Болдырев Г.Г. Методы определения механических свойств грунтов
Подождите немного. Документ загружается.

Методы измерения деформаций и напряжений
531
На рис. 14.10 показаны различные зависимости «напряжение – осевая
деформация» для песчаника, испытанного при боковом давлении, равном 20
МПа. Осевая и радиальная деформации определены с учетом податливости
рабочей камеры, которая составляет 0,45 МН/мм. Из рис. 14.10 видно
различие в значениях деформации, измеренной внешним и внутренним
датчиками. Измерения на локальной базе показывают меньшее значение
деформации.
14.2.3. Измерение радиальной и осевой деформации
с использованием инклинометров и датчиков Холла
Впервые датчики контроля уровня электрическим способом были при"
менены Cooke and Price (1974) для измерения деформаций в массиве грунта. В
1982 г. Burland and Symes и позднее Symes and Burland (1984) использовали
этот метод в 100 мм стабилометре Imperial College для измерения осевой и
радиальной локальных деформации. Jardine et al. (1984) модифицировали
данное решение, улучшив разрешение датчика для измерения осевой
деформации применительно к образцу грунта диаметром 38 мм. На рис. 14.11
показан инклинометр, который применялся в отмеченных исследованиях.
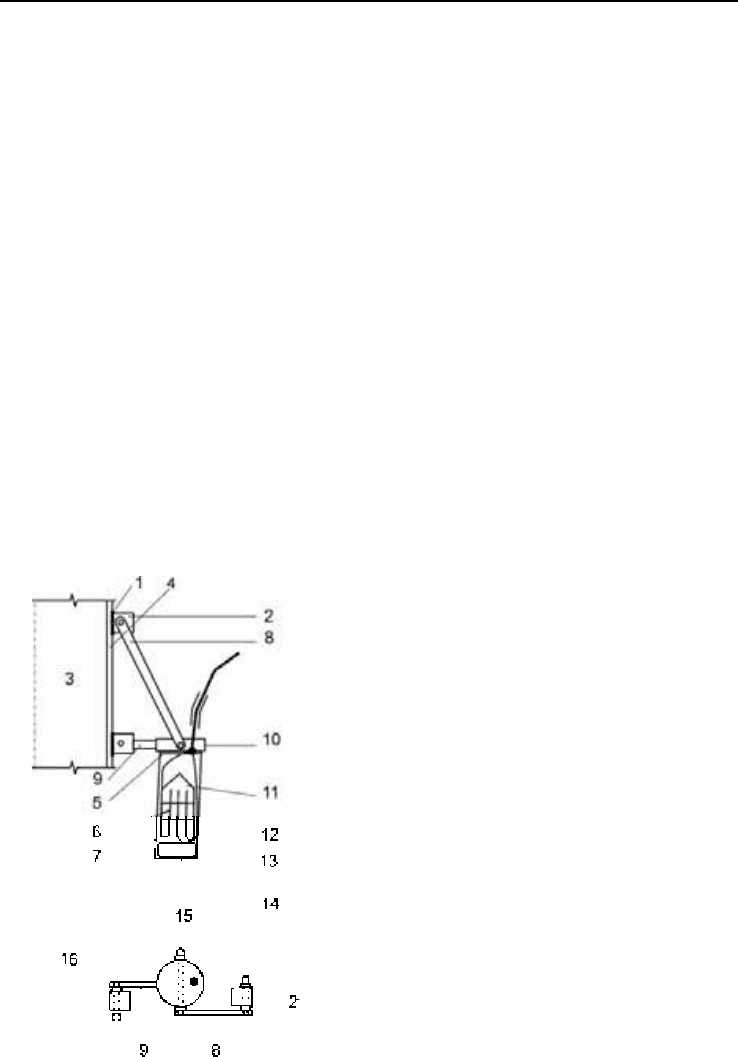
Рис. 14.11. Измерение локальной осевой
деформации с использованием инклинометра
(Kuwano, 2000):
1 – клей; 2 – криволинейная опора; 3 – обра"
зец; 4 – резиновая оболочка; 5 – герметик;
6 – электролитическая капсула; 7 – электрод;
8 – верхнее плечо; 9 – нижнее плечо;
10 – крышка; 11 – стеклянная капсула; 12 –
электролит; 13 – изолятор; 14 – цилиндр из
нержавеющей стали; 15 – шарниры; 16 –
стальная шпилька

Глава 14
532
Инклинометр представляет собой стеклянную капсулу, которя заполнена
электролитом и внутри которой расположены три электрода. Капсула
находится внутри стального цилиндра с медным колпачком, что защищает ее
от давления и воды. Инклинометр подвешивается на двух рычагах к
резиновой оболочке.
