Biringen S., Chow C.-Y. An Introduction to Computational Fluid Mechanics by Example
Подождите немного. Документ загружается.

272 NUMERICAL SOLUTION OF THE INCOMPRESSIBLE NAVIER-STOKES EQUATION
Writing (4.5.59)–(4.5.62) in matrix form, we obtain
A = G
⎡
⎢
⎢
⎣
−2110
1 −201
10−21
011−2
⎤
⎥
⎥
⎦
⎡
⎢
⎢
⎣
φ
11
φ
12
φ
21
φ
22
⎤
⎥
⎥
⎦
=
⎡
⎢
⎢
⎣
r
11
r
12
r
21
r
22
⎤
⎥
⎥
⎦
(4.5.68)
We can calculate the eigenvalues λ
1−4
of the coefficient matrix, A,usingthe
MATLAB function eig(A), which gives
λ
1
=−4.0, λ
2,3
=−4.0, λ
4
= 0.0 (4.5.69)
From (4.5.69), we observe that there is an eigenvalue whose value is zero; there-
fore, the matrix A is singular, cannot be inverted, and (4.5.68) does not have a
solution. We can now use the MATLAB function rcond(A), which calculates the
reciprocal of the condition number of matrix A based on the maximum column
sum of the matrix. If the output rcond(A) is close to zero, the input matrix A is
badly conditioned or singular. If the output is close to 1, then the input matrix is
well conditioned. For the A matrix in (4.5.68), the value of rcond is 1.39e
−17
,
confirming that the matrix is singular. Mitchell (1969, p. 121) shows that the sin-
gularity of the coefficient matrix of the Neumann problem in elliptic equations is
because the system of equations (4.5.62) is linearly dependent; i.e., the number
of independent equations is one less than the number of unknowns. Thus, one
remedy is to assign a value to one of the unknowns eliminating one variable so
that the number of linearly independent equations will be equal to the number
of remaining unknowns. In this context, let us assign an arbitrary constant value,
φ
11
= 0. Then the remaining equations can be solved in terms of this constant.
In this case, the matrix equation (4.5.68) becomes
A
1
1
= G
1
⎡
⎢
⎢
⎣
10 0 0
1 −20 1
10−21
01 1−2
⎤
⎥
⎥
⎦
⎡
⎢
⎢
⎣
φ
11
φ
12
φ
21
φ
22
⎤
⎥
⎥
⎦
=
⎡
⎢
⎢
⎣
0
r
12
r
21
r
22
⎤
⎥
⎥
⎦
(4.5.70)
Here, A
1
and G
1
are the modified coefficient matrix and the modified right-hand
side vector, respectively. The eigenvalues of A
1
are
λ
1
=−0.5858, λ
2
=−3.4142, λ
3
=−2.0, (4.5.71)
All the eigenvalues are nonzero; therefore, equations (4.5.65) will have a unique
solution for given values of the right-hand side vector. However, the condition
number of the coefficient matrix A
1
is 0.1250 so the system is linearly indepen-
dent but still ill-conditioned. Consequently, iterative solutions of this system will
be slower to converge than with Dirichlet-type boundary conditions. Because
PRIMITIVE VARIABLE FORMULATION: NUMERICAL INTEGRATION 273
of the slow convergence, for moderate-size problems, direct solutions based on
LU decomposition will be very efficient. This can be accomplished by using the
MATLAB operation = A
1
\ G
1
.
Projects for Further Study
1. Numerically integrate the incompressible the continuity equation (4.5.1)
and the Navier-Stokes equation (4.5.2) for a square cavity with a lid moving at a
velocity, U, to the right (Figure 4.5.9). Solve the problem for Reynolds numbers
Re = 100 and Re = 400. For this problem, Re = UL/ν,whereL is the cavity
height and ν is the kinematic viscosity of the fluid. You can incorporate one of
the following methods:
a. Crank-Nicolson (or Euler implicit), Adams-Bashforth (or Euler explicit)
semi-implicit scheme with the fractional step algorithm
b. Fully explicit Euler (or Adams-Bashforth) scheme with the fractional step
algorithm
As the mesh system, use the MAC staggered mesh arrangement. Note that for
the viscous terms the Euler implicit scheme can be written as
∂ζ
∂t
= ν
∂
2
ζ
∂x
2
ζ
n+1
i
−ζ
n
i
t
= ν
ζ
n+1
i+1
−2ζ
n+1
i
+ζ
n+1
i−1
x
2
+O(t, x
2
)
(4.5.72)
For the explicit portions of the time step, the diffusive and convective stability
criteria must be obeyed. Generally, the full Neumann boundary conditions of the
pressure equation will require a direct solver (see Section 4.6 for more on direct
solvers). At these values of Re, a 21 ×21 uniform mesh should be sufficient.
