Болдырев Г.Г. Методы определения механических свойств грунтов
Подождите немного. Документ загружается.

Механические испытания грунтов
131
Траектории напряжений, наиболее часто используемые при испытании
грунтов в условиях осесимметричного деформирования, показаны на рис. 3.8.
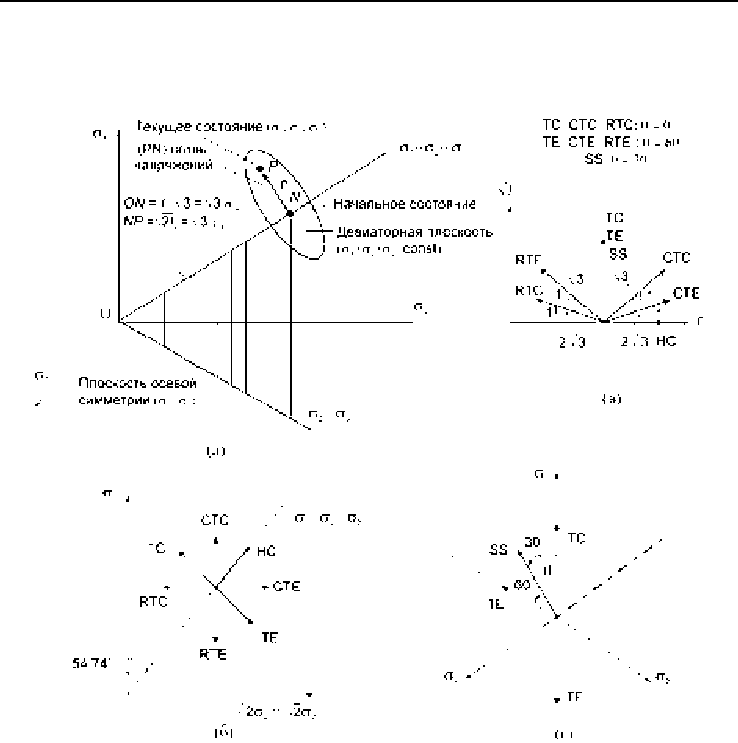
Рис. 3.8. Траектории напряжений (Chen, 1994):
а – в пространстве главных напряжений; б – в плоскости осесимметричной деформации; в
–
в меридианной плоскости; г – в октаэдрической (девиаторной) плоскости
На рис. 3.8, а, б показана плоскость трехосных (стабилометрических)
испытаний, в которой
123
σ>σ=σ. В этой плоскости находится
пространственная диагональ, на которой выполняется условие гидроA
статического сжатия (
123
σ=σ=σ); здесь же показана октаэдрическая
плоскость или плоскость девиаторного нагружения (в случае стабилоA
метрических испытаний), перпендикулярная оси гидростатического сжатия.
На рис. 3.8, в показаны траектории напряжений на плоскости первого
()I
и

Глава 3
132
второго инвариантов напряжений (I
2
), когда
constθ=
, а на рис. 3.8, г –
траектории напряжений в октаэдрической плоскости
123
сonst.σ+σ+σ =
В общем случае простого нагружения в девиаторной плоскости (рис. 3.8,
а) главные напряжения изменяются независимо (
123
σ≠σ≠σ), но отношение
между приращениями добавленных напряжений
123
//Δσ Δσ Δσ остается
постоянным в процессе нагружения. Это характеризуется постоянством угла
наклона траектории напряжений (рис. 3.8, б, в, г).
Испытание образцов грунта в стабилометре можно провести, используя
следующие траектории напряжений:
–
гидростатическое сжатие (НС);
–
сжатие при возрастании
1
σ
и
23
constσ=σ=
(СТС);
–
сжатие при
1
constσ= и уменьшении
23
σ=σ (RTC);
–
сжатие при постоянном среднем напряжении
123
сonst
3
σ+σ+σ
=
(ТС);
–
расширение при возрастании
23
σ=σ
1
сonstσ= (СТE);
–
расширение при
23
constσ=σ= и уменьшении
1
σ (RTE);
–
расширение при постоянном среднем напряжении
123
сonst
3
σ+σ+σ
=
(
ТE).