Инклинометр работает, превращая изменение расстояния между двумя
опорами в изменение наклона электролитической капсулы. Разрешение угла
наклона около 0,0002
о
. Соотношение между изменением деформации образца и
углом наклона зависит от принятой геометрии устройства крепления (длины
верхнего и нижнего рычагов), которая также определяет рабочий диапазон
деформации. Электролитическая капсула имеет линейный диапазон до
±
10°.
При использовании высшего порядка регрессии можно расширить рабочий
диапазон до
±
20°. Конструкция датчика позволяет проводить измерение
деформации в диапазоне до 15 мм при одинаковой чувствительности в этом
диапазоне. Это свойство позволяет использовать датчик при механической и
электрической оптимизации для образцов любого размера и до деформации
порядка 15 %.
Поведение во времени инклинометра ограничено вязкостью электро"
литической жидкости и временем фильтрации аналогового сигнала. Ошибка
чтения показаний снижается с уменьшением скорости нагружения образца.
При скорости деформации менее 0,2 мм/мин величина ошибки
незначительна.
Показания датчиков данной конструкции зависят от температуры
окружающей среды. Производители инклинометров рекомендуют их ис"
пользовать при изменении температуры не более
±
5 °С. Опыты при нагру"
жении до деформации в 10 %, выполненные при комнатной температуре,
показали несущественное изменение показаний датчиков во времени.
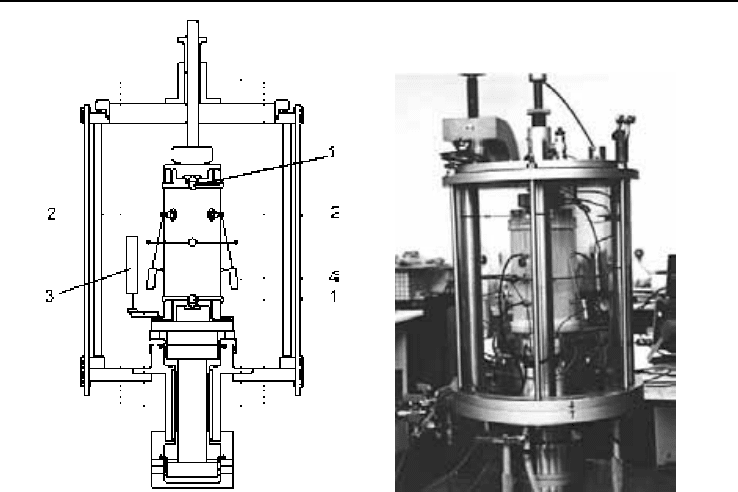
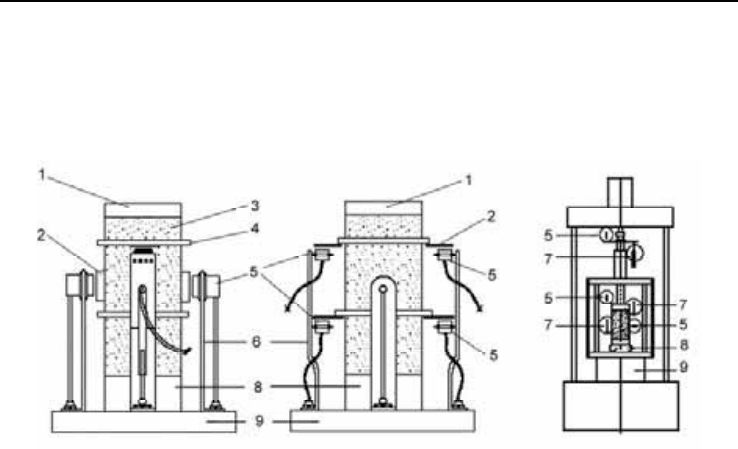
На рис. 14.12 представлена камера стабилометра с инклинометрами для
измерения локальной осевой деформации. Диаметр образца грунта 100 мм, высота
200 мм. Осевая нагрузка создается гидравлически с использованием камеры
давления, находящейся в основании стабилометра. Устройство нагружения,
боковое давление и обратное давление контролируются с помощью авто"
матической системы, которая разработана в Imperial College (Toll and Ackerley,
1988) и которая допускает изменение давления не более 0,06 кПа. Микро"
процессор контролирует постоянную скорость перемещения плунжера
гидравлического цилиндра в процессе испытаний с заданной скоростью
деформации.