Plot the stream function and vorticity contours and compare the values of ψ
U
L
L
FIGURE 4.5.9 Schematic of the driven-cavity problem.

274 NUMERICAL SOLUTION OF THE INCOMPRESSIBLE NAVIER-STOKES EQUATION
and ω at the center of the primary vortex with published data (Ghia, Ghia, and
Shin, 1982; Kim and Moin, 1985). Because the Neumann problem for elliptic
equations is singular (one zero eigenvalue), we must set a reference value for the
pressure; say, on a boundary point set P = 0. This will eliminate one unknown
from the problem (and the related equation also has to be eliminated from the
system as explained in this section, so that the remaining equations will comprise
a linearly independent system of equations. The solution of the system will be
off by a constant, but the pressure gradient will be correctly calculated.
Assume steady state when the error in the solution is reduced by three orders
of magnitude from its initial value. We can use either the maximum magnitude
error norm or the Frobenius error norm for this purpose (Gerald and Wheatley,
1997, p. 156). For example, we define the error between successive iterates (or
time levels) and the corresponding error norms below:
f
n+1
i, j
= u
n+1
i+1/2, j
−u
n
i+1/2, j
F
∞
= max
1≤i≤M
N
j=1
|f
n+1
i, j
|=maximum magnitude norm (row sum) (4.5.73)
F
f
=
⎛
⎝
M
i=1
N
j=1
f
n+1
i, j
2
⎞
⎠
1/2
= Frobenius norm (Euclidean norm)
These quantities can be readily calculated by MATLAB basic commands norm(F,
inf) and norm(A, ‘fro’), respectively.
Calculate the stream function (ψ) and vorticity (ω) values at the pressure-node
points using the following equations:
ω =
∂v
∂x
−
∂u
∂y
ψ
ij
= ψ
i, j −1
+y(u
i, j −1/2
)
(4.5.74)
Note that ψ calculation requires an integration and the ψ equation above is the
discrete form for the staggered mesh. The integration can start from the lower wall
where ψ = 0 and continue along the vertical direction. To calculate u at pressure
nodes, averaging will be required. Assume ψ = 0 on all the solid boundaries.
In Program 4.3 the governing equations are numerically integrated for the
driven-cavity problem with the explicit Euler method; the divergence of the con-
verged velocity field was on the order of machine zero (about e-14). We note
that the flow is time dependent as it starts from a quiescent initial state when the
upper lid moves to the right, and it requires many iterations until the flow reaches
steady state. The solution efficiency can be significantly enhanced if the coeffi-
cient matrix of the linear system of the elliptic equations (either resulting from the
implicit time advancement of the viscous terms in the momentum equations, or
as in the present case resulting from the discretization of the “pressure” equation)
PRIMITIVE VARIABLE FORMULATION: NUMERICAL INTEGRATION 275
is declared as sparse; for example,
A = sparse(B)
returns the matrix B in compact form storing all nonzero elements together with
information for the location of each nonzero element in the matrix (row and
column numbers). Operations such as LU decomposition (backslash operation)
will be performed in sparse form if A isasparsematrix.
A more efficient way of accomplishing the same computational efficiency with
less storage will be to define the A matrix (the coefficient matrix of the linear
system),
A = sparse(L, L)
where L is the dimension of A. This statement defines a zero L ×L matrix
without allocating any storage. When the nonzero components of A are defined,
A is stored and returned in compact form.
