Burton T. (et. al.) Wind energy Handbook
Подождите немного. Документ загружается.

The values of the parameters in Equation (5.6) governing the resonant tip
response are determined as follows.
(a) The aerodynamic damping is assumed to be zero, so the damping logarithmic
decrement is taken as 0.05, corresponding to the structural damping value for
fibreglass.
(b) The non-dimensional power spectral density of longitudinal wind turbulence,
R
u
(n) ¼ nS
u
(n
1
)=
2
u
, is calculated at the blade first mode natural frequency
according the Kaimal power spectrum defined in Eurocode 1 (Appendix, Equa-
tion A5.8) as 0.0339.
(c) A value of 9.2 is taken for the non-dimensional decay constant in the exponen-
tial expression for the normalized co-spectrum used in the derivation of the size
reduction factor, K
Sx
(n
1
), in Equation (A5.25).
The various stages in the derivation of the extreme root bending moment and the
dynamic factor, Q
D
, are set out below. The figures in square brackets are the
corresponding values obtained using the method of Annex B of DS 472, which are
included for comparison.
Size reduction factor for resonant response, K
Sx
(n
1
) 0.426 (Equation
(A5.25))
[0.312]
Ratio of standard deviation of resonant tip
displacement to the first mode component of
steady tip displacement,
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
02468101214161820
Blade radius (m)
Displacement
First mode - blade of
constant
cross section
(for comparison)
First mode - tapered
blade ‘TR’
Second mode - tapered
blade ‘TR’
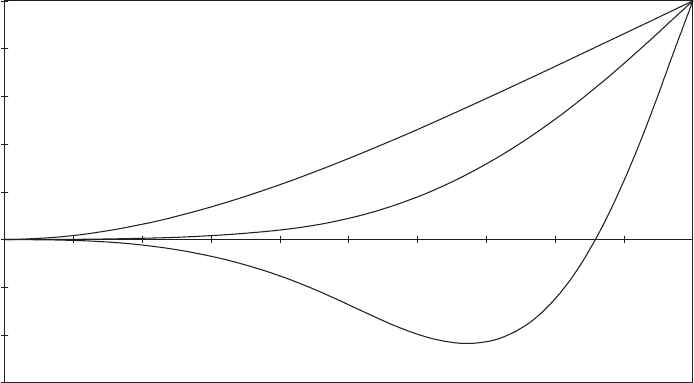
Figure 5.3 Blade ‘TR’ 1st and 2nd Mode Shapes
STATIONARY BLADE LOADING 225
y1
y
1
¼ 2
u
U
ffiffiffiffiffiffi
2
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
R
u
(n
1
)
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
K
Sx
(n
1
)
p
(Equation
(5.6))
[N/A]
¼ 2 3 0:1225 3 9:935 3
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
0:0339
p
3
ffiffiffiffiffiffiffiffiffiffiffi
0:426
p
¼ 2 3 0:1225 3 9:935 3 0:184 3 0:652
¼ 2 3 0:1225 3 1:192 0.292
Root moment fact or, º
M1
0.579 (Equation
(5.8))
[N/A]
Ratio of standard deviation of resonant root
moment to mean value,
M1
M
¼
x1
x
1
º
M1
0.169 (Equation
(5.7))
[0.338]
Size reduction factor for quasistatic or background
response, K
SMB
0.926 (Equation
(A5.40))
[0.78]
Ratio of standard deviation of quasistatic root
moment response to mean value,
MB
M
¼ 2
u
U
ffiffiffiffiffiffiffiffiffiffiffi
K
SMB
p
¼ 2 3 0:1225 3 0:962 0.236
(Equation
(5.9))
[0.216]
Ratio of standard deviation of total root moment
response to mean value,
M
M
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
MB
M
2
þ
M1
M
2
s
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
0:236
2
þ 0:169
2
p
0.290 [0.402]
Zero up-crossing frequency of quasistatic response,
n
0
0.41 Hz (Equation
(A5.57))
[N/A]
Zero up-crossing frequency of total root moment
response,
1.02 Hz (Equation
(A5.54))
[N/A]
Peak factor, g, based on 3.74 (Equation
(5.12))
[3.9]
Ratio of extreme moment to mean value,
M
max
M
¼ 1 þ g
M
M
¼ 1 þ 3:74(0:290) 2.087 (Equation
(5.13))
[2.57]
Peak factor, g
0
, based on n
0
3.49 [3.5]
Ratio of quasista tic component of extreme moment
to mean value
¼ 1 þ g
0
MB
M
¼ 1 þ 3:49(0:236) 1.823
(Equation
(5.15))
[1.76]
Dynamic factor, Q
D
¼ 2:087=1:823 1.145 (Equation
(5.17))
[1.46]
It is apparent that the DS 472 method yields a significantly larger value of the
extreme root bending moment. However, the DS 472 ratio of extreme to mean
bending moment is intended to apply at all points along the blade, so a conservative
value at the root is inescapable, as is shown in the next section which examines the
variation of bending moment along the blade.
