Власов К.П. Теория автоматического управления
Подождите немного. Документ загружается.

3
К.П.ВЛАСОВ
ТЕОРИЯ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Учебное пособие
Рекомендовано к изданию Ученым советом Санкт-
Петербургского горного института
(технического университета)
ИЗДАТЕЛЬСТВО ГУМАНИТАРНЫЙ ЦЕНТР
ХАРЬКОВ 2006
2
УДК 62-50 (075.80)
ББК 32-065
Власов К.П. Теория автоматического управления. Учебное пособие. – Х.: Издательство «Гуманитарный центр»,
2006.- с.
Изложены основы современной теории автоматического управления. Дана классификация АСУ по раз-
личным признакам. Рассмотрены методы составления и решения дифференциальных уравнений движения от-
дельных звеньев АСУ, приведены статические и динамические характеристики типовых звеньев, а
также прин-
ципы построения структурных схем систем управления. Рассмотрены методы расчета автоматических систем,
позволяющие анализировать их устойчивость и качество переходных процессов в системах. Излагаются основ-
ные методы синтеза систем управления различного класса Приведенный материал охватывает широкий круг
вопросов и методик расчета для линейных и нелинейных, непрерывных и дискретных, оптимальных и адаптив
-
ных, нечетких и других автоматических систем управления.
Учебное пособие предназначено для студентов технических вузов, изучающих автоматические системы
управления
Рецензенты: кафедра робототехники и автоматизации производственных систем Санкт-Петербургского
государственного электротехнического университета (ЛЭТИ);
Л.В. Акимов (Национальный технический университет “Харьковский политехнический институт”
215
СОДЕРЖАНИЕ
ПРЕДИСЛОВИЕ………………………………………………………… 7
ВВЕДЕНИЕ……………………………………………………………….
8
Р А З Д Е Л I
ЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ….
14
1.СОСТАВЛЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ ЭЛЕМЕНТОВ АСУ И
МЕТОДЫ ИХ РЕШЕНИЯ…………………………………………………………...…. 14
1.1. Математическое описание элементов системы с помощью
дифференциальных уравнений……………………………………………………… 14
1.1.1. Линеаризация дифференциальных уравнений……………………………... 16
1.2 Математическое описание системы в переменных состояния……………… 19
1.3. Методы решения линейных дифференциальных уравнений………………. 22
1.3.1. Классический метод………………………………………………………….. 22
1.3.2. Применение преобразования Лапласа. Передаточная функция…………... 25
1.4. Частотные характеристики линейных систем………………………………... 29
1.4.1. Условия однозначной связи между частотными характеристиками……… 31
1.5. Связь между операторами преобразования сигналов линейной системой.. 32
2. ТИПОВЫЕ ЗВЕНЬЯ И СТРУКТУРНЫЕ СХЕМЫ АСУ……………….……….. 34
2.1. Типовые динамические звенья………………………………………….………. 34
2.1.1. Усилительное звено……………………………………………………….….. 35
2.1.2. Апериодическое звено первого порядка……………………………………. 35
2.1.3. Апериодическое звено второго порядка……………………………………. 37
2.1.4. Колебательное звено………………………………………………….……… 38
2.1.5. Интегрирующее звено…………………………………………………….….. 41
2.1.6. Дифференцирующее звено…………………………………………….…….. 42
2.2. Структурные схемы АСУ
………………………………………………………… 43
2.2.1.Основные виды соединения звеньев…………………………………………. 43
2.2.2. Правила структурных преобразований………………………………………... 45
2.2.3. Использование графов для преобразования структурных схем…………… 47
2.3. Многомерные системы управления…………………………………………….. 52
2.3.1. Управляемость и наблюдаемость……………………………………………. 55
3. УСТОЙЧИВОСТЬ И КАЧЕСТВО ФУНКЦИОНИРОВАНИЯ АСУ…………... 58
3.1. Устойчивость АСУ………………………………………………………………... 58
3.1.1. Переходные процессы в АСУ…………………………....………………….. 58
3.1.2. Алгебраический критерий устойчивости Гурвица…………………………. 61
3.1.3. Частотные критерии устойчивости………………………………………….. 63
3.2. Качество
процесса управления………………………………………………….. 69
3.2.1. Прямые методы оценки качества……………………………………………. 69
3.2.2. Косвенные методы оценки качества………………………………………… 72
4. МЕТОДЫ СИНТЕЗА АСУ…………………………………………………………… 77
4.1. Законы регулирования в линейных АСУ……………………………………… 77
4.2. Коррекция линейных АСУ………………………………………………………. 81
216
4.3. Параметрический синтез устройств управления……………………...……… 87
4.3. Инвариантные системы…………………………………………………..……... 90
4.5. Синтез модальных регуляторов……………………………….……………….. 95
4.5.1. Синтез регуляторов состояния……………………………….……………... 95
4.5.2. Принципы построения наблюдателей состояния………..………….……….102
4.5.3. Модальный регулятор…………………………………………….…………. 105
4.6. Частотные методы АСУ…..……………………………………….…………….
