Tong W. Wind Power Generation and Wind Turbine Design
Подождите немного. Документ загружается.

Intelligent Wind Power Unit with Tandem Wind Rotors 345
that both torques show the same absolute value irrespective of the relative rota-
tional speed and the output/load, because the rotational torque should be always
dynamically counter-balanced between the inner and the outer armatures.
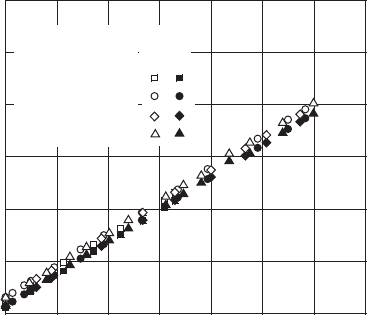
Figure 19 shows the rotational torques T
F
and T
R
at the various relative speeds
N
T
against the induced electric current I
G
, where these torques include the mechan-
ical torques in the generator and T
R
is given by the absolute value. That is, these
are the shaft torques in practical use. The rotational torques of both shafts T
F
, T
R
are directly proportional to the induced electric current I
G
irrespective of the rota-
tional speeds and/or the external load but the shaft torque T
F
of the outer armature
is slightly larger than T
R
of the inner armature due to the mechanical torque of the
larger bearings.
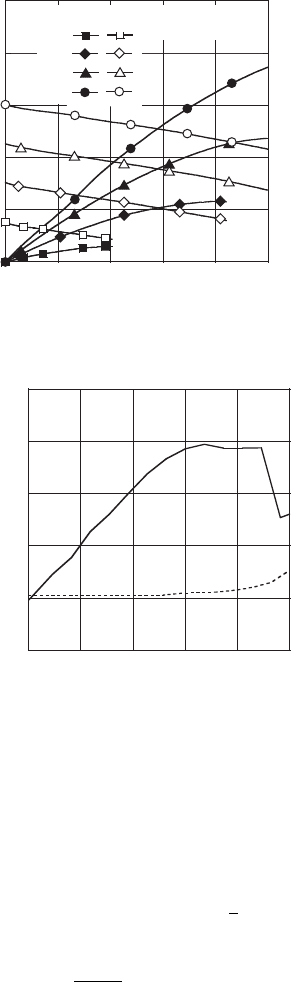
The output P and the induced voltage E against the induced electric current I
G
are determined by the relative rotational speed N
T
(= N
F
− N
R
), as shown in Fig. 20 .
The output increases with the increase of the induced voltage E at the same I
G
,
while E is proportional to the relative rotational speed N
T
and I
G
determines the
rotational torque as presented in Fig. 19 .
5 Demonstration of intelligent wind power unit
5.1 Preparation of the tentative tandem wind rotors
5.1.1 Front blade design
Figure 21 shows the drag and the lift coeffi cients C
D
, C
L
against the angle of attack
a for MEL012 aerofoil [ 10 ]. The angle giving the maximum C
L
is a = 11°, but the
angle a = 8° was chosen as the design dimension irrespective of the radial position,
so as to avoid the fl ow stall on a large scale at the lower rotational speed. The chord
of the blade was designed taking the traditional blade element theory [ 11 ] into
0
4
8
12
16
20
24
02468101214
T
R
, -T
F
N.m
I
G
A
min
-1
min
-1
min
-1
300 150 -150
900 150 -750
900 750 -150
1500 750 -750
N
T
N
F
N
R
T
F
-T
R
Figure 19: The output and the induced voltage against the induced electric current.
346 Wind Power Generation and Wind Turbine Design
-0.5
0
0.5
1
1.5
2
-5 0 5 10 15 20
C
L
, C
D
a
deg.
C
L
C
D
Figure 21 : Drag and lift coeffi cient against the attack angle.
0
0.2
0.4
0.6
0.8
1
0
20
40
60
80
100
0246810
P kW
E V
I
G
A
-150
-350
-550
-750
N
F
= 50 min
-1
N
R
P E
P
E
Figure 20: The output and the induced voltage against the induced electric current.
account. The fl ow through the wind rotor is contributed by the axial and the tan-
gential induction factors (wind velocity deceleration ratio), and the relative fl ow
angle at the inlet of the front wind rotor
f
F
measured from the tangential direction
and the chord C at the radius r are given as follows [ 12 ], where l
r
is the speed ratio
at the radius r [=(rotational speed at r )/wind velocity].