Ниже приведены траектории напряжений, классифицированные в работе
Chen and Saleb (1994).
Траектория гидростатического сжатия (НС)
Данная траектория соответствует такому пути нагружения образца грунта,
при котором
123
σ=σ=σ (отрезок ON на рис. 3.8, а). При таком нагружении
инварианты напряжений определяются следующим образом:
1октс
33IΔ=Δσ =Δσ, Δ=Δτ =
2 окт
0I , (3.1)
где
с
Δσ – приращение гидростатического, или среднего, напряжения
(
123с
Δσ = Δσ = Δσ = Δσ
).
Траектория стандартного трехосного сжатия (СТС)
В опытах с цилиндрическими сплошными (осевая симметрия) образцами
боковые напряжения остаются постоянными
23с
σ=σ=σ, в то время как
главное напряжение
1
σ
возрастает. Траектория напряжений, соответстA
вующая данным условиям изменения главных напряжений, показана на рис.
3.8,
б,в в плоскости осевой симметрии и меридианной плоскости,
соответственно. При таком нагружении
1
σ является наибольшим главным
Механические испытания грунтов
133
напряжением,
2
σ – промежуточным, а
3
σ – наименьшим главным напряA
жением. Приращения октаэдрического нормального и касательного
напряжений определяются из выражений:
11
окт
33
IΔΔσ
Δσ = =
;
Δτ = = Δσ
окт 21
22
33
I
. (3.2)
Наклон траектории напряжений в меридианной плоскости определяется
отношением
21
/
1/ 3JIΔΔ=
(см.рис. 3.8, в). В плоскости осевой симметрии
траектория напряжений параллельна оси главного наибольшего напряжения
1
σ . Эта траектория напряжений рекомендована ГОСТ 12248A96 и является
основной при испытании грунтов, выполняемом с целью определения
параметров их прочности и деформируемости.
Траектория нестандартного трехосного сжатия (RTC)
В этих испытаниях
1
σ остается постоянным, в то время, как
2
σ и
3
σ
уменьшаются равным образом. В результате
1
σ является наибольшим главA
ным напряжением. Октаэдрические напряжения определяются из выражения
(3.2),
при этом нормальное октаэдрическое напряжение уменьшается, а
касательное октаэдрическое напряжение увеличивается.
Траектория стандартного трехосного расширения (СТЕ)
В этом испытании наибольшее главное напряжение
1
σ остается
постоянным, а
2
σ и
3
σ увеличиваются равным образом. Приращения
октаэдрического нормального и касательного напряжений определяются из
выражений
12
окт
2
33
IΔΔσ
Δσ = =
;
окт 2 2
22
33
JΔτ = = Δσ
. (3.3)
Наклон траектории напряжений в меридианной плоскости (см.рис. 3.8, в)
определяется как
21
/
1/2 3JIΔΔ=
. В плоскости осевой симметрии
траектория напряжений перпендикулярна оси наибольшего главного
напряжения σ
1
(см.рис. 3.8, б).
Траектория нестандартного трехосного расширения (RTE)
После гидростатического сжатия на ступенях девиаторного нагружения
образца грунта главные напряжения
23
σ=σ
сохраняются постоянными, а
главное напряжение
1
σ
уменьшается. В этом случае
2
σ
и
3
σ
являются
соответственно наибольшим и промежуточным главными напряжениями, а
1
σ – наименьшим главным напряжением. Траектория напряжений, соA
Глава 3
134
ответствующая данному типу испытаний, показана на рис. 3.8, б,в. В отличие
от траектории напряжений СТЕ в данном случае нормальное октаэдрическое
напряжение уменьшается, а касательное октаэдрическое напряжение
увеличивается.
