Воронин А.В. Исследование принципов построения регуляторов линейных систем автоматического регулирования
Подождите немного. Документ загружается.

МИНИСТЕРСТВО ОБЩЕГО И ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Томский политехнический университет
_____________________________________________________________
УТВЕРЖДАЮ
Декан АВТФ, к.т.н., доцент
___________ Мельников Ю.С.
"_____"_____________1998г.
ИССЛЕДОВАНИЕ ПРИНЦИПОВ ПОСТРОЕНИЯ
РЕГУЛЯТОРОВ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
Методические указания
к выполнению лабораторной работы №213 по курсу
"Теория автоматического управления" для студентов
специальности 21.06 - роботы и робототехнические
системы
Томск - 1998
2
УДК 62.50
Исследование принципов построения регуляторов линейных систем автомати-
ческого регулирования: Методические указания к выполнению лабораторной
работы №213 по курсу "Теория автоматического управления" для студентов
специальности 21.06. Томск: изд.ТПУ, 1998.- 7 с.
Составитель А.В.Воронин
Рецензент доц., канд. техн. наук В.Н.Шкляр
Методические указания рассмотрены и рекомендованы к
изданию
методическим семинаром кафедры интегрированных систем управления
"____"____________1998г.
Зав. кафедрой
проф., д-р техн. наук ______________________А.М.Малышенко
3
1 ЦЕЛЬ РАБОТЫ
Целью данной лабораторной работы является исследование влияния
введения управлений по интегралу и производной от ошибки регулирования на
точность и качество процесса регулирования линейными динамическими объектами.
2 ВВЕДЕНИЕ
Принцип регулирования по отклонению предполагает формирование
управляющих воздействий по информации об ошибке регулирования
)t(y)t(g)t(
−
=
ε
. В общем виде управление
)t(u
можно записать
∫
∫
∫
εεεε= )t,...,,,...,,(f)t(u
&
,
т.е. как функцию от самой ошибки, ее производных и интегралов. Однако, на
практике, наиболее употребительны законы регулирования содержащие в различных
комбинациях три составляющие - пропорциональную, дифференциальную и
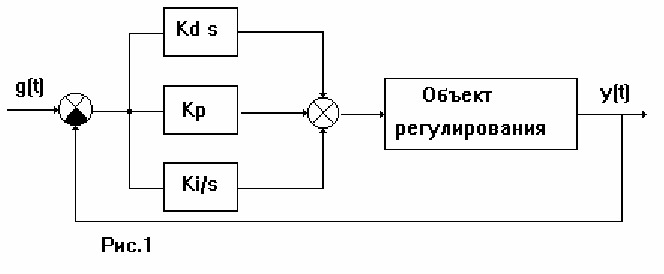
интегральную. В линейном варианте такой закон формирования
)t(u имеет вид
∫
ε+ε+ε= dt)t(k)t(k)t(k)t(u
idp
&
(1)
а звено, реализующее выражение (1), называется пропорционально-дифферен-
циально-интегральным регулятором. Или, как обычно говорят, ПИД регулятором.
Схема управления с ПИД регулятором приведена на рисунке 1.
В частном случае часть коэффициентов передачи регулятора может быть равной
нулю. В результате получаются пропорциональный (П), или пропорционально-
дифференциальный (ПД) и т.д. регуляторы.
Каждая из составляющих выражения (1) решает в процессе регулирования
свою задачу, определенным образом влияя на точность и качество регулирования.
Зная характер влияния каждого компонента на процесс в
системе, можно
синтезировать регулятор, т.е. выбрать его структуру и параметры, таким образом,
чтобы получить желаемые характеристики замкнутой САР.
