Тимофеев А.С. Цифровые устройства и микропроцессоры по дисциплине Микропроцессорные устройства: учебное пособие
Подождите немного. Документ загружается.

Особенно удобно разработчику, если нужно изменить набор
команд ЭВМ. Обычно, достаточно изменить некоторые
микрокоманды и добавить новые к имеющемуся набору команд.
Для систем на основе разрядно-модульного МП отметим
следующие достоинства:
1.Достигается наибольшее быстродействие системы,
построенной на основе МП с микропрограммным управлением.
2.Используется специализированная система команд,
наиболее соответствующая потребностям решаемой задачи.
3.Достижима любая разрядность информационных шин,
обеспечивающая оптимальную скорость передачи информации в
системе.
Для систем разрядно–модульной архитектуры характерны
некоторые недостатки, которые нужно учитывать при выборе типа
микропроцессора для разработки прикладной системы:
1.Высокая специализация МП системы требует сложного,
дорогого и длительного цикла проектирования системы.
2.Невозможно использовать при проектировании системы
стандартные конструктивные решения. Это объясняется
уникальностью каждой решаемой задачи.
3.Специализированная система команд не позволяет
использовать имеющиеся библиотеки подпрограмм, средства
трансляции, программные и аппаратные средства эмуляции и
моделирования работы МП и компонентов системы и т.д.
Таким образом, системы на базе МП с микропрограммным
управлением, с разрядно-модульной организацией имеют
наибольшее быстродействие, оптимальную разрядность шин для
передачи и приема данных и эффективную систему команд,
ориентированную на решаемую задачу. Платой за это оказывается
более высокая сложность и стоимость разработки всей системы,
отсутствие готовых конструктивных решений, высокие требования
к квалификации разработчиков, сложность изготовления и
индивидуальность проблем эксплуатации устройства, связанные с
уникальностью каждой системы.
2.3 Контрольные вопросы
21
1. Объясните различия между микропроцессорами с
фиксированной системой команд и с микропрограммным
управлением.
2. Как расшифровывается термин «разрядно – модульная
организация микропроцессора»?
3. Объясните достоинства микропроцессорных систем на
основе МП с фиксированной системой команд.
4.Чем нужно обосновать выбор разработчика МП системы
при определении необходимого для решения задачи типа
микропроцессора.
5. Почему нельзя использовать для всех задач единую
структуру МП системы с разрядно-модульной организацией?
МИКРОПРОЦЕССОР КР580ИК80
3 МИКРОПРЦЕССОР КР580ИК80
3.1 Архитектура микропроцессора КР580ИК80
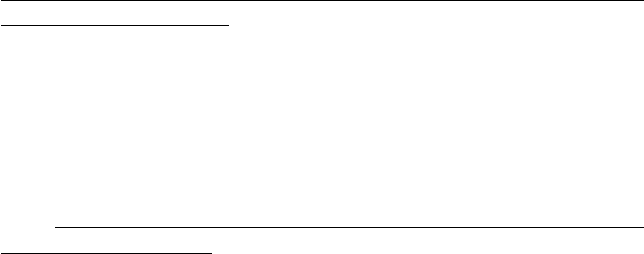
Восьмиразрядный однокристальный микропроцессор
КР580ИК80 с фиксированной системой команд предназначен для
построения систем обработки данных, применяемых в устройствах
автоматики, контроллерах и микро-ЭВМ. Он размещается в
пластмассовом корпусе с 40 выводами (рисунок 3.1). Потребляемая
мощность 750 мВт, напряжения питания +5 В, -5В и +12В, тактовая
частота составляет 2,5 МГц. Микропроцессор КР580ИК80 имеет 8-
ми разрядную шину данных, обозначенную как ШД0 – ШД7, 16-ти
разрядную шину адреса ША0 – ША15 и набор сигналов
управления, обозначаемых как шина управления (ШУ).