107
4.6.1. Логарифмические частотные характеристики…..............……….………… 107
4.6.2. Синтез АСУ с помощью логарифмических амплитудно-частотных
характерстик….....................…………………………….…….…………….
112
РАЗДЕЛ II
ОСОБЫЕ ЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ
УПРАВЛЕНИЯ
…………………………………………………………………….………
119
5. СИСТЕМЫ С ЗАПАЗДЫВАНИЕМ И РАСПРЕДЕЛЕННЫМИ
ПАРАМЕТРАМИ………………………………………………………………….…………..
120
5.1. Системы с запаздыванием…………………………………………….……….…. 120
5.2. Системы с распределенными параметрами……………………….…………… 123
5.3. Устойчивость систем с запаздыванием……………………………….………… 126
5.4. Коррекция АСУ объектами с большим запаздыванием……………….…….. 130
6. ИМПУЛЬСНЫЕ СИСТЕМЫ……………………………………………….……….. 135
6.1. Математические методы анализа функционирования импульсных систем. 136
6.1.1. Разностные уравнения………………………………………………………… 136
6.1.2. Прямое z-преобразование…………………………………………………….. 143
6.1.3. Обратное z-преобразование…………………………………………………... 147
6.1.4. Модифицированное z-преобразование………………………………………. 150
6.2. Импульсные фильтры…………………………………………………………….. 151
6.3. Устойчивость импульсных систем………………………………………………. 154
6.3.1. w-преобразование……………………………………………………………... 156
6.3.2. Частотные критерии устойчивости…………………………………………... 158
6.4. Качество функционирования импульсных систем…………………………… 162
РАЗДЕЛ III
НЕЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ
УПРАВЛЕНИЯ
……………………………………………………………………………..
165
7. СТАТИКА НЕЛИНЕЙНЫХ СИСТЕМ………………….…………………………..
165
7.1. Основные типы нелинейных звеньев…………………………………………... 165
217
7.2. Соединение нелинейных звеньев………………………………………………... 170
7.3. Структурные преобразования нелинейных систем………………...………… 175
8. ТОЧНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ ДИНАМИЧЕСКИХ
СВОЙСТВ НЕЛИНЕЙНЫХ СИСТЕМ ………………………………………………. 178
8.1. Метод припасовывания…………………………………………………………... 178
8.2. Метод фазовых траекторий…………………….………………………………… 180
8.2.1. Анализ линейных систем с помощью метода фазовой плоскости…………. 181
8.2.2. Анализ нелинейных систем с помощью метода фазовой плоскости………. 185
8.2.3. Исследование релейных АСУ………………………………………………… 188
8.2.4. Колебательные процессы в релейных системах…………………………….. 190
8.2.5. Метод точечных преобразований……………………………………………. 193
8.2.6. Скользящий режим…………………………………………………………… 195
9. ПРИБЛИЖЕННЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
ДИНАМИЧЕСКИХ СВОЙСТВ НЕЛИНЕЙНЫХ СИСТЕМ……………………………
198
9.1. Метод гармонической линеаризации…………………………………………… 198
9.1.1. Сущность метода……………………………………………………………… 198
9.1.2. Критерии устойчивости……………………………………………………… 200
9.1.3. Определение коэффициентов гармонической линеаризации……………... 204
9.1.4. Определение параметров автоколебаний………………………………….... 205
9.2. Вибрационная линеаризация нелинейностей…………………………………. 209
9.3. Статистическая линеаризация нелинейностей……………………………….. 212
РАЗДЕЛ IV
СПЕЦИАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
……………........................ 215
10. ОПТИМАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ………………………………... 215
10.1. Цель управления и критерий оптимальности…………………………….. 215
10.2. Энергетические соотношения при управлении, оптимальном по
Быстродействию……………………………………………………………………… 218
10.3. Основные методы синтеза оптимальных систем управления………….. 220
10.3.1. Синтез оптимальных систем с помощью вариационного исчисления 221
10.3.2. Динамическое программирование…………………………………….. 233
10.3.3. Принцип максимума……………………………………………………. 240
10.3.4. Синтез систем, оптимальных по быстродействию…………………… 242
10.4. Статистическая динамика и оптимальные фильтры……………………. 249
10.4.1. Основные характеристики случайных функций……………………… 249
10.4.2. Прохождение случайного сигнала через линейную систему
254
10.4.3. Расчет установившихся ошибок в системах управления…………….. 257
10.4.4. Синтез системы управления по минимуму средней квадратической
ошибки…………………………………………………………………………. 258
11. АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ…………………………………… 269
11.1. Экстремальные системы управления………………………………………. 270