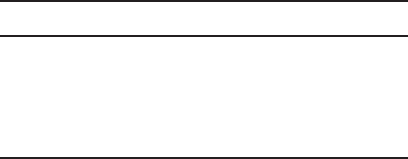
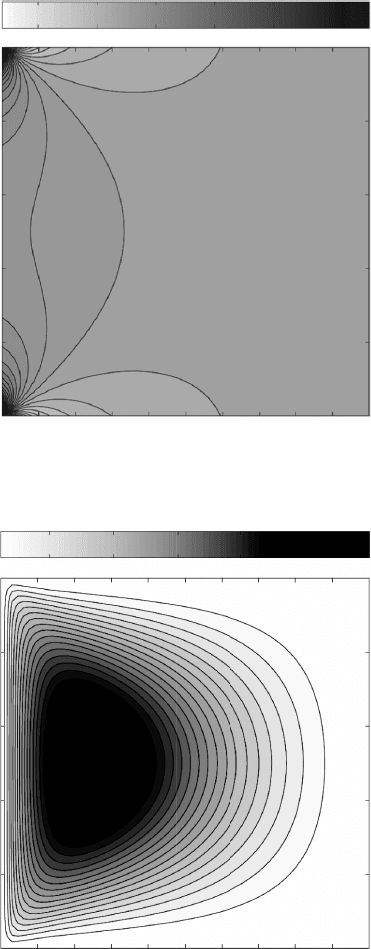
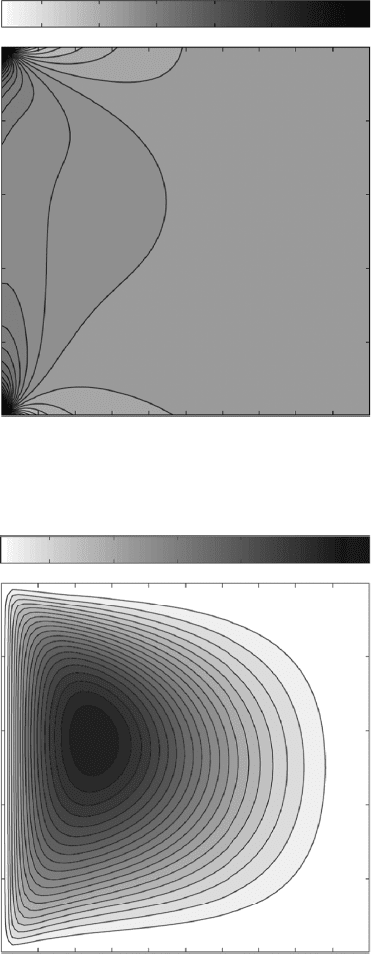
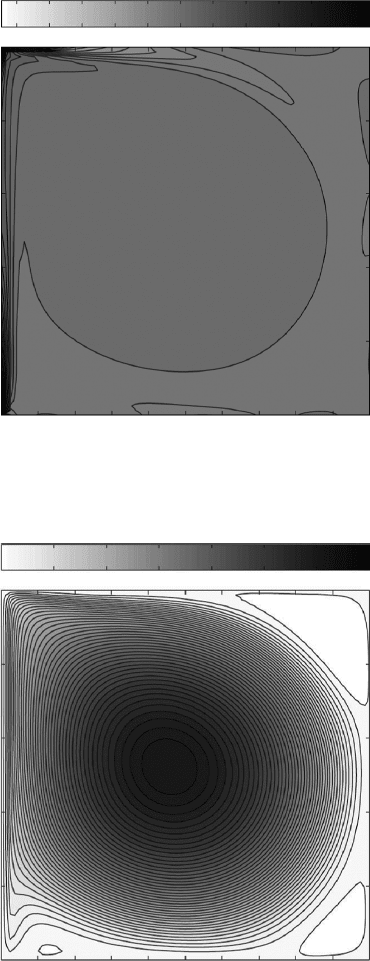
Solutions for the cavity problem for various Reynolds numbers are presented
in Fig. 4.5.10. For Re = 1, the solution has vertical symmetry, as displayed by
the stream function and vorticity contours, and the vorticity is concentrated close
to the upper corners where the problem is singular due to the double value
(0 and 1) of the u velocity at these locations. As the Re increases to Re = 100,
y symmetry is broken and the vortex center moves toward the right upper corner;
a substantial increase to Re = 4000 results in the formation of secondary vortices
in three corners of the cavity. Vorticity is concentrated on the upper and the right
walls, and a vorticity tongue extends deeply into the cavity from the right wall.
Table 4.5.1 summarizes vorticity and stream function values at the center of the
primary vortex for various Reynolds numbers. These values compare favorably
with previous work concerning this flow (see, e.g., Kim and Moin, 1985) for the
comparable number of grid points employed.