Микропроцессор КР580ИК80 (рисунок 3.2) имеет 8-ми
разрядную внутреннюю шину данных, к которой подключены
элементы структуры МП. Для обмена информацией между
внутренней шиной данных и шиной данных микропроцессорной
системы ШД0-ШД7 используется буферный регистр данных.
22
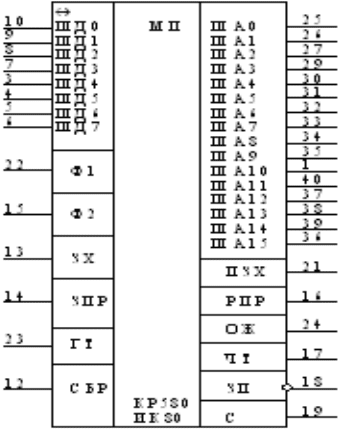
Рисунок 3.1 − Нумерация выводов Р580ИК80
Шина адреса ША0 – ША15 позволяет МП адресовать до
65536 8-ми разрядных ячеек памяти (64 Кбайт). Шина адреса
управляется через буферный регистр адреса. Буферные регистры
данных и адреса имеют выходы с тремя состояниями. Два
состояния связаны с нулевым и единичным уровнями сигнала, а в
третьем состоянии регистры имеют высокое выходное
сопротивление. Третье состояние позволяет отключать
микропроцессор от внешних шин системы. Такое отключение
используется при реализации режима прямого доступа к памяти
(ПДП), выполняемого внешними устройствами и позволяющего
записывать и считывать информацию в память/из памяти МП
системы без обращения к микропроцессору.
Блок регистров общего назначения РОН включает шесть 8-ми
разрядных регистров, имеющих название B,C,D,E,H,L, которые
называются регистрами общего назначения. Регистры могут
использоваться либо как самостоятельные регистры, либо как 16-ти
разрядные регистровые пары (B-C, D-E, H-L). Регистры W и Z
программно недоступны и используются для хранения
промежуточных результатов при выполнении команд.
23
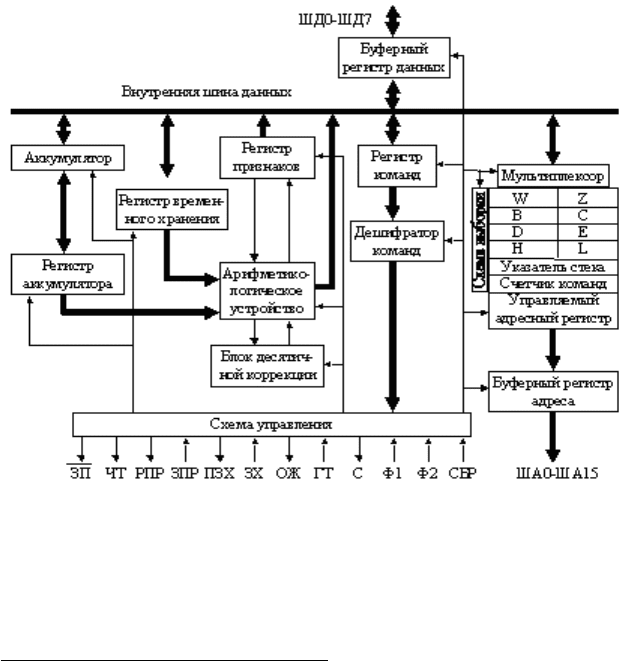
Рисунок 3.2 − Структурная схема КР580ИК80
Управляемый адресный регистр предназначен для приема
информации из других регистров и передачи ее в буферный регистр
адреса. В блок регистров входят также 16-ти разрядный счетчик
команд (СК) и 16-ти разрядный регистр – указатель стека (УС).
Мультиплексор и схема выборки предназначены для управления
выбором регистра при чтении или записи информации с
внутренней шины данных.