218
11.1.1. Непрерывные экстремальные системы………………………………… 272
11.1.2. Дискретные экстремальные системы…………………………………... 276
11.1.3. Методы поиска экстремума в многоканальных экстремальных
системах……………...…………………………………………………………... 281
11.2. Самонастраивающиеся системы управления……………………………... 284
11.2.1. Аналитические самонастраивающиеся системы……………………… 285
11.2.2. Идентификация динамических звеньев системы……………………… 292
11.3. Интеллектуальные системы управления……………………………………. 299
11.3.1. Самоорганизующиеся системы………………………………………….. 299
11.3.2. Обучающиеся системы……………………………………………………. 302
11.3.3 Искусственные нейронные сети………………………………………… 307
12. НЕЧЕТКИЕ СИСТЕМЫ УПРАВЛЕНИЯ………………………………………... 314
12.1. Формальная (четкая) логика…………………………………………… 315
12.2. Нечеткая логика (фази-логика)………………………………………… 316
12.2.1.Основные понятия нечеткой логики………………………………. 316
12.2.2. Основные операции с нечеткими лингвистическими
переменными………………………………………...………………………318
12.3. Основные принципы построения нечетких систем управления…. 329
12.3.1. Передаточные характеристики управляющего устройства……. 331
12.3.2. Синтез нечетких систем управления…………………………….. 332
12.3.3. Нечеткие нейронные сети в системах управления……………… 339
Рекомендательный библиографический список…………........................... 342
219
ПРЕДИСЛОВИЕ
На современном этапе развития человеческого общества дальнейшее его
совершенствование невозможно представить без знания законов управления во всех
сферах человеческой деятельности. В этой связи изучение основ кибернетики, как науки
об управлении, становиться одним из необходимых условий подготовки специалистов
практически во всех областях знаний. Раздел кибернетики, изучающий способы
управления разнообразными техническими устройствами, технологическими процессами
и производствами, обычно называется теорией автоматического управления или
технической кибернетикой. Эта дисциплина включена практически во все учебные планы
технических вузов. И фактически стала общеобразовательной, так как, например физика.
Поэтому издание учебной литературы, компактно и доступно излагающей широкий круг
вопросов, связанных с анализом и синтезом разнообразных автоматических систем
управления, является, безусловно полезным.
Книга состоит из четырех разделов. В первом разделе достаточно полно изложены
основы линейной теории автоматического управления. Особое внимание уделено
различным методам синтеза линейных систем. Материал раздела может быть
использован студентами различных технических специальностей. В этой связи в разделе
приведены необходимые пояснения математических методов, применяемых для
исследования динамических процессов в линейных системах. Второй раздел посвящен
изучению особых линейных систем содержащих звенья с запаздыванием,
распределенными параметрами, а также импульсные звенья. В третьем разделе приведены
основные сведения по расчету статических и динамических режимов нелинейных систем.
Последний, четвертый раздел посвящен созданию специальных (оптимальных,
адаптивных, нечетких и других) систем управления.
Для лучшего усвоения достаточно сложного материала его изложение не
загромождено излишними подробностями. В целом, книга дает общее представление об
основных проблемах, рассматриваемых в теории автоматического управления и
способствует получению базовых знаний в этой области, что существенно расширяет
кругозор специалистов.
Автор выражает признательность канд. техн. наук А.С. Анашкину и М.К. Анихину
за помощь, оказанную при подготовке рукописи к печати.
220
ВВЕДЕНИЕ
Родственные науки объединяются фундаментальными науками высшего ранга. На-
пример, физика охватывает наши знания о вещах очень разных, но подчиняющихся об-
щим законам (в частности, законам сохранения вещества и энергии). В процессе станов-
ления физики как науки были выработаны два могучих средства установления истины:
математический аппарат и опыт. В качестве критерия истины здесь, как и в любых других
науках, используется практика – реализация научных идей.