226 DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES
Spanwise variation of bending moment
The resonant and quasistatic components of bending moments at intermediate
positions along the blade can be related to those at the root in a straightforward way.
As far as the quasistatic bending moment fluctuations are concerned, the varia-
tion along the blade follows closely the bending moment variation due to the steady
loading, although slight changes in the size reduction factor have a small effect. The
bending moment diagram for the resonant oscillations is, however, of a very
different shape, because of the dominance of the inertia loading on the tip. An
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Radius (r/R )
Moment at radius r as a proportion of root bending moment
Resonant bending moment
Quasistatic bending moment
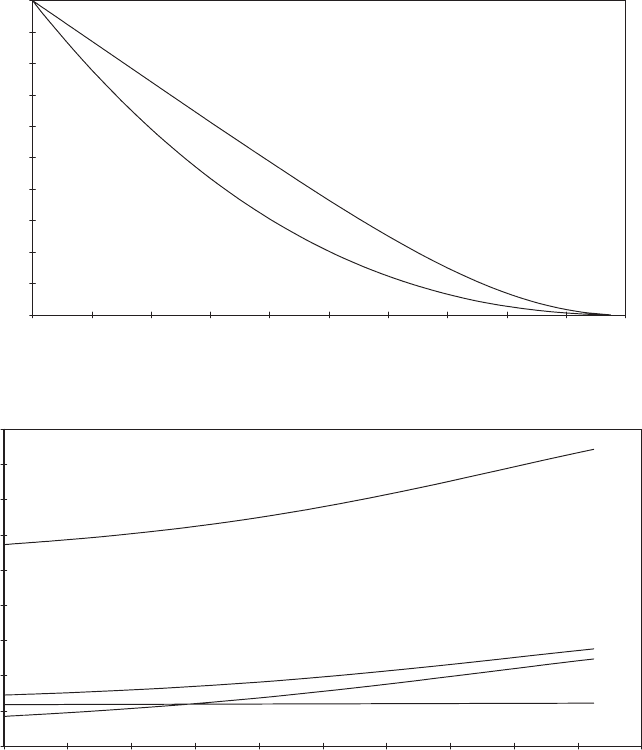
Figure 5.4 Spanwise Variation of Resonant and Quasistatic Bending Moments – Blade ‘TR’
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Radius (r/R )
Quasistatic bending moment standard deviation/
steady bending moment
Resonant bending moment standard deviation/
steady bending moment
Combined bending moment standard deviation/
steady bending moment
Dynamic magnification factor
Figure 5.5 Spanwise Variation of (a) Fluctuating Bending Moment Standard Deviations in
Terms of Local Steady Bending Moment, and (b) Dynamic Magnification Factor – for Blade
‘TR’
STATIONARY BLADE LOADING 227
expression for the resonant bending moment variation along the blade is given in
Section A5.8 of the Appendix, and it is plotted out for the example above in Figure
5.4, with the quasistatic bending moment variation alongside for comparison. It is
seen that the resonant bending moment diagram is closer to linear than the
quasistatic one, which approximates to a parabola.
