Yang J., Nanni L. (eds.) State of the Art in Biometrics
Подождите немного. Документ загружается.

Fingerprint Matching using A Hybr id Shape and Orientation Descriptor 15
3.1.2 Similarity score
Once the n iterations are performed, the final pairs have now been established. From this, the
shape similarity distance measure can be calculated as
D
sc
(P, Q)=
1
n
∑
p∈P
arg min
q∈Q
C(p, T(q)) +
1
m
∑
q∈Q
arg min
p∈P
C(p, T(q)) (47)
where T
(.) denotes the T.P.S transformed representative of the contour point q. In addition, an
appearance term, D
ac
(P, Q), measuring pixel intensity similarity and a bending energy term,
D
be
(P, Q)=I
f
, can be added to the similarity score.
Afterward, the similarity measure was modified as
D
∗
sc
= D
sc
+ βD
be
. (48)
Although this measure does not take into account the strict one-to-one mapping of minutiae;
through experimentation, this method proved to be sound, providing acceptable performance
in fingerprint similarity assessment. However, the resulting minutiae mapping from the
application of the Hungarian algorithm on the contextually based cost histograms produced
some un-natural pairs, as illustrated in Figure 8 (top). This is due to the lack of a minutiae
pair pruning procedure. The existence of un-natural pairs could potentially skew the Thin
Plate Spline (T.P.S) linear transform performed. In addition, such pairs generally increase
the bending energy substantially, thus leading to invalid matching results, particularly for
genuine matches.
3.2 Proposed matching method
Recently, hybrid matching algorithms have been used for fingerprint matching. Although
minutiae detail alone can produce a highly discriminant set of information, the combination
of level 1 feature, such as orientation and frequency, and other level features, can
increase discriminant information, and hence, increase matching accuracy, as illustrated in
Benhammadi et al. (2007), Youssif et al. (2007), Reisman et al. (2002), and Qi et al. (2004).
The detailing of the proposed hybrid matching algorithm based on a modified version of
the enhanced shape context method in Kwan et al. (2006), along with the integration of
the orientation-based descriptor of Tico & Kuosmanen (2003) is given here, illustrating a
significant performance improvement over the enhanced shape context method of Kwan et al.
(2006). The main objective of the integration is two-fold, firstly to prune outlier minutiae pairs,
and secondly to provide more information to use in similarity assessment.
As briefly described earlier in section 2.3, the orientation-based descriptor in Tico &
Kuosmanen (2003) utilises the orientation image to provided local samples of orientation
around minutiae in a concentric layout. Each orientation sample point is calculated as
θ
A
i
c,d
= min(|θ
s
A
c,d
−θ
A
i
|, π −|θ
s
A
c,d
−θ
A
i
|) (49)
being the d
th
sample on the c
th
concentric circle with distance r
c
away from the minutiae
point m
A
i
, where θ
A
i
and θ
s
A
c,d
are the minutia and sample point orientation estimations,
respectively. The orientation distance of equation 22 is used to prune outlier pairs resulting
from the Hungarian algorithm which produced the mapping permutation of equation 30.
