Agoston M.K. Computer Graphics and Geometric Modelling: Mathematics
Подождите немного. Документ загружается.

Proof. The corollary follows from Theorems 7.4.1.10(1) and 7.4.1.14. See also Corol-
lary 7.4.2.23(3).
Theorem 7.4.1.10(3) showed that the fundamental group of a space is not neces-
sarily abelian. Is there any connection between it and the first homology group? After
all, in both cases we are dealing with one-dimensional “holes.” To answer that ques-
tion we describe a natural map from one to the other.
Note. To simplify the discussion below we are pretending (as we earlier said we
would) that polyhedra have well-defined homology groups.
Let X be a connected polyhedron and let x
0
ΠX. Define
as follows: Let [a] Œp
1
(X,x
0
), where a:(I,∂I) Æ (X,x
0
). If is the map
then a induces a unique map b:S
1
Æ X with the property that a(t) =b(j(t)). (b is the
unique map that makes the diagram
commutative.) Now b induces a map b
*
on homology groups. If i is a fixed (“stand-
ard”) generator of H
1
(S
1
), then
7.4.1.16. Theorem.
(1) The map m defines a homomorphism of groups called the Hurewicz
homomorphism.
(2) The map m sends p
1
(X,x
0
) onto H
1
(X).
(3) The kernel of m is the commutator subgroup of p
1
(X,x
0
).
Proof. See [Cair68].
It follows from Theorem 7.4.1.16 that H
1
(X) is the abelianization of p
1
(X,x
0
). The
advantage of the fundamental group of a space is that it gives somewhat more infor-
mation about the space than the first homology group. The disadvantage is that it is
more complicated to compute.
ma b
[]
()
=
()
Œ
()
*
i H
1
X .
b
a
j
(I,∂I)
S
1
X
jppttt
()
=
()
cos ,sin ,22
j : ISÆ
1
mp:,
10 1
Xx X
()
Æ
()
H
7.4 Homotopy Theory 419
Definition. A path-connected space that has a trivial fundamental group is called
simply connected.
Analyzing spaces and maps gets much more complicated if the spaces involved
are not simply connected. The fundamental group has a subtle but significant influ-
ence on the topology of a space and its name is quite appropriate. It is probably the
single most important group from the point of view of algebraic topology. A great
many theorems have as part of their hypotheses the assumption that a space is simply
connected. See for example Theorems 7.4.3.7 and results in Section 8.7, 8.9, and 8.10.
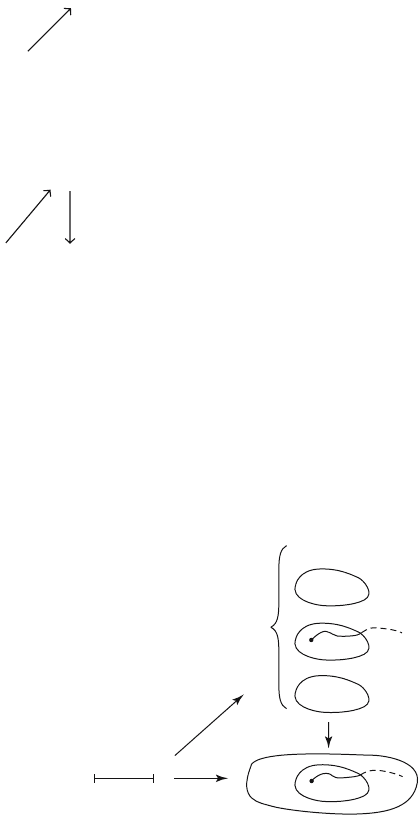
A nice way to summarize some aspects of the fundamental group and its rela-
tionship to the first homology group is as follows: If
is a continuous map, then (again ignoring the current nonuniqueness of homology
groups) there is a commutative diagram
where m is the Hurewicz homomorphism.
We end this section with an application of the fundamental group. The group plays
a central role in the study of knots. Some references for knot theory are [CroF65],
[Livi93], [Rolf76], and [Mass67].