1
2
Fr
3
tan (1/ ),KKl
−
==f
(1)
[]
Fin
FL
8
1cos( )
r
C
ZC
p
=−f
(2 )
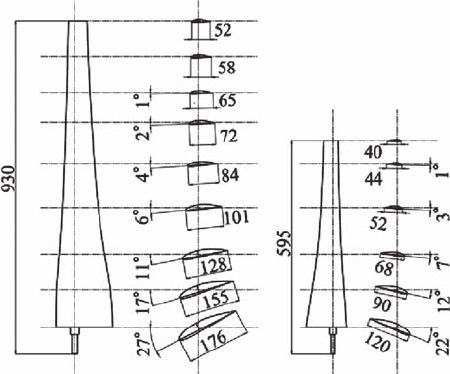
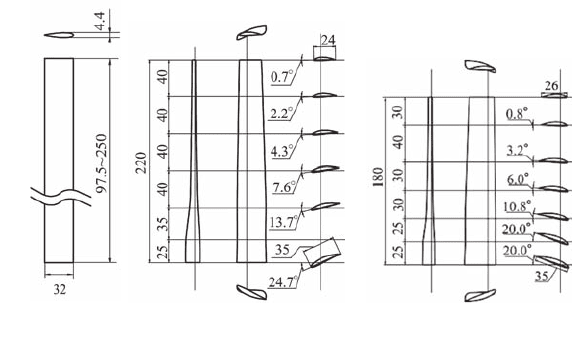
Figure 22 shows the blade profi le with MEL012 aerofoil elements [ 10 ] which is
designed by the above procedures.
Intelligent Wind Power Unit with Tandem Wind Rotors 347
5.1.2 Rear blade design
The counter-rotational torque of the rear wind rotor must coincide with the rotational
torque of the front wind rotor designed above, but the convenient design procedures
for the rear blade interacting with the front wind rotor is not yet known. Accord-
ingly, the fl ow around the front wind rotor was simulated by the commercial CFD
code CFX-10 with k – ε turbulent model, to get the inlet fl ow condition of the rear
wind rotor. In the simulation, the circularly cylindrical fi eld with 20 d
F
radius ( d
F
:
the diameter of the front wind rotor) was set, and was divided into two domains.
One is the rotational domain surrounding the wind rotor with 80,668 tetra-type ele-
ments (mesh size is 0.5 mm in close to the blade surface) and 6294 prism-type
elements in the radial direction with 2 d
F
, while 1 d
F
upstream and 3 d
F
downstream
of the rotor. The other is the stationary domain with 799,060 prism-type elements
surrounding the rotational domain, and both domains were joined with the Frozen-
Rotor interface keeping the relative blade position of the tandem wind rotors. The
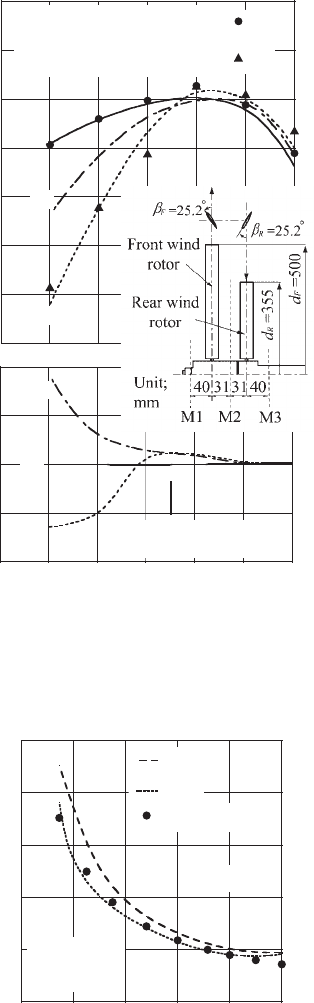
fl ow around the tandem wind rotors with two-dimensional blades was simulated
in a trial by the above code and is shown in Fig. 23 accompanied with the plotted
experimental results, where V
Mtm
and V
θ tm
are the axial and the swirling velocity
components divided by the wind velocity V at the wind tunnel outlet, R is the dimen-
sionless radius divided by d
F
/2, Z
F
and Z
R
are the blade numbers of the front and the
rear wind rotors, and the measurement sections M1–M3 and the blade profi le are
also given in the fi gure. It was confi rmed that the above code can predict roughly the
actual axial velocity, and the fl ow conditions are discussed in [ 13 ].