Траектория трехосного сжатия (ТС) и трехосного расширения (ТЕ)
В каждом из этих испытаний приращения напряжений
123
,,Δσ Δσ Δσ
прикладываются таким образом, чтобы сумма
123
()σ+σ +σ в процессе
нагружения образца грунта оставалась постоянной, равной начальному
значению 3
с
σ . По ГОСТ 12248A96 подобные испытания классифицированы
как испытания при постоянном среднем напряжении в образце грунта. Для
траектории трехосного сжатия (ТС) это условие удовлетворяется тогда, когда
1
σ увеличивается на
1
Δσ , в то время как
2
σ и
3
σ уменьшаются таким образом,
чтобы
23 1
1/2Δσ = Δσ = − Δσ . При этом всегда будет выполняться условие
123
0Δσ + Δσ + Δσ = . При нагружении по траектории трехосного расширения
(
ТР)
1
σ уменьшается на
1
Δσ , в то время как
2
σ и
3
σ увеличиваются таким
образом, чтобы
23 1
1/2Δσ = Δσ = Δσ . Инварианты октаэдрических напряжений
определяются как
окт
0Δσ = ,
окт 2 1
11
22
JΔτ = Δ = Δσ
. (3.4)
В ТСAиспытаниях
1
σ – наибольшее главное напряжение, а
2
σ и
3
σ – промежуточное и наименьшее главные напряжения. Как было показано
ранее в главе 2, инвариант напряжений
θ
используется для определения
направления траектории напряжений в девиаторной плоскости (рис. 3.8, г).
Для траектории ТС (
123
σ>σ=σ)
θ= °0
. Меридианная плоскость (плоскость,
проходящая через гидростатическую ось под углом
constθ=
) в этом случае
при 0θ= ° является меридианной плоскостью сжатия. Плоскость меридиA
анного сжатия (
0θ= °
) включает траектории напряжений ТС, СТС и RTC.
Для траектории напряжений ТE
1
σ – наименьшее главное напряжение,
при подстановке
231
σ=σ>σ
и 60 .θ= ° Меридианная плоскость, соA
ответствующая
60θ= °
, называется плоскостью расширения (растяжения).
Эта плоскость включает траектории нагружения ТЕ, СТЕ и RTE.
Траектория чистого сдвига (SS)
После гидростатического сжатия на ступенях девиаторного нагружения
образца грунта окатэдрическое нормальное напряжение остается постоянA
ным, а одно из главных напряжений, например
2
σ
, сохраняется постоянным
Механические испытания грунтов
135
(
2
0Δσ = ), в то время как два других (
1
σ и
3
σ ) увеличиваются и уменьшаются
на одну и ту же величину соответственно так, чтобы
31
Δσ = −Δσ . Величина
октаэдрического касательного напряжения определяется из выражения