Аккумулятор и регистр аккумулятора образуют регистр A,
который по умолчанию используется в большинстве команд, как
источник операнда и как приемник результата операции.
Восьмиразрядное арифметико-логическое устройство
(АЛУ) предназначено для выполнения арифметических и
логических операций над двоичными операндами, один из которых
располагается в аккумуляторе, а другой считывается из регистра
временного хранения. В регистр временного хранения байт, в
зависимости от кода команды, поступает из блока регистров, из
внешней памяти или из второго байта команды. Результат
24
арифметико-логической операции поступает на внутреннюю шину
данных или записывается в аккумулятор.
Блок десятичной коррекции используется при выполнении
операций с двоично-десятичными операндами для перевода
результата операции в двоично-десятичную форму.
Регистр признаков содержит однобитовые флаги,
фиксирующие информацию о результате операции в АЛУ (таблица
3.1).
Таблица 3.1 − Флаги регистра признаков
Имя
флага
Название Назначение
Z
Нуль
(ZERO)
Z=1 при нулевом результате операции в АЛУ
Z=0 при ненулевом результате операции
C
Перенос
(CARRY)
C=1 при возникновении переноса или заема в
старшем бите результата операции C=0 при
отсутствии переноса или заема
S Знак (SIGN)
S=1 при отрицательном результате операции S=0
при положительном результате операции
P
Четность
(PARITY)
P =1 при четном числе 1 в байте результата P =0
при нечетном числе 1 в байте результата
AC
Дополнит.
перенос
(AUXIL.
CARRY)
AC=1 при возникновении переноса или заема
между тетрадами результата операции AC=0 при
отсутствии переноса или заема
Регистр команд предназначен для хранения кода команды,
считанного из внешней памяти.
Дешифратор команд анализирует поступившую команду и
передает информацию о типе команды, количестве операндов и
другую необходимую информацию в устройство управления.
Устройство управления синхронизирует и управляет
работой всех компонентов МП. На него поступают сигналы о
состоянии внешних устройств. Само устройство управления
подключено ко всем компонентам микропроцессора.
Дешифрированный код команды задает в устройстве управления
25
необходимый алгоритм управления внутренними и внешними
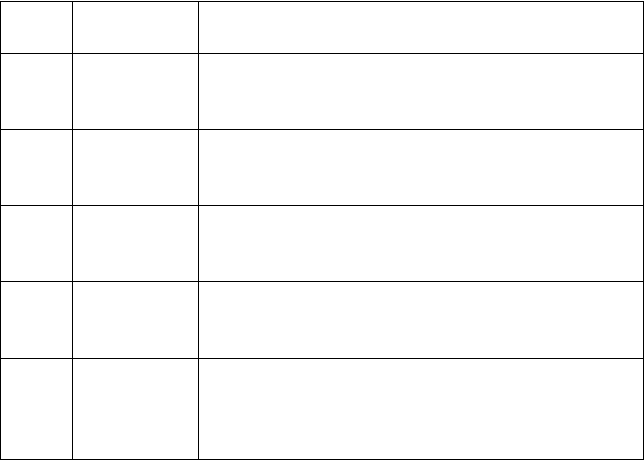
компонентами. Часть сигналов с устройства управления являются
выходными и предназначены для управления внешними
компонентами системы. Управляющие сигналы, входящие в шину
управления, можно условно разделить на подгруппы по
выполняемым функциям (таблица 3.2).