Although the shape context defines the similarity measure in equation 47-48 with no strict
one-to-one correspondence, minutiae should have a more strict assessment based on the
optimal mapping, since minutiae are key landmarks as opposed to randomly sampled contour
39
Fingerprint Matching using A Hybrid Shape and Orientation Descriptor
16 Will-be-set-by-IN-TECH
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0
.1
0
.2
0
.3
0
.4
0
.5
0
.6
0
.7
0
.8
0
.9
28 correspondences (unwarped X)
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0
.1
0
.2
0
.3
0
.4
0
.5
0
.6
0
.7
0
.8
0
.9
28 correspondences (warped X)
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0
.1
0
.2
0
.3
0
.4
0
.5
0
.6
0
.7
0
.8
0
.9
28 correspondences (warped X)
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0
.1
0
.2
0
.3
0
.4
0
.5
0
.6
0
.7
0
.8
0
.9
18 correspondences (warped X)
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0
.1
0
.2
0
.3
0
.4
0
.5
0
.6
0
.7
0
.8
0
.9
19 correspondences (warped X)
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0
.1
0
.2
0
.3
0
.4
0
.5
0
.6
0
.7
0
.8
0
.9
19 correspondences (warped X)
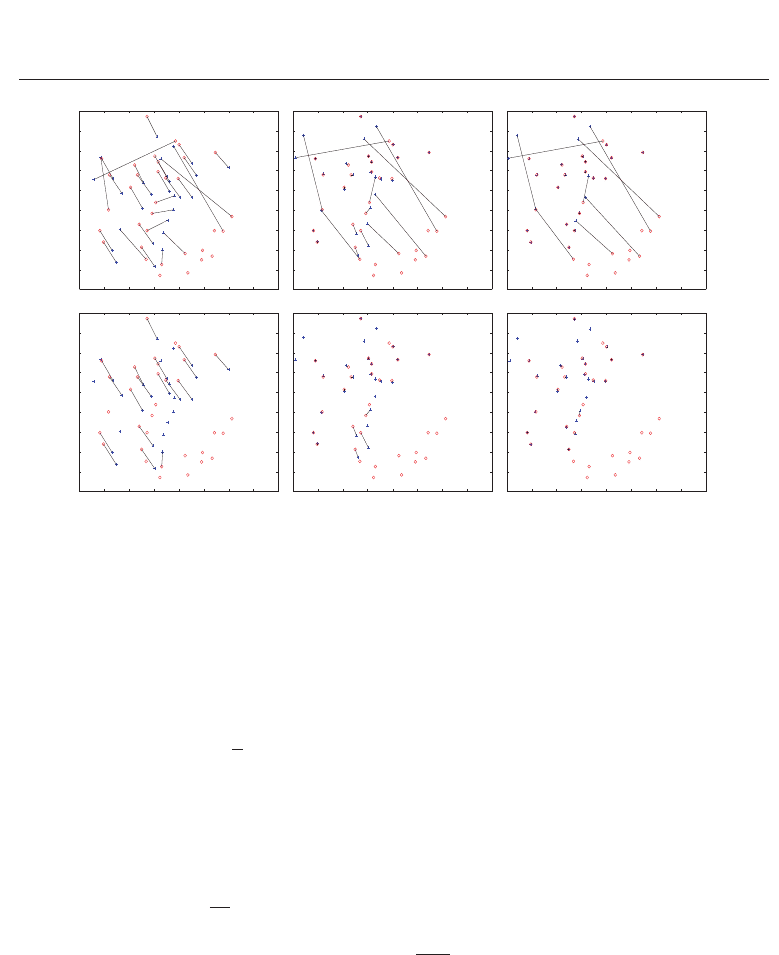
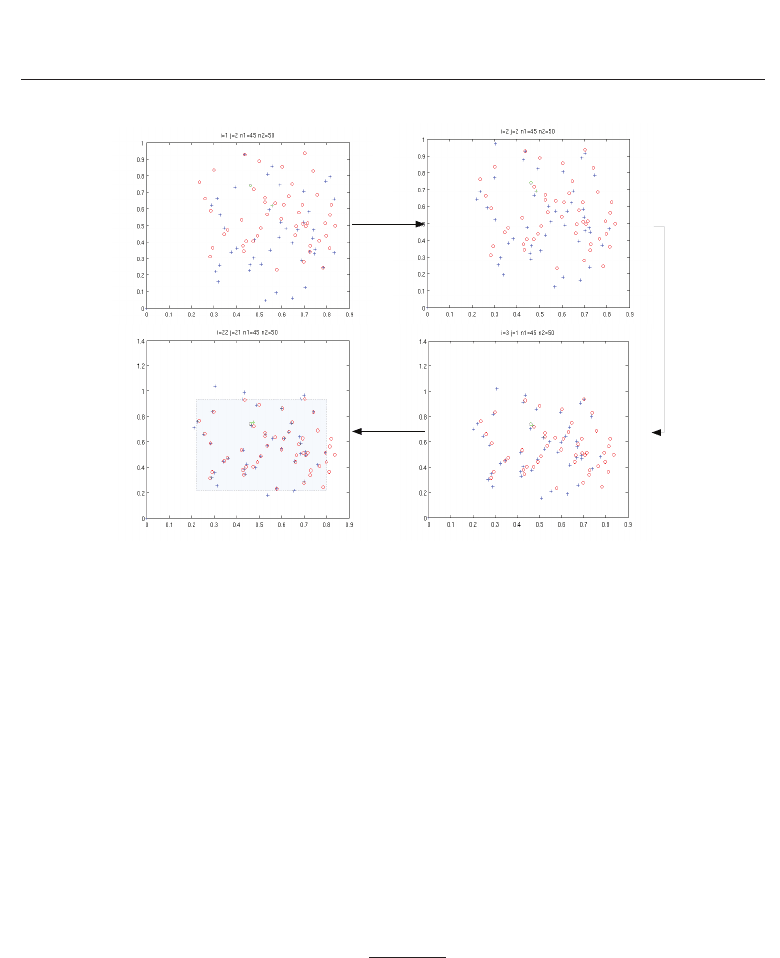
Fig. 8. top: The Enhanced Shape Context method producing initial minutiae pair
correspondences. The next two images are for the following iterations. One should note that
there are some clear un-natural pairs produced, where plate foldings are evident (i.e. pair
correspondences that cross other pair correspondences). bottom: The proposed hybrid
method initial minutiae pair correspondences along with following iterations of produced
correspondences.
