Agoston M.K. Computer Graphics and Geometric Modelling: Mathematics
Подождите немного. Документ загружается.

and the equation for the rotation R about the origin through the angle -q is
Let C be the curve defined by (3.60). Then the curve C≤=RT(C) has equation
(3.62)
and we are done.
Next, we use the eigenvalue approach. The eigenvalues are the roots of equation
(3.49), which reduces to
in this case. To solve for the eigenvectors for eigenvalues 25 and 100 we must solve
that is,
respectively. The solutions for the first equation are x = (4/3)y, so that u
1
= (4/5,3/5) is
a unit eigenvector for eigenvalue 25. The solutions for the second equation are x =
(-3/4)y, so that u
2
= (-3/5,4/5) is a unit eigenvector for eigenvalue 100. The sub-
stitution specified by equation (3.51) would then again give us equation (3.62). It
corresponds to the same rotation R described above.
One point that one needs to be aware of when using the eigenvalue approach is
that there is some leeway as to our choice of eigenvectors. Our only real constraint is
that the orthonormal basis (u
1
,u
2
) induce the standard orientation of the plane
because we want a rigid motion, specifically, a rotation. On the other hand, (u
2
,-u
1
)
would have been a legitimate alternative choice. This would have reduced our conic
equation to
But then, there are always basically two standard forms to which a general conic equa-
tion can be reduced. Which one we get depends on our choice of which axis we call
the x- and y-axis.
440
22
xy+-=.
x and x y y
()
-
-
Ê
Ë
ˆ
¯
=
() ()
Ê
Ë
ˆ
¯
=
()
27 36
36 48
00
48 36
36 27
00,
xy I B and xy I B
()
-
()
=
()
-
()
=25 0 100 0
22
,
xx xx
2
125 2500 25 100 0-+ =-
()
-
()
=
xy
22
440+-=
¢=- +yxy
3
5
4
5
.
¢= +xxy
4
5
3
5
cos sin ,qq==
4
5
3
5
and
3.6 Conic Sections 179

3.6.6. Example. To transform
(3.63)
into standard form.
Solution. We have
Therefore, I = 25, D=det (A) = 0, and D = det (B) = 0. By Theorem 3.5.1.3(3.c) we are
dealing with two parallel lines since E = 0
2
- 16(-100) = 1600. Equation (3.59) implies
that (3.63) can be transformed into
via a rotation through an angle -q, where tanq=-4/3 .
Note that equation (3.57) implies that (3.63) is equivalent to
which can easily be checked.
This finishes our discussion of the main results about quadratic equations in two
variables. In the process we have proved the following:
3.6.7. Theorem. Every nonempty conic is a conic section. Conversely, if we coor-
dinatize the intersecting plane in the definition of a conic section, then the conic
section is defined by an equation of the form (3.35) in that coordinate system, that is,
it is a conic.
Theorem 3.6.7 justifies the fact that the term “conic” and “conic section” are used
interchangeably.
3.6.1 Projective Properties of Conics
This section looks at some projective properties of conics. There is an important corol-
lary to Theorem 3.6.3.
3.6.1.1. Theorem. All nonempty nondegenerate (affine) conics are projectively
equivalent.
Proof. Since the conic is nonempty and nondegenerate, Theorem 3.6.3 implies that
it is projectively equivalent to a conic with equation
yx=- ±
4
3
10
3
,
25 100 0
2
y -=
A and B=
-
Ê
Ë
Á
Á
ˆ
¯
˜
˜
=
Ê
Ë
ˆ
¯
16 12 0
12 9 0
0 0 100
16 12
12 9
.
16 24 9 100 0
22
xxyy++-=
180 3 Projective Geometry
This shows that every such conic is projectively equivalent to the unit circle and we
are done.
3.6.1.2. Example. To show that the conic y = x
2
is projectively equivalent to the unit
circle.