A consequence of the much slower decay of the resonant bending moment out
towards the tip is an increase in the ratio of the resonant bending moment standard
deviation to the local steady moment with radius. This results in an increase in the
dynamic magnification factor, Q
D
, from 1.145 at the root to 1.69 at the tip for the
example above (see Figure 5.5).
5.7 Blade Loads During Operation
5.7.1 Deterministic and stochastic load components
It is normal to separate out the loads due to the stea dy wind on the rotating blade
from those due to wind speed fluctuations and analyse them in different ways. The
periodic loading on the blade due to the steady spatial variation of wind speed over
the rotor swept area is termed the deterministic load component, because it is
uniquely determined by a limited number of parameters – i.e., the hub-height wind
speed, the rotational speed, the wind shear, etc. On the other hand, the random
loading on the blade due to wind speed fluctuations (i.e., turbulence) has to be
described probabilistically, and is therefore termed the stochastic load component.
In addition to wind loading, the rotating blade is also acted on by gravity and
inertial loadings. The gravity loading depends simply on blade azimuth and mass
distribution, and is thus det erministic, but the inertial loadings may be affected by
turbulence – as, for example, in the case of a teetering rotor – and so will sometimes
contain stochastic as well as deterministic components.
5.7.2 Deterministic Aerodynamic Loads
Steady, uniform flow perpendicular to plane of rotor
The application of momentum theory to a blade element, which is described in
Section 3.5.3, enables the aerodynam ic forces on the blade to be calcu lated at
different radii. Equations (3.51) or (3.51a) and (3.52) are solved iteratively for the
flow induction factors, a and a9, at each radiu s, enabling the flow angle, , the angle
of attack, Æ, and hence the lift and drag coefficients to be determined. The solution
of the equations is normally simplified by omitting the C
2
y
term in Equation (3.51) –
an approximation which is justifed, because
r
C
2
y
=C
x
is negligibly small away from
the root area.
For loadings on the outboar d portion of the blade, allowance for tip loss must be
made, so Equations (3.51) and (3.52) are replaced by Equations (3.51b) and (3.52a) in
Section 3.8.5, (with the omission of the C
2
y
term in Equation (3.51b) again being
228 DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES
permissible). These equations can be arranged to give the following expressions for
the forces per unit length on an element perpendicular to the plane of rotation and
in the direction of blade motion, known as the out-of-plane and in-plane forces
respectively:
Out-of-plane force per unit length: F
X
¼ C
x
1
2
rW
2
c ¼ 4rU
2
1
(1 af )a
f
N
r (5:18)
In-plane force per unit length: F
Y
¼ C
y
1
2
rW
2
c ¼ 4rU
1
(1 af )a9
f
N
r
2
(5:19)
The parameters in the expressions are as defined in Chapter 3 ( f is the tip loss
factor, and N is the number of blades), while the x and y directions are as defined in
Figure C1.
The variation of the in-plane and out-of-plane forces with radius is shown in
Figure 5.6 for a typical machine operating in a steady 10 m=s wind speed. The 40 m
stall-regulated turbine considered in this example is fitted with three ‘TR’ blades as
described in Example 5.1 and rotates at 30 r.p.m. The blade twist distribution is
linear, and selected to produce the maximum energy yield for an annual mean
wind speed of 7 m=s. It is evident that the out-o f-plane load per unit length
increases approximately linearly with radius, in spite of the reducing blade chord
until the effects of tip loss are felt beyond about 75 percent of tip radius. Note that
the form of the variation would be the same for any combi nation of rotational
speed, wind speed and tip radius yielding the same tip speed ratio, because it is the
tip speed ratio that determines the radial distribution of flow angle , and of the
induction factors a and a9.