Стандартные датчики применяются для измерения давления, датчик силы
находится внутри рабочей камеры. Гладкие стальные плиты объединены с
резиновым диском для снижения сил трения между нагрузочным штампом и
образцом грунта. Для уменьшения эффекта концевых ограничений приме"
няются штампы, площадь которых больше, чем площадь поперечного
сечения образца грунта.
Методы измерения деформаций и напряжений
533
(а)
(б)
Рис. 14.12. Схема измерения осевой деформации (а) и внеший вид камеры давления (б)
(Kuwano, 2000):
1,2 – датчики для измерения продольной и поперечной волн, соответственно;
3 – датчик осевой деформации LVDT; 4 – инклинометр
Измерения полной осевой деформации, изменения объема, локальной
осевой деформации и локальной радиальной деформации в течение
испытаний выполняются со скоростью 40 считываний в 1 с. Разрешение
датчиков деформации порядка 0,0001 % при использовании 16"разрядного
АЦП.
Датчики деформации, основанные на эффекте Холла, применяются
значительно реже, несмотря на то что они просты в изготовлении и
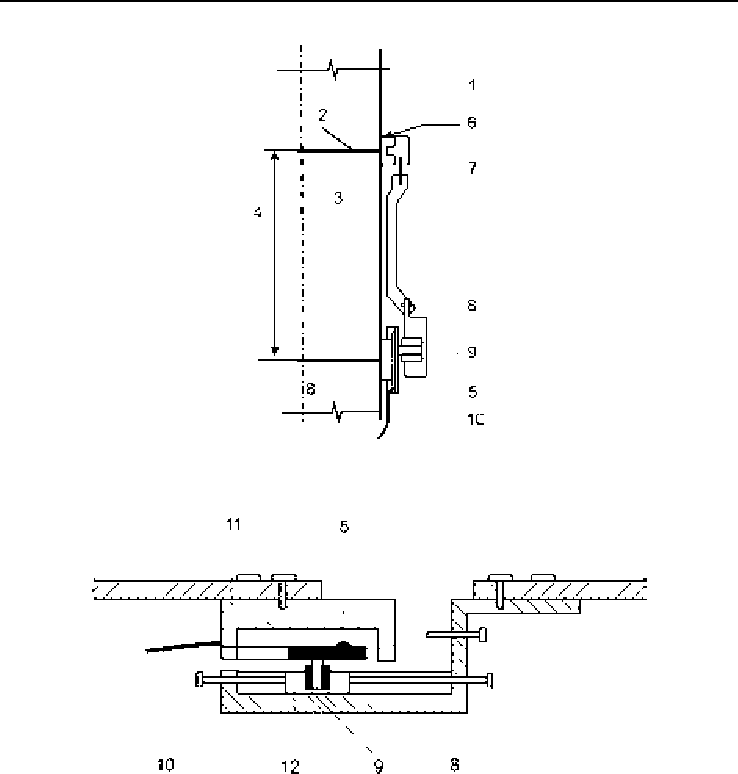
обеспечивают требуемую точность измерений. На рис. 14.13 приведена кон"
струкция датчика вертикальной и радиальной деформации, предложенная
впервые в 1986 году Clayton and Khatrush, а на рис. 14.14 – конструкция
подобных датчиков фирмы GDS.