The fl ow around the front wind rotor equipped with three blades shown in Fig. 22
was simulated by the above code. Figure 24 shows the relative fl ow angles measured
from the tangential direction, where
f
Fin
and
f
Fout
are the simulated relative fl ow
angles averaged in the tangential directions at the inlet and the outlet sections of the
Front blade Rear blade
Figure 22 : Blade profi les of the tandem wind rotors.
348 Wind Power Generation and Wind Turbine Design
0
10
20
30
40
50
0 0.2 0.4 0.6 0.8 1
f
Fin
, f
Fout
R
f
Fin
f
Fout
Z
F
= 3
f
F
by eq. (1)
V = 8 m/s
N
F
= 400 min
-1
Figure 24 : Relative fl ow angles measured from the tangential direction.
Figure 23: Flow around the tandem wind rotors composed of two-dimensional
blades.
-0.4
-0.2
0.0
0.2
0.4
0 0.2 0.4 0.6 0.8 1 1.2
V
?
tm
Tip of
rear rotor
Tip of
front rotor
R
M1
M2
M3
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
V
Mtm
N
F
=850 [min
-1
] V=11 [m/s]
N
R
=-640 [min
-1
] Z
F
=3 Z
R
=5
M1
M2
M3
M1
M3
Intelligent Wind Power Unit with Tandem Wind Rotors 349
front wind rotor,
φ
F
is the outlet fl ow angle determined by eqn (1) at each radial
position of the front blade. The angle
φ
F
is close to
φ
Fout
, that is,
φ
F
may give the
outlet fl ow angle. Accordingly, the rotational torque of the rear wind rotor, namely
the angular momentum change, was determined with the simulated outlet fl ow angle
φ
Fout
of the front wind rotor, which is corresponding to the inlet fl ow angle of the rear
wind rotor, and the outlet fl ow angle of the rear wind rotor predicted by eqn (1).
Figure 22 also shows the designed rear blade with MEL012 aerofoil elements
[ 10 ], where the chord is also derived from eqn (2) but the height was determined
tentatively.
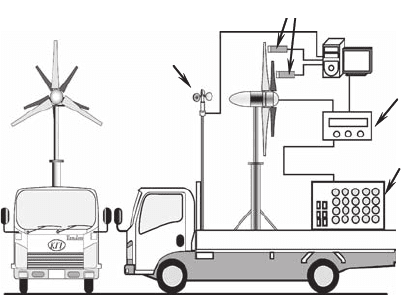
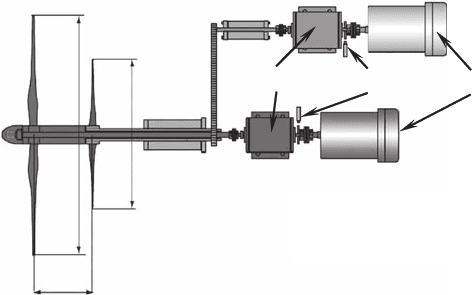
5.2 Preparation of the model unit and operations on the vehicle
The synchronous generator ( Fig. 16 ) equipped with the tentative tandem wind
rotors ( Fig. 22 ) were mounted on the circularly cylindrical tower as the down-
wind type, and boarded on the pick-up type truck as shown in Fig. 25 . The wind
velocity can be controlled by the driving speed of the truck, and also measured
by the cup-type anemometer. The rotational speeds of the wind rotors, the output,
the induced voltage and the induced electric current were automatically accumu-
lated and stored in the personal computer every one second, in accompanying
with the data of the wind velocity. The output was consumed by many bulbs, but
these resistances depend mainly on the induced voltage, namely the rotational
speed, and the induced electric current affecting the temperature of the fi lament.