Solution. Passing to homogeneous coordinates, the conic is defined by the equation
(3.64)
with associated symmetric matrix
Using elementary matrices, we shall now show that A is congruent to a diagonal
matrix. First of all, if E is the elementary matrix E
23
(-1), then
Next, let F be the elementary matrix E
32
(1/2). Then
Finally, if G is the elementary matrix E
33
(2), then
It follows that if
AGAG
T
32
10 0
01 0
00 1
==
-
Ê
Ë
Á
Á
ˆ
¯
˜
˜
.
AFAF
T
21
10 0
01 0
00
1
4
==
-
Ê
Ë
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
.
A EAE
T
1
10 0
01
1
2
0
1
2
0
== -
-
Ê
Ë
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
.
A =-
-
Ê
Ë
Á
Á
Á
Á
Á
ˆ
¯
˜
˜
˜
˜
˜
10 0
00
1
2
0
1
2
0
.
xyz
2
0-=
xyz or y
222 2
010+-= +-=
()
x using Cartesian coordinates
2
.
3.6 Conic Sections 181

then MAM
T
is the diagonal matrix A
3
, that is, our conic is projectively equivalent to
the unit circle
and we are done.
Example 3.6.1.2 leads us to some observations about the relationship between a
conic in R
2
and the associated projective conic in P
2
. Consider the solutions to equa-
tion (3.64). One of the solutions (in P
2
) is the ideal point which has z = 0. Substitut-
ing this value into (3.64) defines the line x = 0 in R
2
. In other words, the parabola y
= x
2
corresponds to the conic in P
2
, which contains the same real points and has one
additional ideal point corresponding to the line x = 0. As another example, consider
the hyperbola
(3.65)
The homogeneous equation for this conic is
(3.66)
The ideal points with z = 0 lead to the equations
(3.67a)
and
(3.67b)
which define two lines in R
2
. It follows that the conic in P
2
defined by (3.66) is topo-
logically a circle that consists of the points defined by the real roots of equation (3.65)
together with two extra (ideal) points associated to the lines in (3.67a) and (3.67b).
Intuitively, if we were to walk along points (x,y) on the curve (3.65) where these points
approach either (+•,+•) or (-•,-•) we would in either case approach the ideal point
associated to the line defined by equation (3.67a). Letting x and y approach either
(-•,+•) or (+•,-•) would bring us to the ideal point associated to the line defined by
equation (3.67b).
y
b
a
x=-
y
b
a
x=
x
a
y
b
z
2
2
2
2
2
0--=.
x
a
y
b
2
2
2
2
1-=.
xy
22
1+=,
M GFE== -
Ê
Ë
Á
Á
ˆ
¯
˜
˜
10 0
01 1
01 1
,
182 3 Projective Geometry

3.6.1.3. Theorem. A conic can be found that passes through any given five points.
It is unique if no four of these points is collinear.
Proof. We use homogeneous coordinates and need to show that we can always find
a nondegenerate equation of the form
which is satisfied for the points. One such equation is
For the rest, see [PenP86].
Next, we look at some problems dealing with fitting conics to given data. The
following fact is used in justifying the constructions.
3.6.1.4. Lemma. If C
1
and C
2
are affine conics with equations C
1
(x,y) = 0 and
C
2
(x,y) = 0, then
or
is the equation of a conic C
l
that passes through the intersection points of the two
given conics. If C
1
and C
2
have exactly four points of intersection, then the family C
l
,
lŒR*, of conics consists of all the conics through these four points and each one is
completely determined by specifying a fifth point on it.
Proof. See [PenP86].
Our design problems will also involve tangent lines and so we need to define those.
Tangent lines play an important role when studying the geometry of curves. There are
different ways to define them depending on whether one is looking at the curve from
a topological or algebraic point of view. The definition we give here is specialized to
conics. More general definitions will be encountered in Chapter 8 and 10. Our present
definition is based on the fact that, at a point of a nondegenerate conic, the line that
we would want to call the tangent line has the property that it is the only line through
that point that meets the conic in only that point.
