Болдырев Г.Г. Методы определения механических свойств грунтов
Подождите немного. Документ загружается.

Информационно!измерительные системы для испытаний грунтов
151
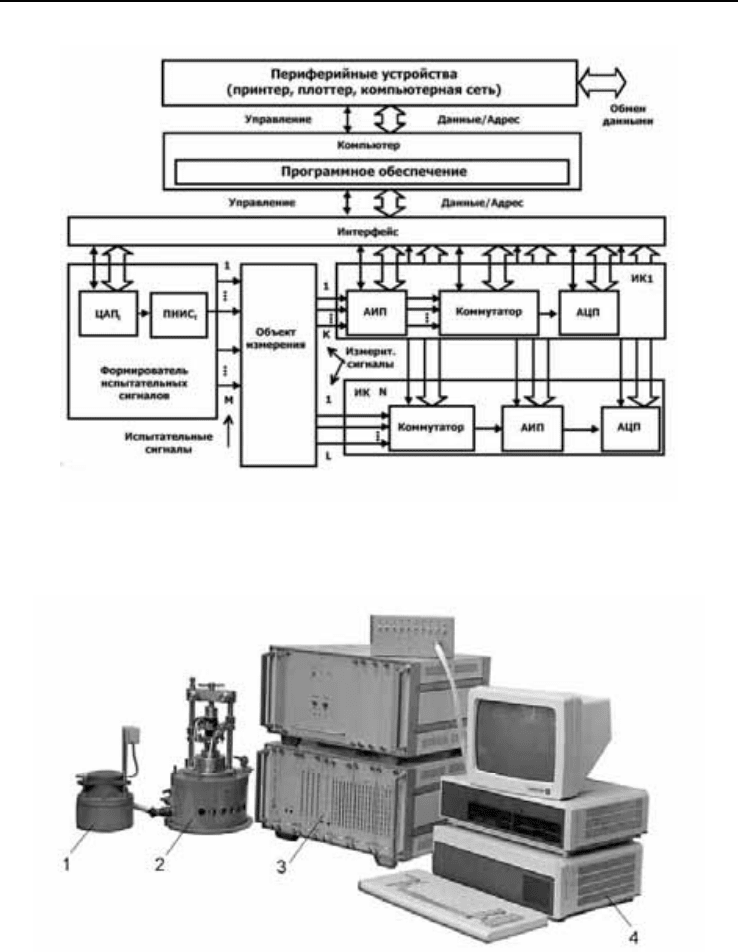
Рис. 4.1. Структурная схема измерительноAвычислительного комплекса
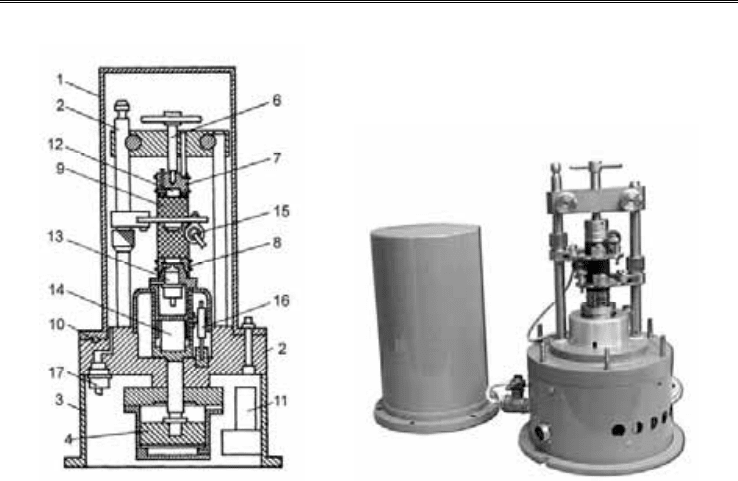
Рис. 4.2. Автоматизированная система АСИС (1991):
1 –
компрессионный прибор; 2 – стабилометр; 3 – блоки электроники; 4 – компьютер
ЕСA1841
Глава 4
152
Рис. 4.3. Конструкция стабилометра МП «Геотек» (Болдырев, 1991):
1 –
колпак; 2 – опорная плита; 3 – основание; 4 – пневмоцилиндр двойного действия;
5 –
стойка; 6 – винт; 7,8 – нагрузочные штампы; 9 – образец грунта; 10 – уплотнительное
кольцо; 11 – пневмоклапаны; 12 – акустический датчик; 13 – датчик порового давления;
14 –
датчик силы; 15 – датчик радиальных перемещений; 16 – датчик вертикальных
перемещений; 17 – датчик бокового давления
В период 2000–2007 гг. в ООО «НПП «Геотек» был разработан новый
измерительноAвычислительный клмплекс, получивший название АСИС
(
автоматизированная система испытаний в строительстве). На рис. 4.4
приведена структурная схема измерительноAвычислительного комплекса
ИВК АСИС (www.geoteck.ru), а на рис. 4.5 – фотография комплекса,
включающего в себя компьютер, блок электронной преобразующей
аппаратуры, стабилометр, компрессионный прибор, приборы одноплоскостA
ного среза со статическим и кинематическим нагружением, компрессионный
прибор с измерением боковых напряжений. Количество и сочетание
входящих в ИВК АСИС приборов определяются заказчиком и могут быть
произвольными. Стандартный комплект для геотехнических лабораторий
состоит из 8A12 компрессионных приборов, трех приборов одноплоскостного
среза со статическим нагружением, одного прибора с кинематическим нагруA
жением и одного или двух стабилометров.