окт 2 1
22
33
JΔτ = Δ = Δσ
. (3.5)
Из уравнения (2.9) для траектории чистого сдвига получаем
30θ= °
.
Данная траектория нагружения не может быть реализована в стаA
билометре. Для этой цели используется прибор плоской деформации или
прибор истинного трехосного сжатия.
Другие типы условий нагружения
Используя семейство приборов трехосного сжатия, в дополнение к
рассмотренным траекториям напряжений можно реализовать и иные условия
испытаний образцов грунтов (рис. 3.9). В частности, при исследовании
эффекта влияния главного промежуточного напряжения
2
σ на напряженноA
деформированное поведение грунтов проводятся испытания при значениях
σ
2
, отличных от
1
σ и
3
σ . Положение
2
σ по отношению к
1
σ и
3
σ
определяется из выражения
23
13
b
σ−σ
=
σ−σ
. (3.6)
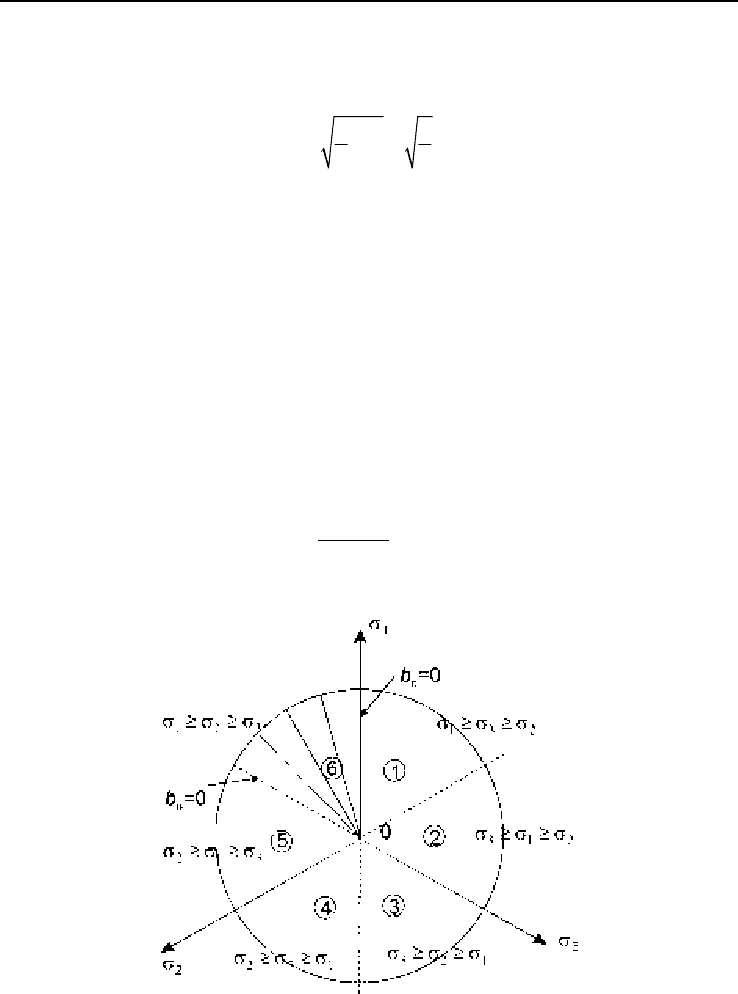
Рис. 3.9. Траектории напряжений в октаэдрической плоскости
Глава 3
136
Параметр
b
называется параметром вида напряженного состояния.
Для сохранения линейной траектории напряжений в любом выбранном
секторе октаэдрической плоскости, приращения главных напряжений
должны выбираться соответственно значения параметра вида напряженного
состояния
n
b , где
n
изменяется от 1 до 6, как показано в табл. 3.11.
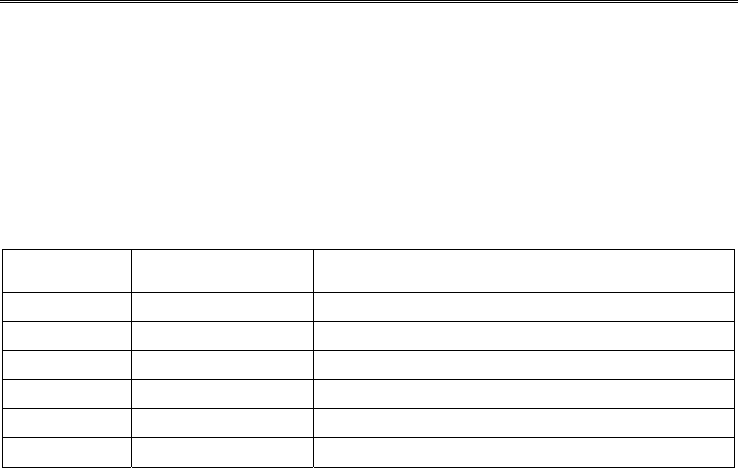
Таблица 3.11
Значения параметра вида напряженного состояния
Номер
квадранта
b
Значение
b
1
1
b
32 12
()/()σ−σ σ−σ
2
2
b
12 32
()/()σ−σ σ−σ
3
3
b
21 31
()/()σ−σ σ−σ
4
4
b
31 21
()/()σ−σ σ−σ
5
5
b
13 23
()/()σ−σ σ−σ
6
6
b
23 13
()/()σ−σ σ−σ
Например, если выбран сектор 6 (см.рис. 3.9), то соотношение между
приращениями напряжений должно приниматься при выполнении условия
62313
()/()b =σ−σ σ−σ . Для
6
0b = испытания будут проведены как для условий
нагружения по траектории стандартного трехосного сжатия (СТС), когда
123
σ>σ=σ и проекция траектории напряжений совпадает с положительным
направлением оси
1
σ
. Для
6
1b =
испытания проводятся при условии
123
σ=σ>σ, и проекция траектории напряжений проходит вдоль отрицаA
тельной оси
3
σ . Для нагружения вдоль других линейных траекторий напряA
жений в секторе 6 значения
6
b изменяются от 0 до 1. Для случая стандартного
трехосного расширения, когда
321
σ=σ>σ
, проекция траектории напряжений
направлена вдоль отрицательной оси
1
σ .