Cxy Cxy Cxy
•
()
=
()
-
()
=,,,
12
0
Cxy Cxy Cxy
l
ll,, ,
()
=
()
+-
()()
=
12
10
xyz xy xz yz
xyzxy xzyz
xyzxyxzyz
xyzxyxzyz
xyzxyxzyz
xyzxyxzyz
222
1
2
1
2
1
2
1 1 11 11
2
2
2
2
2
2
2 2 22 22
3
2
3
2
3
2
3 3 33 33
4
2
4
2
4
2
4 4 44 44
5
2
5
2
5
2
5 5 55 55
0= .
ax by cz dxy exz fyz
222
0+++++=,
3.6 Conic Sections 183
3.6.1.5. Theorem. Let C be a nondegenerate conic in P
2
. Any line L in P
2
intersects
C in 0, 1, or 2 points. Given any point p on C, there is one and only one line that inter-
sects C in that single point.
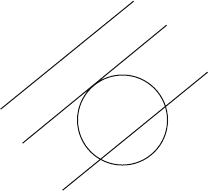
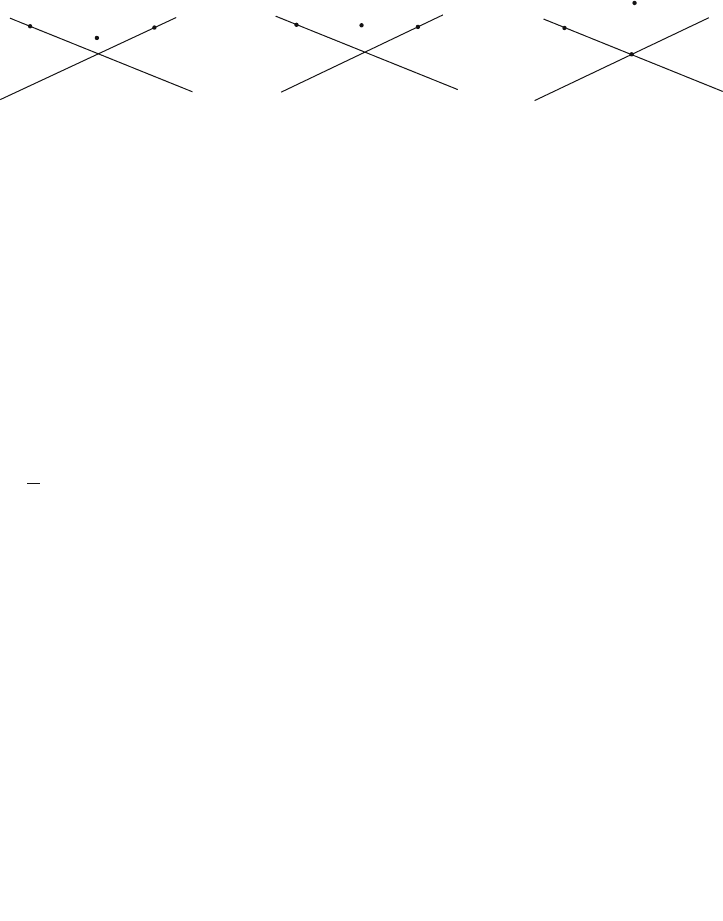
Proof. This fact is easily checked if C is a circle. See Figure 3.22. The general case
follows from the fact that any nonempty nondegenerate conic is projectively equiva-
lent to a circle.
Definition. If a line L meets a nondegenerate conic C in a single point p, then L is
called the tangent line to C at p. This definition applies to both the affine and projec-
tive conics.
3.6.1.6. Theorem. If a nondegenerate conic is defined in homogeneous coordinates
by the equation
then, in terms of homogeneous coordinates, the equation of the tangent line L to the
conic at a point P
0
is
(3.68)
In particular, [L] = [p
0
Q].
Proof. The line defined by equation (3.68) clearly contains [p
0
]. It therefore suffices
to show that if another point satisfied equation (3.68), then the conic would be degen-
erate. See [PenP86].