Информационно!измерительные системы для испытаний грунтов
153
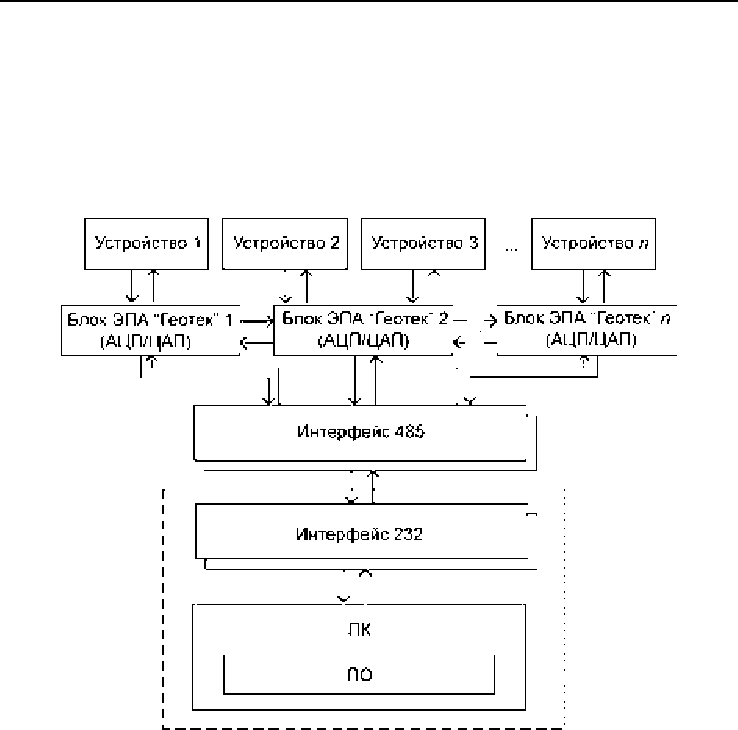
Рис. 4.4. Структурная схема
измерительноAвычислительного комплекса ИВК АСИС
Следует отметить, что первые измерительные системы для автоматиA
зированных испытаний образцов грунта в стабилометре появились за
рубежом в начале 70Aх гг. прошлого столетия. По всей видимости, в России
первый автоматизированный стабилометр СПA55 был разработан в НИИОСП
им. Н.М.Герсеванова в 1973 году (Голубев М.А. и др., 1974).