Для того чтобы построить траекторию напряжений с учетом эффективных
напряжений, необходимо из полных напряжений вычесть величину порового
давления. Известно, что при недренированном сжатии (рис. 3.10) траектория
полных напряжений параллельна оси вертикальных напряжений; поэтому
для отображения траектории эффективных напряжений, например, в точке d
необходимо провести линию через эту точку, параллельную оси гидроA
статического сжатия, найти эффективное напряжение
11d
u
′
σ=σ−
, точку е и
провести через нее горизонтальную прямую до пересечения с прямой dc.
Точка с будет находиться на траектории эффективных напряжений. АналоA
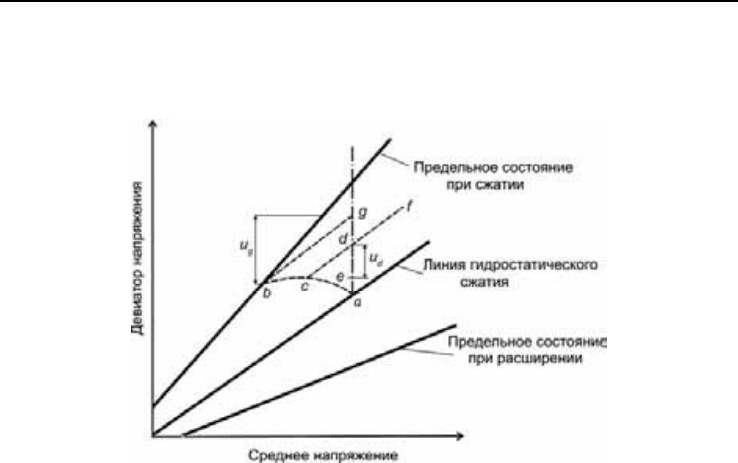
Механические испытания грунтов
137
гично выполняются действия и для отображения траектории эффективных
напряжений в точке q.
Рис. 3.10. Траектория напряжений с учетом порового давления
Испытания по различным траекториям напряжений
Стандартные дренированные трехосные испытания при сжатии образцов
грунта обычно проводят с использованием метода контролируемой траекA
тории напряжений, принимая неизмененным приращение боковых
напряжений
3
0.dσ=
Наоборот, если выполняют стандартные недрениA
рованные трехосные испытания с контролем траектории деформации, то
изменение объема отсутствует 0
v
dε= и
13
2ddε=− ε. При недренированном
нагружении эффективную траекторию напряжений определить невозможно
вследствие отсутствия изменения объема образца грунта, но можно
проконтролировать деформацию, выполнив условие
13
2ddε=− ε
, при этом
0
v
dε= . Исследования, выполненные рядом авторов (Nakamura et al., 1987;
Chu et al., 1992; Uchida and Vaid, 1994)
показывают, что метод контроля
траектории деформаций дает более однородные напряжения и деформации в
образце грунта, по сравнению с методом контроля траектории напряжений. В
испытаниях с контролем траектории деформации плотных песчаных
образцов практически отсутствует эффект локализации деформаций в виде
полос сдвига (Chu et al., 1992).