Integration of these forces along the blade then yields in-plane and out-of-plane
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 2 4 6 8 101214161820
Radius (m)
Load per metre (KN)
Out-of-plane force
per unit length
In-plane force
per unit length
Rotational speed = 30 rpm
Figure 5.6 Distribution of Blade In-plane and Out-of-plane Aerodynamic Loads during
Operation of Typical 40 m Diameter Stall-regulated Machine in a Steady, Uniform 10 m=s
Wind
BLADE LOADS DURING OPERATION 229
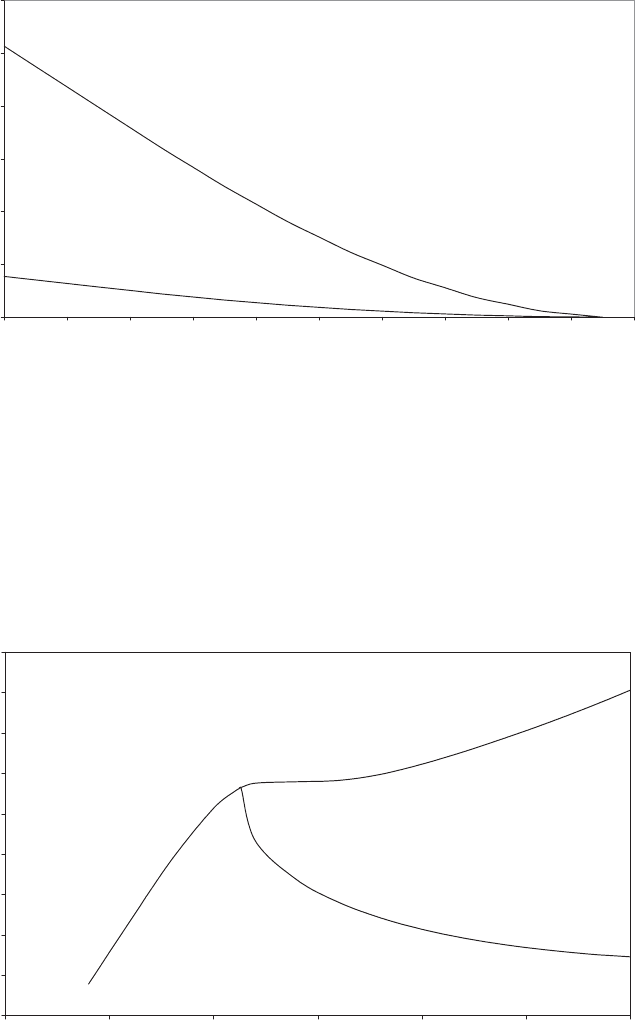
aerodynamic blade bending moments. The variation of these moments with radius
is shown in Figure 5.7 for the example above. The blade bending mo ments
effectively decrease linearly with increasing radius over the inboard third of the
blade because of the concentration of loading outboard.
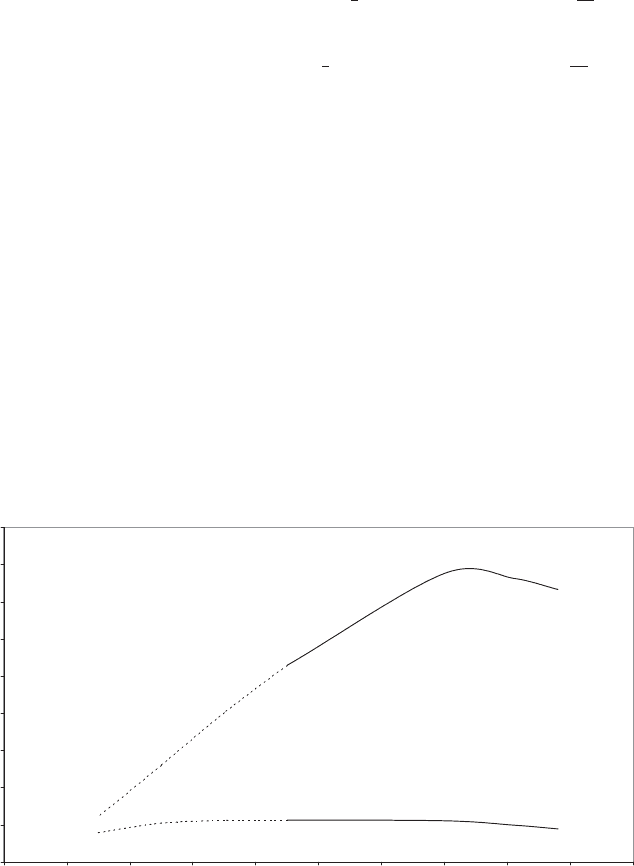
The variation of the blade root out-of-plane bending moment with wind speed is
illustrated in Figure 5.8 for the 40 m diameter example machine described above.