Глава 4
154
(а)
(
б)
(
в)
(
г)
(
д)
(
е)
(
ж)
(
з)
(
и)
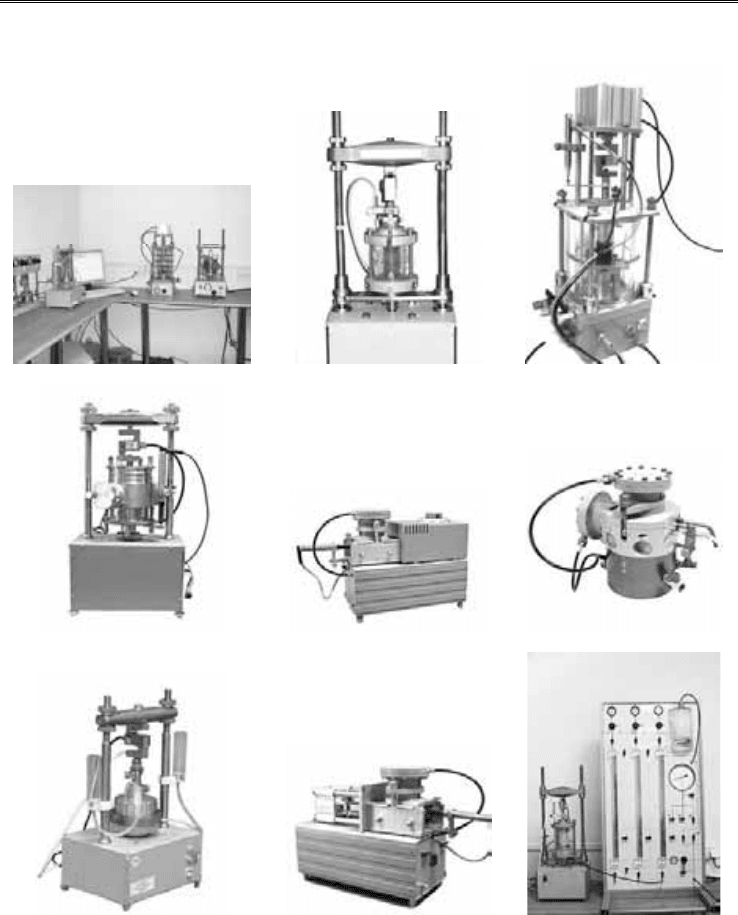
Рис. 4.5. Комплект ИВК АСИС:
а – рабочее место лаборанта; б – стабилометр типа Б; в – стабилометр типа А; г –
компрессионный прибор с измерением боковых напряжений; д – прибор прямого среза с
кинематическим нагружением; е – прибор прямого среза со статическим нагружением;
ж – компрессионный прибор; з – прибор прямого среза; и – стабилометр с панелью
управления давлением
Информационно!измерительные системы для испытаний грунтов
155
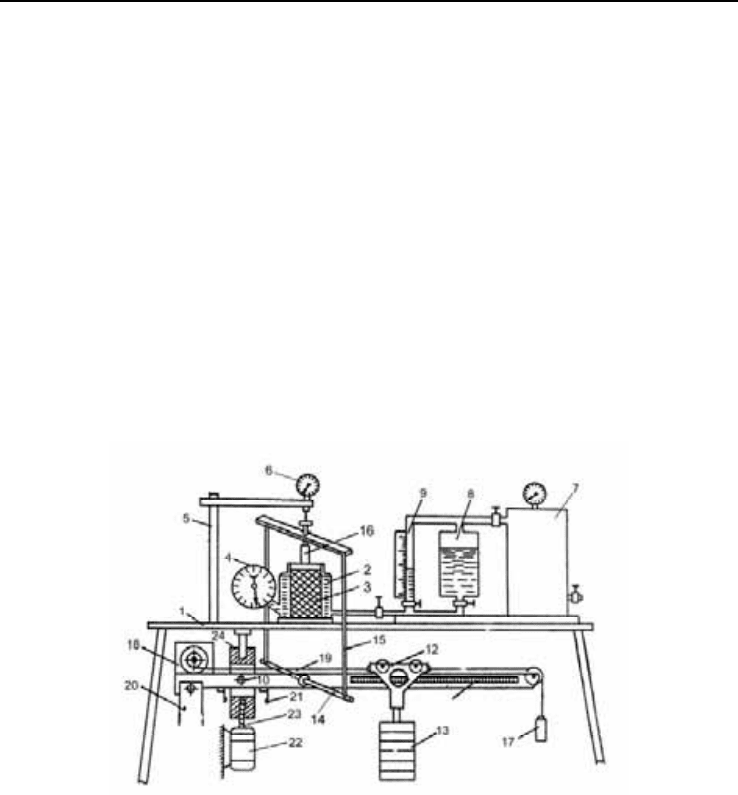
В стабилометре СПA55 (рис.4.6) боковое давление на образец создается с
помощью пневмогидравлической системы, обеспечивающей точность измеA
рения изменения объема и поперечных деформаций образца. Прибор
смонтирован на столе 1 размером 700х1000 мм. На плите размещена рабочая
камера 2 из оргстекла, в которой устанавливается образец грунта 3 диаметром
55
и высотой 110 мм. Камера оборудована образцовым манометром 4 с
точностью отсчета 0,001 МПа. На плите стола размещены стойка 5 для
установки индикатора 6, ресивер 7 для сжатого воздуха и устройство для
измерения поперечных деформаций образца, в которое входят бачок 8 и
водомерная трубка 9, параллельно включенные в гидросистему. Под плитой
стола на оси 10 закреплен грузовой рычаг 11, по которому перемещается
каретка 12 с подвешенным к ней грузом 13. От рычага 11 через коромысла 14,
соединенные тягами 15, и пуансон 16 осевая нагрузка передается на образец 3.