Definition. A subspace K of R
3
is called a knot if K is homeomorphic to S
1
. The
space R
3
- K is called the complement of the knot K. Two knots K
1
and K
2
are said
to be equivalent if there is a homeomorphism h:R
3
Æ R
3
, so that h(K
1
) = K
2
.The equiv-
alence class of a knot is called its knot type. A knot is trivial if it is equivalent to the
standard S
1
in R
3
. A knot is called a polygonal knot if it is the union of a finite number
of (linear) segments, that is, it is a polygonal curve. A knot is said to be tame if it is
equivalent to a polygonal knot.
We are sticking to the traditional theory here, because the definition of a knot is
sometimes generalized to include imbeddings of n-spheres, n ≥ 1, in a space. We also
need to point out that there are other variations of the definition of a knot in the lit-
erature. Sometimes knots are defined to be maps, that is, imbeddings k:S
1
Æ R
3
,
rather than subsets. In that case, the equivalence of knots is defined in terms of
isotopies. (Two imbeddings h
0
and h
1
are said to be isotopic if there exists a one-
parameter family of imbeddings h
t
, or isotopy, between them.) Fortunately, there is
not much difference between the theories. For example, if we stick to orientation-
preserving homeomorphisms, then two knots are equivalent using our definition if
and only if they are isotopic. (We shall define what it means for a homeomorphism
between oriented manifolds to be orientation preserving in Section 7.5.1. A homeo-
morphism h:R
3
- K Æ R
3
- K is said to be orientation preserving if its extension to
S
3
Æ S
3
is.)
pp
mm
10 10
11
Xx Yy
XY
,,
,
()
æÆæ
()
ØØ
()
æÆæ
()
*
*
f
f
HH
f: , ,Xx Yy
00
()
Æ
()
420 7 Algebraic Topology
7.4 Homotopy Theory 421
Sometimes it is convenient to consider knots in S
3
rather than R
3
because S
3
is a
compact space, but there is again no real difference in the theory since, using the
stereographic projections, S
3
can be thought of as just R
3
with one point added. Note
also that, since all knot, are homeomorphic to S
1
, classifying them is not a question
of determining if they themselves are homeomorphic because they are. What makes
knots different is their imbedding in R
3
. Every knot in the plane is necessarily trivial
by the Schoenflies theorem.
In order not to have to deal with wild imbeddings, one also usually assumes that
knots are polygonal.
Definition. Let K be a knot. The fundamental group p
1
(R
3
- K) is called the group
of the knot K. (The base point of the fundamental group was omitted because we are
only interested in the group up to isomorphism.)
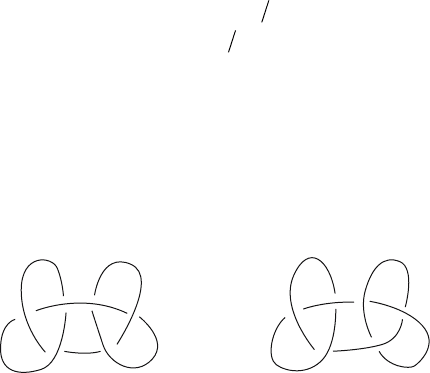
The group of a knot plays a large role in the study of knots but does not deter-
mine the knot completely because there exist inequivalent knots that have the same
knot group, such as for example, the square knot and the granny knot shown in Figure
7.22. Certainly, equivalent knots have isomorphic knot groups because their comple-
ments are homeomorphic. The knot group is only one of many interesting invariants
associated to a knot.
Before we list a few important known facts about the classification of knots, we
define a well-known infinite family of knots that serve as useful examples.
Definition. A torus knot of type (p,q), where p and q are relatively prime, is a knot
that can be imbedded in a torus and has the property that it cuts a meridian circle of
the torus in p points and a circle of latitude in q points. In cylindrical coordinates, a
specific instance of such a knot is the curve
that lies in the torus in R
3
(the circle in the x-z plane with center (2,0,0) and radius
1 rotated about the z-axis) defined by the equation
rz-
()
+=21
2
2
.
rqp
zqp
=+
()
=
()
2 cos
sin
q
q
square knot granny knot
Figure 7.22. Two inequivalent knots with isomorphic knot groups.
422 7 Algebraic Topology
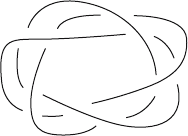
Figure 7.23 shows an example of a torus knot.
