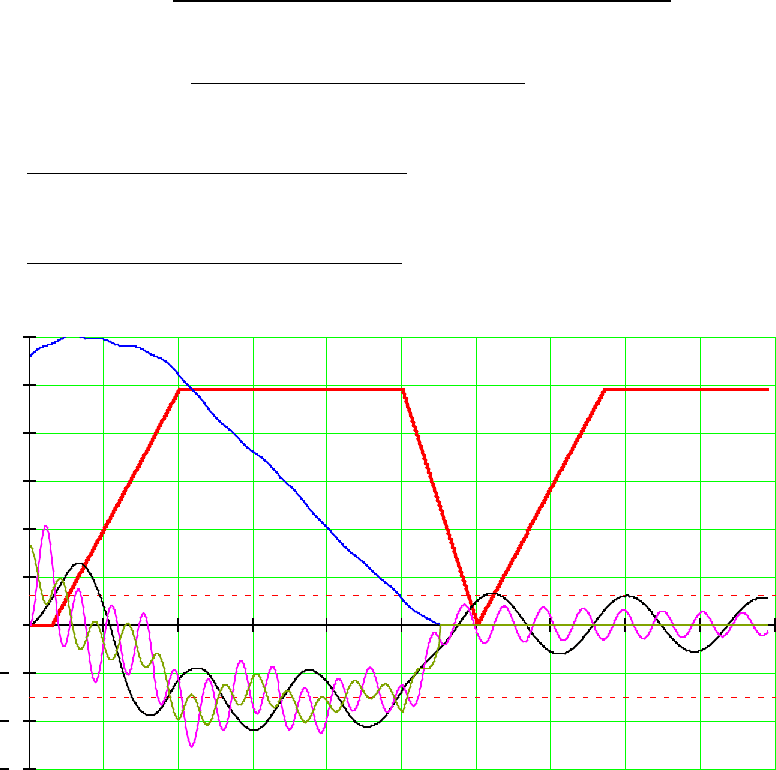
рис. 26 Переходный процесс в системе при торможении системой с автоматическим
демпфированием и подъёме груза
N1
j
m
y
g
⋅
n
к
p
⋅
H
п
h
+
( )
⋅+
h
хв
q
⋅
n
хв
⋅+
p n
к
⋅
H
п
h
+
( )
y1
j
−
⋅+
q n
хв
⋅
h
хв
y1
j
+
( )
⋅
m
y
F3
j
⋅++
...:=
N2
j
m
z
g
⋅
h n
к
⋅
p
⋅+
q n
хв
⋅
H
п
h
хв
+
( )
⋅+
p n
к
⋅
h y1
+( )
j
⋅+
q n
хв
⋅
H
п
h
хв
+
( )
y1
j
−
⋅
m
z
F4
j
⋅−+
...:=
0 1 2 3 4 5 6 7 8 9 10
2
.
10
5
2
.
10
5
4
.
10
5
6
.
10
5
4.26 10
5
⋅
5.2 10
5
⋅
4.1
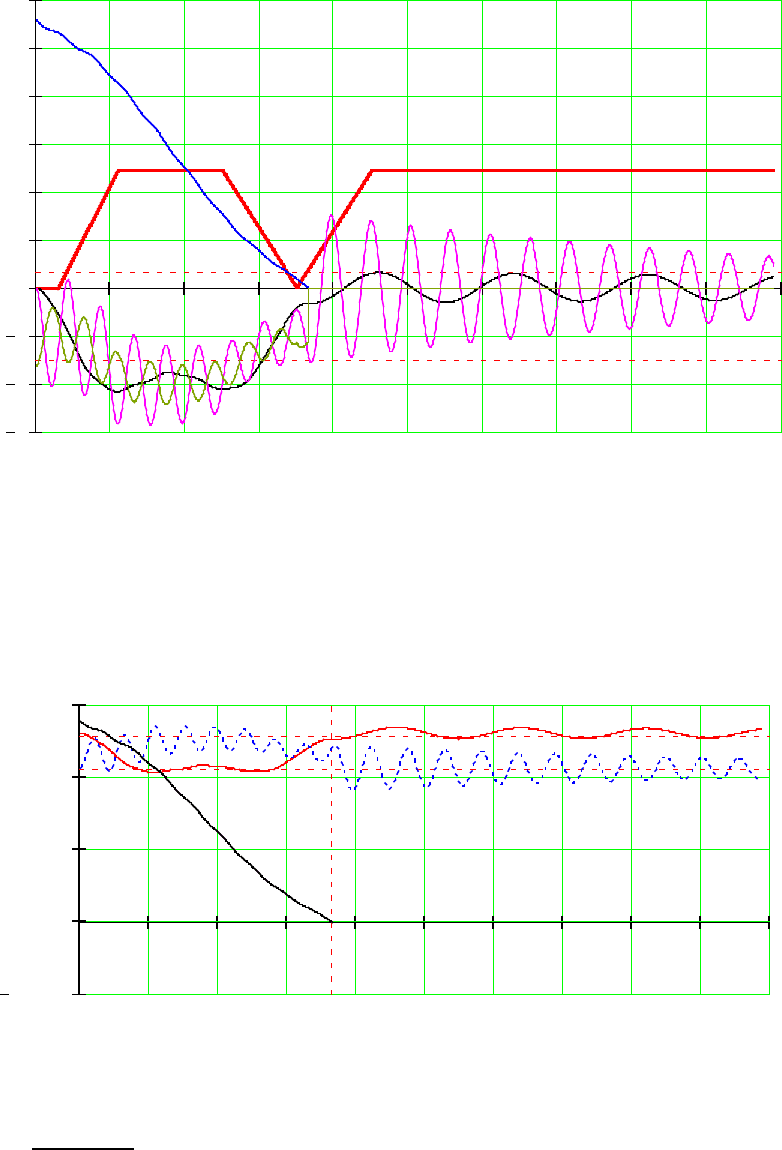
рис. 27 Напряжения в ветвях при торможении системой с автоматическим демпфированием и
подъёме груза
F
т
2 M
т орм
⋅
D
шк
:=
F
max
F
т
:=
F
т
t
( )
F
max
1.5
t 6.2
−( )⋅
t 7.7
<
if
F
max
−
1.5
t 6.2
−( )⋅
t 6.2
<
if
F
max
t 4.7
<
if
F
max
1.5
t 0.3
−( )⋅
t 1.8
<
if