0
50
100
150
200
250
300
0 2 4 6 8 101214161820
Radius (m)
Bending Moment (KNm)
Out-of-plane moment
In-plane moment
Rotational speed = 30 rpm
Figure 5.7 Blade In-plane and Out-of-plane Aerodynamic Bending Moment Distributions for
Typical 40 m Diameter Stall-regulated Machine Operating in a Steady, Uniform 10 m =s Wind
0
50
100
150
200
250
300
350
400
450
0 5 10 15 20 25 30
Wind speed (m/s)
Out-of-plane aerodynamic root bending moment (kNm)
500 kW Stall-regulated machine
Pitch-regulated machine
with 400 kW power limit
40 m diameter, 3 bladed rotor
with TR blades
rotational speed = 30 rpm
Figure 5.8 Blade Out-of-plane Root Bending Moment During Operation in Steady, Uniform
Wind – Variation with Wind Speed for Similar Stall-regulated and Pitch-regulated Machines
230
DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES
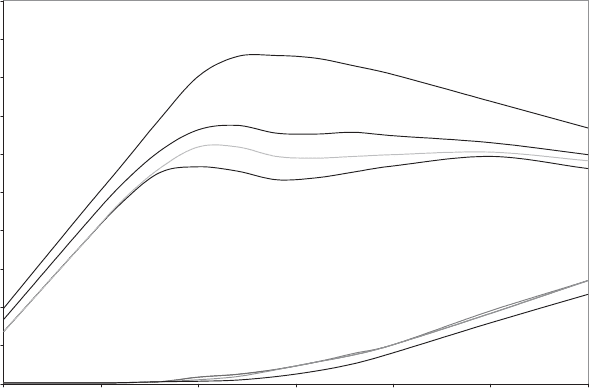
As explained in Section 3.12, the phenomenon of stall delay results in significantly
increased values of the lift coefficient at higher wind speeds on the inboard section
of the rotating blade than predicted by static aerofoil data, such as that reproduced
in Figure 3.41. Accordingly, Figu re 5.8 and the other figures referred to in this
section have been derived using realistic aerofoil data for a rotating LM-19.0 blade
reported in Petersen et al. (1998), which is based on an empirical modification of
static or two-dimensional aerofoil data. The modified data are reproduced in Figure
5.9, and display much higher lift coefficients for the thicker, inboard blade sections
at high angles of attack than for the thinner, outboard blade sections because of stall
delay at the inboard sections.
Figure 5.8 shows the blade root out-of-plane bending moment increasing nearly
linearly with wind speed at first and then levelling off, becoming almost constant
for winds between 12 m=s and 16 m =s, as the blade goes into stall. Thereafter the
root moment increases again, but much more gently than before.
Also shown on Figure 5.8 is the variation of blade root out-of-plane bending
moment with wind speed for the same machine with pitch regulation to limit the
power output to 400 kW. It is evident that the bending moment drops away rapidly
at wind speed s above rated.
