Бойко B.C. Розробка та експлуатація нафтових родовищ
Подождите немного. Документ загружается.

або за Рщт = £р
ст
/
ш
£; £
пр
=
2,06
•
10
і
°
Н/м
2
;
р
с
= 7800 кг/м
3
/
ш
= 2,076
\0~
l0
L
2
n
2
S.
(9.46)
Таким чином,
дійсна довжина ходу плунжера
з урахуванням також
інерційних навантажень
S
un
=
S-X
+
l
lH
=
S-\ +2,076Л0~
10
1?n
2
S
=
SK
X
-X, (9.47)
де К
х
-
фактор
виграшу ходу,
К
х
=1 + 2,076 10~
10
І?п
2
. (9.48)
Для звичайних режимів роботи устатковання фактор виграшу ходу
К
х
на
1,5-2,5%
перевищує одиницю.
Аналіз показав, що формула (9.45) справджується за статичного
режиму. За динамічного режиму необхідно користуватися формулою
(9.48).
Для розрахунку К
х
існують також інші формули.
Сили тертя також впливають на деформацію штанг та труб і
змінюють довжину ходу плунжера, але їх впливом звичайно нехтують.
У разі руху штанг вниз на плунжер діє
зосереджена
осьова стискна
сила
РСТЙС,
зумовлена тертям плунжера під час руху вниз (Р
тт
) і
перепадом тиску в нагнітальному клапані (Р
т
„):
-*
сгис
~~
-*т
пл
"•"
"кл
н-
(У.4У)
Ця сила напрямлена вверх, зумовлює стискання і повздовжній згин
нижньої частини колони штанг, а також розтяг труб. Це може
спричинити потребу застосування нижніх штанг більшого діаметра
(обважнений
низ).
Вагу обважненого низу беруть такою, що дорівнює
СИЛІРстас.
491
Розрахунок колони насосних штанг
Колона насосних штанг має бути достатньо міцною і надійною в
роботі за мінімально можливої ваги, малої вартості та незначних втрат
ходу плунжера внаслідок пружних деформацій.
Під час роботи ШСНУ у верхній частині колони штанг діють змінні
зусилля, які зумовлюють змінні напруження, що змінюються за
асиметричним циклом, а в нижній частині - знакозмінні напруження.
Цикл зміни напружень можна охарактеризувати максимальним,
мінімальним і середнім напруженнями, амплітудою зміни напружень і
коефіцієнтом асиметрії циклу навантаження:
а
тах
=
Мпах'/ш' °тіп
=
^тіп' /ш> °с
=
\°тах~'~
0
тіп/' 4 (bOUJ
ст
а =
(
ст
тах
~
ст
тіп V
2
; 'а =
а
тіп /
а
тах
•
(
9
-
51
)
З опору матеріалів знаємо, що характеристикою міцності металу за
змінних напружень є межа втоми або межа витривалості. Межею
міцності від втоми для чорних металів є найбільше напруження, яке
витримує зразок за
10
млн.
циклів симетричного навантаження. Під час
роботи ШСНУ з числом ходів и=15хв така кількість циклів
досягається за 460
діб,
причому цикл асиметричний. У даному випадку
роботу штанг, окрім максимального напруження, необхідно
характеризувати також амплітудою його зміни, що практично дуже
трудно. Для зв'язку граничних напружень асиметричних циклів із
межею втоми за симетричного циклу вводиться умовна величина, яку
називають зведеним
напруженням
о"
зв
. Дня розрахунку ст
зв
із великої
кількості залежностей, що відомі в загальному машинобудуванні,
стосовно штангових колон використовують формули І.А. Одінга,
М.П. Марковая
і
Б.Б.
Крумана:
ст
зв = V
CT
max
CT
a
; (9-52)
o
3B
=o
a
+0,2a
max
; (9.53)
492
О
зв=°
тах
-0,56а
тіп
. (9-54)
Можливість використання формули (9.52) показав
А.С.
Вірновський, (9.53) - В.П. Грабовим, а формулу (9.54) дістав
Б.Б. Круман на основі модифікованої діаграми Гудмена. Конструкції
колон, які розраховано за даними формулами, різняться неістотно (не
більш як на 5-10%), тому можна користуватися простішими
формулами (9.53) або (9.54).
Для забезпечення втомової міцності зведені напруження
зіставляють із гранично допустимими зведеними напруженнями [а
зв
]
для вибраного матеріалу штанг
за
заданих умов експлуатації:
ст
зв
<[а
зв
].