Глава 3
138
Нагружение образцов выполняют через их границу, штампами, приA
кладывая приращения напряжения (сила) или деформации (перемещение)
или применяя комбинацию обеих. Контроль нагрузки (напряжение) на
границе не подходит в случае, если исследуются мягкие грунты (например,
текучая глина, ил, рыхлый песок и т.п.). Контроль перемещения нагрузочного
штампа (например, двигатель с постоянной скоростью) необходим в случае,
если исследуется пиковая и остаточная прочность грунтов. Эта ситуация
встречается в задачах по определению текучести песка, при испытании
плотных песчаных грунтов и переуплотненных глин. Полностью
водонасыщенные пески ведут себя в условиях недренированного нагружения
как дренированные в течение и после землетрясения. Испытания песка (Vaid
and Eliadorani, 1998)
с контролем деформаций в условиях недренированного
нагружения, показывают вначале расширение, а затем наблюдается
деформирование с разупрочнением, если возможно некоторое дренирование
(
0
v
dε≠ ). Подобная ситуация может иметь место в массиве песчаного грунта с
высокой проницаемостью. Изучение поведения грунта, в котором моделиA
руется изменение степени дренирования и, следовательно, направление
приращения эффективных главных напряжений
()
0,0 ≠σ
′
≠ε dd
v
, позволяет
выявить особенности поведения песка при недренированноAдренированном
поведении. Использование метода нагружения с контролем траектории
деформации позволяет исследовать поведение грунта в более широком диапаA
зоне условий нагружения по сравнению с методом контроля напряжений.
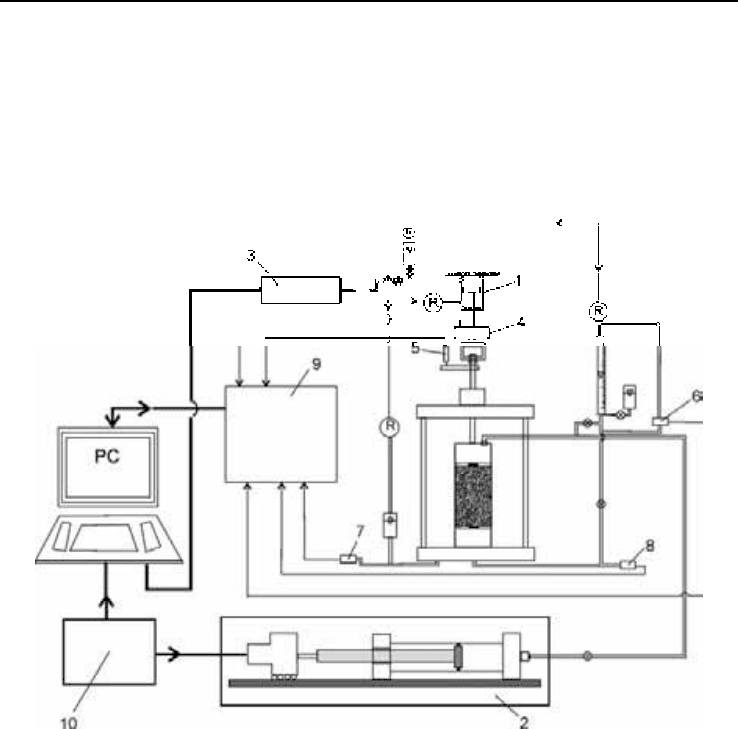
Схема прибора трехосного сжатия (стабилометра), способная реализовать
условия нагружения по траектории напряжений и деформаций, показана на
рис. 3.11. Она очень похожа на схемы стандартных приборов с контролем
скорости осевого перемещения, только сервопривод заменен цилиндром
двойного действия, заполненным водой, и добавлено устройство для
контроля объемной деформации. Устройство контроля объемной дефорA
мации включает цифровой контроллер давления, cвязанный с компьютером.
Принцип работы контроллера был описан ранее Menzies (1988).
Цифровой сигнал от микропроцессора управляет работой шагового двигаA
теля, который связан через редуктор с поршнем и, перемещая его, создает
давление и напор в жидкости, находящейся внутри образца грунта. Величина
изменения объема контролируется количеством шагов шагового двигателя.
Разрешение контроллера конструкции Menzies (1988) составляет 0,0016 см
3
.
Это соответствует разрешению в объемной деформации 4,0×10
A6
для образцов
диаметром 63 мм и высотой 126 мм. Выход контроллера связан с линией
дренажа, краном и датчиком порового давления, расположенными в осноA
вании стабилометра. Для уменьшения трения между образцом и нагрузочным
штампом в качестве штампа используется полированный стальной диск с
отверстием диаметром 20 мм в центре, в которое для дренирования вставлен
пористый камень, перекрывающий только 10 % площади образца. ПрираA
Механические испытания грунтов
139
щение осевой деформации управляется вторым контроллером, соединенным
с цилиндром двойного действия. Разрешающая способность измерения осеA
вой деформации также порядка 4,0×10
A6
. Независимое параллельное
соединение верхнего объема цилиндра двойного действия и резервуара с
водой позволяет создавать в нем давление воздуха для начальной анизоA
тропной консолидации образца грунта.