Yawed flow
The appli cation of blade element–momentum theory to steady yawed flow is
decribed in Section 3.10.8. This methodology has been used to derive Figure 5.10,
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 5 10 15 20 25 30
Angle of attack
Lift and Drag Coefficients
Lift
Drag
t/c = 24%
t/c = 18%
t/c = 15%
t/c = 13%
t/c = 24%
t/c = 13%,
15%
and 18%
Figure 5.9 Aerofoil Data for LM-19.0 Blade for Various Thickness/Chord Ratios (from
Petersen et al. (1998))
BLADE LOADS DURING OPERATION 231
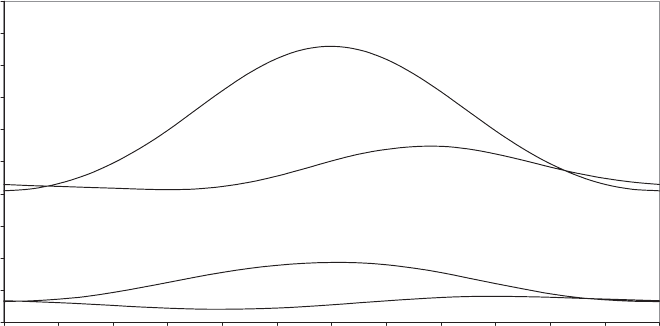
which shows the variation of the blade root out-of-plane and in-plane moments
with azimuth for the 40 m diameter stall-regulated machine described above,
operating at a steady yaw angle of þ308. Note that the blade azimuth is measured
in the direction of blade rotation, from a zero value at top dead centre, and the yaw
angle is defined as positive when the lateral component of air flow with respect to
the rotor disc is in the same direction as the blade movement at zero azimuth.
Figure 5.10 reveals a distinct difference between the behaviour at 10 m=s and
20 m=s. In the latter case, the bending moment variation is sinusoidal with a
maximum value at 1808 azimuth, indicating that the variation is dominated by the
effect of the fluctuation of the air velocity relative the blade, W.At10m=s, however,
the maximum out-of-plane bending mome nt oc curs at about 2408 azimuth, suggest-
ing that the non-uniform component of induce d velocity, u
1
(Equation (3.107)) is
also significant. As wind speed increases, of course, the induction factor, a, becomes
small, reducing the impact of u
1
.
Shaft tilt
Upwind machines, i.e., wind turbines with the rotor positioned between the tower
and the oncoming wind, normally have the rotor shaft tilted upwards by several
degrees in order to increase the clearance between the rotor and the tower. Thus, as
for the case of ya w misalignment, the flow is inclined to the rotor shaft axis, but
tilted upwards rather than sideways, so the treatment of shaft tilt mirrors that of
yawed flow.
0
50
100
150
200
250
300
350
400
450
500
0 30 60 90 120 150 180 210 240 270 300 330 360
Azimuth (degrees)
Aerodynamic Root Bending Moment (kNm)
Out-of-plane BM
In-plane BM
20 m/s wind speed
10 m/s wind speed
20 m/s wind speed
10 m/s wind speed
Figure 5.10 Variation of Blade Root Bending Moments with Azimuth, for Typical 40 m
Diameter Stall-regulated Machine Operating at a Steady 308 Yaw
232
DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES
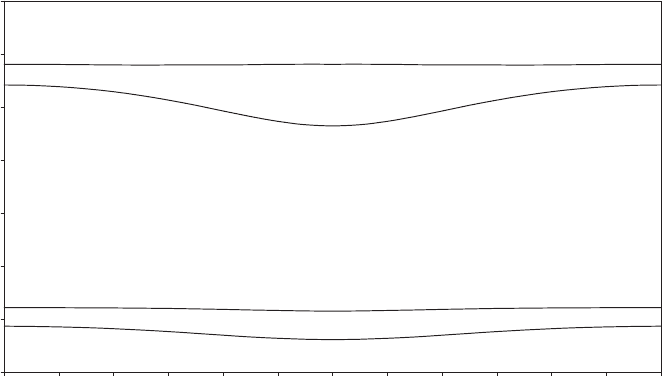
Wind shear
The increase of wind speed with height is known as wind shear. The theoretical
logarithmic profile, U(z) / ln(z=z
0
), is usually approximated by the power law,
U(z) / (z=z
ref
)
Æ
for wind turbine design purposes. The appropriate value of the
exponent Æ increases with the surface roughness, z
0
, with a figure of 0.14 typically
quoted for level countryside, although the speed up of airflow close to the ground
over rounded hills usually results in a lower value at hill tops. As already noted,
IEC 61400-1 specifies a conservative value of 0.20.
