Allen-Bredley/Rockwell.1756-PM001G. Руководство по эксплуатации. Общая методика для программируемых контроллеров Logix5000
Подождите немного. Документ загружается.

Управление многозадачным режимом 4-11
Publication 1756-PM001G-EN-P - March 2004
Программная проверка наличия перекрытий
При возникновении перекрытия контроллер:
• заносит неосновную ошибку в объект FAULTLOG
• сохраняет информацию о перекрытии в объекте TASK для
данной задачи
Для написания логики, проверяющей на наличие перекрытия,
используйте инструкцию Get System Value (GSV) для контроля одного
из следующих объектов:
Если вы хотите: То обратитесь к следующему объекту и атрибуту:
Объект: Атрибут: Тип
данных:
Описание:
определить, произошло ли
перекрытие для какой-
либо задачи
FAULTLOG MinorFaultBits DINT Отдельные биты, указывающие на неосновную ошибку
Чтобы определить, имеет ли
место следующее:
Проверьте этот бит:
Инструкция произвела
неосновную ошибку
4
Для какой-либо задачи
произошло перекрытие.
6
Последовательный порт
произвел неосновную ошибку
9
Батерея отсутствует или требует
замены
10
определить, произошло ли
перекрытие для
определенной задачи
TASK Status DINT Информация о состоянии задачи. Если контроллер
установит один из следующих битов, вы должны
вручную сбросить соответствующий бит.
Чтобы определить, имеет ли
место следующее:
Проверьте этот бит:
Инструкция EVENT запустила
задачу (только для событийных
задач).
0
Задача запустилась по тайм-
ауту (только для событийных
задач).
1
Для данной задачи произошло
перекрытие.
2
определить, сколько раз
произошло перекрытие
TASK OverlapCount DINT Действует для событийной или периодической задачи.
Для сброса счетчика установите этот атрибут на 0.

4- 12 Управление многозадачным режимом
Publication 1756-PM001G-EN-P - March 2004
