Van Kreveld M., Nievergelt J., Roos T., Widmayer P. (eds.) Algorithmic Foundations of Geographic Information Systems
Подождите немного. Документ загружается.

x-queue t
y-table
y 6
1 t
t,i !1
"I I I
-I
t ltl '
III '_
discarded active
tail current
Q
!
I
i
O
t I
! I
t 1
future
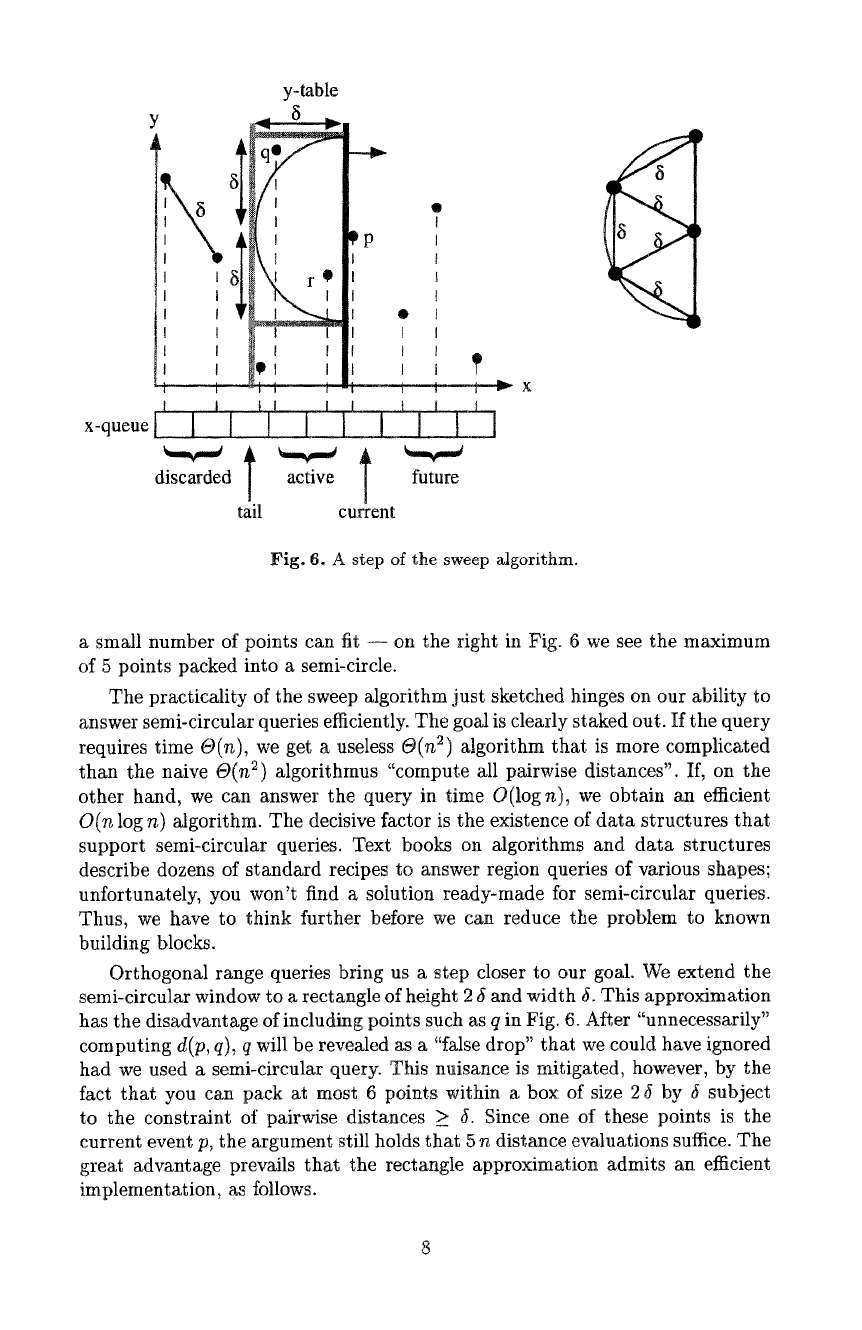
Fig. 6. A step of the sweep algorithm.
a small number of points can fit -- on the right in Fig. 6 we see the maximum
of 5 points packed into a semi-circle.
The practicality of the sweep algorithm just sketched hinges on our ability to
answer semi-circular queries efficiently. The goal is clearly staked out. If the query
requires time O(n), we get a useless O(n 2) algorithm that is more complicated
than the naive O(n 2) algorithmus "compute all pairwise distances". If, on the
other hand, we can answer the query in time O(logn), we obtain an efficient
O(n
log n) algorithm. The decisive factor is the existence of data structures that
support semi-circular queries. Text books on algorithms and data structures
describe dozens of standard recipes to answer region queries of various shapes;
unfortunately, you won't find a solution ready-made for semi-circular queries.
Thus, we have to ~hink further before we can reduce the problem to known
building blocks.
Orthogonal range queries bring us a step closer to our goal. We extend the
semi-circular window to a rectangle of height 2 5 and width 5. This approximation
has the disadvantage of including points such as q in Fig. 6. After "unnecessarily"
computing
d(p, q), q
will be revealed as a "false drop" that we could have ignored
had we used a semi-circular query. This nuisance is mitigated, however, by the
fact that you can pack at most 6 points within a box of size 2 5 by 5 subject
to the constraint of pairwise distances > 5. Since one of these points is the
current event p, the argument still holds that 5 n distance evaluations suffice. The
great advantage prevails that the rectangle approximation admits an efficient
implementation, as follows.
A sweep algorithm maintains a queue of events, in this case the given points,
sorted by x-coordinate. Thus, it is easy to continually discard points that trail
the front by a distance > 5. When answering a query, we consider only the
"active" points, i.e. those that lie in a narrow strip of width ~ to the left of the
front. Depending on where the current event p lies on the front, any of the active
points can form a new closest pair with p. We maintain the active points, sorted
by y-coordinate, in a table that permits fast "dictionary operations": find, insert,
delete, predecessor and successor.