При удалении каретки 12 от оси рычага плечо действия груза увеличивается, и
осевое давление на образец возрастает от нуля до максимального значения
(800
кПа).
Рис. 4.6. Стабилометр СПA55 (Голубев М.А. и др., 1974)
Каретка перемещается под действием пригруза 17, причем скорость ее
перемещения регулируется часовым механизмом 18, выводной шкив которого
связан с кареткой струной 19. В результате использования разных ручьев
ступенчатого шкива и перестановки сменной шестерни может быть задано
шесть значений скорости нагружения. При этом полное время опыта (т.е.
время перемещения каретки до конца рычага) составляет: 2, 3, 6 ч – на
Глава 4
156
быстрых режимах и 2, 3, 5 сут – на медленных. При начальном положении
каретки рычаг уравновешивается регулируемым противовесом 20.
В течение всего опыта грузовой рычаг поддерживается в строго
горизонтальном положении следящей системой, состоящей из контактов 21 и
электропривода 22, изменяющего с помощью винтовой пары 23 и ползуна 24
положение оси грузового рычага.
Боковое давление на образец создается водноAглицериновой смесью,
заполняющей рабочую камеру и находящейся под давлением сжатого газа (азота
или воздуха), который предварительно накапливается в ресивере 7. Поперечные
деформации образца определяются путем измерения объема жидкости,
вытесняемой из рабочей камеры (или нагнетаемой в рабочую камеру) в ходе
опыта. Такое измерение производится по изменению положения мениска
жидкости в водомерной трубке 9. В ходе опыта водомерная трубка многократно
заполняется жидкостью из бачка 8, что позволяет использовать трубку малого
поперечного сечения. Этим обеспечивается равная точность измерения осевых
и радиальных деформаций образца. Точность измерения изменения объема
составляет 0,0413 см
3
, а поперечных деформаций – 0,63
×
10
A4
.
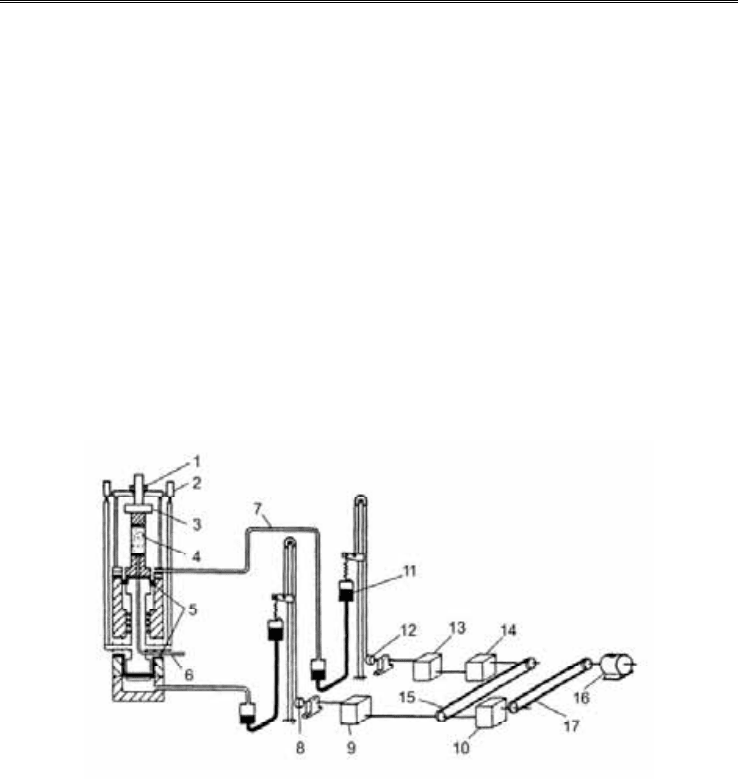
Рис. 4.7. Гидравлическая система контроля траекторий напряжений
Bishop and Wesley (1975):
1 –
винт; 2 – индикатор перемещения; 3 – датчик силы; 4 – образец; 5 – чулочная
мембрана; 6 – дренаж; 7 – вода; 8,12 – лебедки; 9, 13 – двухступенчатые редукторы;
10, 14 –
вариаторы Коппа; 11 – ртуть; 15, 17 – ременные передачи; 16 – электромотор
Первая электромеханическая измерительная система за рубежом была
разработана в 1975 году Bishop and Wesley (рис. 4.7) и имела две главные
особенности. ВоAпервых, траектория напряжений контролировалась гидравA
лически с применением механического метода без использования микроA
компьютера. ВоAвторых, в рабочей камере стабилометра вместо плунжера
были введены две чулочные мембраны, что привело к более сложной схеме
Информационно!измерительные системы для испытаний грунтов
157
управления осевым нагружением изAза разницы площадей мембраны и
образца грунта.