Therefore, the resistance was replaced by the specifi ed power of the bulb at 100 V,
P , called “bulb load” as the indication for the external load.
The driving site is at the seashore of Wakamatsu, Kitakyushu, Japan, where there are
two straight roads of about 1.5 km in the north–south and the east–west directions. The
wind is calm and its direction is nearly constant, that is, the site is suitable for making
the experiments using the truck. The truck is used to be driven in three modes, which
are the acceleration, steady state, then the deceleration. Figure 26 shows one of the
rotational speeds of the front and the rear wind rotors N
F
, N
R
, and the wind velocity V
Anemometer
Power mete
r
Bulb load
Tachometer
Figure 25: Field experiment on the pick-up type truck.
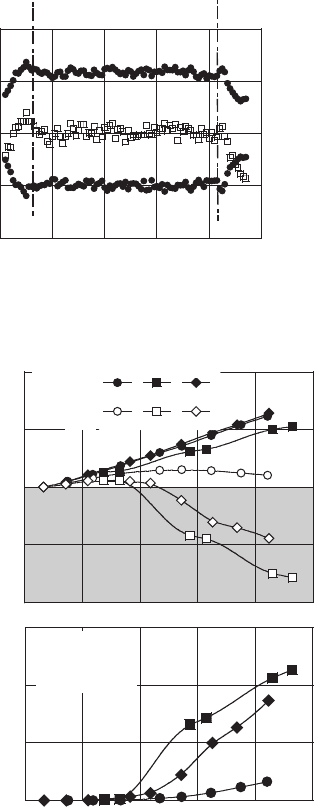
350 Wind Power Generation and Wind Turbine Design
accumulated from start to stop of the truck. The data corresponding to the
acceleration and deceleration of the truck were excluded for the evaluations of the
experimental data, in order to get the results at the steady-state fl ow conditions.
5.3 Performances of the tandem wind rotors
The effects of the rear blade setting angle b
R
on the performances are shown
in Fig. 27 , in keeping the front blade setting angle b
F
= 20° and the bulb load
0
7.5
15
22.5
30
-600
-300
0
300
600
020406080100
V m/s
N
F
, N
R
min
-1
Measurement time Sec
N
F
N
R
V
Acceleration
DecelerationSteady State
Figure 26 : Accumulated rotational speeds while driving the truck.
-1000
-500
0
500
1000
N
F
, N
R
min
-1
b
R
deg. 10 20 30
N
F
N
R
N
R
N
F
, P
0
300
600
900
048121620
P W
V m/s
b
F
= 20deg.
P
bulb
= 900W
Figure 27: Effect of the blade setting on the performance.
Intelligent Wind Power Unit with Tandem Wind Rotors 351
P
bulb
= 900 W, where the blade settings are defi ned as shown in Fig. 28 at the
blade tips. The rear wind rotor never counter-rotates against the front wind rotor
at the lower wind velocity V because not only the rear wind rotor cannot generate
the suffi ciently counter-rotational torque T
R
corresponding to T
F
of the front wind
rotor but also the outer armature pulls the inner armature by the magnetic force.
With the increase of the wind velocity, the rear wind rotor with b
R
larger than 20°
begins to counter-rotate successfully. On the contrary, the rear wind rotor with b
R
=
10° never change the rotational direction and is in the blowing mode because the
rear blade with the excessively larger angle of attack cannot generate the fruitful
counter-rotational torque due to the fl ow stall on larger scale. Judging from the
counter-rotation expected to this type unit, the rear wind rotor with b
R
= 20° may
be acceptable within the measured data.