points. Thus, equation 48 can be modified to only score the pairs with the optimal one-to-one
mapping as
D
∗∗
sc
(P, Q)=
1
n
∑
p
i
∈P|D
o
(p
i
,q
π(i)
)<δ
C(p
i
, q
π(i)
)+ΛD
o
(p
i
, q
π(i)
)+βD
be
(50)
with an addition term in the summation to account for orientation distance scaled by the
tunable parameter, Λ with range
[0, 1 ].
In terms of what concentric circle radii and sample configuration should be used, the method
explained in Tico & Kuosmanen (2003) prescribes that the radius for circle K
l
be r
l
= 2l × τ,
where τ denotes the average ridge period, and for the sample configuration, the circle K
l
should have roughly
πr
l
τ
. As the average ridge period was recorded to be 0.463 mm in
Stoney (1988), for a fingerprint image with dots per inch (dpi) equal to R, the previous formula
for the configuration can be expressed as K
l
=
172.r
l
R
. However, this was really only used
as a rough guide for the configuration used in the experimentation of Tico & Kuosmanen
(2003). This was also used as a rough guide for our implementation of the orientation-based
descriptor.
Although the log-polar space adequately provides extra importance toward neighbouring
sample points, additional emphasis on local points may be desirable, since minutiae sets are
largely incomplete and do not entirely overlap. For a given minutia, non-local bin regions may
be partially or largely outside the segmented region of interest for one fingerprint and not the
other. In addition, the non-local bins are spatially larger, and hence, have a higher probability
40
State of the Art in Biometrics
Fingerprint Matching using A Hybr id Shape and Orientation Descriptor 17
of containing false minutia caused by noises. Such issues can potentially result in incorrect
minutiae pairs. Thus, the enhanced shape context’s log-polar histogram cost in equation 27 is
adjusted to contain a tunable Gaussian weighting of histogram bin totals, depending on their
distances away from the centre (reference minutia), with
C
∗∗
(p
i
, q
j
)=
1
−γC
ty pe
ij
C
angl e
ij
.
⎛
⎜
⎝
1
2
K
∑
k=1
h
p
i
(k) −h
q
j
(k)
2
h
p
i
(k)+h
q
j
(k)
×
exp
−
(
r
k
−r
min
)
2
2σ
2
⎞
⎟
⎠
(51)
where r
min
is the outer boundary of the closest bin, r
k
is the current bin outer boundary
distance, and σ
2
is a tunable parameter (see Figure 9).