Программная проверка наличия перекрытий
1. Инструкция GSV устанавливает атрибут Task_2_Status =Status (Состояние) для задачи
Task_2 (значение DINT).
2. Если Task_2_Status.2 = 1, то произошло перекрытие, и следует получить значение счетчика
перекрытий:
Инструкция GSV устанавливает атрибут Task_2_Overlap_Count (тег DINT) = OverlapCount
(Счетчик перекрытий) задачи Task_2.
3. Если Condition_1 = 1, то необходимо сбросить биты атрибута Status для задачи Task_2.
Инструкция SSV устанавливает атрибут Status задачи Task_2 = Zero. Zero – это тег DINT,
имеющий значение 0.
ПРИМЕР
Управление многозадачным режимом 4-13
Publication 1756-PM001G-EN-P - March 2004
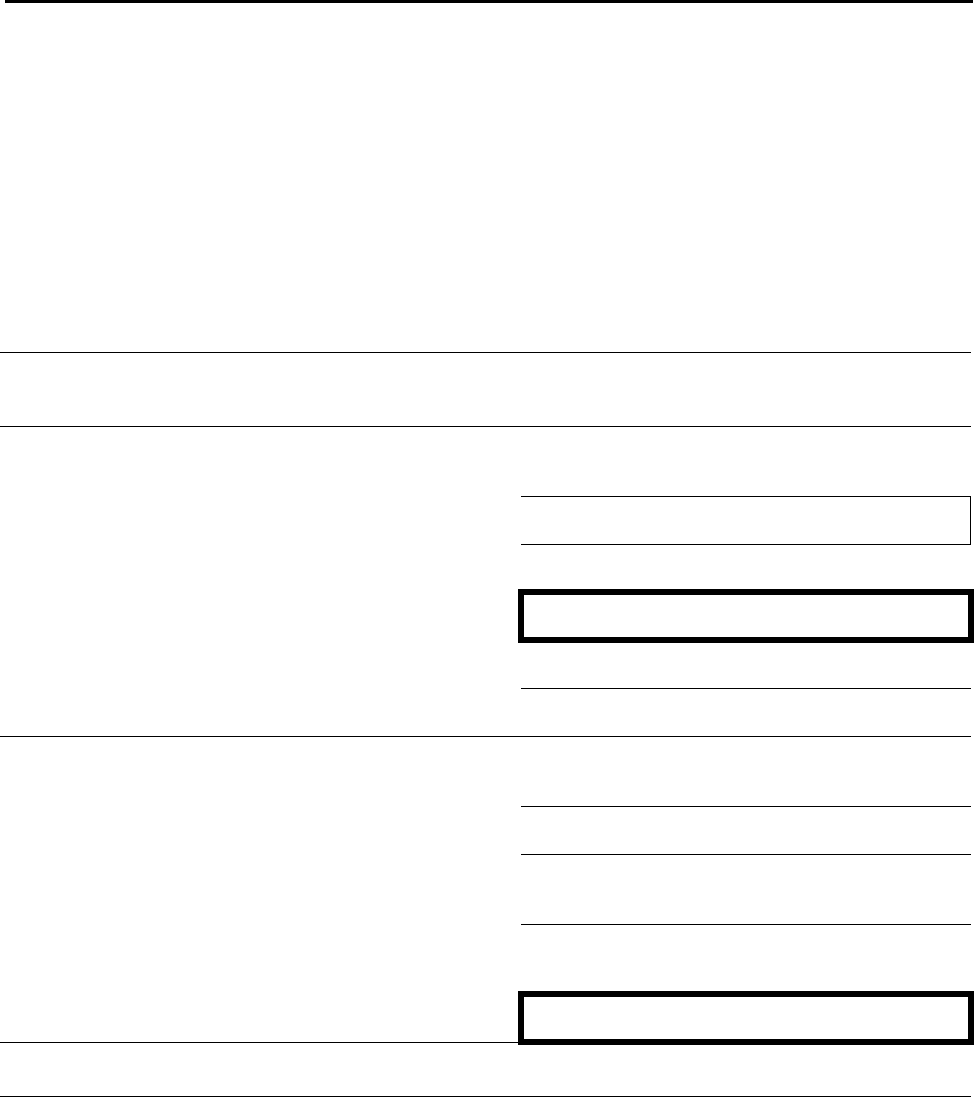
Конфигурирование
обработки вывода
для задачи
В конце выполнения задачи контроллер выполняет служебные
операции (обработку вывода) для модулей ввода/вывода в вашей
системе. Хотя это не то же самое, что обновление этих модулей, такая
обработка вывода может оказывать влияние на обновление модулей
ввода/вывода в вашей системе.
У вас есть возможность отключить эту обработку вывода для
определенной задачи, что уменьшает истекшее время выполнения
данной задачи.
Разрешите или запретите обработку
вывода в конце задачи
4- 14 Управление многозадачным режимом
Publication 1756-PM001G-EN-P - March 2004
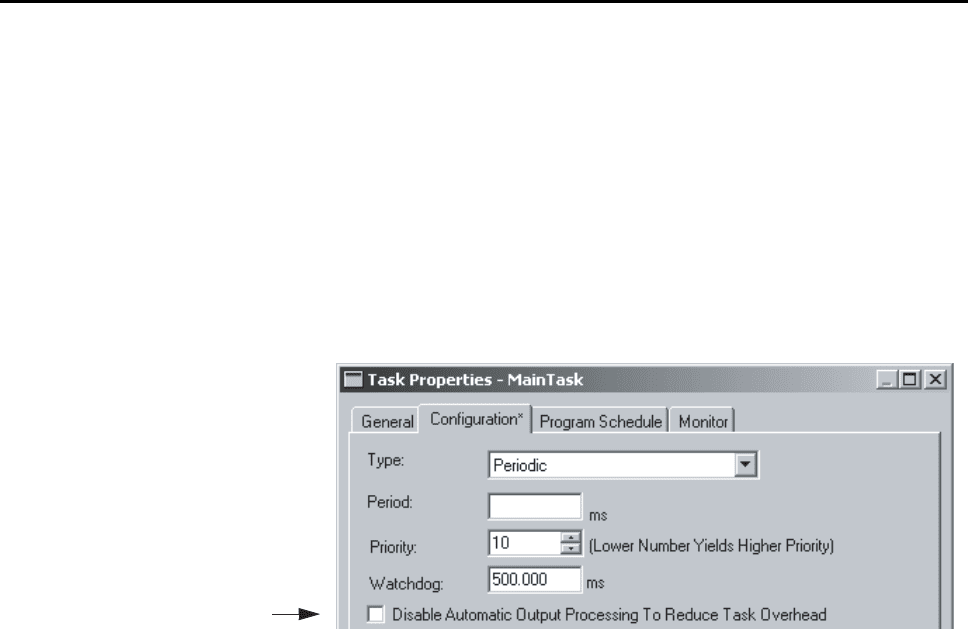
Чтобы выбрать настройку обработки вывода для задачи,
воспользуйтесь следующей блок+схемой
Рисунок 4.1 Выбор настройки обработки вывода для задачи.
Is this the only task in the Tasks folder of the
project?
0, 1, 2, or 3
B
B
C
B
A
На какое количество модулей вывода
влияет (записывает данные) эта задача ?
4 или более
Это единственная задача в папке Tasks
данного проекта?
Разрешите автоматическую
обработку вывода.