Глава 14
534
(а)
(б)
Рис. 14.13. Датчики для измерения осевой и радиальной деформации
с использованием эффекта Холла:
1 – резиновая оболочка; 2 – шпилька; 3 – образец; 4 – длина базы датчика;
5 – датчик Холла; 6 – клей; 7 – пружина; 8 – регулировочный винт; 9 – прямоугольные
магниты; 10 – соединительный кабель; 11 – латунный корпус; 12 – смещаемый блок
Методы измерения деформаций и напряжений
535
Принцип работы датчиков дефор"
мации основан на следующем эф"
фекте. Если металлическую или полу"
проводниковую пластинку, через кото"
рую проходит ток, разместить в маг"
нитном поле, где линии магнитного
потока направлены перпендикулярно
к пластинке и потоку электрического
тока, то это приведет к накоплению
отрицательного заряда на одной грани
пластинки и положительного на дру"
гой. Это явление возникновения попе"
речной разности потенциалов при
помещении проводника с постоянным
током в магнитное поле называется
эффектом Холла, которое он обнаружил
в 1879 году.
Эффект Холла широко используется для измерения напряженности
магнитного поля и значительно реже – для измерения линейной деформации.
В последнем случае полупроводниковый датчик Холла линейно смещается
относительно постоянного магнита (или наоборот), а возникающее при этом
напряжение регистрируется измерительной системой.
Применение рассмотренных датчиков для измерения деформации
позволяет просто и точно измерить большие деформации (до 20 % и более).
При измерении полного диапазона деформации с точностью выше 0,1 %
возникают определенные сложности, обусловленные как конструкцией
датчиков, так и влиянием окружающей среды. Известно, что чем меньше
измеряемый диапазон, то тем выше точность измерений деформации. В связи
с этим в некоторых стабилометрах (Lo Presti et al., 1993, 1995) одновременно
используются два различных типа датчиков для измерения малых и больших
значений деформации образца грунта. При измерении деформаций от 0,1 до
20% применяются датчики перемещения LVDT или тензометрические
датчики LDT с соответствующим диапазоном и точностью измерения, при
измерении малых деформаций – бесконтактные индуктивные датчики.
Принцип работы индуктивного датчика основан на регистрации изменений
электромагнитного поля датчика, вызываемых металлическим объектом. В
качестве металлического объекта используется кусочек фольги, наклеенный
на резиновую оболочку. На рис. 14.15,а приведена схема расположения
бесконтактных датчиков для измерения осевой и радиальной деформации, а
на рис. 14.15,б – схема измерения осевой и радиальной деформации с
использованием двух типов датчиков: датчиков трансформаторного типа
LVDT и индуктивных бесконтактных датчиками (Pradhan et al., 1989;
Fioravante et al., 1993; Shibuya et al., 1994). Опыты показали, что при исполь"
зовании бесконтактных датчиков различия между измерениями локальной и
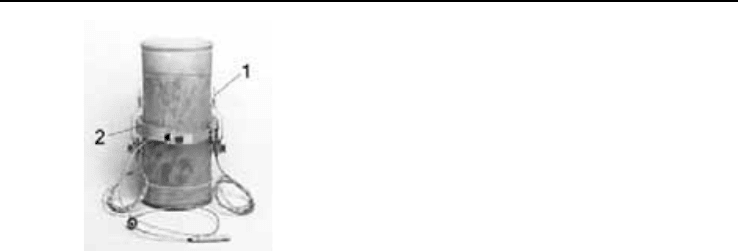
Рис. 14.14. Устройства для измерения осе"
вой и радиальной деформации, осно"
ванные на эффекте Холла и выпускаемые
серийно фирмой GDS Instrument
(www.gdsinstruments.com):
1 – датчик осевой деформации; 2 – датчик
радиальной деформации
Глава 14
536
полной деформации практически отсутствуют при малых деформациях
(<5×10
"5
) и возрастают с ростом деформации в диапазоне от 10
"4
до 10
"3
.