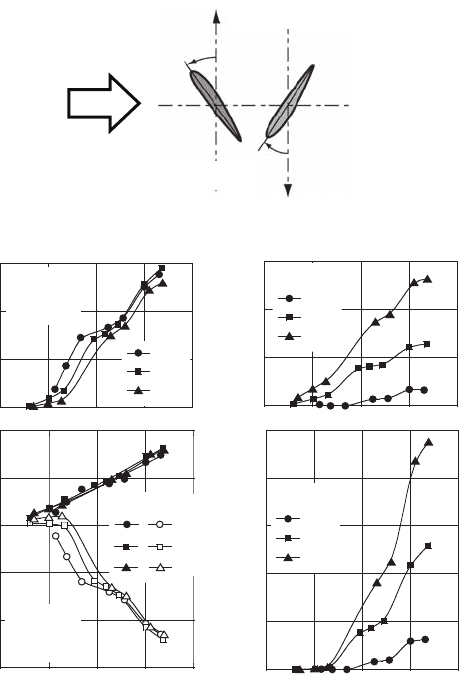
Figure 29 shows the effect of the bulb load on the operating conditions at the blade
setting angles b
F
= b
R
= 20°. The load P
bulb
affects obviously the rotational speed of
Wind direction
Front Rotor
Rear Rotor
b
F
b
R
Figure 28: Blade setting angles.
-900
-600
-300
0
300
600
0 5 10 15 20
N
F
, N
R
min
-1
V m/s
N
F
N
R
b
F
=20deg.
b
R
=20deg.
60
423
1023
N
F
N
R
P
bulb
0
150
300
450
600
750
0 5 10 15 20
60
423
1023
P W
V m/s
P
bulb
0
30
60
90
60
423
1023
E V
b
F
=20deg.
b
R
=20deg.
P
bulb
0
2
4
6
60
423
1023
I
G
A
P
bulb
Figure 29 : Effect of the bulb load on the operation conditions.
352 Wind Power Generation and Wind Turbine Design
the rear wind rotor N
R
in the lower wind velocity than 12 m/s, but scarcely affects the
speed of the front wind rotor N
F
regardless of the wind velocity V . Besides, the rear
wind rotor starts to counter-rotate at the slower wind velocity with the decrease of
the bulb load. The relative rotational speed N
T
= N
F
− N
R
contributes proportionally
to the induced voltage E , the induced electric current I
G
depends on the load, and the
output P is obtained electrically from √ 3 EI , while given mechanically by Tw
T
( T =
T
F
= − T
R
, w
T
: the relative angular speed). Within the measured data, the operating
condition with the bulb load 1023 W gives the higher output P .
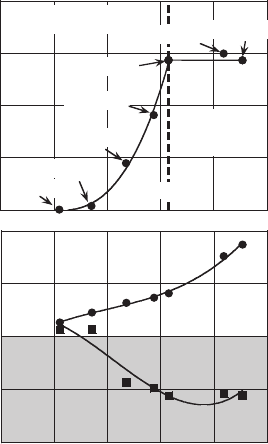
5.4 Trial of the reasonable operation
As recognized in the above discussions, the performances are affected not only by
the wind velocity V but also by the blade setting angles b
F
, b
R
and the bulb load.
Then, this wind power unit was operated impractically but reasonably, in trail, by
changing the rear blade setting angle b
R
and the bulb load, while keeping the front
blade setting angle b
F
= 20°. The output was kept constant at P = 430 W in the
wind velocity higher than V = 12.6 m/s, and the unit was operated at the optimum
rotational speed giving the maximum output in the slower wind velocity. Figure 30
shows the reasonable operation, where the adjusted rear blade setting angle and
bulb load are denoted with ( b
R
(°), P
bulb
(W)), and the experimental data are plot-
ted and represented by the curve. The bulb load P
bulb
is not related directly to the
output P because the bulb resistances are affected by the fi lament temperature
0
150
300
450
600
P W
(30,600)
(30,723)
(20,1023)
(30,1023)
(20,725)
(b
R
deg., P
bulb
W)
b
F
=20deg.
P=430 W
(30,900)
V=12.6 m/s
(20,900)
-800
-400
0
400
800
048121620
N
F
, N
R
min
-1
V m/s
N
F
N
R
Figure 30 : Trial of the reasonable operations.