This standard data type "dictionary" can be implemented using a dozen
different data structures, resulting in different performance characteristics. We
aim at an algorithm that runs in time
O(ntogn)
in the worst case. Balanced
trees implement dictionary operations with a worst case time bound of O(log k),
where k is the number of entries in the dictionary -- for our sweep algorithm,
k < n. Predecessor and successor require only time O(1). The asymptotic run-
time analysis that follows does not depend on the specific choice of data structure
but only on the existence of data structures that guarantee a time bound of
O(log n) for each dictionary operation.
The current event p is inserted into the table according to its y-coordinate
p.y.
Vertically, p lies in the middle of the 2 ~-range of the rectangular query.
Starting at p, we scan the active points in the table both upwards, applying the
operation "successor" until we exit from the rectangle at coordinate
p.y
+ 5 ; as
well as downwards, applying "predecessor" until we exit from the rectangle at
p.y - 5.
Thus, we have visited each point q in the rectangle and submitted it to
a distance computation
d(p, q).
The total time required for processing an event
p thus adds up to:
(insert
p) +
(~ of points q in the rectangle) × (predecessor or successor + evaluate
d(p, q)).
Insert requires time O(log n); predecessor, successor and evaluate
d(p, q)
need
time O(1). The number of points in the rectangle is < 5. Thus, processing an
event is dominated by the insertion of p into the dictionary and takes time
O(Iogn). With a total of n events we have found a simple, efficient
O(nlogn)
algorithm for the problem of the closest pair. Assuming that standard operations
such as sorting and dictionary access can be obtained from a program library,
this sweep algorithm takes at most one additional page of source code.
The success of sweep algorithms is due to a clever trick. By treating the x-a~is
as a time-dimension, a 2-d problem is reduced to a sequence of 1-d problems. For
1-d data, i.e. totally ordered domains, we know various efficient data structures.
Thanks to these, sweep algorithms succeed in processing n 1-d problems, each of
which may involve n data items, in time
O(ntogn)
rather than in time O(n2).
Unfortunately, this idea does not generalize efficiently to higher dimensions, tf
we sweep 3-d space with a plane, we transform a 3-d problem into a sequence of
2-d problems. The latter generates queries in a 2-d data space, and for these we
rarely have data structures that answer queries in logarithmic time. We leave
the discussion of spatial data structures to the survey in Chapter
7.
4 Degeneracy, Robustness, and the Quest for Perfection
The above description of the closest-pair sweep ignores a few details. Although
these may appear trivial, a programmer cannot ignore them when aiming at
a robust program, i.e. one that will work correctly for
all
data configurations,
rather then merely for most of them. For example, plane sweep relies strongly
on correctly sorted events. What happens if two or more events have exactly
the same x-cx)ordinate? What ff two points in the input data turn out to have
exactly the same x and y coordinates? Are they one point or two? If we treat
them as two distinct points that happen to coincide, in what order do we process
them? Will the algorithm correctly process a distance 5 -- 0? What happens to
the complexity analysis that relied heavily on the fact that at most 5 points can
be located in a query rectangle of size 2 5 by 5?
The closest pair sweep is such an exceptionally simple algorithm that it can
easily be made immune against such nitpicking questions: events of equal x-
coordinate can be processed in any order, and the algorithm terminates when a
distance (~ = 0 has been computed or all events have been processed.
It came as a surprise, however, that "nitpicking questions" of the type above
pose serious and technically very difficult problems for other geometric algo-
rithms that also appear rather simple. Chapter I0, "Precision and robustness",
treats this topic in depth. Here we merely aim to explain why the full extent of
these difficulties was not recognized at first, and what the core cause of these
difficulties is.
The concept of (small) numerical errors, unavoidable in numerical compu-
tation, has been extensively studied. The overriding concern of traditional nu-
merical analysis is to minimize such errors, to study how they propagate, and to
prove rigorous error bounds. An arsenal of techniques has been developed for this
purpose, such as: using double or variable precision at critical steps; algorithms
that adapt their discretization to the data; forward and backward error analy-
sis; the concept of numerical stability; the distinction between well-conditioned
and ill-conditioned problems, and many more. Thus, one might have expected
that the techniques of error control developed by numerical analysts would ap-
ply to geometric computation as well. But those techniques were developed in
the context of linear algebra and differential equations. They apply only to a
limited extent to geometry, since they fail to address the central issue of correct
geometric computation: topological consistency.
Topological consistency is a concept not commonly encountered in traditional
applications of numerical analysis. It calls for computing certain relations among
the data
exactly,
not merely approximately, in the presence of roundoff and other
errors typical of finite number systems. Let us briefly address the issues: What is
it? Why do we care? What concepts are involved? What questions arise? What
can be achieved, and at what cost?
Everytime an algorithm executes a test, it asks a question about the data
configuration and obtains an answer. The issue arises whether the answers ob-
tained are consistent with each other, i.e. whether they correspond to a possible
data configuration of the type the algorithm is supposed to handle. To under-
10
stand the problem, think of M. Escher's famous drawings of impossible objects:
each and every local snapshot is realistic by itself; but the way the local scenes
relate to each other turns the aggregate into a picture of a physically impossible
scene. This amusing artistic phenomenon is directly analogous to the problem
of inconsistent answers in geometric computation.