(9.55)
Гранично допустимі зведені напруження [с
зв
] знаходять
статистичним обробленням фактичних даних про обрив штанг в
умовах даного нафтопромислового району, тобто з урахуванням
впливу на колону штанг навколишнього середовища (корозійна втома
металу). Для цього будують графік залежності середньої частоти
обривів штанг від напруження у верхньому перерізі колони. Як
гранично допустиме зведене напруження [а
зв
] беруть напруження, за
якого кількість обривів не перевищує 1-3 за рік.
У літературі існують таблиці значин гранично допустимого
зведеного напруження [а
зв
] залежно від марки сталі, виду
термооброблення, діаметра насоса та корозійності продукції. Звичайно,
[о-
3
в]
= 70...130МПа.
Для зменшення ваги колони штанг її роблять дво- (із штанг двох
різних діаметрів) або (за більших глибин) триступінчастою з умови
рівноміцності ступенів. Ця умова полягає в тому, що зведені
напруження у найнавантаженіших (верхніх) перерізах кожного із
ступенів рівні між собою:
Озв(1) = 0
3
в(2)=СТзв(3)-
(
9
-
56
)
493
Практично для конструювання штангових колон використовують
таблиці (АзНДІ та ін.), а іноді - номограми (А.Н. Грузінов) чи ана-
літичні методики. За таблицями залежно від параметрів режиму
(S,
п) і
діаметра насоса d
H
для вибраної марки сталі та заданої значини [о~
зв
]
вибирають конструкцію колони (одно-, дао- чи триступінчасту),
діаметри штанг
і
довжину ступенів.
Врівноваження
верстатів-гойдалок
Нерівномірне навантаження, яке діє на головку балансира,
спричинює нерівномірну роботу електродвигуна. У найпростішій
постановці за статичного режиму, коли динамічними навантаженнями
і силами тертя можна знехтувати, ця робота додатна в разі руху штанг
вверх (напрям діючого навантаження протилежний напряму руху
штанг)
А
В
=
(Р'
Ш
+
Р
Р
)Б (9.57)
і від'ємна в разі руху вниз (навантаження діє в напрямі руху штанг)
A^-P'mS,
(9.58)
тобто під час руху штанг вниз двигун приводиться в рух силою
тяжіння колони штанг.
Така нерівномірність зумовлює прискорене спрацювання вузлів
верстата-гойдалки, ненормальний режим роботи електродвигуна.
Оптимальний режим його роботи буде забезпечено, якщо робота, яка
виконується двигуном протягом одного подвійного ходу (у випадках
руху штанг вверх
і
вниз) є стабільною. Стабільність роботи досягається
врівноваженням верстата-гойдалки вантажами
(див.
§ 9.1).
Величину і місцеположення вантажу можна встановити з умови
рівності робіт у випадках руху штанг вверх
і
вниз.
494
На практиці для врівноваження верстата-гойдалки використовують
номограми, які наводяться в паспортній характеристиці верстата-
гойдалки. Остаточно врівноважження та його контроль виконують
шляхом контролювання струму, який споживає електродвигун. Сила
струму має бути однаковою у випадках ходу вверх і вниз. Перевірку
виконують за допомогою переносного амперметра, який називають
амперкліщами, що працюють за принципом трансформатора. Для
розрахунку відстаней переміщення вантажу на балансирі і роторі
використовують емпіричну формулу
А.І.
Рабіновича.
§ 9.4 Особливості дослідження насосних свердловин і
динамометрування штангових насосних устатковань
Роботу свердловини, обладнаної ШСНУ, контролюють шляхом її
дослідження
і
динамометрування устатковання.
Динамометрування устатковань
Діаграму навантажень на гирловий шток залежно від його ходу
називають
динамограмою,
а її зняття -
динамометруванням
ШСНУ.
Його виконують за допомогою динамографа. Залежно від принципу
роботи розрізняють механічні, гідравлічні, електричні, тензометричні
та інші динамографи.
У найпоширенішому гідравлічному динамографі конструкції
Г.М. Мінінзона типу ГДМ-3 навантаження, що діє на шток,
передається через важельну систему на мембрану камери, яка
заповнена рідиною (спиртом або водою), де виникає підвищений тиск.
Тиск рідини в камері, що пропорційний навантаженню на шток,
передається по капілярній трубці на геліксну пружину. Під час
збільшення тиску геліксна пружина розкручується, а перо, яке
прикріплене до її вільного кінця, рисує лінію на паперовому
діаірамному бланку.