Рис. 3.11. Система для трехосных испытаний (Vaid et al., 2001):
1 –
цилиндр двойного действия; 2 – контроллер изменения объема; 3 – контроллер
осевого усилия; 4 – датчик силы; 5 – датчик осевого перемещения; 6 – дифA
ференциальный датчик давления; 7 – датчик бокового давления; 8 – датчик порового
давления; 9 – блок усиления и преобразования сигналов с датчиков; 10 – микропроцессор
Испытания при кинематическом нагружении проводятся следующим
образом. Образец грунта консолидируется до заданных бытовых напряжений
1
σ и
3
σ . Затем боковое давление
3
σ сохраняется постоянным и образец
нагружается непрерывно с постоянной скоростью осевого перемещения.
Изменение объема образца измеряется контроллером, следуя заданной
траектории деформации с постоянной скоростью
1
/
v
ddεε.
Глава 3
140
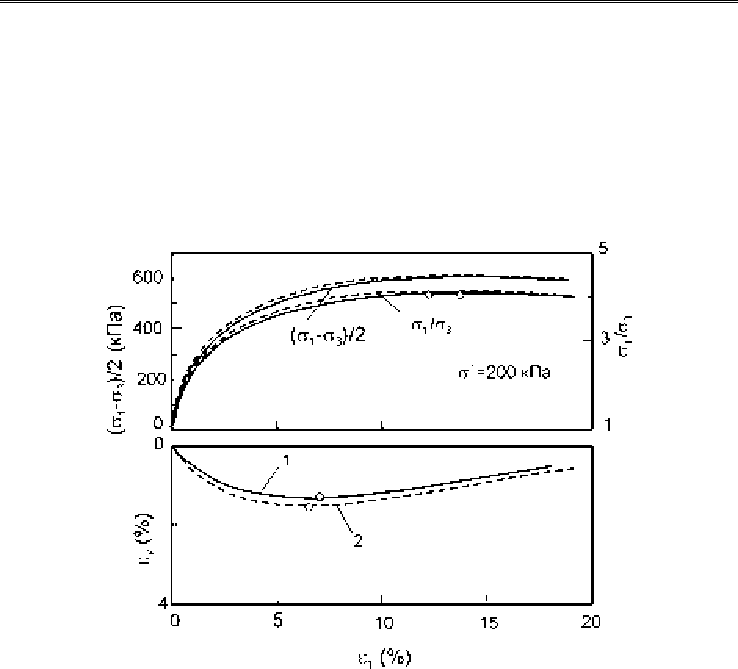
Результаты стандартных дренированных испытаний по траектории
стандартного трехосного сжатия приведены на рис. 3.12. Испытания с
контролем траектории деформации выполнялись с измерением изменения
объемной деформации в процессе нагружения образца постоянной скоростью
осевой деформации. Приращения изменения объемной деформации управA
лялись контроллером при постоянном обратном давлении. Сравнение
результатов показало (рис. 3.12), что они практически не зависят от условий
нагружения образца водонасыщенного песка.
Рис. 3.12. Результаты испытаний с контролем напряжений и деформации
(Vaid et al., 2001):
1 –
контроль напряжений; 2 – контроль деформации
3.6. Влияние граничных условий на результаты испытаний
Высота испытываемого образца оказывает существенное влияние на его
деформации при нагружении. В обзорной статье Read et al. (1984) показано
существенное влияние высоты образца и граничных условий на поверхности
контакта штамп – грунт на напряженноAдеформированное состояние
скальных пород, грунта и бетона.
На рис. 3.13 приведены результаты одноосных испытаний образцов
мрамора, при выполнении которых предполагалось, что площадь попеA
речного сечения образца не изменяется вплоть до разрушения, т.е.