7.4.1.17. Theorem.
(1) A tame knot is trivial if and only if the group of the knot is infinite cyclic (iso-
morphic to Z). There is an algorithm that determines whether or not a knot
is trivial.
(2) Two tame knots have homotopy equivalent complements if and only if their
knot groups are isomorphic. (Conjecture: If two tame knots have homeomor-
phic complements, then they have the same knot type.)
(3) There exist infinitely many knot types. For example, the torus knots of type
(p,q) are all inequivalent.
(4) The abelianization of every knot group is infinite cyclic.
(5) If K is a tame knot, then p
i
(R
3
- K) = 0 for i > 1.
Proof. The proofs of most of these facts are much too complicated to give here. See
the references for knot theory listed earlier.
7.4.2 Covering Spaces
The topic of this section is intimately connected with the fundamental group but also
has important applications in other areas such as complex analysis and Riemann sur-
faces. Section 8.10 in the next chapter will continue the discussion and discuss the
related topic of vector bundles.
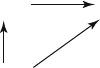
We begin with some basic terminology and motivational remarks. See Figure 7.24.
Definition. A bundle over a space X is a pair (Y,p), where Y is a topological space
and p:Y Æ X is a continuous surjective map. One calls Y the total space, p the pro-
jection, and X the base space of the bundle. The inverse images p
-1
(x) Õ Y for x Œ X,
are called the fibers of the bundle.
In our current context we should think of the total space of a bundle as consist-
ing of a union of fibers that are glued together appropriately. Of course, the general
case of an arbitrary surjective map p does not lead to anything interesting. The inter-
esting case is where all the fibers are homeomorphic to a fixed space F. The obvious
example of that is the product of the base space and F.
Definition. A bundle over X of the form (X ¥ F,p), where p is the projection onto
the first factor defined by p(x,f) = x, is called the product bundle with fiber F.
Figure 7.23. A torus knot of type (3,5).
Next, we define a notion of equivalence of bundles over a space. We begin by defin-
ing general bundle maps. They should preserve the fibers (map fibers to fibers) since
that is the only structure present.
Definition. A bundle map from a bundle (Y
1
,p
1
) over a space X to a bundle (Y
2
,p
2
)
over X is a map
with the property that
is a commutative diagram (p
1
= p
2
°
f). The bundle map f is called a bundle isomorphism
and we say that the bundles (Y
1
,p
1
) and (Y
2
,p
2
) are isomorphic if f is a homeomorphism.
If (Y,p) = (Y
1
,p
1
) = (Y
2
,p
2
), then a bundle isomorphism is called a bundle automorphism
of (Y,p).
Definition. A bundle (Y,p) over a space X that is isomorphic to a product bundle is
called a trivial bundle. The bundle is called a locally trivial bundle if for every x ΠX
there is an open neighborhood U of x in X such that (p
-1
(U),pΩp
-1
(U)) is isomorphic
to a trivial bundle over U.
If all locally trivial bundles were trivial bundles, there would be no point in intro-
ducing the concept of bundle. The next example describes a very simple nontrivial
bundle.
7.4.2.1. Example. If we consider P
n
as the quotient space of S
n
where antipodal
points are identified and let p:S
n
Æ P
n
be the quotient map, then one can show that
(S
n
,p) is a locally trivial bundle over P
n
(Exercise 7.4.2.1). Every fiber is the discrete
space consisting of two points. Clearly, (S
n
,p) is not a trivial bundle because S
n
is con-
nected and the trivial bundle with fibers consisting of two points would not be.
YY
X
12
12
f
pp
æÆæ
f: YY
12
Æ
7.4 Homotopy Theory 423
total space
base space
projection
Y
X
p
fibers p
–1
(x) ≈ F
Figure 7.24. Basic bundle terminology.

It is the bundles with discrete fibers that interest us in this section. In Section 8.10
we shall look at bundles whose fibers are vector spaces.
Definition. A covering space for a space X is a locally trivial bundle with base space
X with the property that every fiber is a discrete space. The covering is called an
n-fold covering if every fiber consists of n points. The bundle automorphisms of a
covering space are called covering transformations.
Example 7.4.2.1 already described a 2-fold covering space. Here are some more
examples.