3.6.1.7. Corollary. The equation of the tangent line at a point (x
0
,y
0
) of a conic
defined by equation (3.35) is
Proof. Obvious.
ax hy f x hx by g y fx gy c
00 00 00
0++
()
+++
()
++ +=.
ppQ
T
0
0= .
ppQ
T
= 0,
184 3 Projective Geometry
Figure 3.22. Possible line/circle intersections.
We now describe solutions to five conic design problems in the plane R
2
. The fact
that the solutions are indeed correct follows easily from the above, in particular by
repeated use of Lemma 3.6.1.4. See [PenP86] for details.
Conic design problem 1: To find the equation of the conic passing through
four points p
1
, p
2
, p
3
, and p
4
that has a given line L through one of these points
as tangent line. Assume that at least two of the points do not lie on L. If three points
lie off L, then no two of them are allowed to be collinear with the fourth. See Figure
3.23.
Solution. Assume that L is the tangent line at p
1
and that p
2
and p
3
do not lie on
L. Let L
2
be the line through p
1
and p
2
, let L
3
be the line through p
1
and p
3
, and let
L
4
be the line through p
2
and p
3
. Let [L] = [a,b,c] and [L
i
] = [a
i
,b
i
,c
i
]. Define symmetric
3 ¥ 3 matrices Q
1
and Q
2
by
Let C
i
(x,y) = 0 be the quadratic equation associated to Q
i
. Let p
4
= (x
4
,y
4
). If
then there is a unique l so that C
l
(x
4
,y
4
) = 0 and that is the equation of the conic we
want.
3.6.1.8. Example. To find the conic that passes through the points p
1
, p
2
= (2,-2),
p
3
= (2,2), p
4
= (5,0), and that has tangent line L at p
1
for the case where p
1
and L
have the values
Solution for (a): See Figure 3.24(a). We have the following equations for the lines
L
i
:
ax bx
()
=-
()
+=
()
=
()
-=
1
pL pL
1
10 1 0 30 3 0,, : ,, :
Cxy Cxy Cxy
l
ll,, ,,
()
=
()
+-
()()
12
1
Q a b c a b c a b c a b c and
Qabcabcabcabc
T
t
T
TT
144444
2222333333222
1
2
1
2
=
()( )
+
()()
()
=
()()
+
()()
()
,, ,, ,, ,,
,, ,, ,, ,, .
3.6 Conic Sections 185
p
2
p
3
p
4
p
1
p
1
p
2
p
3
p
3
p
4
p
2
p
1
L
p
4
L
L
(a) Valid case
(b) Disallowed case
(c) Disallowed case
Figure 3.23. Conic design problem 1.