0 t 0.3
<
if
F
max
otherwise
:=
при спуске груза

D t x
,( )
x
2
0 x
2
0
<
if
µ
y
−
x
2
x
4
−
( )
⋅
µ
z
x
2
x
6
−
( )
⋅−
c
y
x
1
x
3
−
( )
⋅−
m
x
c
z
−
x
1
x
5
−
( )
⋅
F
ст
+
F
т
t
( )−
0 x
2
0
<
if
k
k
x
2
x
4
−
( )
⋅
otherwise
−
m
x
+
...
otherwise
x
4
µ
y
−
x
4
x
2
−
( )
⋅
c
y
x
3
x
1
−
( )
⋅−
P
y
−
m
y
x
6
µ
y
−
x
6
x
2
−
( )
⋅
c
z
x
5
x
1
−
( )
⋅−
P
z
−
m
z
:=
Z rkfixed x 0
,
10
,
1000
,
D
,( ):=
j 1 1000
..:=
t1
j
Z
j 1
,
:=
y1
j
Z
j 2
,
:=
y2
j
Z
j 3
,
:=
y4
j
Z
j 5
,
:=
y5
j
Z
j 6
,
:=
y6
j
Z
j 7
,
:=
y3
j
Z
j 4
,
:=
F2
j
0 y2
j
0
<
if
µ
y
−
y2
j
y4
j
−
( )
⋅
µ
z
y2
j
y6
j
−
( )
⋅−
c
y
y1
j
y3
j
−
( )
⋅−
m
x
c
z
−
y1
j
y5
j
−
( )
⋅
F
ст
+
F
т
t1
j
( )
−
0 y2
j
0
<
if
k
k
y2
j
y4
j
−
( )
⋅
otherwise
−
m
x
+
...
otherwise
:=
F3
j
µ
y
−
y4
j
y2
j
−
( )
⋅
c
y
y3
j
y1
j
−
( )
⋅−
P
y
−
m
y
:=