7.4.2.2. Example. The map
defines a covering space (R,p) of S
1
whose fibers
are a countable discrete set of points.
7.4.2.3. Example. Consider the circle S
1
as a subset of the complex plane C. The
map
defines a bundle (S
1
,p) over S
1
that is an n-fold covering space for S
1
.
7.4.2.4. Example. The map
defines a is a covering space (R
2
,p) of the torus S
1
¥ S
1
.
That all the total spaces in our examples were manifolds should not be
surprising.
pst t t t t, cos ,sin , cos ,sin .
()
=
()()()
p: RSSRR
21122
ƥà ¥
p
n
zz
()
=
p: SS
11
Æ
pt t nn
-
()
=+ Œ
{}
1
2p Z
pt t t
()
=
()
cos ,sin
p: RSÆ
1
424 7 Algebraic Topology
7.4.2.5. Theorem. The total space of a covering space of a topological manifold is
a topological manifold.
Proof. This is obvious from the local triviality property of the bundle.
When one works with covering spaces or bundles in general, some of the most
important tools are map-lifting tools.
Definition. Let (Y,p) be a covering space for a space X and let g:[a,b] Æ X be a con-
tinuous curve. A map g˜ :[a,b] Æ Y is called a lifting of the curve g starting at g˜(a) if
we have a commutative diagram
that is, p
°
g˜ =g. More generally, given a map f : Z Æ X, any map
˜
f:Z Æ Y is called a
lifting of f if we have a commutative diagram
that is, p
°
f
˜
= f.
7.4.2.6. Theorem. (The Path-Lifting Theorem) Let (Y,p) be a covering space for a
space X. Let x
0
ΠX and y
0
Πp
-1
(x
0
). Then every continuous curve g:[0,1] Æ X lifts
to a unique continuous curve g˜:[0,1] Æ Y that starts at y
0
.
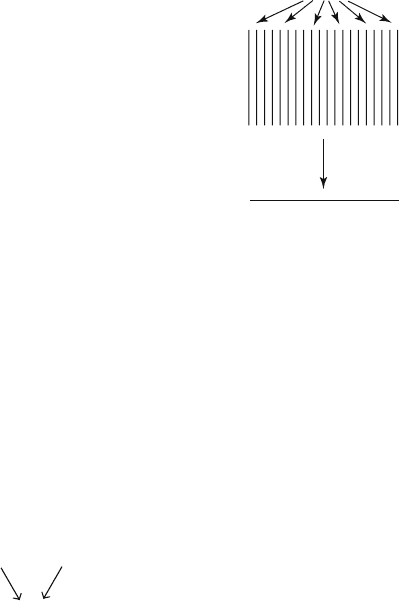
Proof. We sketch a proof of this theorem. It will give the reader a good idea of the
kind of arguments one uses with covering spaces. Figure 7.25 shows what is involved.
ZX
f
æÆæ ,
Y
˜
fp
Y
X
˜
,,
g
g
Ø
[]
æÆæ
p
ab
7.4 Homotopy Theory 425
····
g
g (t)
g
X
Y
U
p
x
0
y
0
01
~
I
p
–1
(U)
Figure 7.25. Lifting paths.
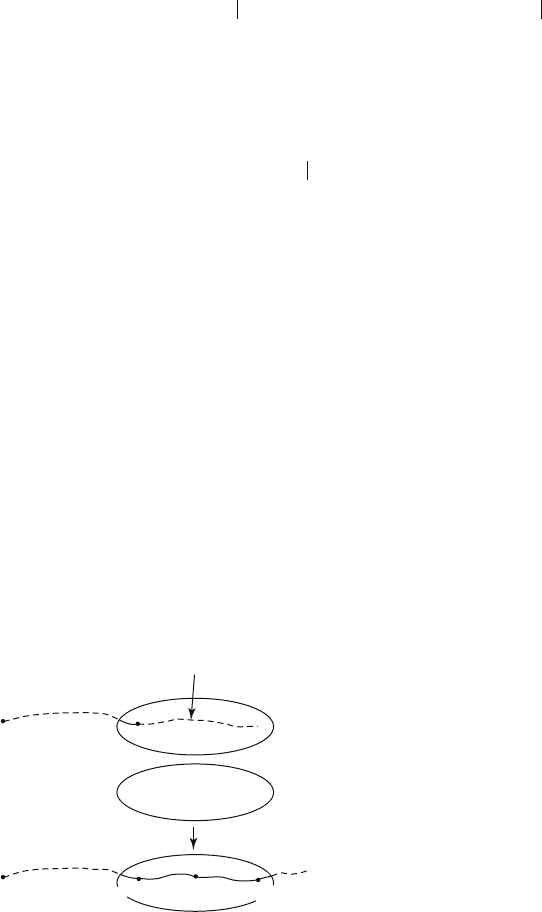
426 7 Algebraic Topology
The easy case is where one can find an open neighborhood U of x
0
over which the
covering space is trivial and that contains the curve g(t). The set p
-1
(U) will consist of
disjoint open sets in Y that are homeomorphic copies of U. Let V be the one that con-
tains y
0
and let p
V
= pΩV. Then g˜ = p
V
-1
°
g is the unique curve we seek. For the general
case, we separate the proof into two parts.