495
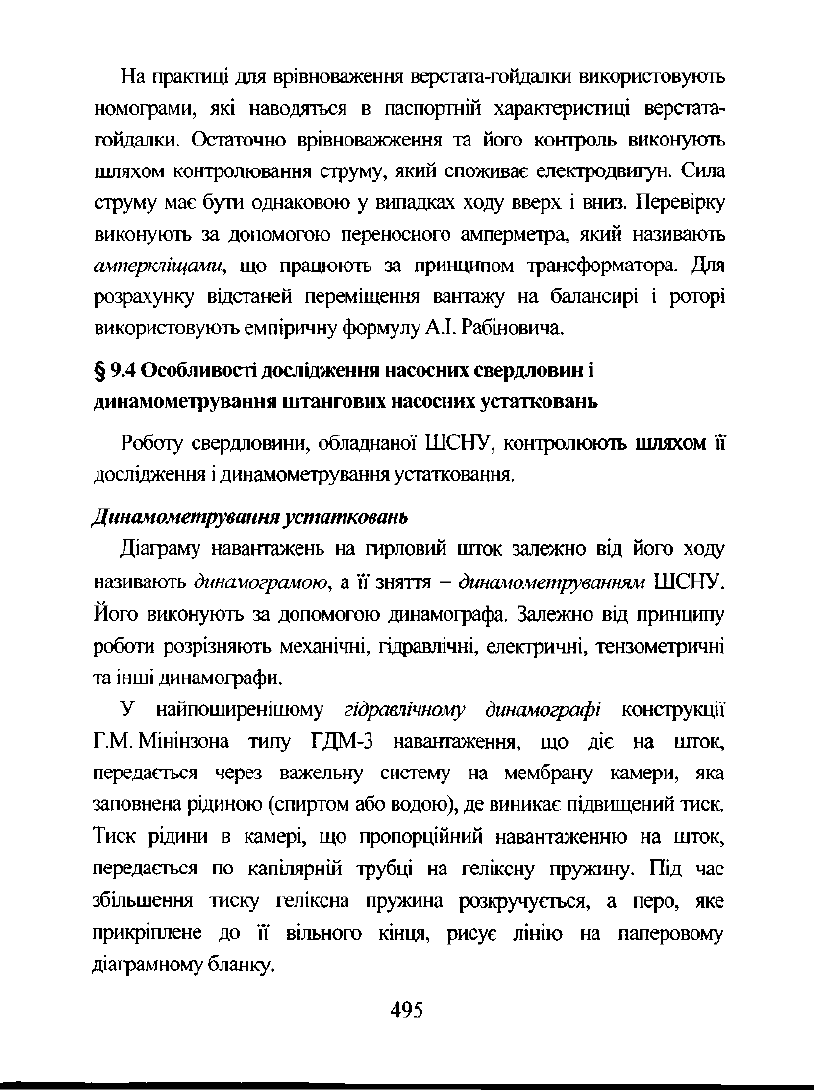
Бланк закріплений на рухомому столику, який за допомогою
приводного механізму перемішується пропорційно ходу гирлового
штока. У результаті дістають розгортку навантаження Р залежно від
довжини ходу S. Для знімання динамограми вимірну частину
динамографа встановлюють між траверсами канатної підвіски штанг, а
нитку приводного механізму самописця прикріпляють до нерухомої
точки (гирлового сальника). Масштаб ходу змінюють зміною діаметра
шківа самописця
(1:15,
1:30,
1:45),
а зусилля - перестановкою опори
месдози і важеля (40, 80
і
100 кН).
Рисунок 9.4 - Динамограми роботи штангового насоса з урахуванням статичних
навантажень і сил тертя
(а),
навантажень інерційних (б) і динамічних
(в);
в.м.т. і н.м.т. - мертва
точка
відповідно верхня та нижня (стрілками
показано хід запису динамограми)
496
За допомогою динамограми можна знайти максимальне та міні-
мальне навантаження, довжину ходу штока і плунжера, зрозуміти
динамічні процеси в колоні штанг, виявити ряд дефектів і неполадок у
роботі ШСНУ
і
насоса.
На рис. 9.4, а показано найпростішу динамограму нормальної
роботи насоса, яка має форму правильного паралелограма (позначення
наводяться в
§
9.3). Сили тертя напрямлені проти руху, тому
в
разі руху
вверх вони збільшують навантаження, а в разі руху вниз - зменшують.
Інерційні навантаження зумовлюють "інерційний поворот" динамо-
грами відносно нормального її положення (рис. 9.4, б). Хвилястий ха-
рактер ліній
зумовлений коливальними процесами
в
штангах
(рис.