Различия в показателях измерений деформации бесконтактными датчиками и
датчиками трансформаторного типа также имеют место, но проявляются
только при осевой деформации более 0,004 %.
(а) (б)
Рис. 14.15. Применение бесконтактных датчиков для измерения
осевой и радиальной деформации:
а – схема размещения бесконтактных датчиков деформации; б – схема размещения
бесконтактных и трансформаторных датчиков деформации: 1 – штамп; 2 – диск;
3 – образец; 4 – кольцо; 5 – бесконтактный датчик; 6 – стойка крепления датчика; 7 –
датчик LVDT; 8 – основание; 9 – плита
14.3. Определение объемной деформации
Определять изменение объема образцов грунта необходимо в случаях,
когда проводятся дренированные испытания водонасыщенных и не пол"
ностью водонасыщенных образцов грунтов или в испытаниях на
проницаемость грунтов. Требования к устройствам для измерения объема
были сформулированы Lade (1988). Известно несколько методов измерения
изменения объема (Alva"Hurtado and Selig, 1981).
Сущность первого метода заключется в следующем: измеряется объем
жидкости, который вводится в камеру давления или вытекает из нее, чтобы
компенсировать изменение объема образца. При использовании второго
метода измеряется объем воды, вводимый в поровое пространство образца
или вытекающий из него. В третьем методе изменение объема образца вы"
числяется путем измерения размеров образца (высоты и диаметра). Первый и
третий методы подходят для испытаний как водонасыщенных, так и не
полностью водонасыщенных грунтов, в то время как второй метод применим
только для водонасыщенных грунтов. Обзор устройств для измерения изме"

Методы измерения деформаций и напряжений
537
нения объема приведен в работах Бишоп и Хенкель (1962), Alva"Hurtado and
Selig (1981) и Geiser et al. (2000).
Проблема измерения изменения объема образца грунта в стабилометре
или иных других приборах может быть решена различными способами. В
настоящее время созданы следующие системы измерения, основанные на:
• измерении как объема воды, так и объема воздуха, выжимаемого из
образца (Bishop and Henkel, 1962; Matyas, 1967; Adams et al., 1996);
• измерении уровня (Bishop and Donald, 1961; Matyas and Radharkrishna,
1968; Josa et al., 1987; Okochi and Tatsuoka, 1984; Tatsuoka, 1998; Cui and Delage,
1996; Shamoto et al., 1996);
• измерении изменения объема жидкости, заполняющей внутреннюю
камеру в стабилометрах с двойной камерой давления (Wheeler, 1986, 1988;
Sivakumar, 1993; Wheeler and Sivakumar, 1995);
• локальном измерении деформации (Maswoswe, 1985; Maaouk, 1993;
Maatouk et al., 1995; Zakaria, 1995).
Имея результаты измерения изменения объема образца, можно вычислить
радиальную деформацию. Этот непрямой метод определения радиальной
деформации был предложен Wawesik (1975): при полном заполнении камеры
давления в стабилометре жидкостью изменение объема образца грунта равно
изменению объема жидкости в камере давления. Используя это пред"
положение и результаты выполненных опытов, он связал изменение объема в
камере давления с функцией деформации образца. Для однородной
деформации образца радиальная деформация определяется выражением
⎡
⎤
Δ
ε=ε= − ε+ + ε+
⎢
⎥
−ε
⎣
⎦
∑
23 213 415
11
1
()()
1
V
CCFC CF
C
, (14.1)
где
=
1
2;
tt
CAL
ν
=
2
;
s
s
t
C
EA
⎛⎞
ν
=
⎜⎟
⎜⎟
−
⎝⎠
3
;
st
st p t
L
C
EA L L
⎛⎞
−
=
⎜⎟
⎝⎠
4
;
2
ts
t
A
A
C
A
=
5
;
c
s
tt
L
C
EAL
t
A
– площадь поперечного сечения образца грунта в месте его контакта с
верхним штампом;
t
L
– длина образца;
s
A
– площадь поперечного сечения
штока;
ν
,
s
s
E
– упругие константы штока и верхнего штампа;
p
L –
внутренняя длина камеры давления;
F – осевая сила; ΔV – изменение
объема, полученное регулированием бокового давления.
