Степанов А.Г. Динамические процессы шахтной подъемной установки с двигателем постоянного тока
Подождите немного. Документ загружается.

УДК 622. 673. 1: 621. 313. 2
А.Г. Степанов, д-р техн. наук, проф., Засл. деятель науки РФ, Бостон, США
E-mail: agstepanov @ mail . ru
Динамические процессы шахтной подъемной установки с двигателем
постоянного тока
Выполнено математическое моделирование динамических процессов при пуске
двигателя постоянного тока шахтной подъемной установки. Предложена
система автоматического регулирования, демпфирующая колебания сосудов.
Реализация подобных систем позволит повысить безопасность эксплуатации
и устранить возможное скольжение канатов по барабану трения шахтных
многоканатных подъемных машин.
Ключевые слова: шахтный подъем, динамика, электродвигатель, колебания,
сопротивление, характеристика, скорость, ускорение, замедление, скип, момент.
----------------------------
A.G. Stepanov
Dynamic of the Processes of the Mine Hoisting Systems with the Direct Current Engine
This article proposes a mathematical modeling of the dynamic process at the start-up of the
mine hoisting system with direct current engine. The automatic-control system dampers the
oscillation of the loads. Realization of similar systems will increase safety of operation and
eliminate possible sliding of ropes on a drum of a friction of the mine multirope hoisting
systems.
Keywords: mine hoist, dynamics, the electric motor, vibration, resistance, characteristic, speed,
acceleration, deceleration, skip, the moment.
Большое количество жестких механических характеристик
электродвигателя постоянного тока с независимым возбуждением а также
приводов переменного тока с непрерывным управлением (частотные с
синхронным или асинхронным двигателями, каскады, двигатели двойного
питания) позволяют на новом уровне решить задачу кинематики и динамики
шахтных подъёмных машин. С целью уменьшения динамических нагрузок и
увеличения долговечности эксплуатации подъёмных установок проф. В.С.
Тулин предложил применять тахограммы со сглаженными переходами
скорости, без скачкообразных изменений ускорений [1]. Суть этого
предложения заключалась в необходимости ограничения скорость изменения
ускорения, т.е. в ограничении рывка. Следует заметить, что величина рывка
не только формирует динамические нагрузки в элементах подъёмной
системы, но и оказывает влияние на ощущения человека в клети. Влияние
этого физиологического фактора зависит не от величины скорости, и не
столько от величины ускорения, сколько, и главным образом, от темпа
изменения ускорения, т.е. от рывка [2]. Проф. В.М. Чермалых
сформулировал условие, которое заключалось в том, что оптимальная
тахограмма движения груза, при котором отсутствуют колебания получается
1

при трапецеидальном законе изменения ускорения системы с периодами
нарастания и уменьшения ускорения, равными периоду собственных
колебаний ветви каната с груженым сосудом, расположенным в крайнем
нижнем положении [3]. Справедливость этого положения подтверждена при
изучении динамических процессов при торможении шахтных подъемных
установок [4, с. 204],[5, с. 83]. Рассмотрим поставленную задачу на примере
подъемной установки с приводом постоянного тока.
Механические характеристики электродвигателя постоянного тока с
независимым возбуждением подчиняются уравнению [2].
ФС
RIU
n
е
яя
(1)
где
U
- напряжение на зажимах двигателя,
в
;
я
I
- ток в цепи якоря,
а
;
я
R
- сопротивление якорной цепи,
ом
; Ф - магнитный поток двигателя,
вб
;
е
С
- коэффициент, зависящий от конструктивных параметров электро-
двигателя, в частности, от числа пар главных полюсов и числа пар па-
раллельных ветвей обмотки якоря,
вб
св
.
Произведение коэффициента
е
С
и магнитного потока
Ф
в практических
исследованиях удобно определять по номинальным данным из технических
характеристик
н
янн
n
RIU
е
ФС
. Сопротивление якорной цепи
я
R
, состоит из
сопротивления обмотки якоря, переходного сопротивления щеток,
сопротивления последовательной обмотки возбуждения (если последняя
имеется), сопротивления компенсационной обмотки и сопротивление об-
мотки дополнительных полюсов. Из-за отсутствия в каталогах этих данных,
сопротивление якорной цепи определяется приближенно [6]
н
н
ня
I
U
R )1(5,0
,
где
н
- КПД двигателя при работе в номинальном режиме.
Индекс н, предписанный I и U, характеризует эти величины при работе
электродвигателя в номинальном режиме.
