AckermannTh. (ed) Wind Power in Power Systems
Подождите немного. Документ загружается.


//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 641 – [629–652/24]
17.12.2004 10:51PM
variable-speed wind turbines than for constant -speed wind turbines [Figure 28.3(a.ii)],
particularly if they are equipped with terminal voltage co ntrol. Further, it can be seen
that the rotor speed of the variable-speed turbine behaves more smoothly than that of a
constant-speed wind turbine. Variable-speed wind turbines do not have to be resyn-
chronised by the system, as is the case with constant-speed turbines. Rather, the con-
trollers of the variable-speed turbine control the rotor speed independent of the grid
frequency. Constant-speed turbines do not have such controllers. As mentioned earlier,
the exact behaviour of the rotor speed depends on the control strategy.
Voltage and rotor speed instability are not triggered only by faults. The tripping of a
synchronous generator from the grid may also result in a voltage drop that causes voltage
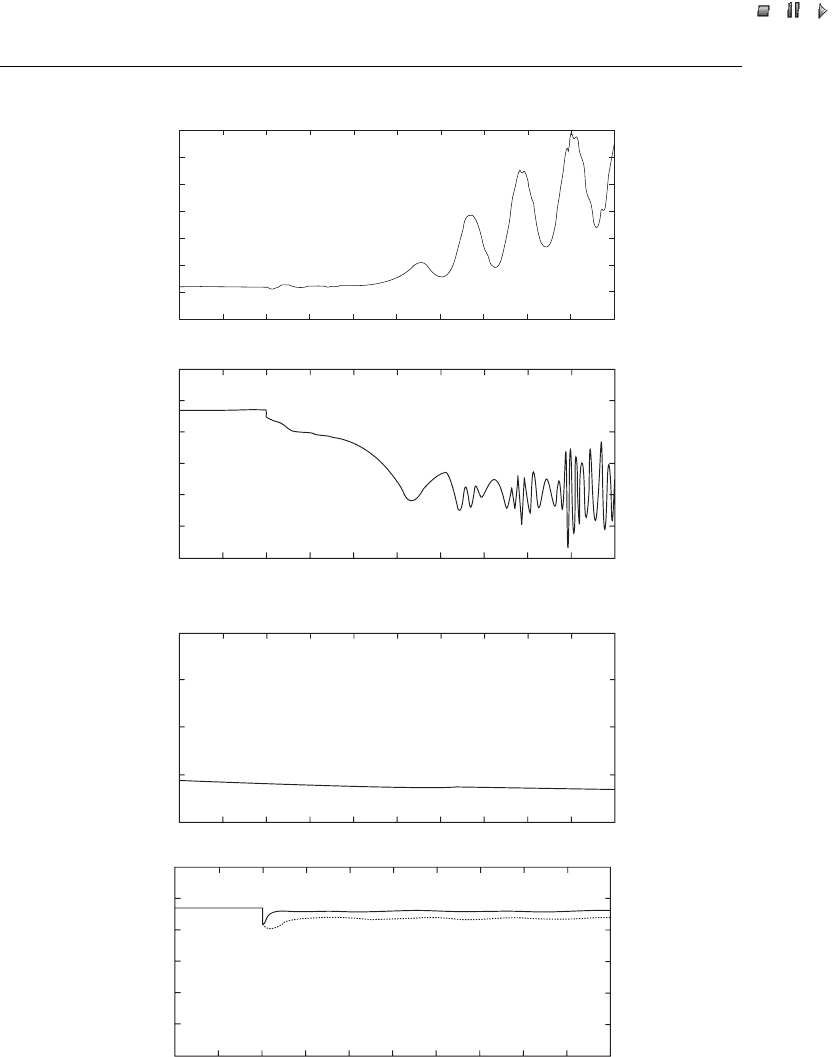
and rotor speed instability. Figures 28.4(a.i) and 28.4(a.ii) depict the rotor speed of a wind
farm with constant-speed turbines and the voltage at bus 32 when the synchronous
generator at bus 31 trips. Figures 28.4(b.i) and 28.4(b.ii) present the rotor speed and the
voltage at bus 32 for variable-speed turbines with (dotted line) and without (solid line)
terminal voltage or reactive power control. Figure 28.4 shows that constant-speed wind
turbines become unstable as a result of bus voltage decreases, whereas variable-speed
wind turbines stay connected. Further, it can be seen that wind turbines with terminal
voltage control behave more favourably than do wind turbines without voltage control,
because they attempt to bring the voltage back to its predisturbance value.