В 1985 году Atkinson J.H. заменил механическую часть системы контроля
траектории напряжений на пневмогидравлическую с ручным или автомаA
тическим управлением (рис. 4.8).
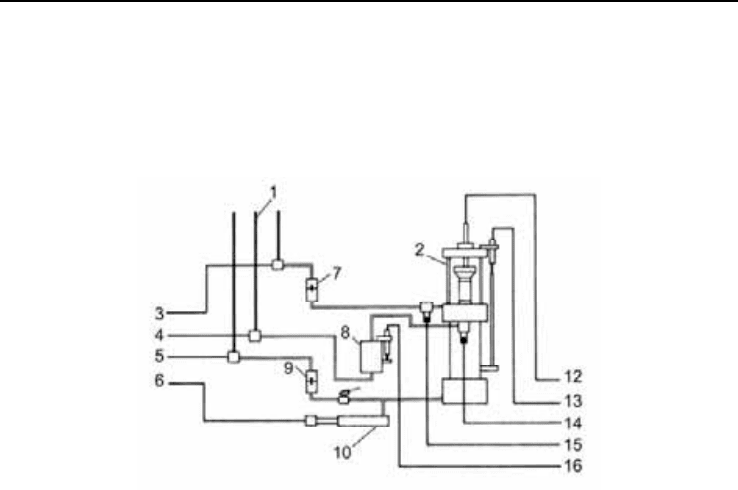
Рис. 4.8. Измерительная система с электропневматическим управлением гидравлическим
нагружением (Atkinson, 1985):
1 –
от источника сжатого воздуха; 2 – камера давления Bishop and Wesley; 3, 14 – к
датчикам давления; 4 – поровое давление; 5 – осевое напряжение; 6 – осевая деформация;
7, 9 –
цилиндры давления воздух – вода; 8 – устройство измерения изменения объема
образца; 10 – устройство контроля давления в цилиндре двойного действия; 11 – шаровой
кран; 12 – к датчику силы; 13 – к датчику осевого перемещения; 14 – датчик порового
давления; 15 – к датчику давления в камере; 16 – к датчику перемещения (устройства
контроля изменения объема)
4.1. Измерительные системы для испытаний образцов грунтов
При разработке измерительных систем для исследования напряженноA
деформированного поведения грунтов в лабораторных условиях существует
несколько проблем, которые не решены до настоящего времени.
Одна из них – определение деформационных свойств при чисто упругом
поведении грунтов. Сложность заключается в том, что до сих пор технически
достаточно трудно измерить малые деформации: абсолютную – менее 0,001
мм или относительную – менее 0,001 %. Необходимость измерения с данной
точностью заключается в том, что в большинстве известных приборов при
нагружении ступенями возникает остаточная – пластическая – деформация
грунта. При больших ступенях нагружения деформации (> 0,001 мм) могут
быть уже упругопластическими с большой долей пластической деформации.