Таблица 3.2 − Управляющие сигналы МП КР580ИК80
Имя Направление Назначение
Сигналы управления шинами
ЧТ Выход Чтение информации с шины данных в МП
ЗП Выход Выдача информации из МП на шину данных
Сигналы управления прерываниями
ЗПР Вход Запрос прерывания от внешнего устройства
РПР Выход
Разрешение прерывания. Соответствует
состоянию внутреннего триггера разрешения
прерывания
Сигналы управления работой с медленными внешними
Устройствами
ГТ Вход
Информация для обмена МП с ЗУ или
внешним устройством готова. При ГТ=0 МП
переходит в ожидание
ОЖ Выход МП находится в состоянии ожидания
Сигналы управления прямым доступом к памяти
ЗХ Вход
Запрос на захват шин от внешнего
устройства
ПЗХ Выход
Подтверждение захвата. Шины ША и ШД
отключены
Сигналы общего назначения
С Выход
Начало машинного цикла. На ШД выдано
управляющее слово
Ф1,Ф2 Вход Тактовые импульсы для синхронизации
СБР Вход
Сброс. Обнуляется счетчик команд, триггеры
разрешения прерывания и захвата шин
Кроме динамических сигналов управления, МП формирует
специальное управляющее слово (слово состояния), которое
определяет тип машинного цикла, выполняемого в данный момент
времени. Машинный цикл работы МП включает от трех до пяти
26
тактов (Т
1
, Т
2
, Т
3
, Т
4
и Т
5
). Каждая команда состоит от 1 до 3-х
машинных циклов (М
1
, М
2
и М
3
), в зависимости от длины
команды и реализуемых операций. При выполнении команды в
такте Т
1
содержимое счетчика команд выдается на шину адреса
ША. В этом же такте МП выдает на шину данных ШД
управляющее слово – слово состояния и формирует специальный
сигнал С, по которому это слово записывается в буферный регистр
внешней схемы управления. Управляющее слово указывает тип
текущего машинного цикла. В такте Т
2
счетчик команд
увеличивается на 1 и анализируются управляющие сигналы ГТ и
ЗХ. В зависимости от состояния этих сигналов производится либо
переход к такту Т
3
машинного цикла, либо переход в состояние
ожидания Т
ож
и Т
ож зх
, выход из которых происходит только при
поступлении внешних управляющих сигналов. В такте Т
3
на шину
данных ШД принимается байт из внешнего устройства или ЗУ и
записывается в регистр команд (если идет выборка команды), или в
один из регистров МП. Если необходимы действия над операндами,
то вводятся дополнительные такты Т
4
и Т
5
и операции выполняются
в этих тактах. В любом случае, после завершения текущего
машинного цикла происходит переход к такту Т
1
следующего
машинного цикла. В последнем такте последнего цикла команды и
в состоянии Т
ож
выполняется проверка уровня сигнала на входе
запроса прерывания ЗПР. Если уровень сигнала высок, а триггер
разрешения прерывания установлен, МП переходит к
обслуживанию прерывания. Установка и сброс триггера
разрешения прерывания осуществляется программно, командами EI
(разрешить прерывания) и DI (запретить прерывания). При
обслуживании прерывания в стеке запоминается содержимое
счетчика команд. В такте Т
3
обслуживания прерывания, устройство,
запросившее прерывание, подает на шину данных команду
перехода на адрес программы обслуживания прерывания. Данный
адрес, называемый вектором прерывания, загружается в счетчик
команд и МП начинает выполнять программу обслуживания
прерывания. Когда программа завершается по команде RET, из
стека считывается запомненный адрес выполняемой перед
прерыванием команды и МП возвращается к основной работе. Для
построения микропроцессорной системы на базе КР580ИК80
27

существует микросхемы МП-комплекта КР580. Система строится
подобно укладке кубиков конструктора (рисунок 3.3).
Постоянное запоминающее устройство (ПЗУ)
предназначено для хранения программ, таблиц преобразования и
констант. ПЗУ может быть выполнено на любых микросхемах
памяти, в которых информация сохраняется после выключения
питающего напряжения. Необходимость хранения программы в
энергонезависимом запоминающем устройстве обусловлена
требованием работоспособности устройства сразу после подачи
питающих напряжений.
Оперативное запоминающее устройство (ОЗУ)
используется для записи, чтения и хранения промежуточных
результатов вычислений. Микросхемы оперативного ЗУ не
сохраняют информацию при выключении питания. Поэтому при
включении питающего напряжения в ОЗУ содержится случайная
информация.
