Андреев Е.Б., Ключников А.И. и др. Автоматизация технологических процессов добычи и подготовки нефти и газа
Подождите немного. Документ загружается.

сигналов цифровой и аналоговой передачи данных. Устройство
индикации показывает значение измеряемого параметра.
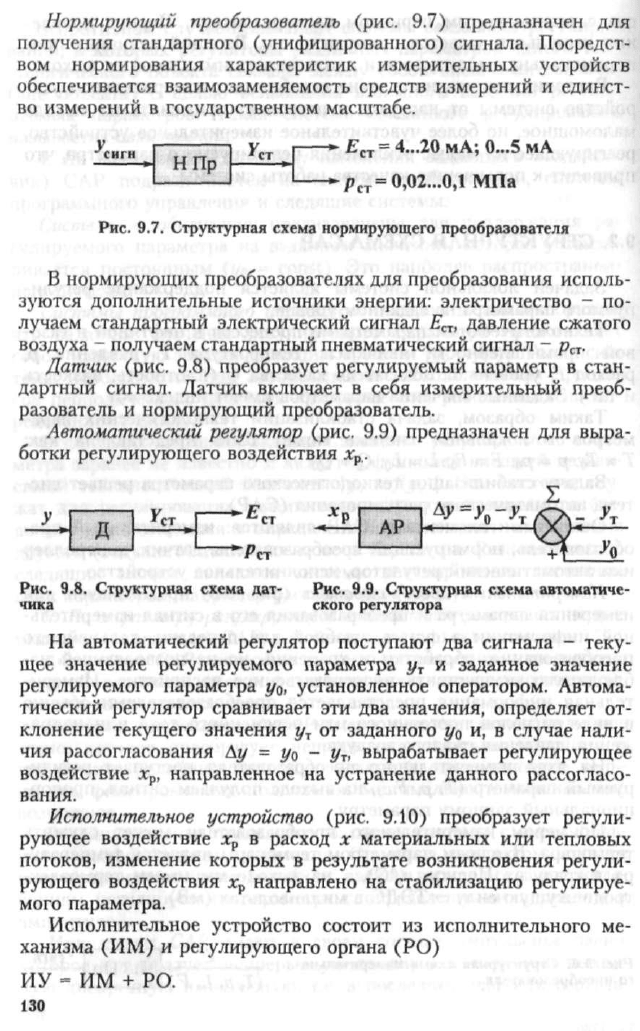
На рис. 8.10 показана блок-схема интеллектуального датчика
с выходным сигналом тока.
ПАП - цифро-аналоговый преобразователь - преобразует
цифровой код в сигнал тока датчика. Полевой транзистор слу-
жит для стабилизации напряжения питания схемы. Сопротивле-
ние Ri служит для контроля значения тока в цепи.
При создании нового поколения интеллектуальных датчиков
потребовалось наряду с передачей аналоговой информации пере-
давать и цифровые данные. С этой целью был разработан специ-
альный протокол Highway Addressable Remote Transducer - так
называемый HART-протокол.
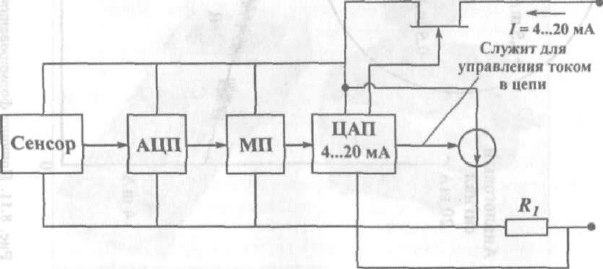
Передача данных в HART-протоколе осуществляется с
помощью частотной модуляции, в соответствии с широко рас-
пространенным стандартом Bell 202. Цифровая информация пе-
редаётся частотами 1200 Гц (логическая 1) и 2200 Гц (логиче-
ский 0), которые накладываются на аналоговый токовый сигнал
(рис. 8.11).
Частотно-модулированный сигнал цифровых данных при
применении соответствующей фильтрации не влияет на основ-
ной аналоговый сигнал 4...20 мА. Скорость передачи данных для
HART составляет 1,2 кбит/с.