9.4,
в).
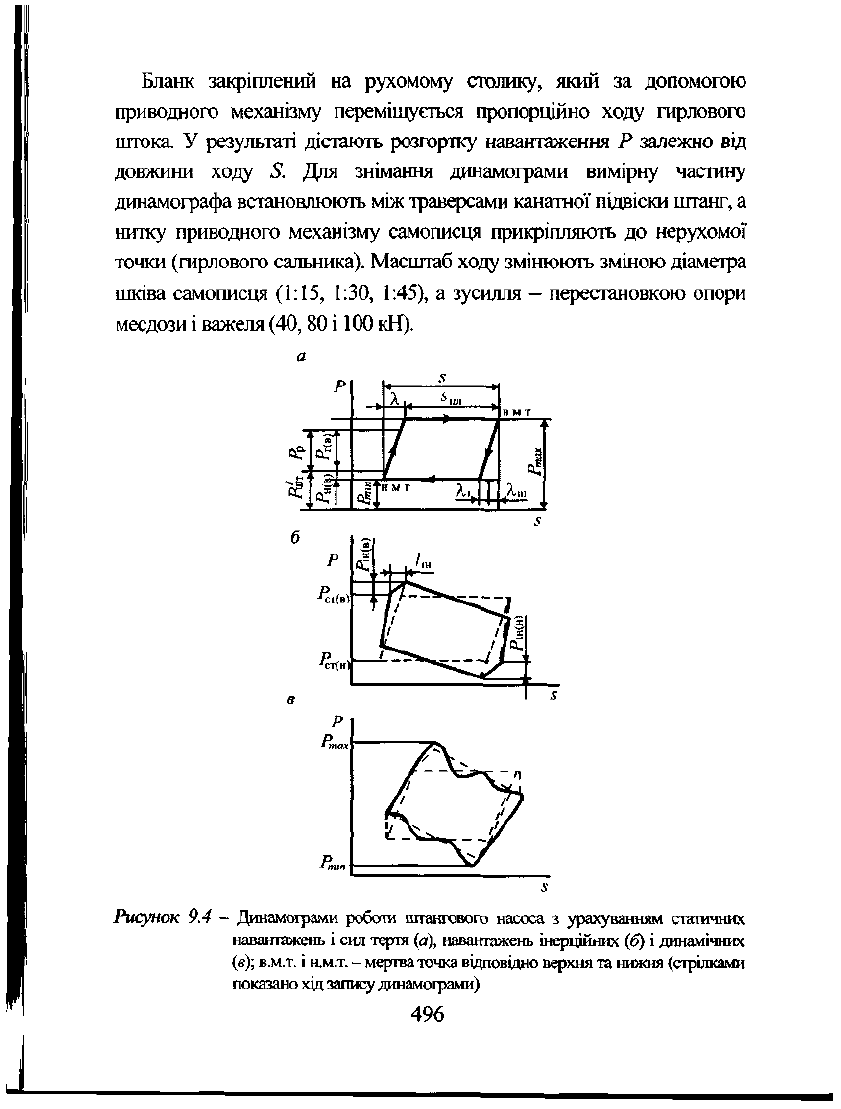
Практичні динамограми за виглядом завжди відрізняються від
теоретичної. Зіставляючи зазначені динамограми, можна виявити
дефекти та неполадки в роботі устатковання
і
насоса
(рис.
9.5).
Таке розшифрування динамограм можливе за невеликих глибин,
малих динамічних навантажень і діаметрів насоса. За великих
динамічних навантажень динамограма, яку отримано за допомогою
ГДМ-3,
значно викривлюється, що утруднює надійний контроль за
роботою насосів. За таких умов доцільно знімати глибинні
динамограми, які відповідають нижньому кінцю штангової
колони,
або
перераховувати динамограми, які отримано за допомогою наземного
динамографа, на глибинні.
Щоб зняти динамограму за допомогою ГДМ-3, потрібно зупинити
верстат-гойдалку. На автоматизованих промислах втілено перехід на
знімання динамограми дистанційно з диспетчерського пункту з
використанням стаціонарно встановлених тензометричних давачів
зусиль
і
давачів лінійних та кутових переміщень.