Да
Да
Да
Нет
Нет
Нет
Настроена ли какая-либо другая задача на
разрешение автоматической обработки вывода?
Выполняется ли задача, настроенная на
автоматическую обработку вывода,
часто/непрерывно?
Для данной блок-схемы задача выполняется
часто, если время ее интервала (истекшее
время между двумя триггерами) RPI для
модулей ввода/вывода в вашей системе
Настроена ли какая-либо другая задача на
разрешение автоматической обработки
вывода?
Для конфигурируемой вами задачи:
1. Запретите автоматическую обработку
вывода.
2. Используйте инструкцию IOT для
обновления всех модулей вывода, на
которые влияет данная задача
Управление многозадачным режимом 4-15
Publication 1756-PM001G-EN-P - March 2004
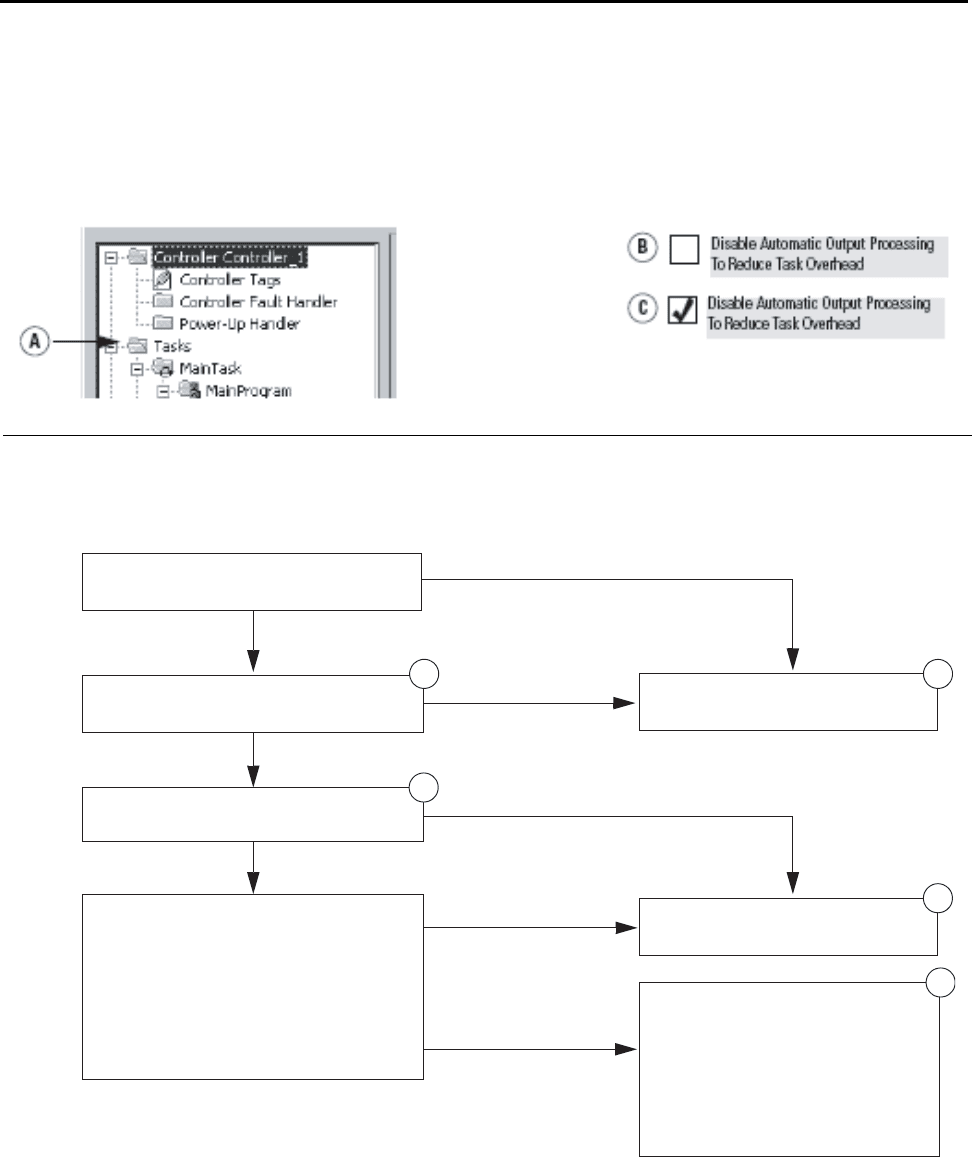
Ручное конфигурирование обработки вывода
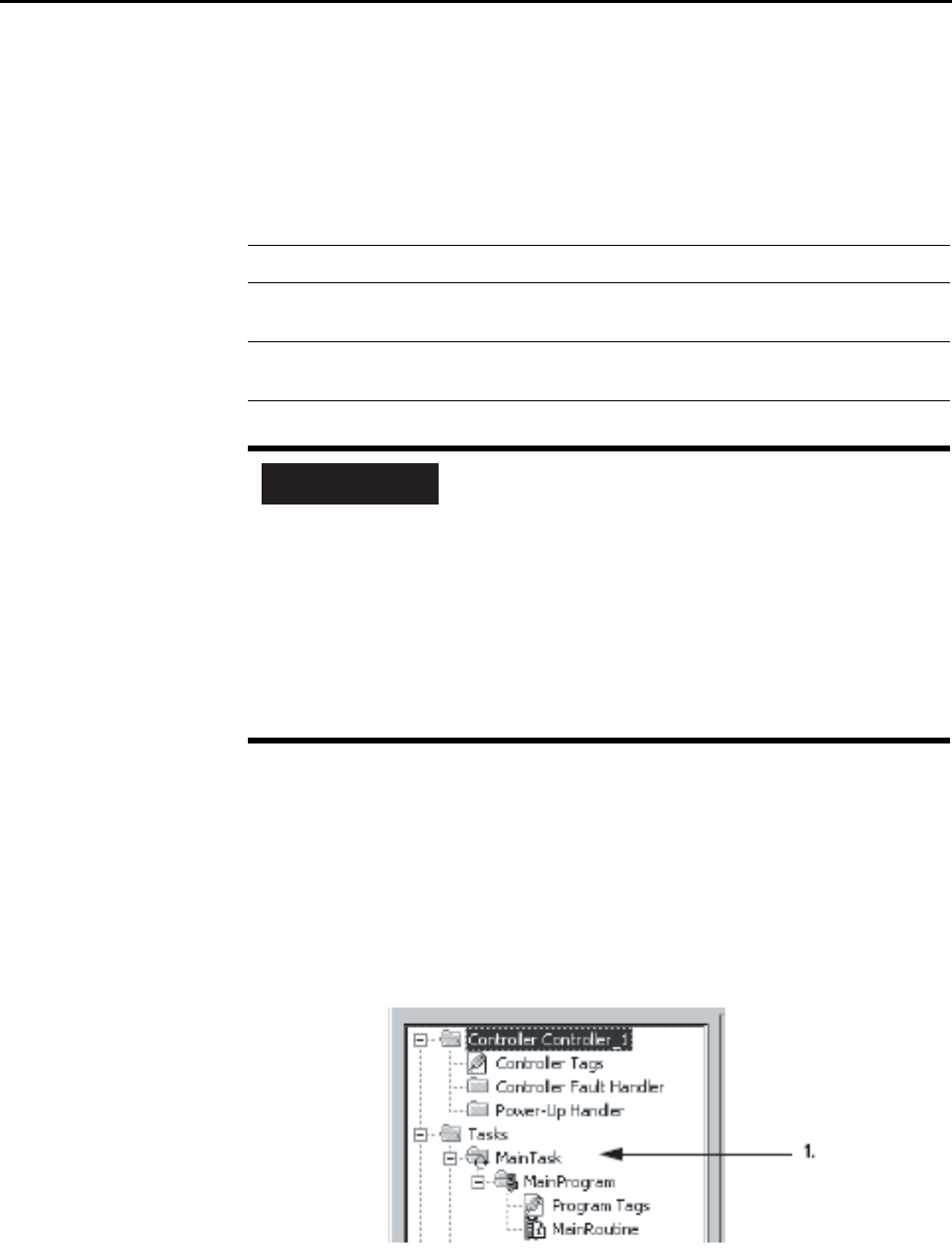
1. В организаторе контроллера щелкните правой кнопкой мыши
по соответствующей задаче и выберите Properties (Свойства).
2. Щелкните по закладке Configuration (Конфигурация).
3. Сконфигурируйте обработку вывода для данной задачи:
4. Нажмите
Если вы хотите: То:
разрешить обработку вывода в конце
выполнения задачи
Снимите флажок Disable Automatic Output Processing To Reduce Task
Overhead (Запрещение автоматической обработки вывода для
уменьшения служебных операций задачи) (настройка по умолчанию).
запретить обработку вывода в конце
выполнения задачи
Установите флажок Disable Automatic Output Processing To Reduce Task
Overhead.

4- 16 Управление многозадачным режимом
Publication 1756-PM001G-EN-P - March 2004
Программное конфигурирование обработки вывода
Чтобы написать логику для конфигурирования обработки вывода для
какой+либо задачи, используйте инструкцию Set System Value (SSV).