28.4.3.2 Response to a change in grid frequency
As discussed above, the mechanical and electrical behaviour of variable-speed wind
turbines is decoupled by power electronic converters. As a result, mechanical quantities,
such as rotor speed and mechanical power, are largely independent of electrical quan-
tities, such as active and reactive power and gen erator terminal voltage and frequency.
Therefore, the mechanical frequency of variable-speed wind turbines doe s not react to a
change in electrical grid frequency. The energy stored in the rotating mass of variable-
speed wind turbines is not released when the grid frequency drops. In practice, it is much
more likely that the frequency decreases than that it increases. To illustrate this effect,
the generators at buses 32, 36 and 37, generating 1750 MW, are replaced by wind farms.
This corresponds to a wind power penetration of about 28.5 %.
If wind turbines replace synchronous generators on such a large scale, the power from
the wind turbines has not only to replace the active power from the synchronous
generators but also to take on the other tasks carried out by the synchronous generators.
This refers mainly to the generation of reactive power and voltage control, as discussed
in Chapter 19. Otherwise, it will not be possible to keep the voltage at each bus within
the allowable deviation from its nominal value. The reason is that there are only limited
options for controlling the voltage if wind turbines replace conventional synchronous
generators. Therefore, this section studies only constant-speed wind turbi nes with SVCs,
and variable-speed wind turbines with terminal voltage controllers. Constant-speed
wind turbines without controllable reactive power source, and variable-speed wind
turbines running at unity power factor, are not taken into account: it is unreasonable
to look at the dynamic behaviour of a system that cannot be operated because of a lack
of voltage control possibilities.
Wind Power in Power Systems 641
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 642 – [629–652/24]
17.12.2004 10:51PM
(b) Variable-speed
1.2
1.0
0.8
0.6
0.4
0.2
0.0
Time (s)
Voltage (p.u.)
(ii)
0.0 0.5 1.0 1.5 2.0 3.0 3.52.5 4.0 4.5 5.0
0.99
0.98
0.97
0.96
0.95
Time (s)
Rotor speed (p.u.)
(i)
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
0.30
0.25
0.20
0.15
0.10
0.05
–0.05
0.00
Time (s)
Rotor speed (p.u.)
(a) Constant-speed
(i)
2.50.0 0.5 1.0 1.5 2.0 3.0 3.5 4.0 4.5 5.0
1.2
1.0
0.8
0.6
0.4
0.2
0.0
Time (s)
Voltage (p.u.)
(ii)
2.50.0 0.5 1.0 1.5 2.0 3.0 3.5 4.0 4.5 5.0
Figure 28.4 (i) Rotor speed and (ii) voltage at bus 32 for (a) constant-speed wind turbines and
(b) variable-speed wind turbines after the tripping of the synchronous generator at bus 31 (Figure
28.2). In part (b.ii), the dotted and solid lines correspond to variable-speed wind turbines operat-
ing at unity power factor or in terminal voltage control mode, respectively
642 Impacts on Power System Dynamics
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 643 – [629–652/24]
17.12.2004 10:51PM
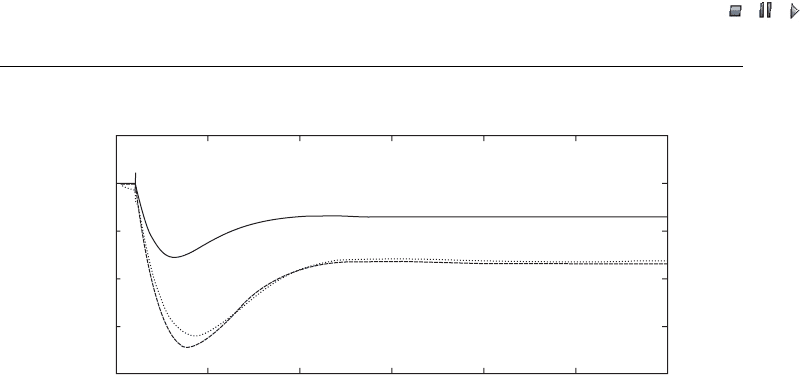
Figure 28.5 shows the simulation results for the case in which the synchronous
generator at bus 30, delivering 570 MW, trips. The solid line corresponds to the base
case, the dashed line to the case with variable-speed wind turbines, and the dotted line to
the case with constant-speed wind turbines. Figure 28.5 illustrates that the frequency
drop is both deeper and lasts longer for wind turbines than for synchronous generators.
As discussed above, the reason is that the wind turbines are not equipped with governors.
This is not possible either, because their prime mover is uncontrollable. Figure 28.5 also
shows that the frequency drop is deepest in the case of variable-speed wind turbines
because of the decoupling of electrical and mechanical quantities.
28.4.3.3 Rotor speed oscillations of synchronous generators
Now, we want to analyse the third effect of increasing wind turbine penetration in
electrical power systems; that is, possible changes in the damping of the rotor speed
oscillations of the remaining synchronous generators after a fault. Again, only constant-
speed wind turbines with SVCs, and variable-speed wind turbines with terminal voltage
controllers, are included in the analysis, because we assume a high wind energy penetra-
tion. It would be unreasonable to include here constant-speed wind turbines without
controllable reactive power source and variable-speed wind turbines at unity power factor.
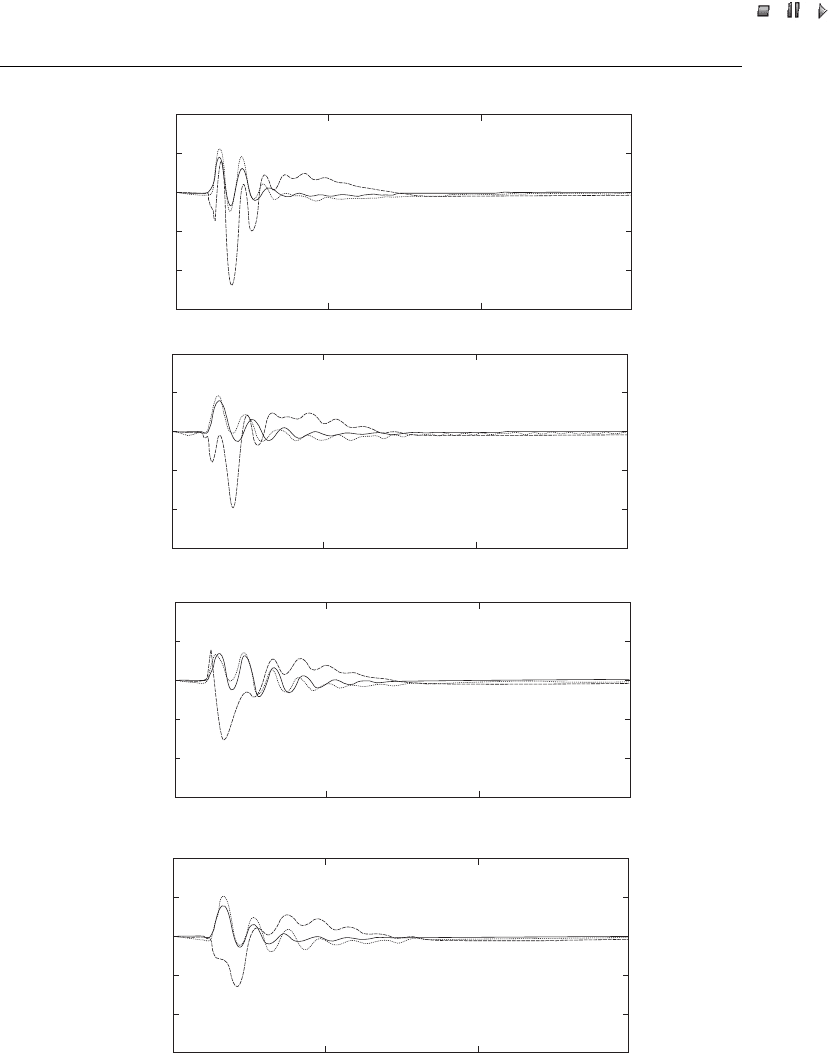
A 150 ms second fault is applied to bus 1. Figure 28.6 depicts the results (i.e. the rotor
speed of the synchronous generators at buses 30, 31, 35 and 38). The soli d line corre-
sponds to the base case, the dotted line to constant-speed wind turbines and the dashed
line to variable-speed wind turbines. This figure shows that the presence of the wind
turbines does not significantly affect the time constant of the damping of the oscillations
that occur after the fault. Although the oscillations have rather different shapes, the
2
–2
0
–4
–6
–8
0 5 10 15 20 3025
× 10
–3
Time (s)
Frequency deviation (p.u.)
Figure 28.5 Frequency drop after the tripping of the synchronous generator at bus 30 (Figure
28.2): base case (solid line) compared with wind farms with variable-speed wind turbines (dashed
line) and constant-speed wind turbines (dotted line) at buses 32, 36 and 37 (Figure 28.2),
corresponding to a wind power penetration level of 28.5 %
Wind Power in Power Systems 643
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 644 – [629–652/24]
17.12.2004 10:51PM
0.010
–0.010
–0.015
0.005
–0.005
0.000
010
0.010
–0.010
–0.015
0.005
–0.005
0.000
–0.010
0.005
–0.005
0.000
–0.015
01015
15
Time (s)
Time (s)
Rotor speed (p.u.)Rotor speed (p.u.) Rotor speed (p.u.)
(a)
(c)
(d)
5
5
01015
Time (s)
5
0.010
–0.010
–0.015
0.005
–0.005
0.000
01015
0.010
Time (s)
Rotor speed (p.u.)
(b)
5
Figure 28.6 Rotor speed oscillations of the synchronous generators at (a) bus 30, (b) bus 31,
(c) bus 35 and (d) bus 38 at a wind power penetration level of 28.5 %. The solid line corresponds to
the base case, the dotted line to constant-speed wind turbines and the dashed line to variable-speed
wind turbines
644 Impacts on Power System Dynamics

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 645 – [629–652/24]
17.12.2004 10:51PM
system remains stable and has in all cases returned to steady state after about 10 s.
Figure 28.6 also shows the following:
.
The shape of the oscillations changes when constant-speed wind turbines are
connected. This is probably caused by the shaft of the turbines. As already
pointed out, the shaft is relatively soft, resulting in a large angular displacement
between the shaft ends and in a significant amount of energy being stored in the
shaft. When the fault occurs, this energy is released and rotor speed increases
quickly. While the voltage is restored, the shaft causes an oscillation, as can be
seen in Figure 28.6.
.
With variable-speed wind turbines, the rotor speed of some of the generators
drops instead of increasing when a fault occurs. This is particularly true for
remote wind turbines. The reason is that the variable-speed wind turbines gen-
erate hardly any power during the fault and they need time to bring their power
back to the prefault value. In our simulation, this took 0.5 s after the terminal
voltage was restored to 80 % of the nominal value. During the fault, there is a
generation shortage, which causes the rotors of some of the synchronous gen-
erators to slow down rather than to speed up, which usually is the case during a
fault.
28.5 Impact of Wind Power on Small Signal Stability
28.5.1 Eigenvalue–frequency domain analysis
When analysing the small signal stability of a power system, the nonlinear equations
describing its behaviour are linearised. This means that the nonlinear equations are
approximated with a polynomial of which only the first-order (linear) terms are taken
into account, while neglecting the higher-order terms. The resulting equations can be
written in matrix notation and the eigenvalues of one of the matrices, the so-called state
matrix, give important information on the system’s dynamics. The reader is referred to
textbooks on this topic for a more formal, mathematical treatment of the linearisation
of a power system (Kundur, 1994).
As mentioned in Section 28.2, the information that the eigenvalues contain is valid
only for the actual state of the system and when the disturbance that elicits a response
of the system is small. This can be explained as follows. Because a power system is
nonlinear, its response to a certain disturbance depends on its operating point. This
also applies to the eigenvalues, which describe the system’s response and will change
accordingly when the system’s response changes. Thus, the results of the linearisation
depend on the initial operating point: a linearisation of another operating point would
yield different eigenvalues. Further, if a large disturbance is applied to the power
system, the contribution of the nonlinearities that have been neglected in the linearisa-
tion becomes substantial and the assumptions on which linearisation is based are no
longer valid. The study of the response of the power system to large disturbances, such
as faults or unit trips, requires time domain simulations rather than frequency domain
simulations.
Wind Power in Power Systems 645

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 646 – [629–652/24]
17.12.2004 10:51PM
28.5.2 Analysis of the impact of wind power on small signal stability
Power system oscillations have been studied in many contexts. Examples are the impact
of HVDC links and their controllers on power syst em oscillations, the impact of long-
distance power transmission and the damping of power system oscillations by means of
flexible AC transmission systems (FACTS). However, in the literature there are no
studies that investigate the impact of wind power on power system oscillations. There-
fore, at this stage it is not possible to arrive at detailed conclusions regarding the impact
of wind power on power systems. We will therefore present a qualitative analysis and
some preliminary conclusions. It should be stressed, though, that further research is
necessary.
In synchrono us generators, the electrical torque depends mainly on the angle between
rotor and stator flux. This angle is the integral of the rotational speed difference between
these two fluxes which in turn depends on the difference between electrical and mechan-
ical torque. This makes the mechanical part of the synchronous machine a second-order
system that intrinsically shows oscillatory behaviour. Further, small changes in rotor
speed are unlikely to affect the electrical torque de veloped by the machine, as they lead
to hardly any chan ge in rotor angle. Therefore, the damping of rotor speed oscillations
must come from other sources, such as damper windings, the exciter and the rest of the
power system.
Relatively weak links an d large concentrations of synchronous generators contribute
to the risk of weakly damped or undamped oscillations (Kundur, 1994; Rogers, 1996).
The reason is that if a synchronous generator is large compared with the scale of the
system as a whole and/or if it is weakly coupled the contribution of the rest of the system
to the damping torque diminishes and thus the damping of oscillations deteriorates. The
oscillation of a generator that is large compared with the system will also affect other
generators, thus spreading the oscillation through the system and giving rise to power
system oscillations that comprise a number of generators that oscillate against each
other. The lower the frequency, the less damping pro vided by the damper windings.
Power system oscillations can have frequencies of about 1 Hz and lower, so that hardly
any damping is provided by the damper windings.
The generator types used in wind turbines rarely if even engage in power system
oscillations. Squirrel cage induction generators used in constant-speed wind turbines
show a correlation between rotor slip (i.e. rotor speed) and electrical torque instead of
between rotor angle and electrical torque, as in the case of synchronous generators. The
mechanical part is therefore of first order and does not show oscillatory behaviour, as
opposed to that of a synchrono us generator. Although an oscillation can be noticed
when including the rotor transients in the model, as this increases the model order, this
oscillation is small and well damped. Thus, squirrel cage induction generators are
intrinsically better damped and rely less than do synchronous generators on the power
system to provide damping and thus rarely lead to power system oscillations.
The generator types used in variable-speed wind turbines are decoupled from the
power system by power electronic converters that control the rotor speed and electrical
power and damp any rotor speed oscillations that may occur. Variable-spee d wind
turbines do not react to any oscillations in the power system either. The generator does
not ‘notice’ them, as they are not transferred through the converter.
646 Impacts on Power System Dynamics
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 647 – [629–652/24]
17.12.2004 10:51PM
This analysis shows that if wind power is assumed to replace the power generated by
synchronous generators, these synchrono us generators contribute less to cover the
power demand. The topology of the system remains unchanged, though. Thus, the
synchronous generators become smaller in propo rtion to the impedances of the grid.
This strengthens the mutual coupling, which in most cases improves the damping of any
oscillation between the synchronous generators. Hence, replacing synchronous genera-
tors with wind turbines can be expected to improve the damping of power system
oscillations.
28.5.3 Simulation results
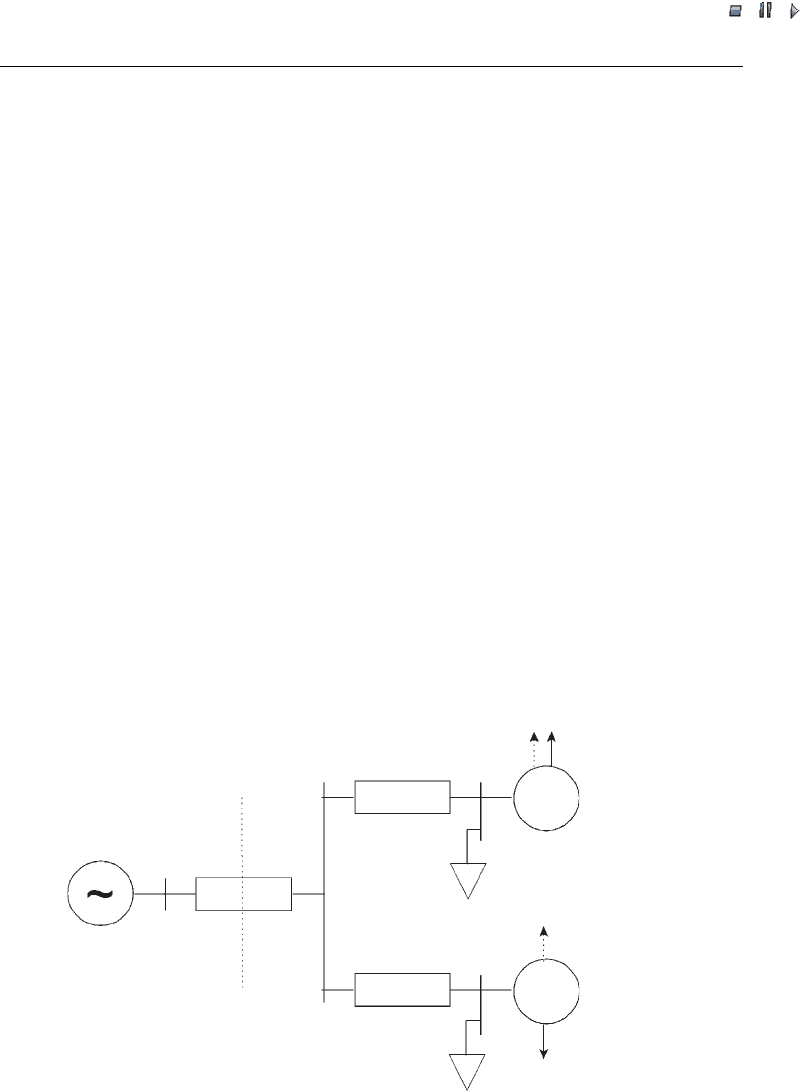
This section shows some of the simulation results. A small test system was developed in
order to analyse the impact of wind power on the eigenvalues of a power system. Figure
28.7 depicts the test system. It consists of two areas, one with a large, strongly coupled
system, represented by an infinite bus, and the other one co nsisting of two synchronous
generators. The impedances are in per unit (p.u.) on a 2500 MVA base and the loads are
modelled as constant MVA. This test system shows an oscillation of a grou p of
generators against a strong system and an intra-area oscillation. The generators at buses
3 and 4 oscillate against the strong system, and generators 3 and 4 oscillate against each
other. The shapes of these oscillatory modes are also depicted in Figure 28.7. In order to
analyse the impact of an inter-area power flow, the loads were increased to 3000 MW
without changing the output power of the generators.
Infinite bus
U = 1.025 p.u.
Bus 1
Bus 2
0.10 + 1.0j
Area 1 Area 2
0.01 + 0.1j
0.01 + 0.1j
Bus 3
Bus 4
2500 MW
2500
MW
Generator
P = 2500 MW
U = 1.025 p.u.
Generator
P
= 2500 MW
U = 1.025 p.u.
Figure 28.7 Test system with two generators, the oscillatory modes are indicated by arrows:
oscillation of a group of generators (dotted-line arrows), and intra-area oscillation (solid-line
arrows). Note: U ¼voltage; P ¼active power
Wind Power in Power Systems 647

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 648 – [629–652/24]
17.12.2004 10:51PM
The load flow scenarios used to study the three oscillation types are developed in the
following way:
.
One or more buses to which a synchronous generator involved in the oscillatory mode
to be studied is connected are selected. The buses are selected according to the scenario
that is being studied. The analysis includes scenarios in which generators in only one of
the two swing nodes are gradually replaced by wind power as well as scenarios in which
generators in both swing nodes are gradually replaced by wind power.
.
An aggregated model of a wind farm with either constant-speed or variable-speed
wind turbines is connected to the selected buses.
.
The active power, reactive power capability and MVA rating of the selected synchro-
nous generator(s) are gradually reduced. The reduction in active power is compen-
sated by increasing the power generated by the wind farm, the MVA of which rating is
increased accordingly. The reduction in reactive power generation, if any, is not
compensated for.
In order to calculate the eigenvalues for each of the scenarios, the load flow cases
are solved and dynamic models of the synchronous generators and the wind farm(s)
are attached. The resulting dynamic model of the investigated scenario is then line-
arised and the eigenvalues of the state matrix are calculated as described above. In
this way, we can show the trajectory of the eigenvalues in the complex plane with
changing wind power penetration. This provides information on the oscillatory
behaviour.
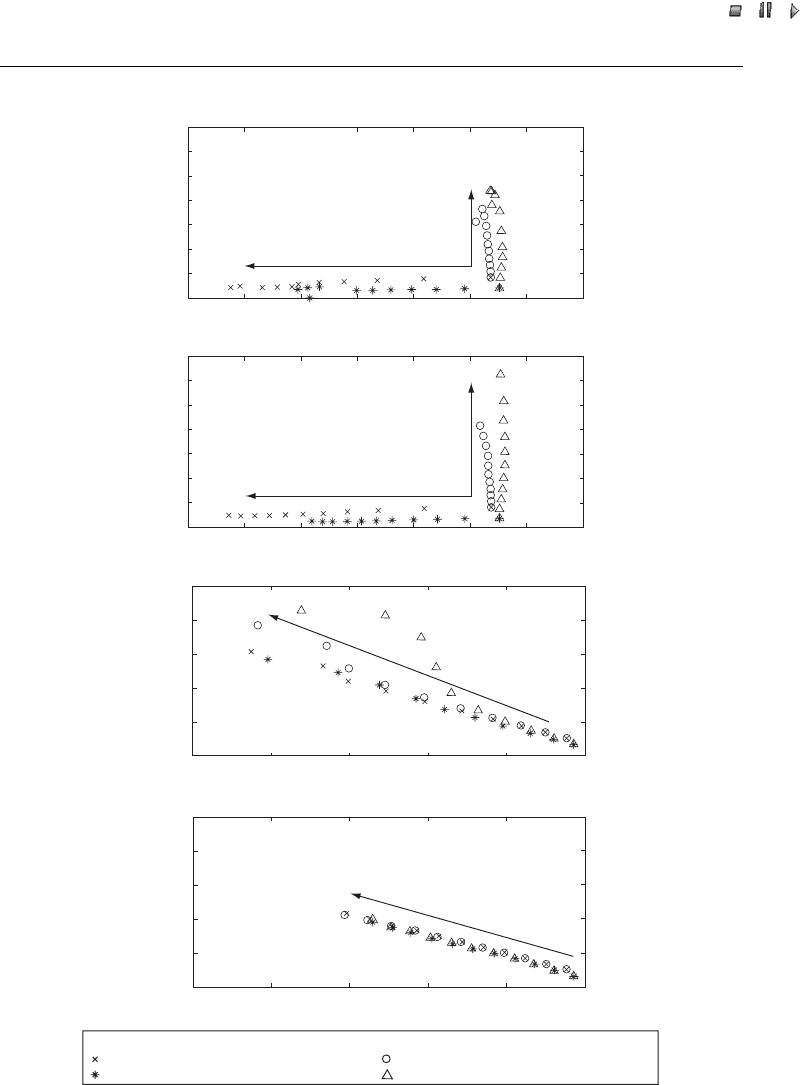
Figure 28.8 depicts the results. In both Figu re 28.8(a) and Figure 28.8(b) the
damping ratio is indicated on the horizontal axis and the oscillation frequency on
the vertical axis. The upper graphs Figures 28.8(a.i) and 28.8(b.i) show the eigenvalues
that correspond to one wind farm, at bus 3. The lower graphs Figures 28.8(a.ii) and
28.8(b.ii) depict the eigenvalues that correspond to two wind farms, at buses 3 and 4.
The direction in which the eigenvalues move with increasing wind power penetration is
indicated by an arrow.
28.5.4 Preliminary conclusions
The analysis and the simulation results presented in Sections 28.5.2 and 28.5.3 show that
replacing synchronou s generators with wind power tends to improve the damping of
oscillations of a (group of coherent) generator(s) against a strong system and the
damping of inter-area oscillations, particularly if constant-speed wind turbines are used.
The effect on intra-area oscillations seems to be insignificant.
The reason for the damping effect of wind power is that the remaining synchronous
generators connected to the system become proportionally smal ler and therefore more
strongly coupled. However, wind power itself does not induce new oscillatory modes,
because the generator types used in wind turbines do not engage in power system
oscillations. Oscillations in squirrel cage induction generators that are used in
constant-speed wind turbines are intrinsically better damped, and the generators of
variable-speed wind turbines are decoupled from the power system by a power electro-
nic converter, which controls the power flow and prevents them from engaging in power
system oscillations.
648 Impacts on Power System Dynamics
//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 649 – [629–652/24]
17.12.2004 10:51PM
Constant-speed turbines, no inter-area flow
Constant-speed turbines, inter-area flow
Variable-speed turbines, no inter-area flow
Variable-speed turbines, inter-area flow
Legend
1.65
1.60
1.55
1.50
1.45
1.40
Oscillation frequency (Hz)
1.65
1.60
1.55
1.50
1.45
1.40
Oscillation frequency (Hz)
Damping ratio
Damping ratio
–0.125 –0.12 –0.115 –0.11 –0.105 –0.1
–0.125 –0.12
–0.115
–0.11
–0.105
–0.1
(ii) Wind parks at buses 3 and 4
(i) Wind park at bus 3
(b)
1.2
1.1
1.0
0.9
0.8
0.7
0.6
0.5
(i) Wind park at bus 3
Oscillation frequency (Hz)
–0.14 –0.12 –0.10 –0.08 –0.06 –0.04 –0.02 0.00
1.2
1.1
1.0
0.9
0.8
0.7
0.6
0.5
(ii) Wind park at buses 3 and 4
Oscillation frequency (Hz)
–0.14 –0.12 –0.10 –0.08 –0.06 –0.04 –0.02 0.00
Damping ratio
Damping ratio
(a)
Figure 28.8 (a) Impact of increasing wind power penetration on the oscillation of the generators at
buses 3 and 4 against the infinite bus: (i) the eigenvalues with a wind farm at bus 3; (ii) the
eigenvalues with two wind farms, at buses 3 and 4 (b) Impact of increasing wind power penetration
on the intra-area oscillation of the generators at buses 3 and 4 against each other: (i) the eigenvalues
with a wind farm at bus 3; (ii) the eigenvalues with two wind farms, at buses 3 and 4. The direction of
the arrows indicates increasing wind power penetration; for the test system, see Figure 28.7
Wind Power in Power Systems 649

//INTEGRAS/KCG/P AGIN ATION/ WILEY /WPS /FINALS_1 4-12- 04/0470855088_ 29_CHA28 .3D – 650 – [629–652/24]
17.12.2004 10:51PM
When a very large part of the synchronous generation capacity in a swing node is
replaced with wind power, the results become ambiguous in some cases. This is probably
caused by the fact that the mode shape changes, which can also change the oscillation
type.
We have used theoretical insights regarding the origin and mitigation of power system
oscillations to explain our observations. More detailed analyses of other power systems
can be expected to yield similar results. The results presented here are mainly qualitative.
Computations with other power systems will be required to confirm the obtained results
and determine whether it is possible to quantify the impact of wind power on power
system oscillations.
28.6 Conclusions
This chapter discussed the impact of wind power on the dynamics of power systems. The
reasons for investigating this topic are that the dynamics of a power system are governed
mainly by the generators. Thus, if conventional power generation with synchronous
generators is on a large scale replaced with wind turbines that use either asynchronous
squirrel cage induction generators or variable-speed generation systems with power
electronics, the dynamics of the power system will at some point be affected, and
perhaps its stability, too.
The main conclusion of this chapter is that although wind turbines indeed affe ct the
transient and small signal dynamics of a power system, power system dynamics and
stability are not a principal obstacle to increasing the penetration of wind power. By
taking adequate measures, the stability of a power system can be maintained while
increasing the wind power penetration.
In the case of constant-speed wind turbines, measures must be taken to prevent voltage
and rotor speed instability in order to maintain transient stability. This can be done by
equipping them with pitch controllers in order to reduce the amount of overspeeding that
occurs during a fault; by combining them with a source of reactive power to supply the
large amount of reactive power consumed by a squirrel cage generator after a fault, such
as a STATCON or SVC; or by changing the mechanical and/or electrical parameters of
the turbine. In the case of variable-speed wind turbines, the sensitivity of the power
electronic converter to overcurrents will have to be counteracted in another way than is
presently done, namely, by switching off the turbine. However, the literature seems to
indicate that there may indeed be other options.
The small signal stability was studied here using the eigenvalues obtained from the
linear analysis. Increased levels of wind power penetration do not seem to req uire any
additional measures in order to maint ain small signal stabili ty. The generator type that
is most likely to engage into power system oscillations is the synchronous generator, and
that generator type is not used in the wind turbine types that are presently on the
market. Therefore, replac ing synchronous generation seems to have either a negligible
or a favourable impact on power syst em oscillations. However, the impact of wind
power on the small signal stability of power systems is a rather recent research subject.
Hence, results are still very limited. The conclusions we have presented here should
therefore be considered preliminary and be used prudently.
650 Impacts on Power System Dynamics