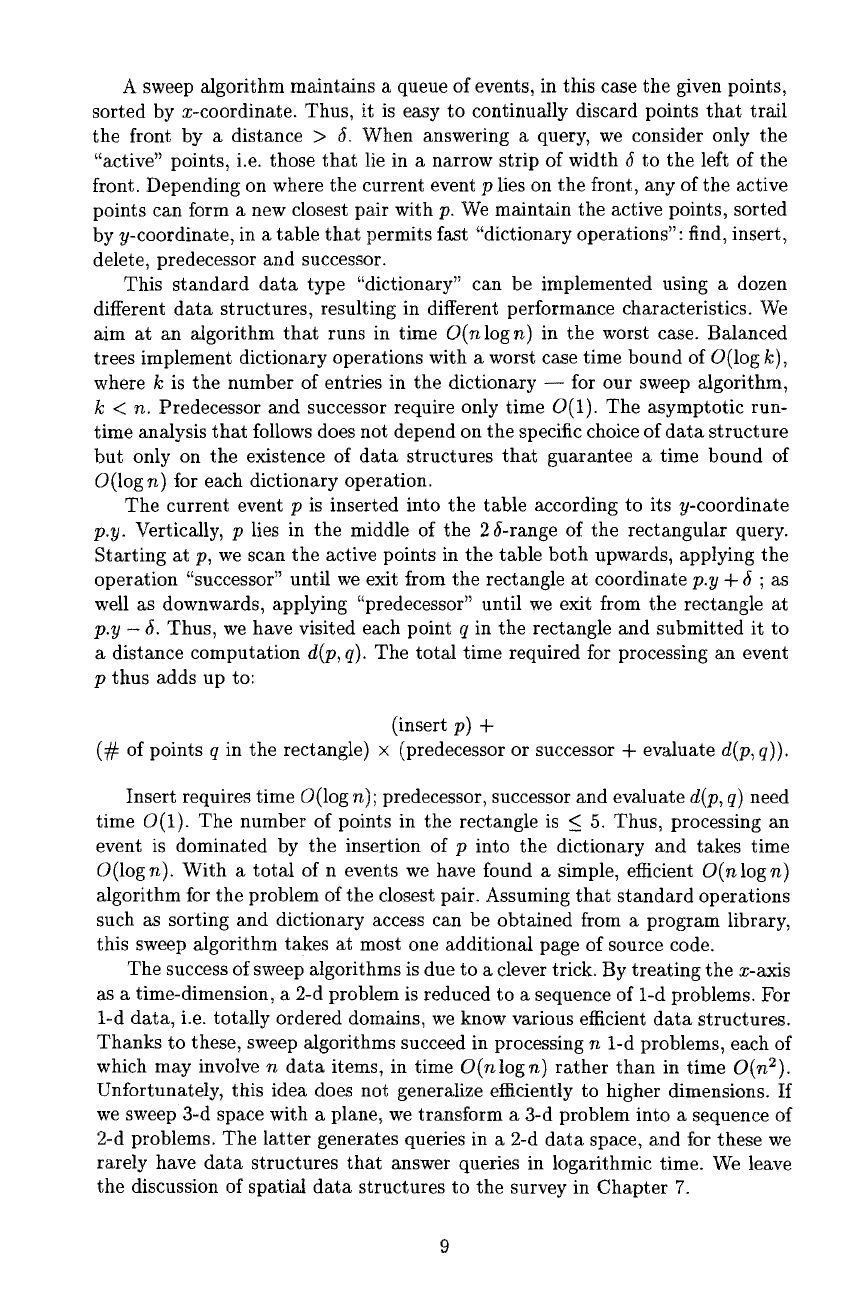
Consider the tantalizing phenomenon of "The Braiding of Floating Point
Lines" (L. Ramshaw). According to Euclid, two distinct straight lines in a plane
intersect in at most one point. In view of roundoff errors, is it not surprising
that several different points might simultaneously satisfy both equations that
define the two lines, suggesting a cluster of intersection points. It is a bit sur-
prising, though, to see that the straight lines y = 4.3
x/8.3
and y = 1.4
x/2.7,
evaluated for various values of x using two decimal digit arithmetic, cross each
other repeatedly as shown in Fig. 7, and as indicated numerically in the following
table:
x 1.78.79.85.86.92.931slope
4.3
x/8.31.39.39.43.43.46.46.5181
1.4 x/2.71.37
.40.40.44.44.48.5185
.48-
.38-
.37-
4.3 x/8.3
1.4 x/2.7
ill ill i Ill if ~ ......... .........
.73 .75 .95 x
Fig. 7. Straight lines confined to gridpoints can alternate repeatedly w.r.t, the relation
The numerical behavior observed, i.e. the repeated alternation of the relation-
ship "above-below" as x grows monotonically, is inconsistent with the geometric
properties of straight lines. Does it matter, given that the computed y-values are
so close to each other?
That depends on what conclusions we draw from a few of these observations.
Assume that, in a visibility computation of what can be seen from above, we
are only interested in the question which of the two lines is above the other
one in some interval of the x-axis. From the observed values at x -- .79 and
x = .85 we might wish to conclude that y = 4.3x/8.3 will be above y =
1.4x/2.7
11
for all x > .85, and thus save further evaluations. But in this case, the small
roundoff errors that could be ignored if we were only interested in computing an
intersection point mislead us into a global error about the vertical ordering of
the lines. To see that we have declared the wrong line as uppermost, compare
the slopes: 4.3/8.3 ~ .5181 < 1.4/2.7 ~ .5185.
The problem of the braiding lines is of course not due to our use of only 2
decimal digits in the mantissa -- for any fixed precision arithmetic examples
of the same phenomenon can be found. Perhaps the problem can be avoided by
using variable precision arithmetic, i.e. as many digits as the data requires -- but
that is costly. Can we invent a consistent geometry wherein any pair of straight
lines defines three intervals: Line L above line L', an intersection interval where
L and L ~ coincide, followed by line L r above line L?