Шина данных
Строб
состояния
Адресная шина ША
Подтверждение
прерывания
Запрос
ПДП
Запрос
ожидания
Чтение
Запись
Ввод
Вывод
Запрос
прерывания
ША0-ША15
ЗХ
РПР
ЗПР
КР58ИК80
ШД0-ШД7
ЗП
ГТ ЧТ
СБР ПЗХ
Ф1 С Ф2
Сброс
Ф1 Ф2
КР580ГФ24
Тактовый
генератор
КР580ВК38
Системный
контроллер
ПЗУ
Порты
ввода-
вывода
ОЗУ
Рисунок 3.3 − Структурная схема МП системы на основе
КР580ИК80
28

Для обращения к ячейкам ПЗУ и ОЗУ МП использует адрес.
Совокупность всех адресов составляет адресное пространство
памяти. Максимальный суммарный объем ПЗУ и ОЗУ в системе на
базе КР580 составляет 64 Кбайта (65536 байтов). Часть адресов
этого адресного пространства могут быть свободны. Это означает,
что при записи информации в свободные адреса запоминания
данных не произойдет, а при чтении будет считана случайная
информация.
Порты ввода-вывода предназначены для обеспечения связи
МП-системы с внешними устройствами, например, клавиатурой,
дисплеем, накопителем на магнитной ленте и т.д. Их адреса
составляют адресное пространство устройств ввода/вывода.
Порты ввода и порты вывода адресуются раздельно и независимо.
Максимальное количество устройств ввода и вывода в системе – по
256.
Системный контроллер КР580ВК38 запоминает по стробу
состояния управляющее слово состояния. Используя информацию
управляющего слова и сигналов ЧТ и ЗП, системный контроллер
формирует сигналы чтения памяти ЧТЗУ, записи памяти ЗПЗУ,
чтение устройства ввода ЧТВУ и запись в устройства вывода
ЗПВУ. Шина данных коммутируется в системном контроллере в
зависимости от направления передачи информации. По сигналу
ПЗХ контроллер переводит шину данных в отключенное состояние.
Это режим прямого доступа к памяти (ПДП). В этом режиме адреса
и данные на шинах ША и ШД и сигналы управления на шине
управления ШУ формирует внешнее устройство, выполняющее
режим ПДП.
Тактовый генератор КР580ГФ24, используя кварцевый
резонатор, формирует две последовательности синхроимпульсов
Ф1 и Ф2. Кроме этого на генератор заводятся сигналы сброса и
ожидания медленных устройств. Генератор привязывает
асинхронные сигналы к тактовым последовательностям и выдает
сигналы СБР и ГТ на микропроцессор. Используя сигнал C,
тактовый генератор формирует сигнал «строб состояния»,
используемый для записи управляющего слова состояния.