Глава 4
158
При использовании упругой модели грунта для расчета осадки фундаA
ментов или решения иных инженерных задач, связанных с определением
деформации, необходимо предварительно найти модуль деформации и коэфA
фициент Пуассона. Нагружение образцов должно проводиться достаточно
малыми ступенями, так, чтобы на каждой ступени поведение грунта было
чисто упругим. Однако если мы проводим испытания при нагружении дефорA
мацией ступенями 0,01 мм, то, например, для образца грунта в стабилометре с
высотой 76 мм относительная деформация составит 0,013 %. Во многих слуA
чаях эта величина деформации не является уже упругой, и, следовательно, неA
обходимо проводить опыты с измерением абсолютной деформации 0,001 мм
и менее.
Учитывая это, стали разрабатывать измерительные системы, позволяA
ющие измерять относительную деформацию менее 0,001%. Первые работы в
этом направлении были выполнены в университете Токио (Tatsuoka, 1988),
хотя необходимость этого осознавали и ранее, в середине 70Aх гг. прошлого
столетия. Здесь следует вспомнить выступления на семинарах и конфеA
ренциях профессора А.Л.Крыжановского (МГСУ), который говорил о необA
ходимости измерения деформации с точностью 0,001 мм и выше. Сделать это
в 1980Aе годы было невозможно просто по техническим причинам.
Одной из первых подобный измерительных систем стала система,
созданная в Японии под руководством профессора F.Tatsuoka (Pradhan et al.,
1989).
В то же время в работе Dasenbrock есть ссылка на монографию Denning
(1992),
где приводится описание первой автоматизированной системы для
испытания материалов в лабораторных условиях.
С целью более точного измерения осевой нагрузки и объемной
деформации в Institute of Industrial Science of the University of Tokyo была
разработана измерительная система для управления прибором трехосного
сжатия. Данная измерительная система (Ampadu and Tatsuoka, 1989; Pradhan
et al., 1989)
была предназначена для автоматизированного управления испыA
таниями образцов в стабилометре. Основные компоненты системы показаны
на рис. 4.9.
Для более точного измерения осевой нагрузки датчик силы 1 расположен
не снаружи, а внутри камеры давления. Это исключает влияние сил трения в
плунжере и необходимость учета выталкивающей силы, действующей на
шток плунжера при создании давления в камере. Измерение осевой
деформации выполнено с использованием бесконтактного датчика 4, нахоA
дящегося внутри камеры давления выше уровня воды. Эффективное
радиальное давление, действующее на образец, измерено прямым способом с
помощью дифференциального датчика высокого разрешения 6. Устройство
электронного баланса 7 (Pradhan et. al., 1986) применено для измерения
изменения объема образца при действии обратного давления. Точность
измерения баланса
±
0,001 г. Осевое нагружение выполнено с использоваA
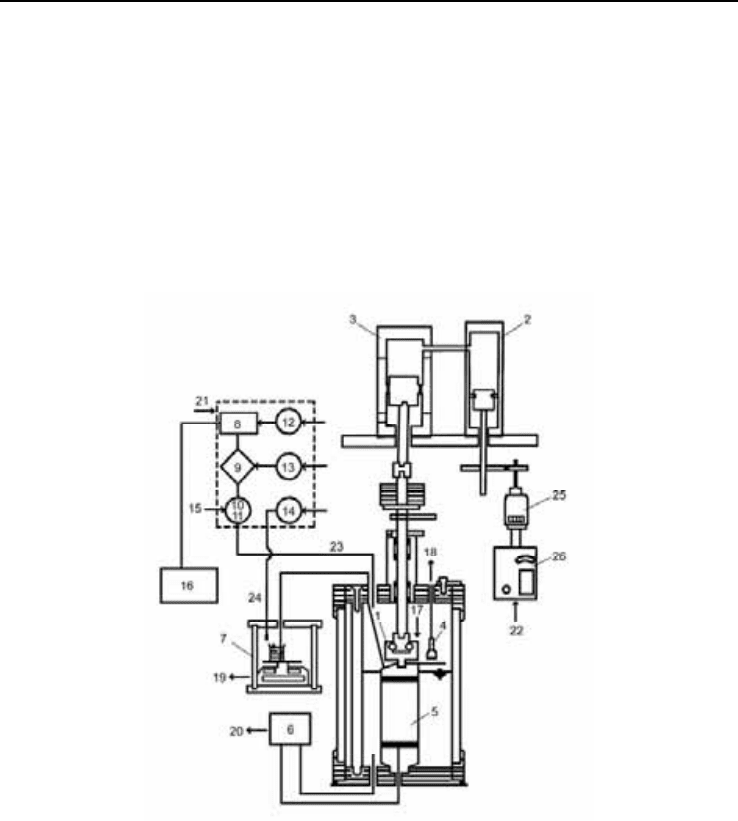
Информационно!измерительные системы для испытаний грунтов
159
нием цилиндра давления 2, заполненного маслом. Давление в цилиндре 2 и
цилиндре двойного действия 3 контролируется микрокомпьютером 6 и
12A
разрядными АЦП и ЦАП. Для контроля давления в камере стабилометра
используются блок реле и электромагнитные клапаны с датчиками давления,
которые управляются микрокомпьютером также через 12Aразрядные АЦП и
ЦАП. Наименьшее контролируемое давление равно 0,03 кПа. Точность
измерения напряжений и деформаций определяется количеством разрядов
АЦП и ЦАП; в диапазоне давления до 400 кПа, что соответствует 8 вольтам,
она равна 0,12 кПа.