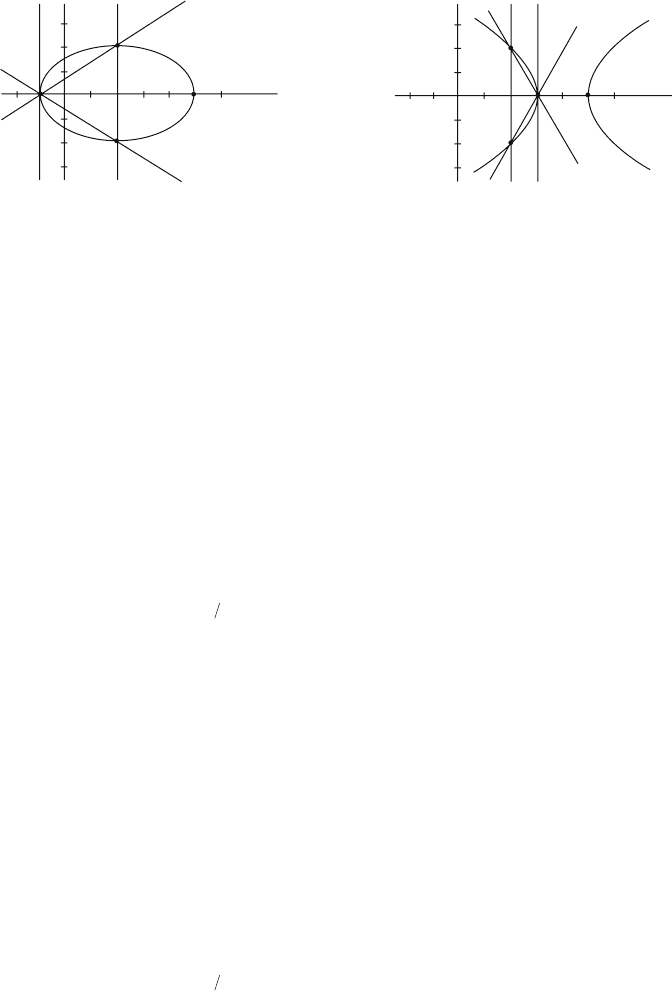
Therefore,
Solving C
l
(5,0) = 0 for l gives l=8/7, so that our conic is the ellipse
Solution for (b): See Figure 3.24(b). We have the following equations for the lines
L
i
:
This time
Solving C
l
(5,0) = 0 for l gives l=8/5, so that our conic is the hyperbola
Conic design problem 2: To find the equation of the conic passing through three
points p
1
, p
2
, and p
3
that has two given lines L
1
and L
2
through two of these points
as tangent lines. Assume that the three points are not collinear and that the intersec-
Cxy x y
85
2
2
443 40,.
()
=- -
()
++=
Cxy x x xy xy
l
ll,.
()
=-
()
-
()
+-
()
+-
()
--
()
3212 62 6
L
4
20:x-=
L
3
260:xy--=
L
2
260:xy+-=
Cxy x y
87
2
2
429 360,.
()
=-
()
+-=
Cxy x x x y x y
l
ll,.
()
=+
()
-
()
+-
()
++
()
-+
()
1 21 232232
L
4
20:x-=
L
3
2320:x y-+=
L
2
2320:x y++=
186 3 Projective Geometry
L
L
4
L
4
L
3
L
3
p
3
p
3
p
1
p
4
p
2
p
1
p
2
L
2
L
2
L
p
4
y
x
y
x
(a)
(b)
Figure 3.24. The conics that solve Example 3.6.1.6.
tion of the two lines is neither of the points where L
1
and L
2
are tangent to the conic.
See Figure 3.25.
Solution. Assume that L
1
and L
2
are tangent lines at p
1
and p
2
, respectively. Let L
3
be the line through p
1
and p
2
and let [L
i
] = [a
i
,b
i
,c
i
]. Define symmetric 3 ¥ 3 matrices
Q
1
and Q
2
by
Let C
i
(x,y) = 0 be the quadratic equation associated to Q
i
. Let p
3
= (x
3
,y
3
). If
then there is a unique l so that C
l
(x
3
,y
3
) = 0 and that is the equation of the conic we
want. Equivalently, if
then there is unique l so that (x
3
,y
3
,1)Q
l
(x
3
,y
3
,1) = 0.
3.6.1.9. Example. To find the conic that passes through the points p
1
= (4,-4) and
p
2
= (4,4), has tangent lines
at those points, and also passes through the point
Solution. First note that the line L
3
through p
1
and p
2
is clearly defined by
L
3
40:x-=
abc
()
=
() ()
=
() ()
=-
()
333
ppp00 10 10,, ,
L
2
240:,xy++=
L
1
240:,xy-+=
QQ Q
l
ll=+-
()
12
1,
Cxy Cxy Cxy
l
ll,, ,,
()
=
()
+-
()()
12
1
Q abc abc abc abc and Q abc abc
TT T
1 111 222 222 111 2 333 333
1
2
=
()( )
+
()()
()
=
()()
,, ,, ,, ,, ,, ,,.