3 ВЫПОЛНЕНИЕ РАБОТЫ
4
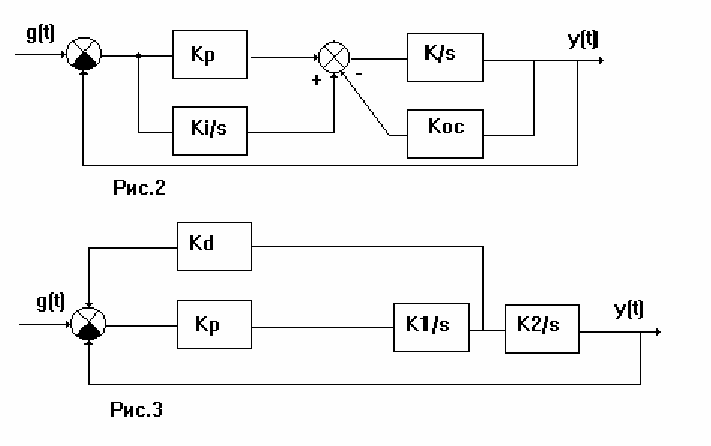
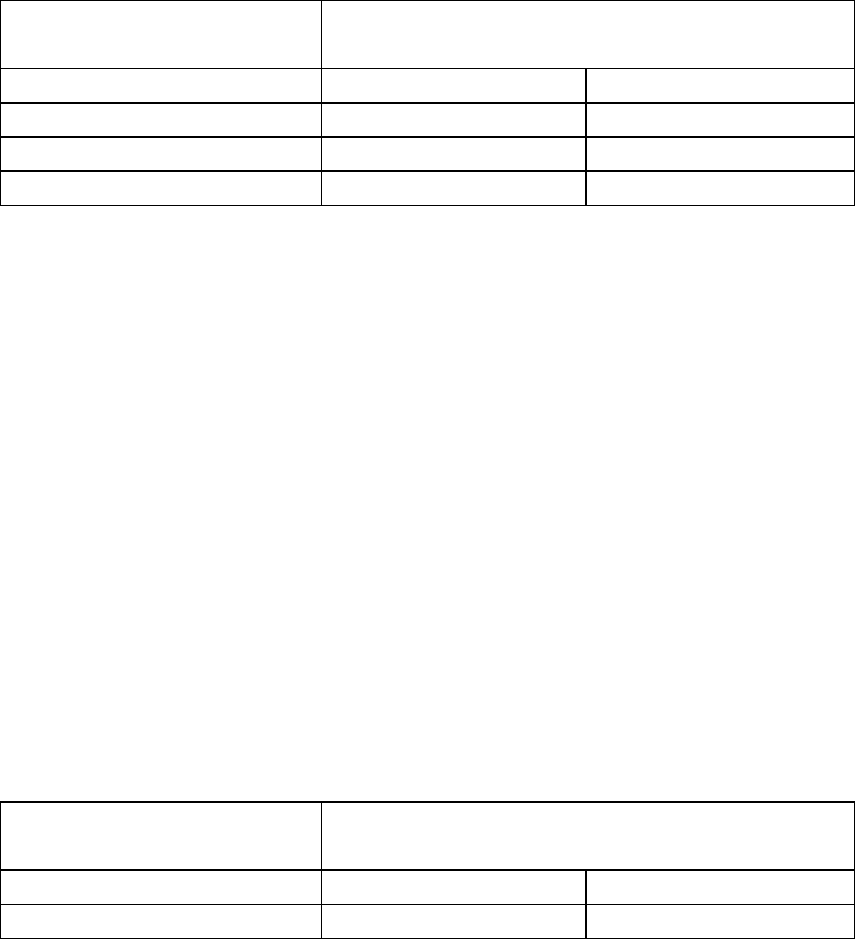
На рисунках 2,3 представлены схемы набора для исследования процессов
регулирования объектами типа апериодического звена 1-го порядка (рис.2) и
двойного интегрирующего звена (рис.3). По своей структуре обе схемы эквива-
лентны общей схеме регулирования с ПИД регулятором.
Некоторое отличие состоит в реализации управления по производной. Вместо
дифференцирования величины
)t(ε
используется обратная связь по
)t(y
&
. Легко
убедиться, что эти варианты эквивалентны.