We prove uniqueness first. Let g˜
1
and g˜
2
be two liftings of g that start at y
0
. Con-
sider the sets
These are obviously disjoint sets whose union is [0,1]. Using continuity, it is easy to
show that both of these sets are open in [0,1]. Since 0 ΠA, A is nonempty. But [0,1]
is connected and so B must be the empty set and we have proved uniqueness.
To prove the existence of a g˜, consider the set
Figure 7.26 should help the reader follow the rest of the argument. Since the cover-
ing space is trivial over an open neighborhood of x
0
and we know how to lift paths
over such a neighborhoods, the set C will contain a small neighborhood of 0 and
hence, if c is the supremum of C, then 0 < c £ 1. If c = 1, we are done. Assume that
c < 1. Choose a neighborhood U of g(c) over which the covering space is trivial. Choose
e>0, such that [c - 2e,c + 2e] Ã [0,1] and g([c - 2e,c + 2e]) Ã U. By the definition of
c, there is a lifting
of
Because the curve gΩ[c - 2e,c + 2e] lies in U it can be lifted to Y, that is, the lifting g˜
can be extended to a lifting of gΩ[0,c + 2e]. This contradicts the fact that c was the
supremum of the set C and so c < 1 is impossible.
ge:, .0c-
[]
Æ X
˜
:,ge0c-
[]
Æ Y
C t there t=Œ
[] []
{}
01 0,,. is a lifting of overg
AB=Œ
[]
()
=
()
{}
=Œ
[]
()
π
()
{}
t t t and t t t01 01
12 12
,
˜˜
,
˜˜
.gg gg
y
0
= g (0)
y
0
= g (0)
X
Y
p
U
lifting of g | [c – e, c + 2e]
~
~
g (c – e)
g (c – e)
g (c + 2e)
g (c)
Figure 7.26. Proving the existence of path
liftings.
The importance of Theorem 7.4.2.6 is not only that every path in the base space
lifts to path in the total space but that the lift is essentially unique, meaning that if
two lifted paths agree at one point, then they agree everywhere. The unique lifting
property generalizes to arbitrary connected spaces not just the interval [0,1]. Another
important lifting theorem is the following:
7.4.2.7. Theorem. (The Homotopy Lifting Theorem) Let (Y,p) be a covering space
for a space X. Let h:Z ¥ [0,1] Æ X be a continuous map. Define h
t
:Z Æ X by h
t
(y) =
h(y,t). If h
˜
0
is a lifting of h
0
, then h lifts to a unique continuous map h
˜
:Z ¥ [0,1] Æ Y
so that h
˜
(y,0) = h
˜
0
(y).
Proof. See [Jäni84]. Figure 7.27 tries to indicate the relationship between the various
maps.
7.4.2.8. Corollary. (The Monodromy Lemma) Let (Y,p) be a covering space for a
space X. Let g
0
, g
1
:[0,1] Æ X be two continuous curves that start at the same point x
0
and end at the same point x
1
, that is, x
0
=g
0
(0) =g
1
(0) and x
1
=g
0
(1) =g
1
(1). Assume
that g
0
and g
1
are homotopic by a homotopy h that fixes the endpoints, that is, h(t,0)
= x
0
and h(t,1) = x
1
, for all t Œ [0,1]. If, g˜
0
, g˜
1
:[0,1] Æ Y are liftings of g
0
and g
1
, respec-
tively, that start at the same point in Y, then g˜
0
and g˜
1
will end at the same point, that
is, g˜
0
(1) =g˜
1
(1).