14.3.1. Измерение изменения объема образца грунта
с использованием датчиков перемещения
При измерении изменения объема с использованием датчиков верти"
кальных и радиальных перемещений неопределенность формы образца в
процессе его деформации оказывает влияние на точность измерения. Форма
образца мягкопластичного связного грунта изменяется от цилиндрической до
Глава 14
538
симметрично"бочкообразной, образец твердого связного грунта и плотного
песка может стать несимметрично"бочкообразным с полосами сдвига. При
вычислении изменения объема образца принимается допущение о той или
иной форме образца; например, образующая остается прямолинейной до
осевой деформации 3 %, а затем становится параболой или дугой окружности
(Васильев Ю.П., 1998; Klotz, 2002).
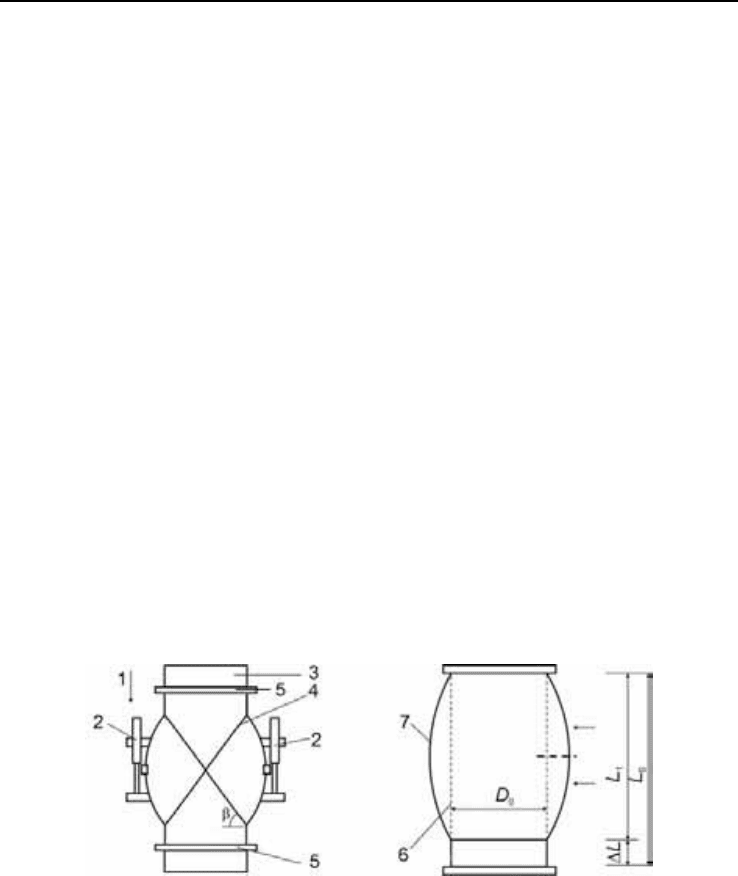
Применение смазанных концевых плит не исключает эффекта бочко"
образования, так же как и образования полос сдвига. Этот эффект влечет за
собой большие различия между значениями объемной деформации,
измеренной внутренними датчиками (рис. 14.16,а), показаниями датчиков на
полной высоте образца и значениями изменения объема образца, полу"
ченными замером объема воды, вытесненной из внутренней камеры прибора
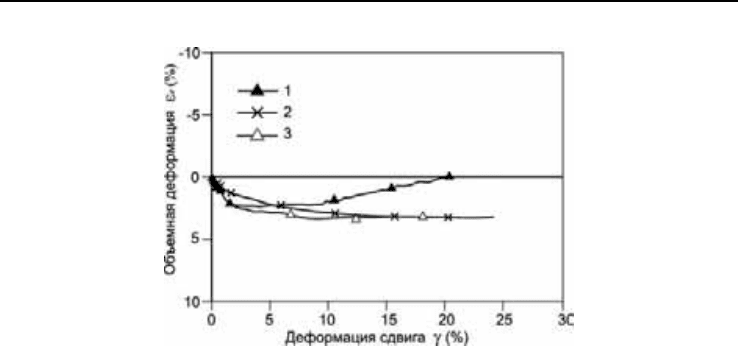
(рис. 14.17, кривая 2). Прямое сравнение показаний локальных датчиков и
датчиков измерения изменения объема водонасыщенных образцов песка
продемонстрировано на рис. 14.17. Здесь видны существенные различия,
возникающие при больших деформациях.