2. The shear-driven cavity flow is of interest because of its similarity to wind-
driven flows and can be useful to assess momentum transport from air to water
when the effect of waves on the interface is neglected. Let us assume that at
the air–water interface the shear stress τ = ρ
a
u
2
∗
is constant. The governing
equations (4.5.1) and (4.5.2) are nondimensionalized by the friction velocity u
∗
and the cavity height L,sothatRe= u
∗
L/ν. The physical constants used in
TABLE 4.5.1 Stream Function (ψ
c
) and Vorticity (ω
c
)
at the Center of the Primary Vortices; N
x
and N
y
Are
the Number of Grid Points along x and y Directions
Re ψ
c
ω
c
N
x
×N
y
1 −0.099 −3.207 65 ×65
100 −0.101 −3.157 65 ×65
400 −0.107 −2.609 65 ×65
1000 −0.113 −2.191 81 ×81
4000 −0.113 −1.842 81 ×81
0
0 0.2 0.4
Stream function contours
Vorticity contours
(a)
x x
0.6 0.8
−0.02
−80
−60
−40
−20
0
20
−0.04
−0.06
−0.08
−0.1
−0.12
1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y
y
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
FIGURE 4.5.10 Streamlines and vorticity contours for the driven cavity. (a) Re = 1, (b) Re = 100, (c) Re = 4000.
276
0
0 0.2 0.4
Stream function contours
Vorticity contours
0.6 0.8
−0.02
−80
−60
−40
−20
0
20
−0.04
−0.06
−0.08
−0.1
−0.12
1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y
y
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
(b)
x x
FIGURE 4.5.10 (continued)
277
0
0 0.2 0.4
Stream function contours
Vorticity contours
0.6 0.8
−0.02
−120
−100
−80
−60
−40
−20
0
20
40
60
80
−0.06
−0.04
−0.08
−0.1
−0.12
−0.14
1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
10
y
y
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
(
c
)
x x
FIGURE 4.5.10 (continued)
278

PRIMITIVE VARIABLE FORMULATION: NUMERICAL INTEGRATION 279
the problem are the kinematic viscosity of water ν = 10
−6
m
2
s
−1
, the density of
water ρ = 1000 kg m
−3
, and the density of air ρ
a
= 1kg m
−3
. The governing
equations are solved with the following boundary conditions:
At the air water interface (top wall moving from right to left):
∂u
∂y
=−
ρ
a
ρ
Re and v = 0
At the solid walls: u = v = 0
Calculate the resulting flow field for Re = 100 and for Re = 2000; plot the
stream function and vorticity contours for each value of Re. Also plot u-velocity
profiles as a function of the y coordinate at x = 0.5. Finally calculate the values of
ψ = ψ
max
−ψ
min
and compare your results with the published results of Huser
and Biringen (1992). For these steady-state calculations a 41 × 41 uniform mesh
should be adequate.
In summary, the integration of the two-dimensional, unsteady, incompressible
continuity and momentum equations on a rectangular, staggered grid arrange-
ment using the fractional step Euler explicit method can be accomplished by the
following procedure.
Step 1. Prediction step:
• Using (4.5.39) and (4.5.40), calculate ˆu and ˆv at their respective
grid point locations.
• Apply the boundary conditions as described by (4.5.43) or (4.5.44).
Generally, (4.5.43) will be sufficient as the computation sweeps
along the x and y directions.
• These equations will be solved algebraically because time
advancement is fully explicit. Quantities that are not evaluated
at their respective nodes will be evaluated by averaging, as in
(4.5.33)–(4.5.38).
• Linear stability conditions (4.5.41) and (4.5.42) must be obeyed;
in fact, because the equations are nonlinear, especially at higher
Reynolds numbers, these restrictions will have to be multiplied by
a safety factor on the order of 10
−1
and even smaller.
• Divergence of the velocity field must be calculated at every time
step, using the velocity field at the advanced time level, (n + 1),
∇ · u =
u
n+1
i+1/2, j
−u
n+1
i−1/2, j
x
−
v
n+1
i, j +1/2
−u
n+1
i, j −1/2
y
(4.5.75)
The sum of the divergence magnitude at all grid points should be sat-
isfied to machine zero at each time step. If this quantity increases,
the calculation should be terminated and restarted with a smaller
time step.