В 1948 г. Н.Винер опубликовал книгу «Кибернетика, или управление и связь в жи-
вотном и машинах», в которой показал, что можно создать еще одну науку высшего ранга.
Кибернетика – древнегреческое слово, означающее искусство управления кораблем, руле-
вой. Платон упоминает кибернетику как науку об административном управлении провин-
циями. В 1840 г. Ампер, классифицируя науки, отнес ее к общественным наукам. Совре-
менная кибернетика относится к области точных наук, широко использующих математи-
ческий аппарат и опыт. Как и физика, кибернетика не является наукой всех наук. Есть яв-
ления, где нет управления, и кибернетика к ним не применима.
Чтобы отличить управляемое от неуправляемого, обычно прибегают к понятию це-
лесообразности, под которым понимают соответствие объекта определенному состоянию.
Достижение этого состояния связано с воздействием процесса управления на объект.
Управление может быть привнесено извне, а может быть присуще самому объекту.
В последнем случае мы говорим о самоуправлении или автоматизме (от греч. самодейст-
вующий). Кибернетика, как правило, изучает самоуправляющиеся системы, т.е. такие, где
хотя бы один элемент является самоуправляющимся, определяющим целесообразность
управления объектом.
Рассматривая кибернетику как науку о целесообразности выделяют ту ее сторону,
которая примыкает к философии. Здесь у кибернетики есть предшественник – телеология
(учение о цели). Эта наука утверждает, что все в природе устроено целесообразно и всякое
развитие является осуществлением заранее предписанных целей. Однако кибернетическая

221
система может ставить себе и такие цели, которые противоречат целям системы более вы-
сокого уровня, и поэтому фатализм следует признать несостоятельным.
Говоря о кибернетике, как о теории автоматизма, мы выделяем другую ее сторону,
примыкающую к практике, – проблему реализации поставленной цели методами управле-
ния объектами. Нужно иметь в виду, что объекты управления можно классифицировать по
самому существенному признаку на живые и неживые. По одну сторону грани стоит че-
ловек вместе с животными и растениями, а по другую автомат – создание рук человече-
ских. Можно долго перечислять, чем отличается человек от автомата, но не к отрицанию
этих различий сводятся идеи кибернетики, а к поиску, исследованию аналогий между жи-
вым организмом и техническим устройством. Заметим, что все попытки человека в точно-
сти скопировать и воспроизвести с помощью технического устройства технологический
процесс, выполняемый живым организмом, были безуспешными: самолет летает не так,
как птица, подводная лодка плавает не так, как рыбы, и т.д. Отсюда следует, что если
под
разумом понимать способность учиться и извлекать уроки из опыта, адекватно реагиро-
вать на новые ситуации, то можно утверждать, что разумные управляющие машины могут
быть созданы, но они будут выполнять свои функции не так, как человек. Уже сейчас ав-
томаты во много раз увеличивают интеллектуальные возможности человека, во многом
избавляя
его от рутинной работы. Поэтому будущий мир рисуется как содружество авто-
мата и человека. Но надо всегда помнить, что как ни велика разница между обломком
камня и автоматом, она все же меньше, чем между человеком, создавшим этот автомат, и
его предком, впервые взявшим в руки этот камень, так как человек развивается гораздо
быстрее, чем неживая природа.
Учитывая изложенное, уместно напомнить, что, по А.И.Бергу, кибернетика – это
наука об управлении в сложных динамических системах различной природы, где слож-
ность понимается как наличие в системе разнородных элементов (человек, природа, тех-
ника) и разнообразных связей между ними (положительных, отрицательных, прямых, об-
ратных и др.).
В зависимости от класса объекта управления кибернетика подразделяется на тех-
ническую, организационную, экономическую, медицинскую и др.
Техническая кибернетика (или теория автоматического управления) – отрасль
науки, изучающая технические системы с помощью идей и методов кибернетики. Основ-
ная задача управления техническим объектом – найти и реализовать в данных условиях
алгоритм
*)
управления, при котором выполняются требования, предъявляемые к процессу.
*)
Алгоритм – предписание, определяющее содержание и последовательность операций, переводящих исход-
ные данные в искомый результат. При этом алгоритм должен обладать свойствами определенности, массовости и ре-
зультативности.
222
Выбор наиболее рационального алгоритма управления на основании имеющейся инфор-
мации – ярко выраженная экстремальная задача. Таким образом, анализ информационных
процессов в системе с целью их алгоритмизации и синтез систем управления, реализую-
щих этот алгоритм, и являются задачей теории автоматического управления.