3.6 Conic Sections 187
p
1
p
1
p
1
p
2
p
2
p
3
p
3
p
2
p
3
L
1
L
1
L
1
L
2
L
2
L
2
(a) Valid case
(b) Disallowed case (c) Disallowed case
Figure 3.25. Conic design problem 2.
and
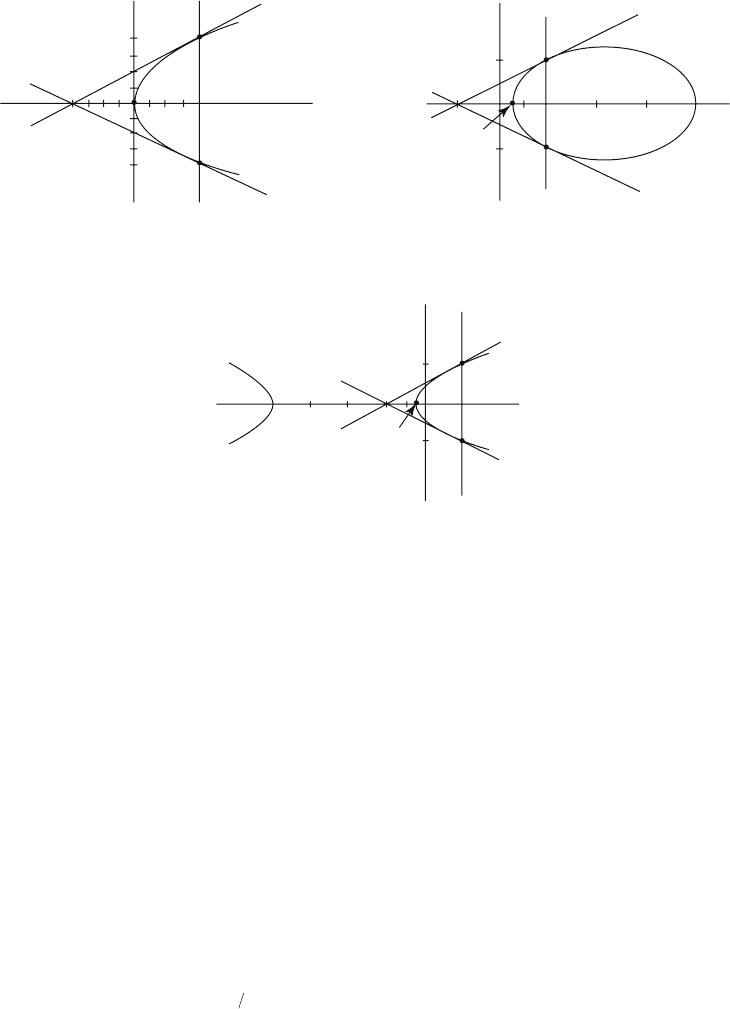
Case p
3
= (0,0): See Figure 3.26(a). The equation C
l
(0,0) = 0 leads to the impos-
sible condition l = 0. This corresponds to the case l=•. Therefore, the conic we are
looking for is the parabola
Case p
3
= (1,0): See Figure 3.26(b). The equation C
l
(1,0) = 0 leads to the solu-
tion l=-9/16. This time our conic is the ellipse
Case p
3
= (-1,0): See Figure 3.26(c). The equation C
l
(-1,0) = 0 leads to the solu-
tion l=25/16. This time our conic is the hyperbola
Cxyx xy
-
()
=-++=
916
22
4 68 9 64 0,.
Cxy x y x y x y x
•
()
=-+
()
++
()
--
()
=-,.24 24 4 4
2
2
Cxy x y x y x
l
ll,.
()
=-+
()
++
()
+-
()
-
()
24 241 4
2
188 3 Projective Geometry
L
3
L
3
L
3
L
2
L
2
L
2
L
1
L
1
L
1
y
(a)
(b)
(c)
p
3
(0,0)
p
3
(1,0)
p
3
(–1,0)
p
2
(4,4)
p
2
(4,4)
p
1
(4,–4)
p
1
(4,–4)
p
2
(4,4)
p
1
(4,–4)
y
x
y
x
Figure 3.26. The conics that solve Example 3.6.1.7.