There are other problems where inconsistencies of some kind simply cannot
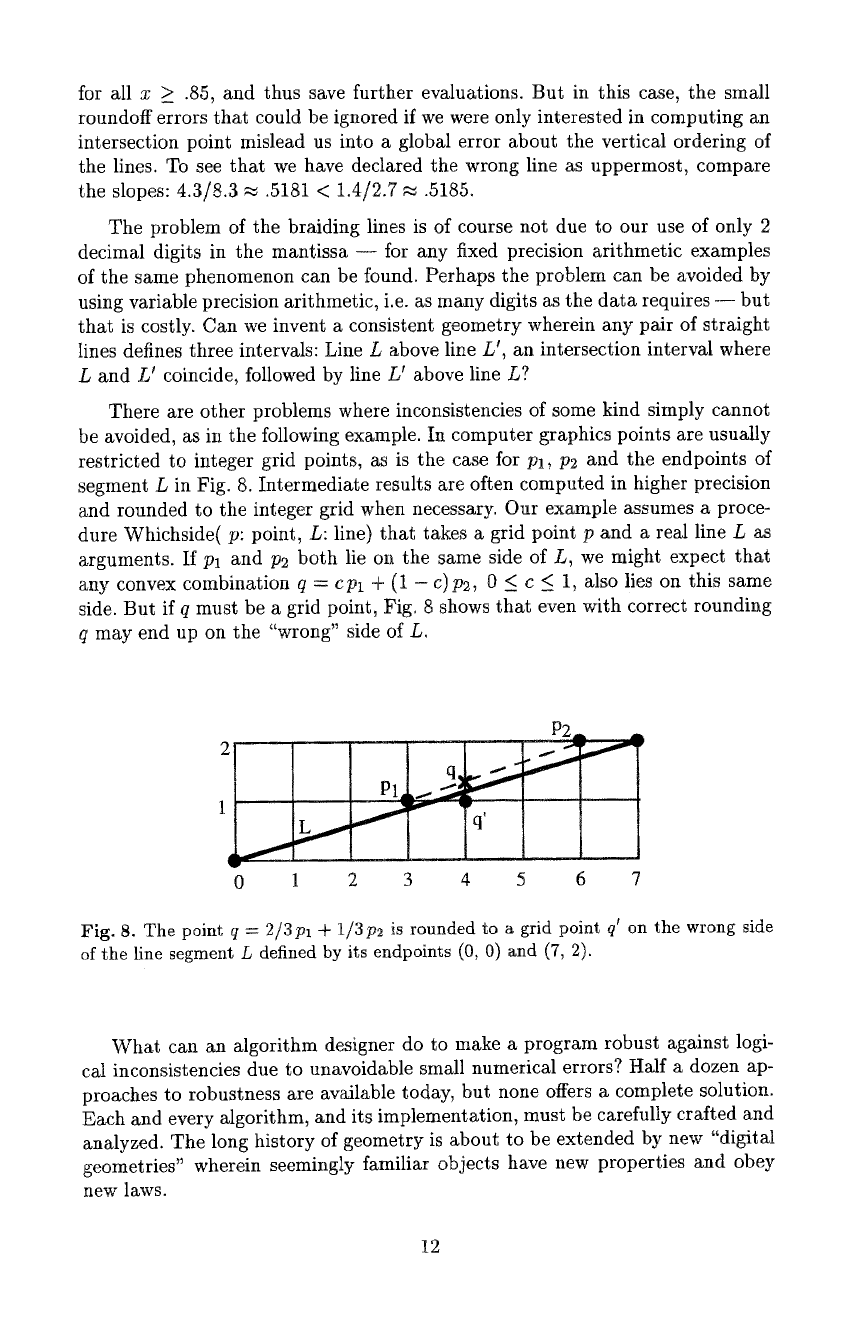
be avoided, as in the following example. In computer graphics points are usually
restricted to integer grid points, as is the case for Pl, P2 and the endpoints of
segment L in Fig. 8. Intermediate results are often computed in higher precision
and rounded to the integer grid when necessary. Our exa~tpte assumes a proce-
dure Whichside( p: point, L: line) that takes a grid point p and a real line L as
arguments. If Pl and p2 both lie on the same side of L, we might expect that
any convex combination q = cpl + (1 - c)p2, 0 < c < 1, also lies on this same
side. But if q must be a grid point, Fig. 8 shows that even with correct rounding
q may end up on the "wrong" side of L.
P2
1 Pl ,
0 1 2 3 4 5 6 7
Fig. 8. The point q = 2/3pl + 1/3p2 is rounded to a grid point q~ on the wrong side
of the line segment L defined by its endpoints (0, 0) and (7, 2).
What can an algorithm designer do to make a program robust against logi-
cal inconsistencies due to unavoidable small numerical errors? Half a dozen ap-
proaches to robustness are available today, but none offers a complete solution.
Each and every algorithm, and its implementation, must be carefully crafted and
analyzed. The long history of geometry is about to be extended by new "digital
geometries" wherein seemingly familiar objects have new properties and obey
new taws.
12
5 The XYZ GeoBench: A Program Library for Algorithm
Animation
Computational geometry has now enjoyed two decades of rapid progress. It
turned a field characterized by trial and error into a discipline where no pro-
grammer can work competently in ignorance of theory. But in order to make
the advances of computational geometry accessible to application programmers,
standard algorithms must be turned into correct, robust, efficient, well-tested,
portable programs. It has become clear that the development of professional
software for geometric computation calls for specialists with a broad range of
experience that ranges from algorithm design and analysis to numerics and pro-
gram optimization. Chapter 11, "Implementation and library design of geometric
algorithms", discusses these issues and describes the project CGAL that aims
at a library of production-quality geometric programs.
The implementation of a sophisticated geometric algorithm is an arduous
endeavor if attempted without the right tools, such as: A library of abstract
data types (e.g. dictionary, priority queue) and corresponding data structures
(e.g. balanced tree, heap), reliable geometric primitives (e.g. intersection of 2 line
segments), and visualization aids. What the applications programmer needs, but
can rarely find today, are reliable and efficient reusable software building blocks
that perform the most common geometric operations. Geometric modelers, the
core of CAD systems, do not address this problem -- they are typically monoliths
from which application programmers cannot extract any useful part to use in
their own programs.
In order to provide insight into the functions and structure of a geometry
software system, this section presents an example aimed primarily at educa-
tion. The XYZ (eXperimental geometry Zurich) GeoBench and Program Library
[NSdL+91]is used as a programming environment for rapid prototyping and vi-
sualization of geometric algorithms. The GeoBench is a loosely coupled set of
modules held together by a class hierarchy of geometric objects and common
abstract data types. The program library is a collection of well-tested, practical,
efficient algorithms for basic geometric problems. The XYZ software (written
in Object Pascal for the Macintosh) and documentation is available via anony-
mous ftp from
ftp://ftp.inf.ethz.ch/pub/software/xyz/or
via the World Wide
Web page http://wwwjn.inf.ethz.ch/geobench/XYZGeoBench.html.
5.1 Architecture and Components of the GeoBench
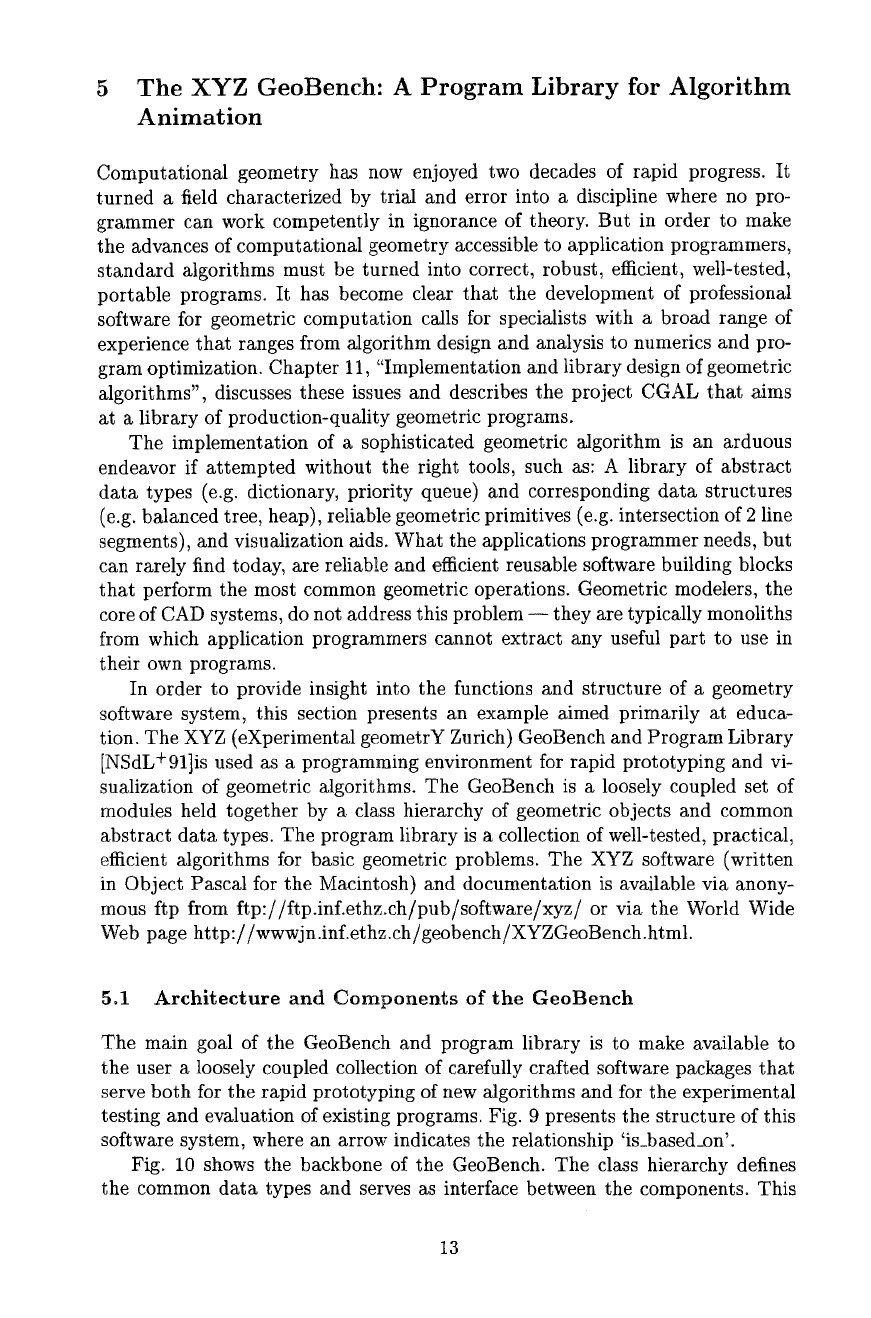
The main goal of the GeoBench and program library is to make available to
the user a loosely coupled collection of carefully crafted software packages that
serve both for the rapid prototyping of new algorithms and for the experimental
testing and evaluation of existing programs. Fig. 9 presents the structure of this
software system, where an arrow indicates the relationship 'is_based_on'.
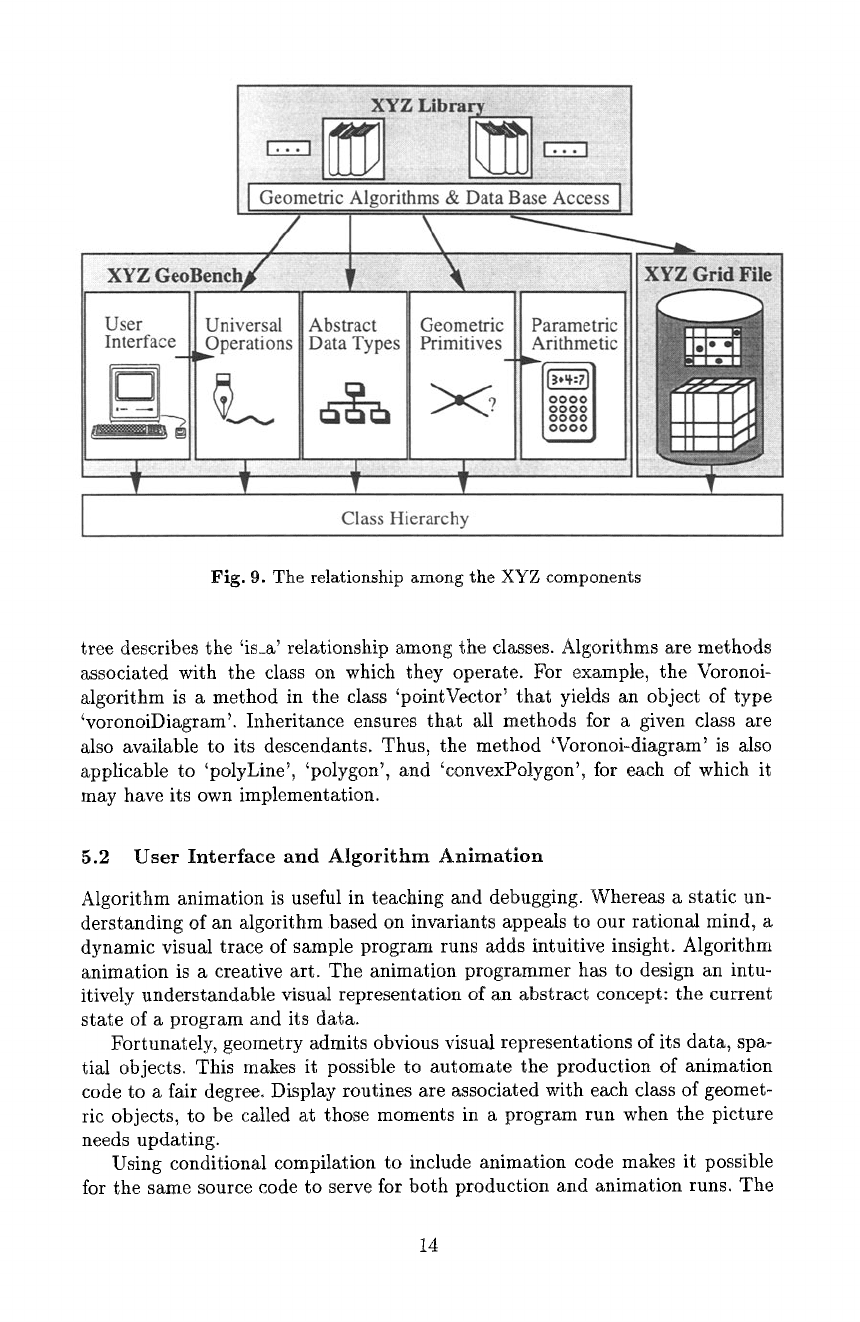
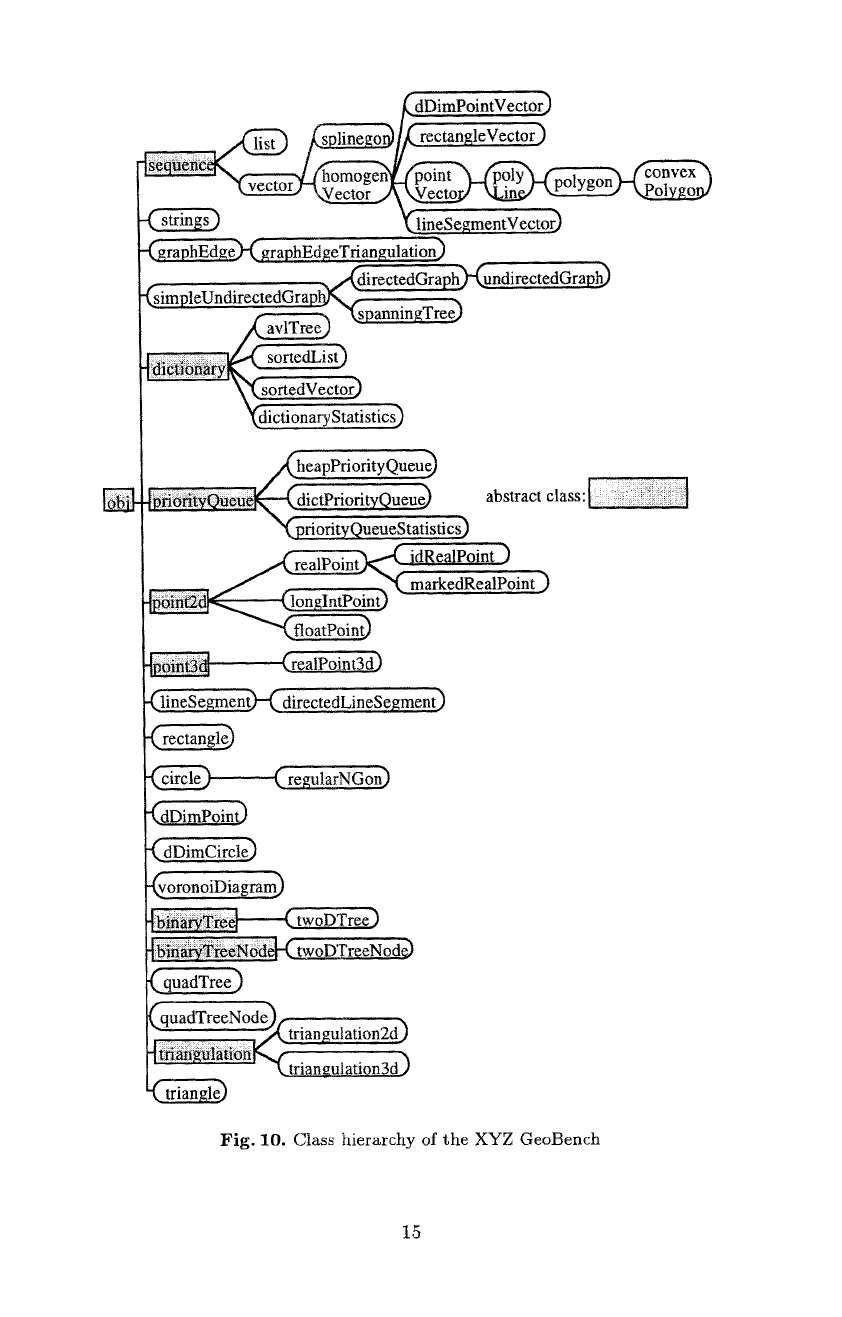
Fig. 10 shows the backbone of the GeoBench. The class hierarchy defines
the common data types and serves as interface between the components. This
13
...................... ................... .................... .................
User Universal Abstract I Geometric [ Parametric ~t ~ ~!
Interface Operations l Data Types " " '~:4"m' ~'~U Primitives~ Arithmetic ~~
bt) I ~ III ~ ,~ L
ooooi
~~
Class Hierarchy ~]
Fig. 9. The relationship among the XYZ components
tree describes the 'is_a' relationship among the classes. Algorithms are methods
associated with the class on which they operate. For example, the Voronoi-
algorithm is a method in the class 'pointVector' that yields an object of type
'voronoiDiagram'. Inheritance ensures that all methods for a given class are
also available to its descendants. Thus, the method 'Voronoi-diagram' is also
applicable to 'polyLine', 'polygon', and 'convexPolygon', for each of which it
may have its own implementation.
5.2 User Interface and Algorithm Animation
Algorithm animation is useful in teaching and debugging. Whereas a static un-
derstanding of an algorithm based on invariants appeals to our rational mind, a
dynamic visual trace of sample program runs adds intuitive insight. Algorithm
animation is a creative art. The animation programmer has to design an intu-
itively understandable visual representation of an abstract concept: the current
state of a program and its data.