In applying momentum theory to this case, the velocity component at right angles
to the plane of rotation is expressed as U
1
(1 þ r cos ł=z
hub
)
Æ
(1 a). The variation of
blade root bending moments with azimuth due to wind shear is illustrated in
Figure 5.11 for the example 40 m diameter stall-regulated machine, taking the
exponent as 0.20, the hub height as 40 m and considering hub-height wind speeds
of 10 m=s and 15 m=s. In the former case, the variation is nearly sinusoidal, but in
the latter case the root bending moments are effectively constant, as the blade is in
stall.
Tower shadow
Blocking of the air flow by the tower resu lts in regions of reduced wind speed both
upwind and downwi nd of the tower. This reduction is more severe for tubular
0
50
100
150
200
250
300
350
0 30 60 90 120 150 180 210 240 270 300 330 360
Azimuth (degrees)
Aerodynamic root bending moment (kNm)
Out-of-plane moment for U = 15 m/s
Out-of-plane moment for U = 10 m/s
In-plane moment for U = 15 m/s
In-plane moment for U = 10 m/s
Rotational speed = 30 r.p.m.
Shear exponent = 0.2
Hub height = 40 m
Figure 5.11 Variation of Blade Root Bending Moments with Azimuth due to Wind Shear,
for Typical 40 m Diameter Stall-regulated Machine Operating in Steady Hub-height Winds of
10 m=s and 15 m=s (shear exponent ¼ 0:2)
BLADE LOADS DURING OPERATION 233

towers than for lattice towers and, in the case of tubular towers, is larger on the
downwind side because of flow separation. As a consequence, designers of down-
wind machines usually position the rotor plane well clear of the tower to minimize
the interference effect.
The velocity deficits upwind of a tubular tower can be modelled using potential
flow theory. The flow around a cylindrical tower is derived by superposing a
doublet, i.e., a source and sink at very close spacing , on a uniform flow, U
1
, giving
the stream function:
ł ¼ U
1
y 1
(D=2)
2
x
2
þ y
2
!
(5:20)
where D is the tower diameter, and x and y are the longit udinal and lateral co-
ordinates with respect to the tower centre (see Figure 5.12). Differentiation of ł with
respect to y yields the following expression for the flow velocity in the x direction:
U ¼ U
1
1
(D=2)
2
(x
2
y
2
)
(x
2
þ y
2
)
2
!
(5:21)
The second term with in the brackets, which is the velocity deficit as a proportion of
the undisturbed wind speed, is plotted out against the lateral co-ordinate, y,
divided by tower diameter, for a range of upwind distances, x , in Figure 5.13. The
velocity deficit on the flow axis of symmetr y is equal to U
1
(D=2x)
2
and the total
width of the deficit region is twice the upwind distance. Consequently the velocity
gradient encountered by a rotating blade decreases rapidly as the upwind distance,
x, increases.
The effect of tower shadow on blade loading can be estimated by setting the local
velocity component at right angles to the plane of rotation equal to U(1 a) in place
of U
1
(1 a), and applying blade element theory as usual. Results for blade root
bending moments for the example 40 m diameter stall-regulated mach ine are given
in Figure 5.14, assuming a tower diameter of 2 m and ignoring dynamic effects. The
plots show the variati on of in-plane and out-of-plane root moments with azimuth
during operation in wind speeds of 10 m=s and 15 m=s, for a blade-tower clearance
equal to the tower radius i.e., for x=D ¼ 1. Note that the dip in out-of-plane bending
moment is more severe at the lower wind speed. Also shown are 10 m=s plots for
x=D ¼ 1:5, which exhibit a much less severe disturbance.
In the case of downwind turbines, the flow separation and generation of eddies
which take place are less amenable to analysis, so empirical methods are used to
estimate the mean velocity deficit. Commonly the profile of the velocity deficit is
assumed to be of cosine form, so that
U ¼ U
1
1 k cos
2
y
(5:22)
234 DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES