ТулГУ, Тула, 2012г. 13стр.
В работе решены следующие задания по нелинейной теории упругости:
Часть №
1.
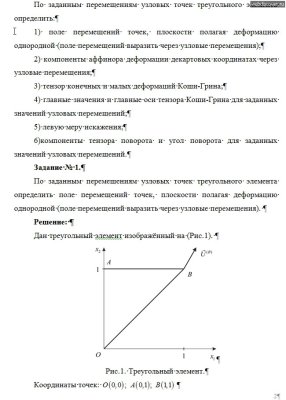
По заданным перемещениям узловых точек треугольного элемента определить:
1) поле перемещений точек, плоскости полагая деформацию однородной (поле перемещений выразить через узловые перемещения);
2) компоненты аффинора деформации декартовых координатах через узловые перемещения;
3) тензор конечных и малых деформаций Коши-Грина;
4) главные значения и главные оси тензора Коши-Грина для заданных значений узловых перемещений;
5) левую меру искажения;
6) компоненты тензора поворота и угол поворота для заданных значений узловых перемещений.
Часть №2
1) Используя принцип возможных перемещений найти связи между компонентами тензора и компонентами активных внешних узловых сил;
2) Найти связь между компонентами тензора энергетических напряжений и узловыми перемещениями элемента (используя для этого связь между тензором истинных напряжений и деформации принять в форме закона Гука) для случая плоского состояния ;
3) Линеаризовать полученную систему и определить связь между перемещениями и узловыми силами для линеаризованной системы.
В работе решены следующие задания по нелинейной теории упругости:
Часть №
1.
По заданным перемещениям узловых точек треугольного элемента определить:
1) поле перемещений точек, плоскости полагая деформацию однородной (поле перемещений выразить через узловые перемещения);
2) компоненты аффинора деформации декартовых координатах через узловые перемещения;
3) тензор конечных и малых деформаций Коши-Грина;
4) главные значения и главные оси тензора Коши-Грина для заданных значений узловых перемещений;
5) левую меру искажения;
6) компоненты тензора поворота и угол поворота для заданных значений узловых перемещений.
Часть №2
1) Используя принцип возможных перемещений найти связи между компонентами тензора и компонентами активных внешних узловых сил;
2) Найти связь между компонентами тензора энергетических напряжений и узловыми перемещениями элемента (используя для этого связь между тензором истинных напряжений и деформации принять в форме закона Гука) для случая плоского состояния ;
3) Линеаризовать полученную систему и определить связь между перемещениями и узловыми силами для линеаризованной системы.