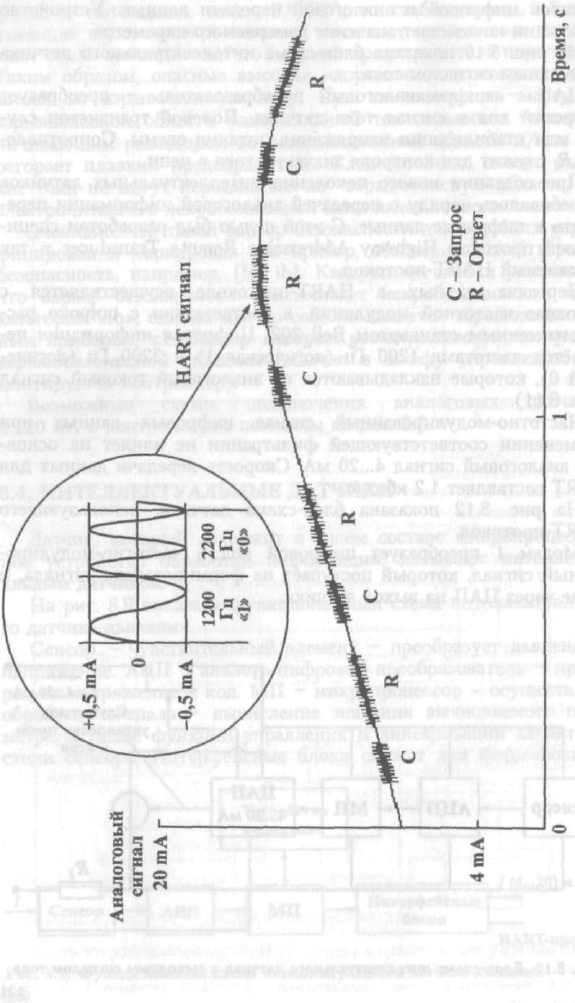
На рис. 8.12 показана блок-схема датчика, использующего
Н ART-протокол.
Модем 1 преобразует цифровой код в частотно-модулиро-
ванный сигнал, который поступает на формирователь сигнала, и
далее через ЦАП на выход датчика.
Рис. 8.10. Блок-схема интеллектуального датчика с выходным сигналом тока
121
я
ч
о
I
о
5с
I
U
1
о
а
а
о
•§•
а.
а
-«-»
оо
о
Рис. 8.12. Блок-схема датчика, использующего HART-протокол
Рис. 8.13. Внешний вид интеллектуального датчика давления с HART-комму-
никатором
Помимо передачи сигнала от датчика о величине давления на
датчик могут передаваться управляющие сигналы. С помощью
этих управляющих сигналов может быть осуществлена калиб-
ровка датчика. При этом модем 2 преобразует частотные посыл-
ки («1» «О») в цифровой код.
На рис. 8.13 показан внешний вид интеллектуального датчика
давления с HART-коммуникатором.
Глава 9
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
9.1. ПРИНЦИП ДЕЙСТВИЯ И КЛАССИФИКАЦИЯ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Технологические процессы, осуществляемые на предприятиях
нефтяной и газовой промышленности, обычно представляют в
виде динамических систем, поведение которых во времени опре-
деляется такими параметрами, как температура, давление, расход,
уровень, концентрация и др. При нормальном протекании про-
цесса эти параметры принимают определенные, так называемые
номинальные значения.
Указанные параметры могут отклоняться от номинальных
значений в силу ряда внешних причин (изменение расхода и со-
става сырья, параметров тепло- и хладагентов и др.) или явле-
ний, протекающих в самом аппарате (условий передачи тепла
через поверхность и др.). Это приводит к нарушению технологи-
ческого процесса и, как следствие, к снижению количества и ка-
чества получаемой продукции.
В связи с этим для нормального протекания процесса им не-
обходимо управлять.
Управление - это целенаправленное воздействие на техноло-
гический объект управления (ТОУ), которое обеспечивает его
функционирование и качественно оценивается величиной крите-
рия управления.
Критерии могут иметь технологическую или экономическую
природу (производительность технологической установки, себе-
стоимость продукции и т.п.).