497
£У [ШІП
<п
L /
1—
/
/
<-ятт
7
/
-4л
Рисунок 9.5 - Практичні динамограми роботи штангового насоса: а - нормальна
тихохідна робота; б - вплив газу; в ~ перевищення подавання насоса
над припливом у свердловину; г - низька посадка плунжера; Ґ- вихід
плунжера з циліндра невставного насоса; д - удари плунжера об
верхню обмежуючу гайку вставного насоса; є - витікання в
нагнітальній частині; ж - повний вихід із ладу нагнітальної частини;
з-повний вихід із ладу всмоктувальної частини; и - напівфонтанний
характер роботи насоса; / - обрив штанг (пунктиром показано лінії
теоретичної динамограми)
Для телемеханізації використовують систему телемеханіки ТМ-620,
яка забезпечує телекерування двопозиційними виконавчими
пристроями ТК, телевимірювання інтегральних (дебіт) TBI і поточних
(тисків та ін.) ТВП значин параметрів, телединамометрування
(телеконтроль) ТД, телесигналізацію аварійного стану ТСА,
телесигналізацію стану двопозиційного об'єкта ТСС, а також
двобічний телефонний зв'язок. Спільно із системою ТМ-620 працює
498
прилад телединамометрування частотний ПТЧ. Система типу
ТМ-660Р "Хазар" як лінію зв'язку має також виділений радіоканал.
Розроблено об'єктно орієнтовані мікропроцесорні комплекси, за допо-
могою яких можна дистанційно керувати кущами (групою) сверд-
ловин із механізованим (газліфтним, насосним) видобуванням нафти.
Дослідження
свердловин,
обладнаних
штанговими насосними
устаткованнями
Свердловини, які обладнано ПІСНУ, досліджують в основному на
усталених режимах з метою одержання індикаторної діаграми Q
(Ар)
і
залежності Q
від
режимних параметрів роботи устатковання.
Згідно з рівнянням (9.2) дебіт задають величинами S і п, змінюючи
одну з них для переходу до другого режиму відбирання рідини.
Дослідження свердловин, обладнаних ШСНУ, утруднюється тим,
що опустити глибинні прилади в насосні труби неможливо, оскільки
цьому перешкоджає колона штанг. У даному разі особливість дослід-
ження порівняно з іншими способами експлуатації свердловин
пов'язана з визначенням вибійного тиску р
в
, який можна визначити
прямим або опосередкованим шляхом. Опосередковані методи
призводять до більших похибок і можуть бути застосовані тільки для
обмеженої кількості свердловин, у тому числі й дуже обводнених.
Необхідної точності результатів можна досягти лише безпосереднім
вимірюванням параметрів у свердловині.
Існують два способи опускання приладів у такі свердловини: на
колоні НКТ; на дроті чи на кабелі. Для прямого вимірювання
вибійного тиску р
в
за першим способом ліфтові свердловинні
манометри підвішували до вхідного патрубка ШСН і опускали у
свердловину разом із НКТ. Годинниковий механізм із багатодобовим
499
заводом забезпечував можливість місцевої реєстрації тиску в процесі
дослідження. Але необхідність виконання спуско-підіймальних опера-
цій НКТ обмежила застосування ліфтових манометрів.
Для прямого вимірювання вибійного тиску
р
в
за другим способом у
затрубний простір на сталевому дроті діаметром
2...2,2
мм через
патрубок гирлового обладнання (за ексцентричного підвішування
НКТ) опускають малогабаритний свердловинний манометр діаметром
22...25.
Одна з основних переваг способу - оперативність. Але в
глибоких і викривлених свердловинах можливі прихоплення і обриви
дроту.
Відомо також спосіб, коли прилади опускають на кабелі, а потім
уже опускають колону труб із насосом.
Прямі вимірювання вибійного тиску р
в
забезпечують отримання
надійних результатів дослідження. Тому доцільно використовувати
давані тиску, що постійно знаходяться у свердловині.
Знайти вибійний тиск р
й
опосередкованим шляхом можна за
формулою гідростатичного тиску
А =
АдРр&
(9.59)
де
/г
д
- висота динамічного рівня рідини; р
р
- середня густина рідини у
свердловині (у затрубному просторі і нижче входу в насос), яку
звичайно беруть такою, що дорівнює густині розгазованої нафти з
урахуванням обводнення (через труднощі
в
її розрахунку).
Глибину /г'
д
від гирла свердловини до динамічного рівня рідини
(глибину динамічного рівня) визначають
ехолотом.
Тоді
h
a
=H-
h\.
Суть ехометрії полягає в такому. У затрубний простір за допомогою
давана імпульсу звукової хвилі (порохової ляпавки) посилається
звуковий імпульс. Звукова
хвиля,
проходячи по стовбуру свердловини,
500