Intelligent Wind Power Unit with Tandem Wind Rotors 353
as mentioned before. This type unit may be successfully operated by adjusting
suitably the blade setting angle and the external load. Such operations, however,
are not expected and not acceptable for the proposed wind power unit because the
rotational speeds must be adjusted automatically in response to the wind velocity.
The fi nal target of the serial researches is to get smartly the above operation by the
superior works of the tandem wind rotors in cooperation with the double arma-
tures of the generator presented before. Consequently, it is necessary to improve
more and more the blade profi les suitable for the front and the rear wind rotors.
6 Optimizing the profi les of tandem wind rotors
The tandem wind rotors have been investigated as reviewed before. In the proposed
tandem wind rotorts, however, the rear wind rotors must counter-rotate against the
front wind rotor, stop, and rotate in the same direction of the front wind rotor, with
the increase of the wind velocity. This chapter is the status report for optimizing
the wind rotor profi les. The authors pay attention, here, not only to the wind rotor
profi les but also to the arrangements between both wind rotors.
6.1 Experiments in the wind tunnel
The diameter of the front wind rotor was kept constant at d
F
= 500 mm, and the
diameter of the rear wind rotor was changed from d
R
= 260 to 560 mm, for the
experiments in the wind tunnel. The axial distance between the front and the rear
wind rotors (the twist centres of the blade) was also changed from l = 40 to 200 mm.
The blade profi les of the front and the rear wind rotors are shown in Fig. 31 .
The blade E is supplied to the front and/or the rear wind rotors, and has not the
camber and the twist. The front blade G is formed with MEL002 aerofoil elements
[ 10 ] and has the twist to get the desirable angle of attack a = 7°, as the single wind
Rear blade G
Unit: mm
Front blade G
Front and/or Rear
blade E
Figure 31: Blade profi les of model tandem wind rotors.
354 Wind Power Generation and Wind Turbine Design
rotor with the blade tip speed ratio l = 6 [=(blade tip speed)/(wind velocity)]. The
rear blade G is also formed with MEL002 and is twisted taking account of the fl ow
behind the front wind rotor. The front and the rear blade numbers are Z
F
= 3, Z
R
= 5
which are optimized in the previous paper [ 13 ]. Hereafter, the tandem wind rotors
are called “Tandem wind Rotor EE” which is composed of the front blade E and
the rear blade E, where the front and the rear blade setting angles are b
F
= b
R
= 11°
(see Fig. 28 ). “Tandem Wind Rotor GE” is composed of the front blade G and the
rear blade E, while b
F
= 10°, b
R
= 16°. “Tandem Wind Rotor GG” is composed of
the front blade G and the rear blade G, while b
F
= 5°, b
R
= 15°. “Single Wind Rotor
G” consists of with the front blade G, while b
F
= 0°. These blade setting angles
were optimized at the preliminary experiments [ 14 , 15 ].
The model wind rotors shown in Fig. 32 were set perpendicular to the wind
direction, at 185 mm downstream of the wind tunnel outlet with the nozzle diam-
eter of 800 mm. The front and the rear wind rotors were connected directly and
respectively to the isolated motor with the inverter, in place of the peculiar generator.
The rotational torques of the front and the rear wind rotors were counter-balanced
by the rotational speed control. The performances of the model wind rotor in the
following discussions are evaluated without the mechanical torques of the bear-
ings and the pulley system. The fl ow conditions discharged from the wind tunnel
outlet, namely the inlet fl ow conditions of the wind rotors, are almost uniform and
axis-symmetry without the swirl.
The outputs of the model wind rotors may be smaller than those of the proto-
types, as the Reynolds number estimated at the front blade tip is (0.8–2.2) × 10
5
in
the experiments.
6.2 Optimum diameter ratio of front and rear wind rotors
To know the optimum diameter ratio D
RF
[= d
R
/ d
F
], the performances of the tan-
dem wind rotors were investigated by changing the diameter of the rear wind rotor,
and are shown in Fig. 33 . The output coeffi cient is defi ned by C
P
= P /( r AV
3
/2) and
d
R
l
(C)
(B)
(A)
(A): Torque meter
(B): Tachometer
(C): Motor
d
F
= 500 mm
Figure 32: Model tandem wind rotors for performance experiment.