Известно, что электромагнитный момент пропорционален току
якорной цепи
ям
IФCM
или
ФС
M
я
м
I
. Коэффициент
ФС
м
определяется по
номинальным параметрам
н
н
I
М
м
ФС
,
а
мН
.
Подставив эти значения в (1), получим уравнение механической
характеристики
Мn
ФСФС
R
ФС
U
ме
я
е
Если обозначить
н
М
М
x
то уравнение относительного момента
x
можно
записать
)(
60
1
xU
D
ФC
IR
x
е
ня
, (2)
где
U
- напряжение, подводимое к электродвигателю,
в
;
D
- диаметр
машины,
м
;
x
- линейная скорость машины,
с
м
.
2
Исследуем динамические процессы на примере шахтной подъемной
установки, имеющей техническую характеристику:
Подъемная машина 2Ц5х2,8;
Масса вращающихся частей машины, m
м
196540 кг;
Масса груженого сосуда, m
cy
42000 кг;
Масса порожнего сосуда, m
cz
17000 кг;
Масса полезного груза, m
n
= m
cy
- m
cz
25000 кг;
Высота подъема, H
n
440,8 м;
Линейная плотность каната, p 17,148 кгм
-1
;
Площадь проволок в канате, F
k
18,810
-4
м
2
;
Модуль упругости каната, E 1210
10
Па;
Логарифмический декремент колебаний, 0,15;
Статическое сопротивление движению системы, F
ст
(0) 356000 Н ;
Коэффициент, характеризующий вредные сопротивления, k 1,15;
Мощность электродвигателя, N
н
3200 кВт;
Частота вращения электродвигателя, n
н
40,8 обмин
-1
;
Номинальное напряжение двигателя, U
н
600 В;
Номинальный ток двигателя, I
н
5850 А;
Номинальное усилие, F
н
390000 Н;
Для шахтных подъёмных установок, в соответствие с требованиями
ОНТП-5-86 [7], ускорение в период основного разгона не должно превышать
1,0
2
с
м
, при этом в начальный момент трогания ускорение должно быть менее
0,3
2
с
м
. Исходя из условия получения минимальных динамических нагрузок
при пуске, эти уровни ускорений должны формироваться за время кратное
периоду колебаний груженой ветви каната. При этом, колебательный процесс
в порожней ветви каната не будет минимизирован. Так как уровень нагрузок
в порожней ветви примерно в два раза меньше чем в груженой, вопрос о
получении минимальных нагрузок в порожней ветви на данном этапе не
ставится. Следовательно, ускорение 0,3
2
с
м
должно быть достигнуто за время,
равное периоду колебаний, оставаясь равным этой величине до тех пор, пока
не будет пройден путь, равный длине разгрузочных кривых. После этого
ускорение от величины 0,3
2
с
м
должно возрасти до заданного верхнего
предела за время, равное периоду свободных колебаний. При приближении
скорости машины к максимальной ускорение должно уменьшиться до нуля,
за период свободных колебаний. При высоких скоростях движения путь
разгона может достигать большой величины. В результате периоды
колебаний в начале и в конце процесса разгона могут отличаться. Этот факт
необходимо учитывать при формировании программы движущего усилия и
при численном интегрировании динамического процесса.
Из уравнения (2) видно, что для реализации рассмотренного
движущего усилия необходимо сформировать соответствующий закон
изменения напряжения U, подводимого к электродвигателю. Из-за наличия
индуктивности обмоток, привод постоянного тока имеет электромагнитную
постоянную времени. Влияние постоянной времени необходимо учесть при
формировании задания. Электромагнитная постоянная времени
электродвигателя определяется в основном индуктивностью и активным
3
сопротивлением обмотки возбуждения. Для привода шахтного подъема, в
рабочем цикле, магнитный поток обмотки возбуждения двигателя -
постоянная величина. Следовательно, электромагнитная постоянная времени
привода постоянного тока будет определяться в основном постоянной
времени источника напряжения [2]. Если в качестве регулируемого
источника напряжения применяется генератор постоянного тока, то
электромагнитная постоянная времени определится параметрами обмотки
возбуждения генератора
в
R
в
L
э
, здесь
в
L
- индуктивность обмотки
возбуждения,
Г
;
в
R
- активное сопротивление обмотки возбуждения,
ом
.
Величина электромагнитной постоянной времени для мощных машин
может достигать 3 с [2]. Если в качестве регулируемого источника
напряжения используются тиристорные преобразователи, то постоянная
времени значительно уменьшается.