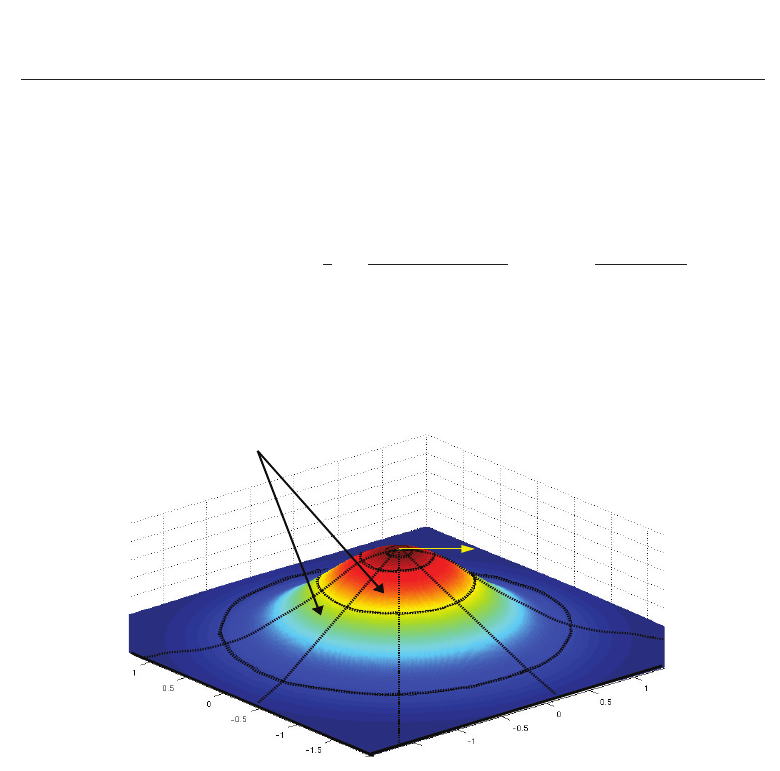
Fig. 9. The log-polar sample space convolved with a two dimensional Gaussian kernel,
resulting in each bin to be weighted according to its distance from the origin (minutia). The
histogram cost calculation uses the direction of the reference minutia as the directional offset
for the bin order, making the descriptor invariant to rotation.
3.2.1 Adaptive greedy registration
If we re-examine the registration of the enhanced shape context method of Kwan et al. (2006)
discussed in section 3.1, we can summarise the iterative process as updating minutiae pairs
with the enhanced shape context descriptor, followed by using T.P.S to perform a global
alignment with the linear transform component, and then performing non-linear transform
to model warping caused by skin elasticity. This method does not utilise any singularities
for the registration process, solely relying on the T.P.S framework for registration. Hence,
registration is largely reliant on the accuracy of the spatial distribution of minutiae relative to
a given reference minutia, which is often inadequate.
The proposed method does not use the T.P.S transform to perform the initial affine transform.
Instead, a greedy method similar to Tico & Kuosmanen (2003) (of equations 20-23) is used.
41
Fingerprint Matching using A Hybrid Shape and Orientation Descriptor

18 Will-be-set-by-IN-TECH
Using the minutiae set representation of equations 3 and 4, each possible pair (m
A
i
, m
B
j
) of
the affine transform, T, is calculated by using the orientation differences of each minutiae
direction as the rotation component, and the difference in x-y coordinates as the offset
component (as illustrated in equations 7-9). The heuristic that requires maximising is
H
(A, B)=arg max
ψ
∑
i
S(m
A
i
, m
B
T(i)
)
n(Φ
ψ
)
(52)
where S
(.) is previously defined in equation 22 as the similarity function based on the
orientation-based descriptor, ψ is the index pair reference for the transform T (i.e.
(i, j) with
m
A
i
= m
B
T(j)
), Φ
ψ
is the anchor point set (with size n(Φ
ψ
)) of minutiae pairs (m
A
p
, m
B
q
) ∈ Φ
ψ
which have each other as closest points from the opposite minutiae sets with distance less
than an empirically set limit, δ
M
, after applying the given transform. In addition, all anchor
point minutiae pairs must have similar orientation, hence meeting the constraint
min
|θ
A
i
−θ
B
j
|, π −|θ
A
i
−θ
B
j
|
< δ
θ
(53)
(see Figure 5 left). From the given definition, we can easily verify that
(i, j) ∈ Φ
ψ
.
If the primary core point exists in both the test and template feature sets, provided that the
core point detection is highly accurate with a given test dataset, then we have good reason to
ignore affine transforms that cause the core points to be greater than a fixed distance, δ
D
, away
from each other. Additional pruning can be achieved by only allowing transforms where the
reference minutiae pair has a orientation-based descriptor similarity score to meet
S
p
i
, q
π(i)
< δ
S
(54)
where δ
S
is empirically set. Such restrictions will not only improve performance, but also
make the registration process much more accurate, since we are not just blindly maximising
the heuristic of equation 52.
Many registration algorithms use singularities, texture, and minutiae pair information as
tools for finding the most likely alignment. However, the overlapped region shape similarity
retrieved from minutiae spatial distribution information provides an additional important
criteria. After finding the bounding box (overlapping region) of a possible affine transform
meeting all prior restrictions, we can then measure shape dissimilarity via the application of
the shape context to all interior points P
⊆ A and Q ⊆ B with equation 50, giving additional
criteria for affine transforms to meet D
sc
(P, Q) < δ
sc
for an empirically set threshold, δ
sc
.