О точности и качестве процесса регулирования будем судить по поведению
ошибки регулирования
)t(ε . Обычно под точностью регулирования понимают
статическую точность
)(∞
ε
, т.е величину ошибки , которая устанавливается в
системе после окончания переходного процесса. Диамическую же точность,
определяемую характером процесса регулирования, называют качеством
регулирования [1]. Численно ее можно охарактеризовать перерегулированием,
временем переходного процесса, числом колебаний.
Для исследования структуры и параметров регулятора на процессы в системе
необходимо поочередно рассмотреть САР с различными вариантам регуляторов -
П,ПД,ПИ,ПИД при различных значениях коэффициентов передачи. При этом можно
либо сразу набирать всю схему и отключать ненужные цепи устанавливая
0k
=
,
либо коммутировать необходимые цепи для каждого варианта в отдельности.
4. ПРОГРАММА РАБОТЫ
1. Собрать модель замкнутой САР для апериодического звена 1-го порядка с
параметрами заданными в таблице 1. На вход системы подать сигнал
)t(1g)t(g
0
= ;
5
2. Исследовать влияние коэффициентов
ip
k,k
на характер функции )t(
ε
. Для
этого провести следующие эксперименты:
2.1. Установить
0k
i
= . Меняя
p
k определить качественно зависимость
статической точности, быстродействия и перерегулирования от величины
p
k .
Зарисовать
)t(ε .
2.2. Установить
constk
p
=
. Меняя
i
k оценить эффект введения
интегральной составляющей в закон управления.
2.3. По экспериментальным данным сделать выводы о влиянии пропор-
циональной и интегральной составляющих на процессы регулирования звена 1-го
порядка. Подтвердить сделанные выводы теоретическими расчетами.
Таблица 1
Вариант Значение параметра
K
K
oc
1 1000 1.0
2 1000 0.9
3 1000 0.8
4 1000 0.7
3. Собрать модель замкнутой САР для двойного интегрирующего звена с
параметрами заданными в таблице 2. Исследовать влияние коэффициентов
p
k и
d
k
на процессы в системе.
Для этого провести следующие эксперименты:
3.1. Установить
0k
d
=
. Меняя
p
k определить его влияние на )t(y .
Зарисовать
)t(y .
3.2. Установить
constk
p
= . Меняя
d
k оценить эффект введения дифферен-
циальной составляющей в закон управления.
3.3. По экспериментальным данным сделать выводы о влиянии пропор-
циональной и интегральной составляющих на процессы регулирования звена 1-го
порядка. Подтвердить сделанные выводы теоретическими расчетами.
Таблица 2
Вариант Значение параметра
K
1
K
2
1 100 1000
2 200 500

6
3 200 1000
4 500 200
5. СОДЕРЖАНИЕ ОТЧЕТА
В отчете по лабораторной работе должны быть приведены:
- схемы моделирования САР,
- графики переходных функций по
)t(ε для каждого пункта программы,
- выводы о влиянии варьируемой составляющей закона регулирования на точность и
качество процессов по результатам эксперимента,
- теоретическое обоснование каждого вывода.
6. ЛИТЕРАТУРА
1. Бесекерский В.А.,Попов Е.П. Теория систем автоматического
регулирования.- M.: Наука,1975,767с.
ИССЛЕДОВАНИЕ ПРИНЦИПОВ ПОСТРОЕНИЯ
РЕГУЛЯТОРОВ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
Методические указания
по выполнению лабораторной работы
Составитель Воронин Александр Васильевич,
Подписано к печати
Формат 60х84.16, Бумага писчая №2.
Плоская печать. Усл. печ. л. Уч.- изд.л.
Тираж 50 экз. Заказ Бесплатно.
ИПФ ТПУ, Лицензия Л.Т №1 от 18.077.94.
Ротапринт ТПУ. 634034, Томск, пр.Ленина,30