Требованиями, предъявляемыми к управляемому процессу, могут являться: огра-
ничения на входные координаты (например, различного рода допуски, ошибки, погреш-
ности и т.д.); экстремальные условия (например, получение максимальной мощности,
КПД, минимальной себестоимости и т.д.); некоторые показатели качества.
Техническими средствами для реализации систем управления являются средства
получения информации (датчики), ее передачи и обработки и средства регулирования (ре-
гуляторы, исполнительные механизмы, регулирующие органы).
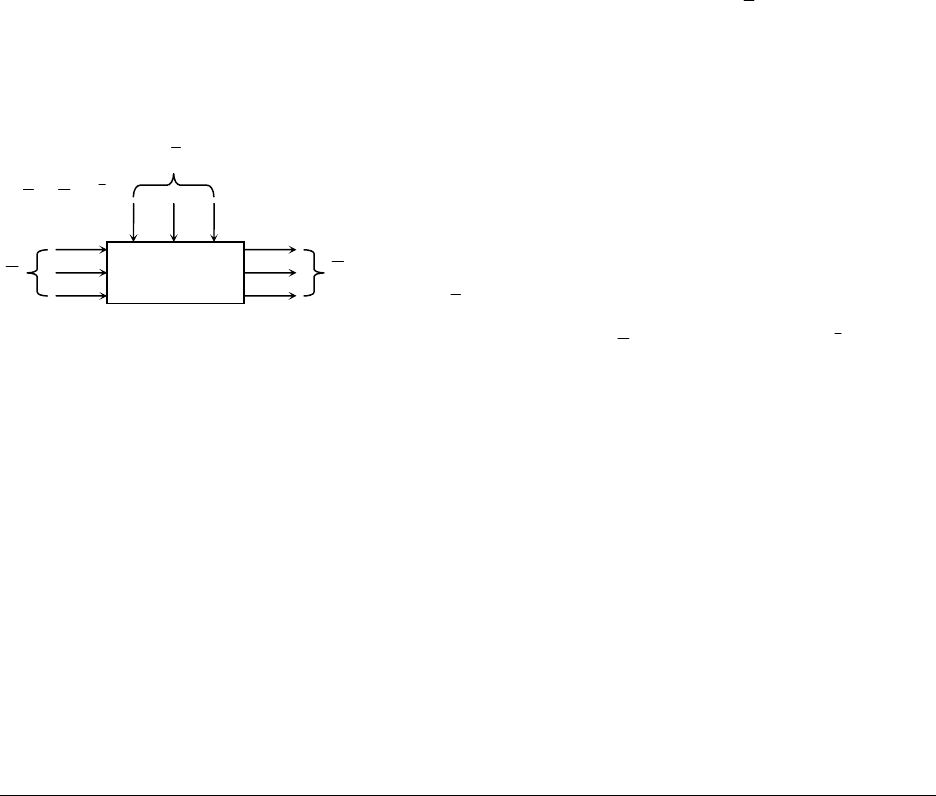
Протекание технологического процесса или поведение технического устройства
характеризуются некоторыми переменными величинами. Если речь идет об управлении,
то процессы и устройства рассматриваются как объект управления (ОУ), желаемое пове-
дение которого должно быть обеспечено. Переменные, которые характеризуют функ-
ционирование объекта управления, называют выходными величинами y (чаще всего, это
физическая величина). Иногда их называют выходными координатами системы (рис.1).
В реальных условиях на объект управления оказывает воздействие внешняя среда.
Все многообразие этого воздействия учесть невоз-
можно. Поэтому в поле зрения оставляют лишь вели-
чины, которые оказывают заметное влияние на вы-
ходные координаты, их называют входными воздейст-
виями
x
. Эти воздействия подразделяются на две
группы: управляющие u и возмущающие f . Управ-
ляющие воздействия обеспечивают желаемое функционирование объекта, и должны быть
прежде всего изменяемыми. Если таких воздействий нет, то задача управления не имеет
решения. Возмущающие воздействия препятствуют нормальному функционированию
объекта управления, и изменить их, как правило, невозможно. Задача управления заклю-
чается в формировании такого алгоритма (закона) управления, при котором достигается
желаемое состояние объекта независимо от наличия возмущений.
При создании автоматических систем управления используют два основных прин-
ципа управления: по возмущению и по отклонению.
ОУ
fux +=
f
y
u
Рис.1