For a candidate transform, we have the corresponding anchor point set Φ
ψ
. We will now
define two additional nearest neighbour sets of the interior points in the overlap region (as
depicted in Figure 10) as
Φ
α
=
i
|
(x
A
i
− x
B
j
)
2
+(y
A
i
−y
B
j
)
2
< δ
N
(55)
where Φ
α
contains all interior nearest neighbour indices from fingerprint A, and likewise, Φ
β
,
containing interior nearest neighbour indices for fingerprint B . Thus, we have
Φ
ψ
⊆
(i, j) | i ∈ Φ
α
and j ∈ Φ
β
. (56)
with 1
≤ i ≤ p and 1 ≤ j ≤ q. The affine transform method is detailed in algorithm 1.
If a candidate affine transform meets the heuristic of equation 52 with the given constraints,
42
State of the Art in Biometrics

Fingerprint Matching using A Hybr id Shape and Orientation Descriptor 19
Algorithm 1 Proposed registration algorithm (Affine component)
Require: minutiae set P and Q (representing fingerprints A and B, respectively).
H
← 0
ψ
←NIL
Φ
ψ
←NIL
Q
T
←NIL
for all possible minutiae pairs
p
i
, q
j
do
S
p
i
, q
j
← (1/K)
∑
L
c
∑
K
c
d
exp
−
2
min(|θ
p
i
c,d
−θ
q
j
c,d
|,π−|θ
p
i
c,d
−θ
q
j
c,d
|)
πμ
!
if S
p
i
, q
j
< δ
S
then
continue
end if
{Perform transform from minutiae pair with offset and orientation parameters from
minutiae x-y and θ differences}
Q
← T(Q)
{Make sure core points are roughly around the same region, provided both cores exist}
if BothCoresE xist
(P, Q
) and CoreDist(P, Q
) > δ
D
then
continue
end if
{Get T.P.S cost matrix (see algorithm 2)}
C
∗∗
← TPS
cost
(P, Q
)
D
sc
←
1
n
∑
p∈P
arg min
q∈Q
C
∗∗
(p, q)+
1
m
∑
q∈Q
arg min
p∈P
C
∗∗
(p, q)
if D
sc
> δ
sc
then
continue
end if
Φ
ψ
P
←
(a, b) | arg min
a∈P
(x
A
a
− x
B
b
)
2
+(y
A
a
−y
B
b
)
2
Φ
ψ
Q
←
(a, b) | arg min
b∈Q
(x
A
a
− x
B
b
)
2
+(y
A
a
−y
B
b
)
2
Φ
ψ
←
(a, b) | (a, b) ∈ Φ
ψ
P
∩Φ
ψ
Q
and
(x
A
i
− x
B
j
)
2
+(y
A
i
−y
B
j
)
2
< δ
M
H
test
←
∑
(a,b)∈Φ
ψ
S(p
a
,T(q
b
))
n(Φ
ψ
)
if H
test
> H then
H
← H
test
ψ ← (i, j)
Φ
ψ
← Φ
ψ
Q
T
← Q
end if
end for
Φ
α
←
i
|
(x
A
i
− x
B
j
)
2
+(y
A
i
−y
B
j
)
2
< δ
N
Φ
β
←
j
|
(x
A
i
− x
B
j
)
2
+(y
A
i
−y
B
j
)
2
< δ
N
return Φ
ψ
, Φ
α
, Φ
β
, Q
T
43
Fingerprint Matching using A Hybrid Shape and Orientation Descriptor
20 Will-be-set-by-IN-TECH
Algorithm 2 TPS
cost
: Calculate TPS cost matrix
Require: minutiae set P and Q (representing fingerprints A and B, respectively).
for all minutiae q
j
∈ Q do
for k
= 1toK do
h
q
j
(k) ← #
q
j
= q
i
: (q
j
−q
i
) ∈ bin(k)
end for
end for
for all minutiae p
i
∈ P do
for k
= 1toK do
h
p
i
(k) ← #
p
j
= p
i
: (p
j
− p
i
) ∈ bin(k)
end for
end for
for all minutiae p
i
∈ P and q
j
∈ Q do
C
ty pe
ij
←
−1iftype(p
i
)=type(q
j
),
0ifty pe
(p
i
) = ty pe(q
j
)
C
angl e
ij
←−
1
2
1
+ cos((∠
initial−w arped
))
C
∗∗
(p
i
, q
j
) ←
1
−γC
ty pe
ij
C
angl e
ij
.