Обращайтесь к следующему атрибуту объекта TASK для данной
задачи:
Если вы
хотите:
То обратитесь к
этому атрибуту:
Тип
данных:
Инструкция: Описание:
разрешить или
запретить
DisableUpdateOutputs DINT GSV Чтобы: Установите этот
атрибут на:
обработку
вывода в конце
выполнения
задачи
SSV разрешить обработку
вывода в конце
выполнения задачи
0
запретить обработку
вывода в конце
выполнения задачи
1 (или любое
ненулевое значение)
Программное конфигурирование обработки вывода
Если Condition_1 = 0, то задаче Task_2 разрешается обрабатывать вывод по ее
завершении.
1. Инструкция ONS ограничивает реальное выполнение инструкции SSV одним
сканированием.
2. Инструкция SSV устанавливает атрибут DisableUpdateOutputs задачи Task_2 = 0. Это
позволяет задаче автоматически обрабатывать вывод после завершения ее
выполнения.
Если Condition_1 = 1, то задаче Task_2 не разрешается обрабатывать вывод по ее
завершении.
1. Инструкция ONS ограничивает реальное выполнение инструкции SSV одним
сканированием.
2. Инструкция SSV устанавливает атрибут DisableUpdateOutputs задачи Task_2 = 1. Это
запрещает задаче автоматически обрабатывать вывод после завершения ее
выполнения.
ПРИМЕР
Управление многозадачным режимом 4-17
Publication 1756-PM001G-EN-P - March 2004
Запрещение
задачи
По умолчанию каждая задача (событийная, периодическая или
непрерывная) выполняется от своего триггера. У вас есть
возможность воспрепятствовать выполнению задачи при
возникновении соответствующего триггера (т.е. запретить задачу).
Это полезно при тестировании, диагностике и запуске вашего
проекта.
Если задача запрещена, контроллер все равно выполняет
предварительное сканирование этой задачи при переходе
контроллера из режима программирования в режим выполнения или
тестирования.
Ручное запрещение или отмена запрещения задачи
Чтобы вручную запретить выполнение задачи или снять запрет с
выполнения задачи, используйте диалоговое окно свойств для данной
задачи.
1. В организаторе контроллера щелкните правой кнопкой мыши
по соответствующей задаче и выберите Properties (Свойства).
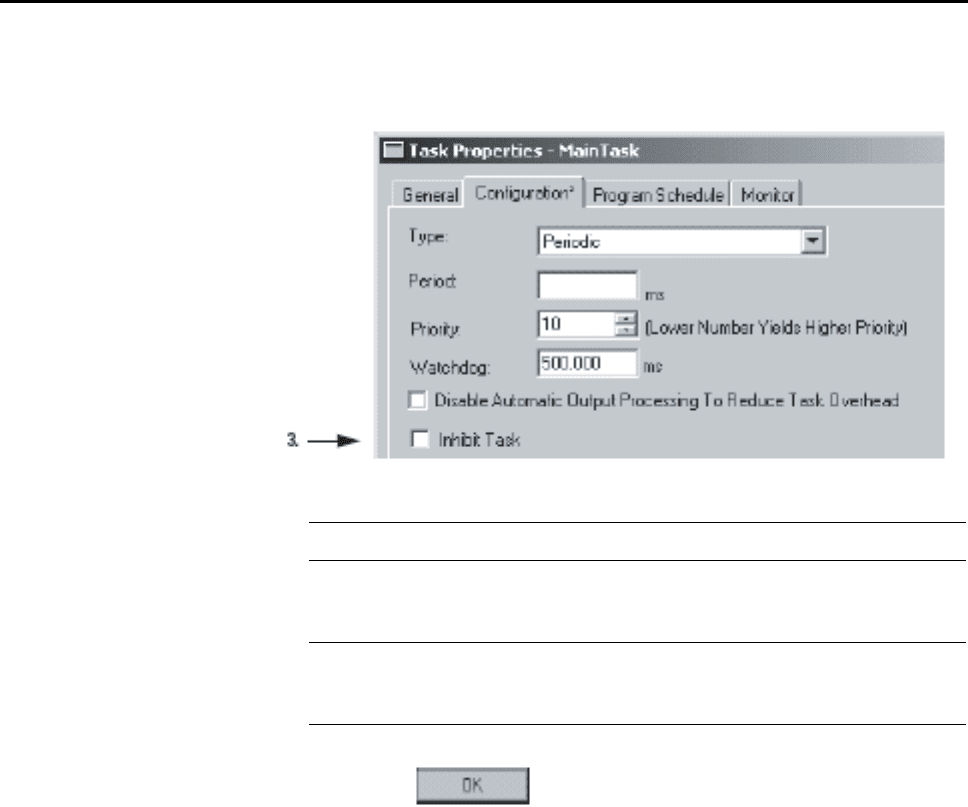
2. Щелкните по закладке Configuration (Конфигурация).