Fortunately, geometry admits obvious visual representations of its data, spa-
tial objects. This makes it possible to automate the production of animation
code to a fair degree. Display routines are associated with each class of geomet-
ric objects, to be called at those moments in a program run when the picture
needs updating.
Using conditional compilation to include animation code makes it possible
for the same source code to serve for both production and animation runs. The
14
~(,dDimPointVector)
, lineSegmentVector)
"~ralohEd~e)-(gr aphEd~eTriangulation)
.(simpteUndirectedGra'"'ph-~directedGrai h)'(undirectedGraph~
'~spanningTree)
~(dictionaryStatistics)
jJ(rheaPPriorityQueue)
ifi~NtvOueae~-( dictPrioritvoueu'~ abstract
X priorityQueueStatistics~
~ idRealPoint )
nt)" ~ markedRealPoint )
(realPoint3d)
-(lineSegment)-'(directedLineSegment)
(regularNG0n)
"(dDimPoint)
dDimCir ie)
~oronoiDiagram)
tbili Od~twoDTreeNode~
(quadTree)
(quadTreeNode)¢ . ..,
)4, triangu!ation2dj
.... k.triansmation3dJ
Fig. 10. Class hierarchy of the XYZ GeoBench
15
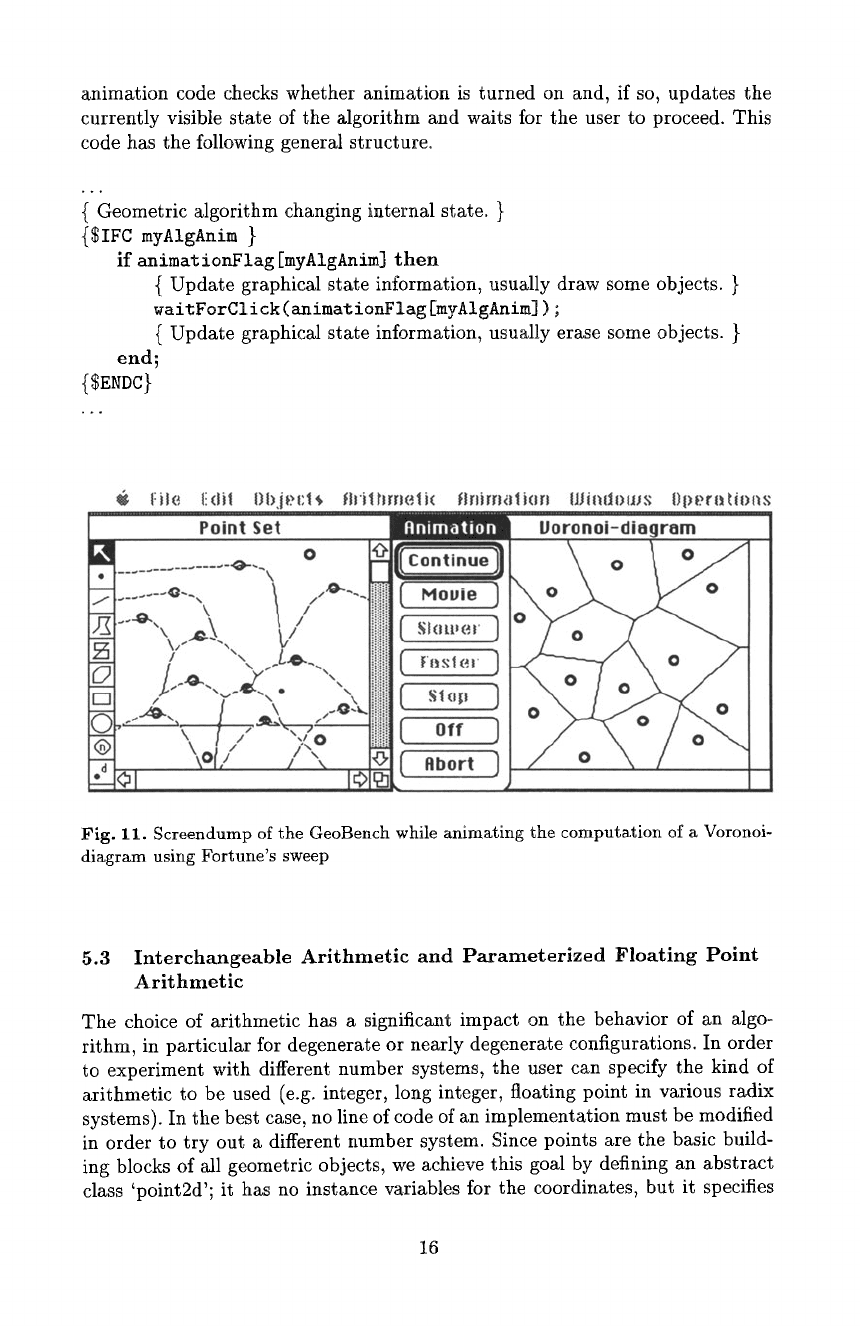
animation code checks whether animation is turned on and, if so, updates the
currently visible state of the algorithm and waits for the user to proceed. This
code has the following general structure.
{ Geometric algorithm changing internal state. }
{$IFC myAlgAnim }
if animat ionFlag [myAlgAnim] then
{ Update graphical state information, usually draw some objects. }
waitForClick (animationFlag [myAlgAnim] ) ;
{ Update graphical state information, usually erase some objects. }
end;
{$ENDC}
7 ..............
Point Set
r ~
;= . / \
...o.~ ( s~<, )
I@_~ \Or,/ / ", [ Abort )
~'¢'1 , , I¢ ,
liZn~H~Z,[,],i Voronoi-diagram
o-~ o -° ° .......