Рис. 4.9. Измерительная система F.Tatsuoka et. al (1989):
1 –
датчик силы; 2 – цилиндр давления; 3 – цилиндр двойного действия; 4 – бесA
контактный датчик перемещения; 5 – образец грунта; 6 – дифференциальный датчик
давления для измерения эффективных напряжений в камере; 7 – устройство измерения
изменения объема; 8 – электропневматический клапан; 9 – реле давления; 10 – реA
гулировка сигнала реле; 11, 12, 13, 14 – регуляторы давления; 15 – от источника давления
воздуха; 16 – микрокомпьютер (PC9801) с блоком АЦП и ЦАП; 17,18,19,20 – через
усилитель аналоговых сигналов к микрокомпьютеру; 21, 22 – исполнительный аналоговый
сигнал от микрокомпьютера; 23 – контролируемое давление в камере; 24 – обратное
давление; 25 – реверсивный двигатель; 26 – блок управления двигателем
Глава 4
160
Алгоритм управления стабилометром с автоматическим контролем выA
бранной траектории напряжений приведен на рис. 4.10. На данной диаграмме
напряжения на текущей ступени обозначены индексом «0». Это среднее
эффективное напряжение
()
32
310
σ
′
+σ
′
=
′
p
и девиатор напряжения
310
σ−σ=q .
На следующей ступени (индекс «1») измеренные значения обозначены как
m
p
и dqqq
o
+=
1
. Заданным значением p на ступени 1 является
1
p . Для того чтобы
выдержать заданную траекторию напряжений,
1
p принимается равным:
dqAApp
o
×+=
1
,
где
AA
– тангенс угла наклона траектории напряжений в плоскости
p
q
−
,
показанной на рис. 4.10. Таким образом, для данных значений
1
p и
m
p
значение р должно быть увеличено на величину
m
ppp −=Δ
1
. В процессе
управления траекторией напряжений регулируется только боковое давление в
камере стабилометра. В течение изменения бокового давления
c
σΔ осевая
нагрузка измеряется датчиком силы и изменяется на величину
W
Δ
. Таким
образом, девиатор напряжений изменяется на величину
s
AW /Δ (
s
A –
площадь поперечного сечения образца). Соответствующее изменение в
среднем главном напряжении будет
sc
AW 3/Δ+σΔ . Это значение должно
быть равно
s
AWAAp /Δ+Δ , чтобы текущее напряжение после регулирования
давления в камере оставалось на намеченной траектории напряжений.
Следовательно, давление в камере должно быть изменено на величину
(1/3)/
cs
p
AA W AΔσ = Δ + − Δ
Однако точное значение
WΔ
неизвестно перед
регулированием
c
σ
. Опыты показывют, что при контроле давления в камере
малыми приращениями осевой деформации
4
(9 10 %)
−
⋅
может быть достигнут
очень удовлетворительный контроль траектории напряжений, даже когда
c
σΔ
принимается равным
pΔ
. Для следующего шага нагружения значения
0
p и
0
q переопределяются как
10
pp = и
10
qq = (
1
p и
1
q – намеченные значения на
предыдущей ступени), чтобы напряжение, обозначенное как «0», всегда
оставалось на заданной траектории напряжений.