Если вы хотите: То:
разрешить выполнение задачи при
возникновении соответствующего триггера
Снимите запрет с данной задачи
(настройка по умолчанию).
запретить выполнение задачи при
возникновении соответствующего триггера
Запретите данную задачу.
Запрещение задачи
При вводе в эксплуатацию системы, использующей
несколько задач, вы можете сначала протестировать
каждую задачу в отдельности.
1. Запретите все задачи, кроме одной, и
протестируйте эту задачу.
2. Когда задача будет отвечать всем вашим
требованиям, запретите ее и снимите запрет с
какой+либо другой задачи.
3. Продолжайте этот процесс до тех пор, пока вы
не протестируете все свои задачи.
ПРИМЕР
4- 18 Управление многозадачным режимом
Publication 1756-PM001G-EN-P - March 2004
3. Запретите задачу или снимите запрет с задачи:
4. Нажмите
Если вы хотите: То:
разрешить выполнение задачи при
возникновении соответствующего
триггера
Снимите флажок Inhibit Task
(Запрещение задачи) (настройка по
умолчанию).
запретить выполнение задачи при
возникновении соответствующего
триггера
Установите флажок Inhibit Task.
Управление многозадачным режимом 4-19
Publication 1756-PM001G-EN-P - March 2004
Программное запрещение или отмена запрещения задачи
Чтобы написать логику для запрещения или отмены запрещения
какой+либо задачи, используйте инструкцию Set System Value (SSV)
для обращения к следующему атрибуту объекта TASK для данной
задачи:
Атрибут: Тип данных: Инструкция: Описание:
InhibitTask DINT GSV Не позволяет задаче выполняться.
SSV
Чтобы: Установите этот атрибут на:
разрешить выполнение задачи 0 (по умолчанию)
запретить выполнение задачи 1 (или любое ненулевое
значение)
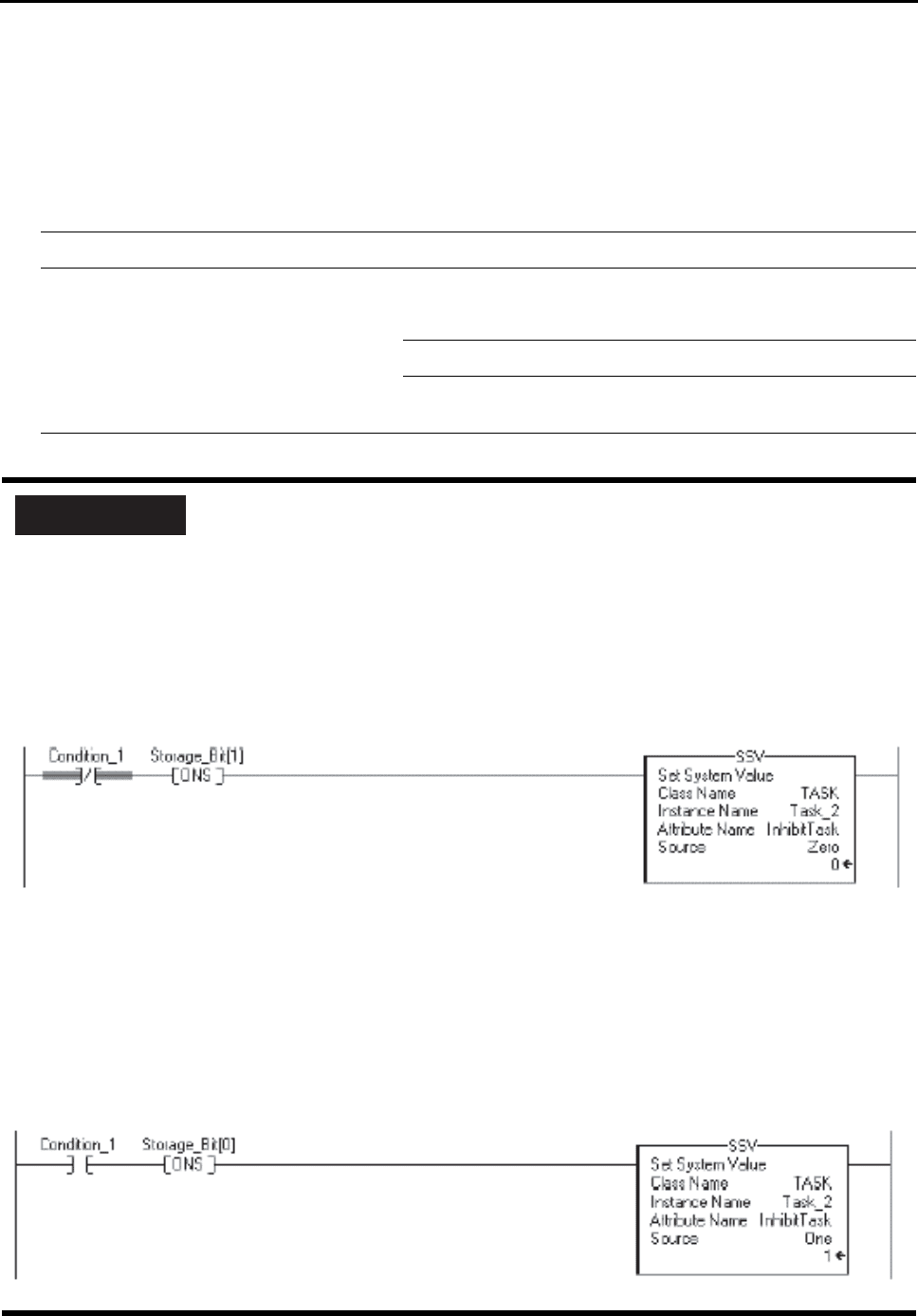
Программное запрещение или отмена запрещения задачи
Если Condition_1 = 0, то выполнение задачи Ta s k _2 разрешается.