Fig. 11. Screendump of the GeoBench while animating the computation of a Voronoi-
diagram using Fortune's sweep
5.3 Interchangeable Arithmetic and Parameterized Floating Point
Arithmetic
The choice of arithmetic has a significant impact on the behavior of an algo-
rithm, in particular for degenerate or nearly degenerate configurations. In order
to experiment with different number systems, the user can specify the kind of
arithmetic to be used (e.g. integer, long integer, floating point in various radix
systems). In the best case, no line of code of an implementation must be modified
in order to try out a different number system. Since points are the basic build-
ing blocks of all geometric objects, we achieve this goal by defining an abstract
class 'point2d'; it has no instance variables for the coordinates, but it specifies
16
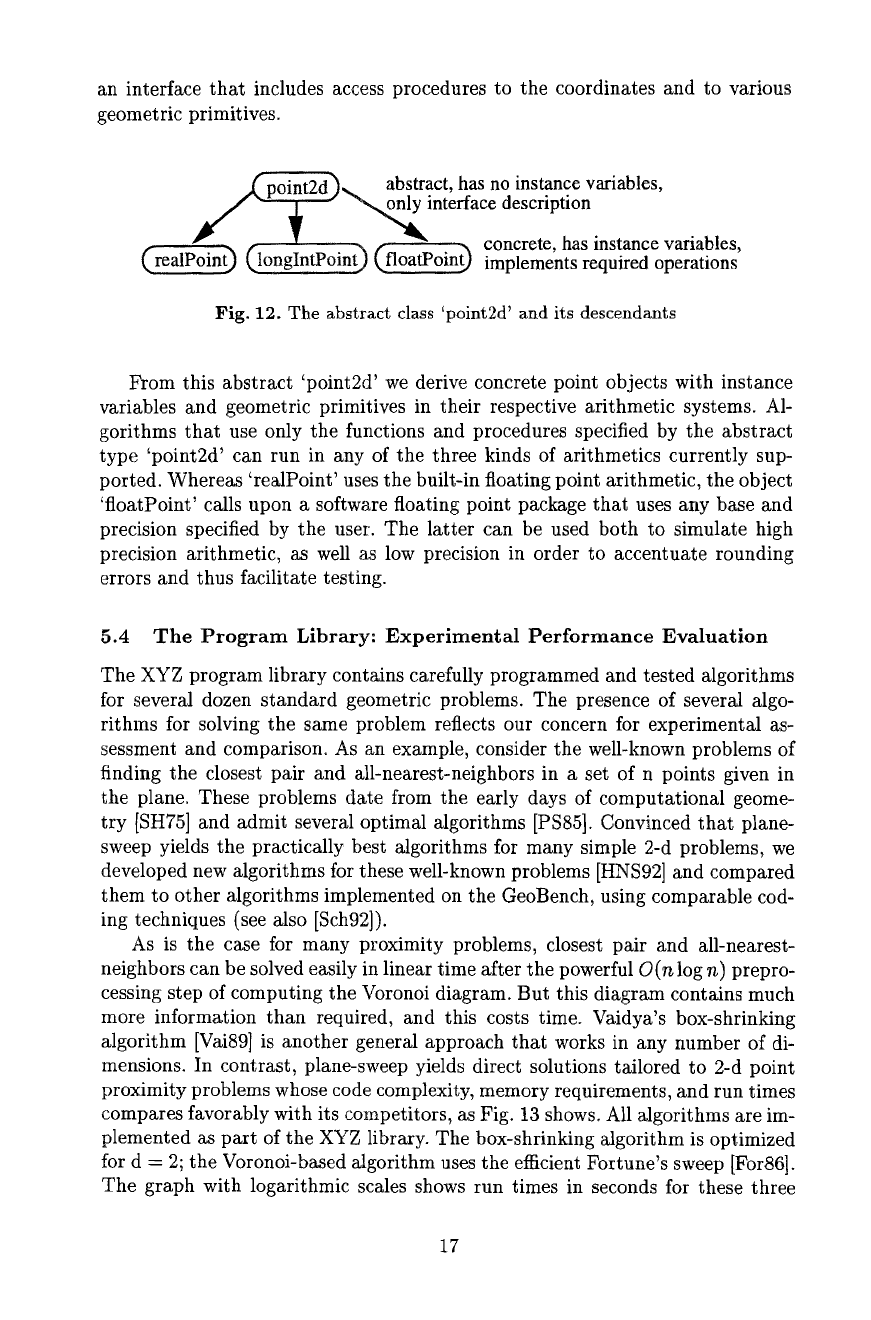
an interface that includes access procedures to the coordinates and to various
geometric primitives.
~~ abstract, has no instance variables,
"~interface description
(realPoint) (longIntP'oint) (floatPoint) concrete, has instance variables,
implements required operations
Fig. 12. The abstract class 'point2d' and its descendants
From this abstract 'point2d' we derive concrete point objects with instance
variables and geometric primitives in their respective arithmetic systems. Al-
gorithms that use only the functions and procedures specified by the abstract
type 'point2d' can run in any of the three kinds of arithmetics currently sup-
ported. Whereas 'realPoint' uses the built-in floating point arithmetic, the object
'floatPoint' calls upon a software floating point package that uses any base and
precision specified by the user. The latter can be used both to simulate high
precision arithmetic, as well as low precision in order to accentuate rounding
errors and thus facilitate testing.
5.4 The Program Library: Experimental Performance Evaluation
The XYZ program library contains carefully programmed and tested algorithms
for several dozen standard geometric problems. The presence of several algo-
rithms for solving the same problem reflects our concern for experimental as-
sessment and comparison. As an example, consider the well-known problems of
finding the closest pair and all-nearest-neighbors in a set of n points given in
the plane. These problems date from the early days of computational geome-
try [SH75] and admit several optimal algorithms [PS85]. Convinced that plane-
sweep yields the practically best algorithms for many simple 2-d problems, we
developed new algorithms fbr these well-known problems [HNS92] and compared
them to other algorithms implemented on the GeoBench, using comparable cod-
ing techniques (see also [Sch92]).
As is the case for many proximity problems, closest pair and all-nearest-
neighbors can be solved easily in linear time after the powerful
O(n
log n) prepro-
cessing step of computing the Voronoi diagram. But this diagram contains much
more information than required, and this costs time. Vaidya's box-shrinking
algorithm [Vai89] is another general approach that works in any number of di-
mensions. In contrast, plane-sweep yields direct solutions tailored to 2-d point
proximity problems whose code complexity, memory requirements, and run times
compares favorably with its competitors, as Fig. 13 shows. All algorithms are im-
plemented as part of the XYZ library. The box-shrinking algorithm is optimized
for d = 2; the Voronoi-based algorithm uses the efficient Fortune's sweep [For86].
The graph with logarithmic scales shows run times in seconds for these three
17