Корректировку результатов измерений выполняют с учетом выше"
сказанного, полагая, что образующая формы образца при его дефор"
мировании в вертикальном сечении превращается из прямой в дугу окруж"
ности с постоянным радиусом внизу и вверху образца грунта, так как
показано на рис. 14.16,б (Васильев Ю.П., 1998; Klotz, 2002). На рис. 14.17
приведена кривая 3, полученная после корректировки объема образца грунта.
В действительности диаметр образца на концах также изменяется при смазке
нагрузочных штампов.
(а) (б)
Рис. 14.16. Определение объемной деформации:
а – измерение локальной осевой и радиальной деформации; б – расчетная схема
определения объема (Klotz, 2002):
1 – направление нагружения; 2 – локальный датчик LVDT; 3 – штамп; 4 – полоса сдвига;
5 – полированный, смазанный диск; 6 – начальная форма образца; 7 – конечная форма
образца
Методы измерения деформаций и напряжений
539
Рис. 14.17. Определение объемной деформации с использованием двух методов
(Klotz, 2002):
1 – нескорректированный локальный датчик; 2 – прямой датчик измерения изменения
объема; 3 – скорректированный локальный датчик
Однако если использовать локальные датчики осевой и радиальной
деформации, то изменение объема образца определяется на базе датчиков
вертикальной деформации, которые располагаются в центральной части, где
форма образца несущественно отличается от цилиндра. Подобная техника
измерения применяется редко. Во"первых, в большинстве случаев на
практике датчики осевой деформации размещаются вне рабочей камеры. Во"
вторых, трудоемкость и, следовательно, стоимость испытаний с измерением
локальной осевой и радиальной деформации резко возрастают.
В частично водонасыщенных грунтах изменение объема связано с
изменением объема воздуха и воды в порах. Известны два хорошо себя
зарекомендовавших на практике метода измерения измерения объема: по
объему жидкости вытесняемой из камеры давления, и по измерению
деформации образца внутри камеры.
В первом методе объем измеряется путем контроля избыточного давления
в камере – сверх заданного бокового, возникающего при деформации
образца. Однако этот метод чувствителен к изменениям температуры и
давления и показывает приемлемые результаты только при выполнении
определенных условий. Во втором методе используются датчики деформации,
расположенные непосредственно на образце грунта. Общий объем образца
определяется путем измерения локальной осевой и радиальной деформации,
второй метод может дать точные значения изменения объема образца в
большом диапазоне его деформаций.
Для измерения локальной осевой деформации могут быть применены два
датчика LVDT, смонтированные диаметрально противоположно относи"
Глава 14
540
тельно друг друга в центральной части образца грунта. Радиальная дефор"
мация определяется непосредственно, так как непрямой метод дает неточные
значения по величине объемной деформации при деформации менее 0,01%.