1. Инструкция ONS ограничивает реальное выполнение инструкции SSV
одним сканированием.
2. Инструкция SSV устанавливает атрибут InhibitTask задачи Ta s k _2 = 0.
Это отменяет запрет на выполнение задачи.
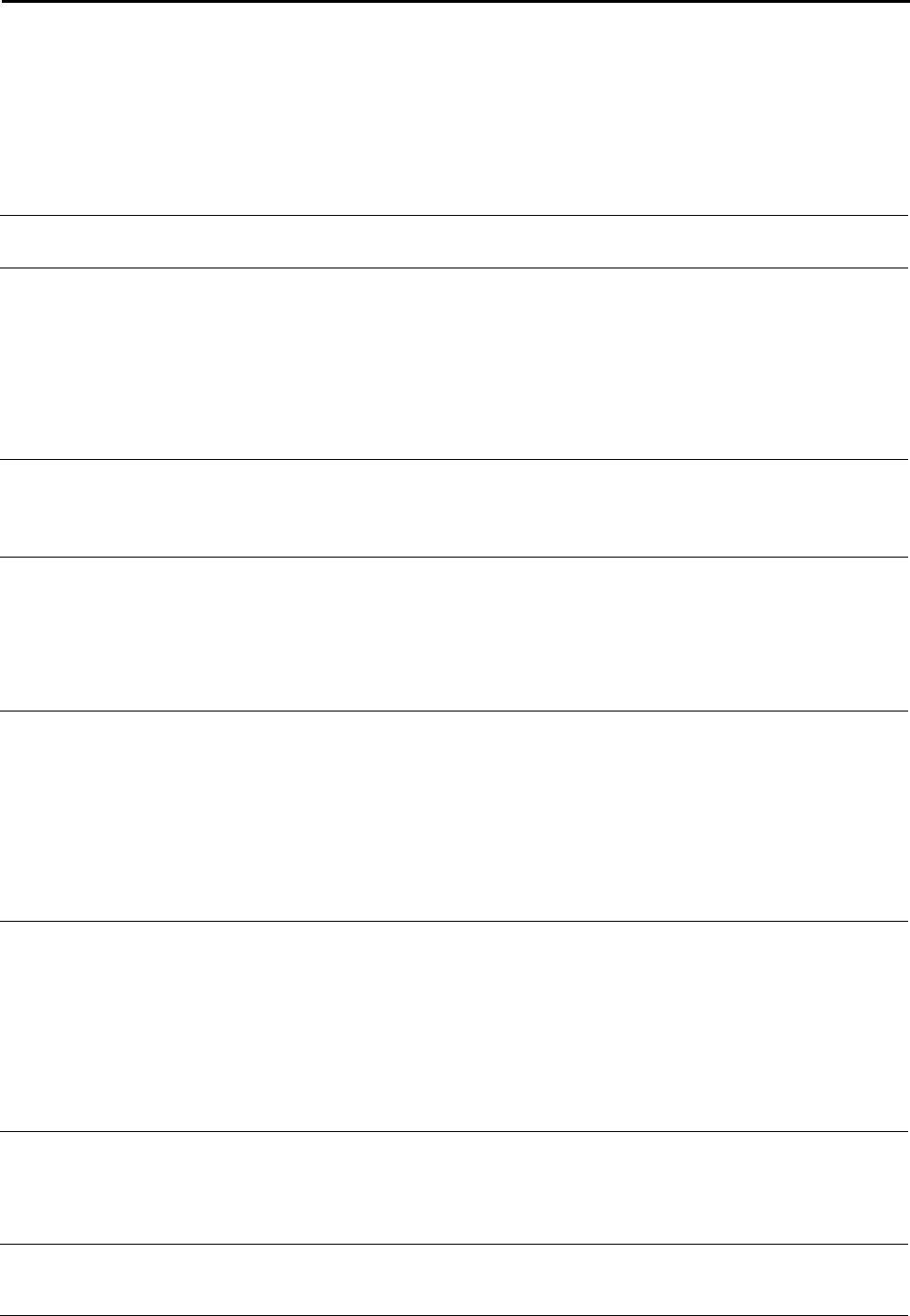
Если Condition_1 = 1, то выполнение задачи Ta s k _2 запрещается.