Proof. This is an easy consequence of Theorem 7.4.2.7.
Corollary 7.4.2.8 is an important uniqueness type theorem. It says that if one lifts
two homotopic paths that start and end at the same point, then the lifted paths will
also end at the same point if they start at the same point.
The next two results describe some relationships between the fundamental groups
of the total and base space of a covering space.
7.4.2.9. Theorem. Let (Y,p) be a covering space for a space X. Let x
0
ΠX and y
0
Œ
p
-1
(x
0
). Then the induced homomorphism
p
*
()
Æ
()
:, ,pp
10 10
Yy Xx
7.4 Homotopy Theory 427
t
Z ¥ 0
Z ¥ 1
Z ¥ [0,1]
h
h
0
h
0
h
h
1
~
~
~
p
h(z,t)
h(z,t)
X
Y
Figure 7.27. Lifting a homotopy.

is one-to-one.
Proof. See [Mass67] or [Jäni84]. Basically, if an element [f] maps to 0, then the map
p
°
f is homotopic to a constant in X and this homotopy lifts to a homotopy between f
and the constant map in Y.
A natural question is if y
1
Πp
-1
(x
0
), then what is the relation between the sub-
groups p
*
(p
1
(Y,y
1
)) and p
*
(p
1
(Y,y
0
)) in p
1
(X,x
0
)? There is an easy answer.
7.4.2.10. Theorem. Let (Y,p) be a covering space for a space X and let x
0
ΠX. If Y
is connected, then the subgroups p
*
(p
1
(Y,y
0
)) in p
1
(X,x
0
) as y
0
ranges over the points
in p
-1
(x
0
) generate a conjugacy class of subgroups in p
1
(X,x
0
).
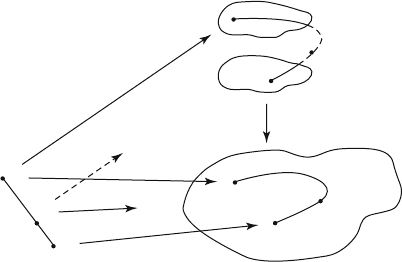
Proof. See [Mass67]. The result follows easily from the following observations. Let
y
0
, y
1
Πp
-1
(x
0
). Let a˜ : [0,1] Æ Y be a curve with a˜ (0) = y
0
and a˜ (1) = y
1
. The curve a
= p
°
a˜ : [0,1] Æ X is a loop at x
0
. If [g˜] Œp
1
(Y,y
1
), then define m˜ : [0,1] Æ Y by
Now, set g=p
°
g˜ and m=p
°
m˜. It is easy to show that [m˜] Œp
1
(Y,y
0
) and [m] = [a]
-1
[g][a]
Œp
1
(X,x
0
). See Figure 7.28.
Next, we would like to classify covering spaces. Let (Y,p) be a covering space for
a space X and let x
0
ΠX and y
0
Πp
-1
(x
0
). First, we shall answer the question about
when maps from some arbitrary space Z into X lifts to a map into Y. Let z
0
ΠZ. The
specific question is, given a map f : (Z,z
0
) Æ (X,x
0
), when does a lifting f
˜
: (Z,z
0
) Æ
(Y,y
0
) exist? In terms of diagrams, we are given f and p and are looking for an f
˜
that
will produce a commutative diagram
˜
˜
,,,
˜
,,,
˜
,,.
ma
g
a
tt t
t
t
tt
()
=
()
Œ
È
Î
Í
˘
˚
˙
=
-
Ê
Ë
ˆ
¯
Œ
È
Î
Í
˘
˚
˙
=-
()
Œ
È
Î
Í
˘
˚
˙
30
1
3
31
2
1
3
2
3
33
2
3
1
428 7 Algebraic Topology
x
0
X
Y
P
~
~
g
a
a
g
y
0
y
1
Figure 7.28. How loops in the total space project to
conjugate loops.