3.2 Форматы команд и методы адресации
29
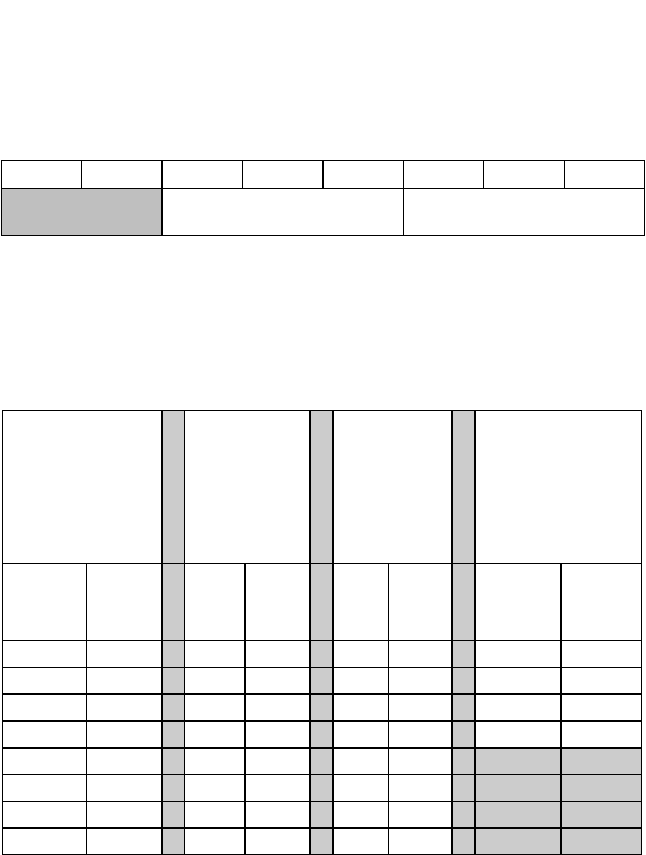
В системе команд МП имеются одно-, двух- и трехбайтовые
команды. Первый байт всех команд содержит обязательный код
операции (КОП) (закрашенное поле на изображениях байтов) и
одно или два адресные поля, присутствующих в большинстве
команд. Общий формат байта кода операции имеет следующий вид:
D7
D5
D0
D1
D2
D3
D4
D6
КОД КОМАНДЫ
(КОП)
АДРЕС
РЕГИСТРА - ПРИЕМНИКА
АДРЕС
РЕГИСТРА - ИСТОЧНИКА
Назначение полей меняется в зависимости от синтаксиса
текущей команды (таблица 3.3). Код адресного поля подставляется
в соответствующие разряды кода команды. Приведем возможные
форматы одно-, двух- и трехбайтовых команд.
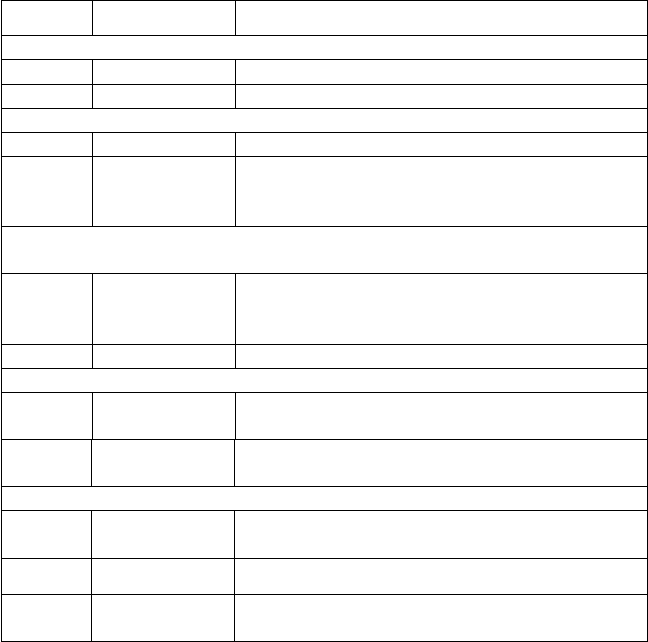
Таблица 3.3 − Значения адресных полей
Поля
регистров
приемника и
источника
DDD, SSS
Поле
условия
передачи
управлени
я
CCC
Поле
адреса
вектора
прерыван
ия
NNN
Поле указателя
пары регистров
RP
Регист
р
Код
(BIN)
Усл
о-
вие
Код
(BI
N)
Век
-
тор
Код
(BI
N)
RG_16
Код
(BIN)
B 000 NZ 000 0 000 BC 00
C 001 Z 001 1 001 DE 01
D 010 NC 010 2 010 HL 10
E 011 C 011 3 011 SP 11
H 100 PO 100 4 100
L 101 PE 101 5 101
M 110 P 110 6 110
A 111 M 111 7 111
30