1. Инструкция ONS ограничивает реальное выполнение инструкции SSV
одним сканированием.
2. Инструкция SSV устанавливает атрибут InhibitTask задачи Ta s k _2 = 1.
Это запрещает выполнение задачи.
ПРИМЕР
4- 20 Управление многозадачным режимом
Publication 1756-PM001G-EN-P - March 2004
Выбор триггера
для событийной
задачи
Если событийная задача сконфигурирована правильно, она
прерывает все остальные задачи на минимальное время, требуемое
для отклика на событие. Каждой событийной задаче требуется
конкретный триггер, определяющий, когда задача должна
выполняться.
Для запуска событийной
задачи при:
Используйте
этот триггер:
С учетом следующих соображений:
включении или выключении
цифрового ввода
Module Input
Data State
Change
• Только один модуль ввода может запускать конкретную событийную задачу.
• Модуль ввода запускает событийную задачу на основе конфигурации изменения
состояния (change of state – COS) для данного модуля. Конфигурация COS
определяет, какие точки при включении или выключении побуждают модуль к
производству данных. Такое производство данных, вызванное COS, запускает
событийную задачу.
• Как правило, COS следует разрешать только для одной точки модуля. Если вы
разрешите COS для нескольких точек, может произойти перекрытие событийной
задачи.
выборке данных аналоговым
модулем
Module Input
Data State
Change
• Только один модуль ввода может запускать конкретную событийную задачу.
• Аналоговый модуль запускает событийную задачу после каждой выборки
реального времени (real time sample –RTS) по каналам.
• Все каналы модуля используют одну и ту же RTS.
получении контроллером
новых данных посредством
потребляемого тега
Consumed Tag • Только один потребляемый тег может запускать конкретную событийную задачу.
• В общем случае используйте инструкцию IOT в производящем контроллере для
подачи сигнала о производстве новых данных. Инструкция IOT устанавливает
срабатывающий по событию триггер в производящем теге. Этот триггер
переходит к потребляемому тегу и запускает событийную задачу.
• Когда потребляемый тег запускает событийную задачу, эта событийная задача
начинает выполняться только после поступления всех данных.
включении или выключении
регистрационного входа для
оси
Axis Registration
1 или 2
• Чтобы регистрационный вход запускал событийную задачу, сначала выполните
инструкцию Motion Arm Registration (MAR). Это позволяет соответствующей оси
определять регистрационный вход и, в свою очередь, запускать событийную
задачу.
• После запуска регистрационным входом событийной задачи вновь выполните
инструкцию MAR, чтобы активизировать ось для следующего регистрационного
входа.
• Если ваша логика сканируется не достаточно быстро для активизации оси для
очередного регистрационного входа, вы можете включить инструкцию MAR
непосредственно в событийную задачу.
достижении осью положения,
заданного в качестве
контрольной точки
Axis Watch • Чтобы контрольное положение запускало событийную задачу, сначала
выполните инструкцию Motion Arm Watch (MAW). Это позволяет
соответствующей оси определять контрольное положение и, в свою очередь,
запускать событийную задачу.
• После запуска контрольным положением событийной задачи вновь выполните
инструкцию MAW, чтобы активизировать ось для следующего контрольного
положения.
• Если ваша логика сканируется не достаточно быстро для активизации оси для
очередного контрольного положения, вы можете включить инструкцию MAW
непосредственно в событийную задачу
завершении выполнения
планировщика перемещений
Motion Group
Execution
• Период грубого обновления для группы перемещения запускает выполнение как
планировщика перемещений, так и событийную задачу.
• Поскольку планировщик перемещений прерывает все остальные задачи, он
выполняется первым. Если вы назначите событийной задаче наивысший
приоритет, она будет выполняться после планировщика перемещений.
наступлении определенного
условия или условий в
логике программы
инструкция
EVENT
Одна и та же задача может запускаться несколькими инструкциями EVENT. Это
позволяет выполнять задачи из других программ.