1
2
∑
K
k
=1
h
p
i
(k)−h
q
j
(k)
2
h
p
i
(k)+h
q
j
(k)
×exp
−
(r
k
−r
min
)
2
2σ
2
!
end for
return C
∗∗
we can then focus on the non-affine aspect of registration. The T.P.S non-affine component
adequately modeled the warping caused by skin elasticity in the previously proposed method.
With this in mind, it will be desirable to utilise the non-linear component.
The T.P.S has its point correspondence method modified through having anchor point
correspondences remain static throughout the iterative process, thus attempting to restrict
the affine transform component of T.P.S while finding new correspondences from Φ
α
on to
Φ
β
that do not exist in Φ
ψ
. The shape context’s log-polar histogram cost is modified from
equation 51 as
C
γ
(p
i
, q
j
)=γ
d
γ
θ
C
∗∗
(p
i
, q
j
) (57)
where γ
d
is defined as
γ
d
=
1ifdist
(p
i
, q
j
) < δ
max
,
∞ otherwise
(58)
with δ
max
set as the maximum feasible distance caused by warping after applying the
candidate affine transform, and similarly, γ
θ
, is defined as
γ
θ
=
1 if min
(|θ
A
i
−θ
B
j
|, π −|θ
A
i
−θ
B
j
|) < θ
max
,
∞ otherwise
(59)
with θ
max
set as the maximum feasible orientation difference caused by orientation estimation
error in the extraction process.
44
State of the Art in Biometrics
Fingerprint Matching using A Hybr id Shape and Orientation Descriptor 21
Fig. 10. An example affine transform candidate search sequence with final state and
corresponding bounding box for the overlapped region.
>From the new cost function, the Hungarian algorithm is then used to find additional
one-to-one correspondences to what already existed in the anchor point set. The candidate
affine transform in comparison to the affine component of T.P.S,
A
T
=
⎡
⎣
a
x,x
a
x,y
a
1,x
a
y,x
a
y,y
a
1,y
001
⎤
⎦
, (60)
is used to assess the accuracy of the additional correspondences found. The T.P.S affine
component would not have prominent translation, rotation, and shear parameters since
the candidate transform should have already adequately dealt with the affine registration
task as the Euclidean constraints on the anchor point worked to keep the global transform
rigid. In addition, the inclusion of additional natural minutiae correspondences should not
significantly alter the affine registration required. Thus, the lack of prominent translation,
rotation, and shear parameters for the T.P.S affine transform indicates an existing agreement
between both affine transforms. Evaluation of the translation distance is given by
r
affine
=
a
2
1,x
+ a
2
1,y
< r
max
. (61)
Using the Singular Value Decomposition (SVD) of the non-translation components of A
T
:
SVD
a
x,x
a
x,y
a
y,x
a
y,y
= UDV
T
(62)
where U, V
T
∈ SO(2, R) (i.e. 2x2 dimension rotation matrices with angles θ
α
and θ
β
,
respectively) and D is a 2x2 diagonal matrix representing scaling along the rotated coordinate
45
Fingerprint Matching using A Hybrid Shape and Orientation Descriptor
22 Will-be-set-by-IN-TECH
Algorithm 3 Proposed registration algorithm (Non-affine component)
Require: minutiae set P and Q
T
(for fingerprints A and transform B), anchor set Φ
ψ
, nearest
neighbourhood sets Φ
α
and Φ
β
.
P
←
{
p
i
| i ∈ Φ
α
}
, Q
T
←
q
j
| j ∈ Φ
β
, ω
affine
← 0, D
be
← 0
for all minutiae q
j
∈ Q
T
do
for k
= 1toK do
h
q
j
(k) ← #
q
j
= q
i
: (q
j
−q
i
) ∈ bin(k)
end for
end for
for iter
= 1ton do
for all minutiae p
i
∈ P do
for k
= 1toK do
h
p
i
(k) ← #
p
j
= p
i
: (p
j
− p
i
) ∈ bin(k)
end for
end for
for all minutiae p
i
∈ Φ
α
and q
j
∈ Φ
β
do
C
ty pe
ij
←
−1iftype(p
i
)=type(q
j
),
0ifty pe
(p
i
) = ty pe(q
j
)
C
angl e
ij
←−
1
2
1
+ cos((∠
initial−w arped
))
C
∗∗
(p
i
, q
j
) ←
1
−γC
ty pe
ij
C
angl e
ij
.