Предложены различные методы для определения локальной радиальной
деформации: датчики с эффектом Холла, датчики LVDT, тензометрические
датчики LDT, оптические датчики (Cole, 1978; Clayton et al., 1989; Lo Presti et
al., 1995; O’Connor, 1994; Skopek and Cyre, 1995; Kolymbas and Wu, 1989;
Baumgard et al., 1995).
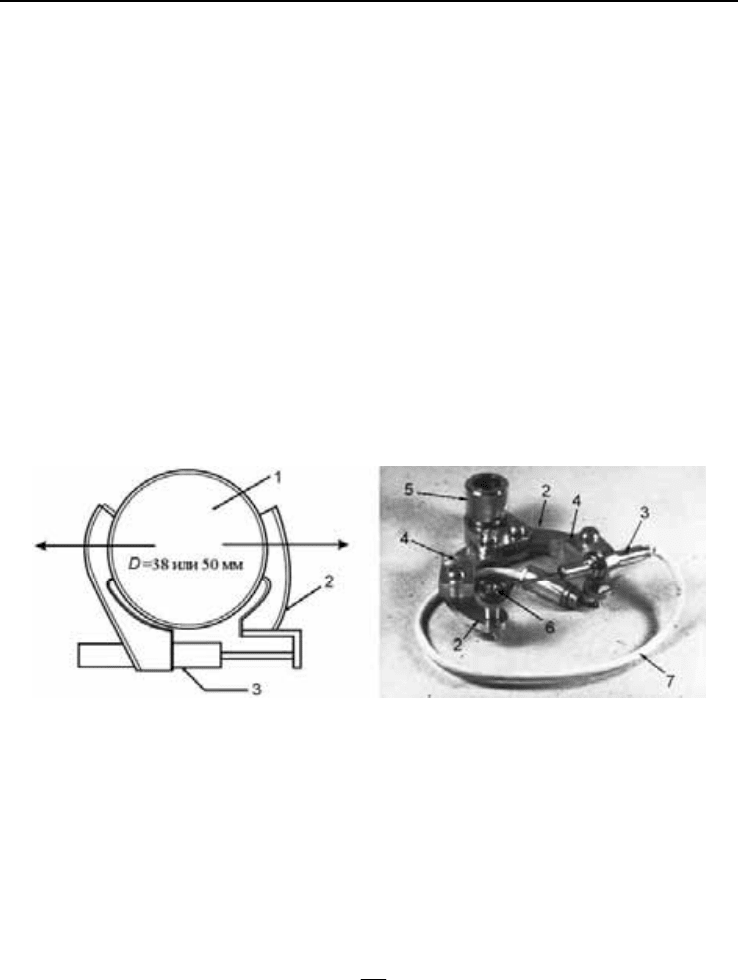
На рис. 14.18 показано устройство для измерения радиальной дефор"
мации, предложенное, по всей видимости, впервые Бишопом и Хенкелем
(1962). Такие устройства легко монтируются, нечувствительны к изменению
давления в камере, имеют относительно небольшую массу (до 44 г),
обеспечивают точность измерения радиальной деформации, соответст"
вующую, вычисленной через изменение объема и полную осевую
деформацию. Датчик включает в себя две алюминиевые консоли, каждая из
которых приклеивается непосредственно к резиновой оболочке (рис. 14.18,а)
и касается поверхности образца через кулачки.
(а) (б)
Рис. 14.18. Устройство для измерения радиальной деформации:
а – Cabarkapa еt al. (2006); б – ООО «НПП «Геотек»:
1 – образец; 2 – кулиса; 3 – датчик перемещения LVDT; 4 – кулачок; 5 – штанговый
зажим; 6 – подшипник; 7 – кабель
Измеряя изменение диаметра образца, объемную деформацию
определяют с использованием следующего выражения:
⎛⎞
ε=− −ε
⎜⎟
⎝⎠
2
1
1(1)
i
v
o
D
D
, (14.2)
где
i
D
– текущий диаметр;
o
D
– начальный диаметр;
ε
v
и
ε
1
– текущие
объемная и осевая деформации, соответственно.