280 NUMERICAL SOLUTION OF THE INCOMPRESSIBLE NAVIER-STOKES EQUATION
Step 2. Pressure calculation:
• Calculate the pressure form the pressure-Poisson equation (4.5.48),
P
n+1
i, j +1
−2P
n+1
i, j
+P
n+1
i, j −1
y
2
+
P
n+1
i+1, j
−2P
n+1
i, j
+P
n+1
i−1, j
x
2
=
1
t
ˆu
i+1/2, j
− ˆu
i−1/2, j
x
+
ˆv
i, j +1/2
− ˆv
i, j −1/2
y
(4.5.76)
A direct solver with LU decomposition can be used for the solution
of this equation. This is illustrated in greater in greater detail in
Section 4.6.
• Boundary condition applied to the pressure equation at all bound-
aries is the homogeneous Neumann boundary conditions (4.5.49)
and (4.5.50). This equation is solved at the pressure nodes (i, j)
(Fig. 4.5.3). Note that the Euler explicit time-advancement calcu-
lates the actual thermodynamic pressure (scaled by the constant
density) and not a pseudo-pressure.
• The Neumann problem for the elliptic pressure equation results in a
singular coefficient matrix. To remove this singularity (and obtain a
system of linearly independent equations), it is necessary to assign
a constant value (for example, P = 0) to the pressure at one pres-
sure node. The resulting solution will be off by a constant, but the
pressure gradient will be correctly calculated. A smoother solution
can be obtained by setting the average value of the solution vector
to zero and by imposing this condition in place of one of the nodal
equations.
Step 3. Velocity correction:
• Obtain the velocity field at the advanced time level (n + 1) from
(4.5.47); for each velocity component, this equation gives
u
n+1
i+1/2, j
= ˆu
i+1/2, j
−
t
x
P
n+1
i+1, j
−P
n+1
i, j
(4.5.77)
v
n+1
i, j +1/2
= ˆv
i, j +1/2
−
t
x
P
n+1
i, j +1
−P
n+1
i, j
(4.5.78)
• Steady-state solution at low Reynolds numbers should be assumed
converged when one of the error norms (4.5.73) will decrease by at
least three orders of magnitude.
4.6 FLOW PAST A CIRCULAR CYLINDER: AN EXAMPLE
FOR THE VORTICITY-STREAM FUNCTION FORMULATION
As we have seen in Section 4.3, an alternate formulation of the governing
equations for two-dimensional, steady and unsteady incompressible equations
is the vorticity-stream function formulation where pressure does not appear as
FLOW PAST A CIRCULAR CYLINDER 281
a dependent variable. We can obtain the vorticity transport equation from the
Navier-Stokes equation as follows. First we write the Navier-Stokes equation as
a vector equation:
∂V
∂t
+(V ·∇)V =−∇
p
ρ
+ν∇
2
V (4.6.1)
where V is the velocity vector, ν is the kinematic viscosity, p is thermodynamic
pressure, and ρ is the fluid density. Using vector identities for the convection
term, we obtain
(V ·∇)V = ∇
1
2
V ·V
−V × (∇ × V) (4.6.2)
Substitution of (4.6.2) into (4.6.1) yields
∂V
∂t
+∇
1
2
V ·V
−V ×(∇ × V) =−∇
p
ρ
+ν∇
2
V (4.6.3)
Defining the vorticity vector
ω = ∇ × V (4.6.4)
and noting that the scalar quantity (p/ρ)
∇ × ∇
p
ρ
= 0 (4.6.5)
then from vector identities we can write
V × (∇ ×V) = V × ω (4.6.6)
With (4.6.4)–(4.6.6), after taking the curl equation (4.6.3) becomes
∂ω
∂t
−∇ × (V × ω) = ν∇
2
ω (4.6.7)
Again, using vector identities, we obtain
∇ × (V ×ω) = V(∇ · ω) − ω(∇ · V) − (V ·∇)ω + (ω · ∇)V
∇ · ω = ∇ · (∇ ×V) = 0 (divergence of the curl of any vector is zero)
∇ · V = 0 (satisfies mass conservation for incompressible flow)
(ω ·∇)V = 0 (for two-dimensional flow)
(4.6.8)
The substitution of (4.6.8) into (4.6.7) results in
∂ω
∂t
+(V · ∇)ω = ν∇
2
ω (4.6.9)