1
2
∑
K
k
=1
h
p
i
(k)−h
q
j
(k)
2
h
p
i
(k)+h
q
j
(k)
×exp
−
(r
k
−r
min
)
2
2σ
2
!
C
γ
(p
i
, q
j
) ← γ
d
γ
θ
C
∗∗
(p
i
, q
j
)
end for
{calculate and add minutiae pairs additional to the anchor set pairs.}
Φ
π
← Hungarian(C
γ
, Φ
α
, Φ
β
, fixedMap = Φ
ψ
)
f
(x, y) ←T.P .S (P, Q
T
, Φ
π
, Regul arized = true )
D
be
← D
be
+ WKW
T
r
affine
←
a
2
1,x
+ a
2
1,y
[U, D, V
T
, θ
α
, θ
β
] ← SVD
a
x,x
a
x,y
a
y,x
a
y,y
ω
affine
← ω
affine
+ |θ
α
+ θ
β
|
τ
affine
← log
D
1,1
D
2,2
if D
be
> E
max
or r
affine
≥ δ
max
or ω
affine
≥ θ
max
or τ
affine
≥ τ
max
then
return Φ
ψ
end if
for all minutiae p
i
∈ P do
[x, y] ← [p
i
(x) , p
i
(y)]
[
p
i
(x) , p
i
(y)] ← [ f
x
(x, y), f
y
(x, y)]
end for
end for
return return Φ
π
46
State of the Art in Biometrics
Fingerprint Matching using A Hybr id Shape and Orientation Descriptor 23
axes of V
T
with nonnegative diagonal elements in decreasing order, the evaluation of rotation
ω
affine
= |θ
α
+ θ
β
|< ω
max
, (63)
and shear
τ
affine
= log
D
1,1
D
2,2
< τ
max
, (64)
is performed for empirically set values ω
max
and τ
max
. If the above affine transform criteria
of equations 61, 63, and 64 are not met, no extra minutiae pairs are produced. Unlike the
previous method, this helps uphold spatial consistency by not creating un-natural pairs (see
Figure 8 (bottom)). Essentially, the candidate affine transform is used as the ground truth
registration over the T.P.S affine component.
A final integrity check of the validity of the additional minutiae pairs produced from the
non-affine transform is the measured bending energy, previously defined in equation 45. If
the non-affine transform produces a bending energy distance D
be
> E
max
, then all additional
minutiae pairs are also rejected, in order to avoid un-natural warping to occur. The non-affine
transform component is detailed in algorithm 3.
3.2.2 Matching algorithm
Once the minutiae pairs have been established, pruning is performed to remove unnatural
pairings. However, if we closely analyse the orientation-based descriptor used for pruning,
we can see that a fundamental flaw arises with partial fingerprint coverage, specifically for
minutiae pairs near fingerprint image edges. In such a case, the typical formula for distance
calculation cannot count orientation samples that lie outside the region of interest, and
therefore, unnecessarily reduces the orientation distance measure (see Figure 11). Moreover,
regions that have high noise also cannot have their orientation reliably estimated due to
information to be missing (if regions with high noise are masked), and likewise, reduces the
orientation-based descriptor common region coverage.
A proposed modification to the orientation-based descriptor is applied so that the amount of
common region coverage that each descriptor has is reflected in the similarity score. This is
achieved by a simple Gaussian weighting of equation 22 with
S
∗
(m
A
i
, m
B
j
)=S(m
A
i
, m
B
j
) ×exp(−max(0, Δ
cuto f f
−Δ
g_count
).μ
s
) (65)
where Δ
cuto f f
is the cutoff point where all good sample totals below this value are weighed,
Δ
g_count
is the total number of good samples (i.e. where a good sample is defined to be in a
coherent fingerprint region), and μ
s
is a tunable parameter. However, for a more exhaustive
approach, one could empirically review the estimated distribution of orientation-based
similarity scores for true and false cases, with specific attention towards the effect of coverage
completeness on the accuracy of the similarity measure.