Регулирование - частный случай управления, используемый в
локальных системах и означающий стабилизацию технологиче-
ского параметра, т.е. поддержание выходных параметров объекта
124
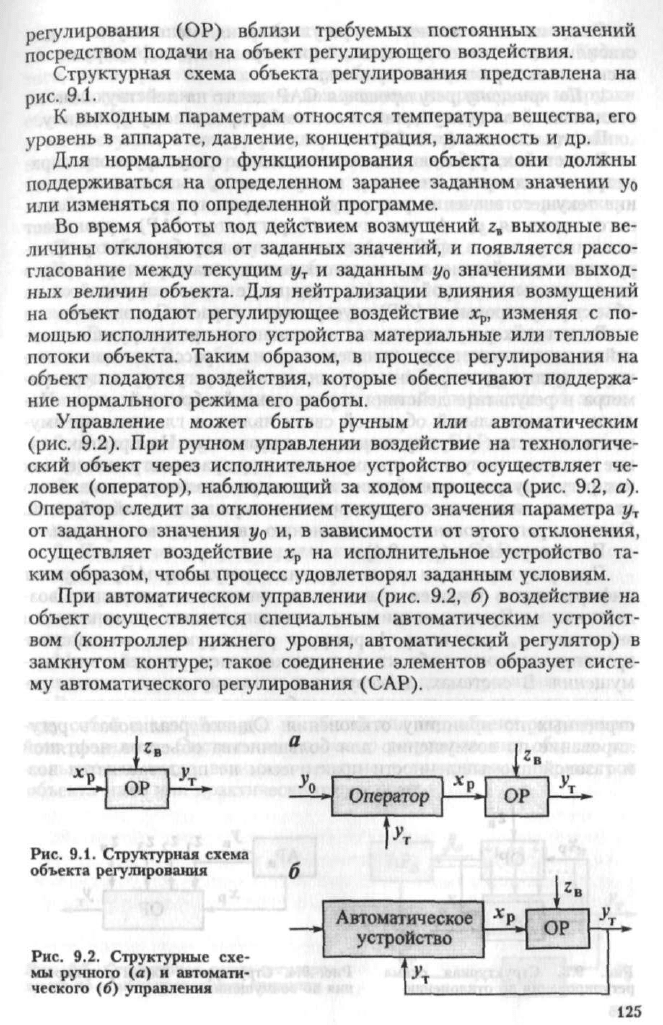
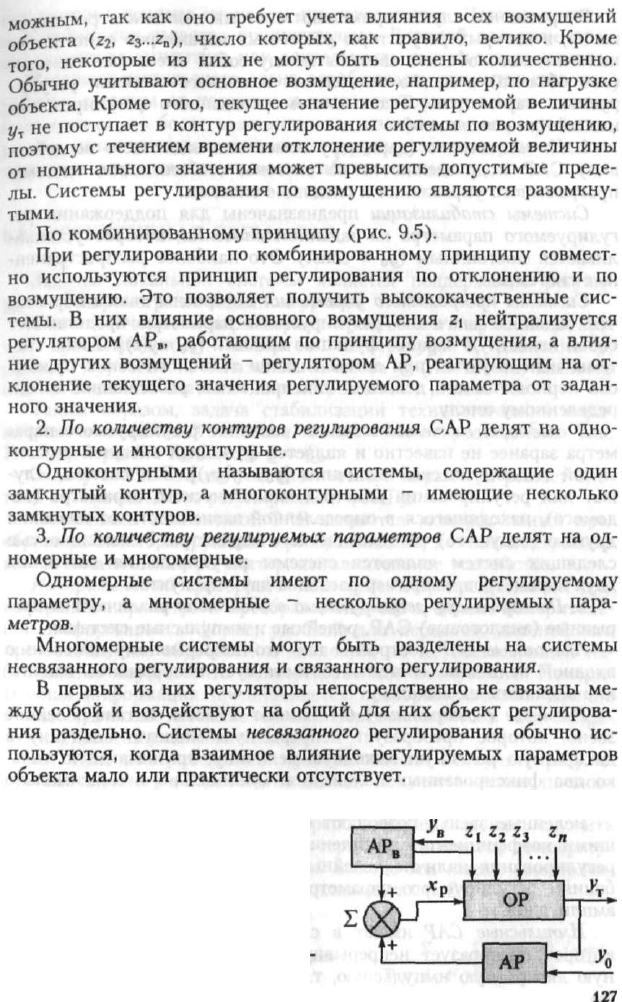
Рис. 9.5. Структурная схема регулиро-
вания по комбинированному принципу
В противном случае применяют системы связанного регулиро-
вания, в которых регуляторы различных параметров одного тех-
нологического объекта связаны между собой внешними связями
(вне объекта) с целью ослабления взаимного влияния регули-
руемых параметров. Такая система связанного регулирования
называется автономной.
4. По назначению (характеру изменения задающего воздейст-
вия) САР подразделяются на системы стабилизации, системы
программного управления и следящие системы.
Системы стабилизации предназначены для поддержания ре-
гулируемого параметра на заданном значении, которое устанав-
сов с определенным периодом их чередования. Период появле-
ния импульсов задается принудительно. Входной величине про-
порциональна амплитуда или длительность импульсов на выходе.
Введение импульсного звена освобождает измерительное уст-
ройство системы от нагрузки и позволяет применять на выходе
маломощное, но более чувствительное измерительное устройство,
реагирующее на малые отклонения регулируемого параметра, что
приводит к повышению качества работы системы.