Equation 65 relies on the intersection set of valid samples for each minutiae, defined as
I
(A
i
, B
j
)=
s
| s ∈{L, K
c
} and valid(A(s
x
, s
y
))
∩
t
| t ∈{L, K
c
} and valid(B(t
x
, t
y
))
(66)
where L is the sample position set and K
c
is the concentric circle set. Thus, we can also define
a variant of the function S
∗
(m
A
i
, m
B
j
, I) where a predefined sample index set , I, is given to
indicate which samples are only to be used for the similarity calculation, ignoring i /
∈ I even
if corresponding orientation samples are legitimately defined for both fingerprints (note: this
variant is used later for similarity scoring in the matching algorithm).
47
Fingerprint Matching using A Hybrid Shape and Orientation Descriptor
24 Will-be-set-by-IN-TECH
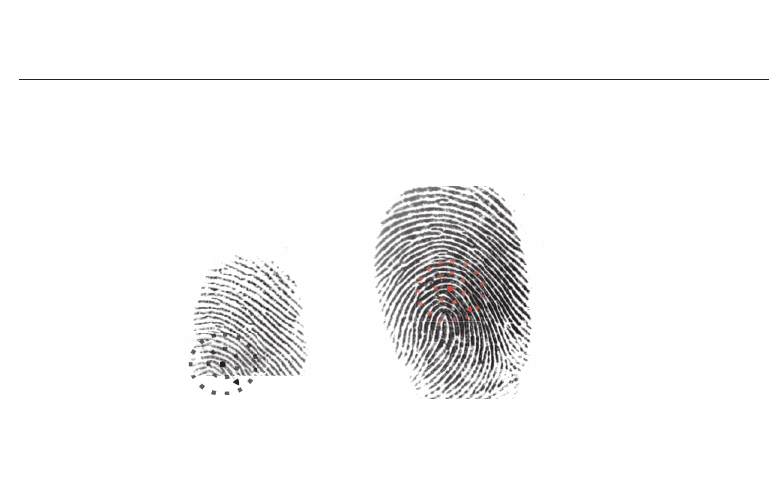
Fig. 11. An example where the orientation-based descriptor for corresponding minutiae in
two different impressions of the same fingerprint have no coverage in a substantial portion
of the orientation sample.
After the filtered minutiae pair set is produced, we can now assess the similarity of the
pairs. Minutiae δ-neighbourhood structure families, where particular spatial and minutiae
information of the δ closest minutiae to a reference minutiae are extracted as features, have
been used before in minutiae based matching algorithms (such as Chikkerur & Govindaraju
(2006) and Kwon et al. (2006)) for both alignment and similarity measure (see Figure 12). The
δ-neighbourhood structure proposed has the following fields:
• Distance d
i
: the distance a neighbourhood minutia is away from the reference minutia.
• Angle
∠
i
: the angle a neighbourhood minutia is from the reference minutia direction.
• Orientation θ
i
: the orientation difference between a neighbourhood minutia direction and
the reference minutia direction.
• Texture Γ
i
: the orientation-based descriptor sample set for a neighbourhood minutia used
to measure the region orientation similarity with the reference minutia for a given sample
index.
giving us the sorted set structure
nδ
(m
A
i
)={{d
A
i
(1)
, ∠
A
i
(1)
, θ
A
i
(1)
, {Γ
A
i
(1)
}},...,{d
A
i
(δ)
, ∠
A
i
(δ)
, θ
A
i
(δ)
, {Γ
A
i
(δ)
}}} (67)
being sorted by the distance field in ascending order. The first two fields are considered as the
polar co-ordinates of the neighbourhood minutiae with the referencing minutia as the origin,
and along with the third field, they are commonly used in local neighbourhood minutiae
based structures ( Kwon et al. (2006) and Jiang & Yau (2000)). Using the modified weighted
orientation-based descriptor, the texture field provides additional information on how each
local orientation information surrounding the δ-neighbourhood minutiae set vary from that
of the reference minutia, with the measure rated using equation 65. These structures can now
be used to further assess and score the candidate minutiae pairs.
When comparing the δ-neighbourhood elements of a candidate minutiae pair, the first three
fields are straight forward to compute the differences with
48
State of the Art in Biometrics