Электромагнитная постоянная времени обмотки якоря во много раз
меньше постоянной времени обмотки возбуждения и, как правило, первой
можно пренебречь. Для уменьшения электромагнитной постоянной времени
обмотки возбуждения в ее цепь включается дополнительное активное
сопротивление.
Если на обмотку возбуждения, имеющей индуктивность
в
L
и
омическое сопротивление
в
R
, подано напряжение
)(tU
в
, то изменение тока
в такой цепи характеризуется известным уравнением [2].
itUi
эвэ
в
R
11
)(
,
Между током
i
и напряжением генератора
U
существует прямая
пропорциональность, поэтому
ikU
у
,
у
k
- коэффициент усиления,
а
в
.
Из уравнения (2) усилие, развиваемое электродвигателем
,
60
1
)(
н
e
y
ня
дв
Fx
D
ФC
ik
IR
xF
где
Dn
N
н
н
н
gF
9752
- номинальное усилие двигателя,
Н
.
Динамические процессы шахтной подъёмной установки,
представленной трех массовой механической системой с вязкоупругими
связями характеризуется системой уравнений [4, с. 270],[5, с. 94]:
)()()(
);()()(
);()()()()()()(
.
zsignPxzcxzzm
ysignPxycxyym
xFtFxFzxcyxczxyxxm
zzzz
yyyy
двmcmzyzyx
Здесь
zyx ,,
- соответственно координаты перемещений органа навивки,
груженого и порожнего сосудов;
zyx
mmm ,,
- соответственно массы вращающихся частей машины, груженого
и порожнего сосудов, с учетом массы канатов, вычисленных, используя
принцип Релея [4, с. 21],[5, 32 с.];
)2()( xpHpmkgxF
ппcm
- функция, характеризующая изменение
статических сопротивлений в зависимости от координаты перемещения
машины
x
;
)(tF
m
- функция, характеризующая изменение тормозного усилия в
зависимости от значения текущего времени
t
;
4
zyzy
cc
,,,
- коэффициенты, характеризующие жесткость и диссипативные
свойства ветвей канатов [4, с. 186];
zy
PP ,
- силы вредного сопротивления для груженой и порожней ветвей,
Н
;
sign
функция Кронеккера, которая показывает, что при изменении
знака скорости изменяется направление силы сопротивления.
Таким образом, для изучения динамических процессов шахтной
подъёмной установки с приводом постоянного тока с независимым
возбуждением необходимо решить систему дифференциальных уравнений
)(
3
1
3
1
1
;
3
1
3
1
1
;
601
)()(
3
1
3
11
)(
11
zsignP
zl
FE
zxzlpm
zl
FE
zx
zlpm
z
ysignP
yl
FE
yxylpm
yl
FE
yx
ylpm
y
Fx
D
ФC
ik
IR
tFxF
zl
FE
xz
yl
FE
xy
zlpm
zl
FE
xzylpm
yl
FE
xy
m
x
itUi
z
z
k
zcz
z
k
zcz
y
y
k
ycy
y
k
ycy
н
e
y
н
я
тст
z
k
y
k
zcz
z
k
ycy
y
k
x
э
в
в
R
э
(3)
В этой системе первое уравнение характеризует изменение тока в
обмотке возбуждения при подаче на ее зажимы напряжения
)(tU
в
. Второе
уравнение характеризует ускорение машины с учетом изменения статических
сопротивлений
)(xF
cm
, тормозного усилия
)(tF
m
, движущего усилия в
зависимости от тока
i
и скорости машины
x
, которое определяется
последним членом функции
x
. Жесткости
y
с
,
z
c
, и коэффициенты
диссипации
y
,
z
, (коэффициенты при
)(),(),(),( xzxyxzxy
)
изменяются в процессе и зависят от перемещений
y
груженого и
z
порожнего сосудов.
y
l
и
z
l
- длины канатов груженой и порожней ветвей в
начале процесса пуска. Третье и четвертое уравнения характеризуют
изменение ускорений
y
и
z
, при этом учитываются изменения концевых
масс, жесткостей и коэффициентов диссипации.
Период свободных колебаний груженого сосуда определится по формуле
)(
2
yxy
yx
mmc
mm
y
T
[4, с. 283].
В начале процесса разгона
мl
y
509
,
cT
y
808,1
. Чтобы определить
требования к закону формирования движущего усилия, обеспечивающего
минимальные динамические нагрузки, рассчитаем кинематические
параметры установки в период разгона.
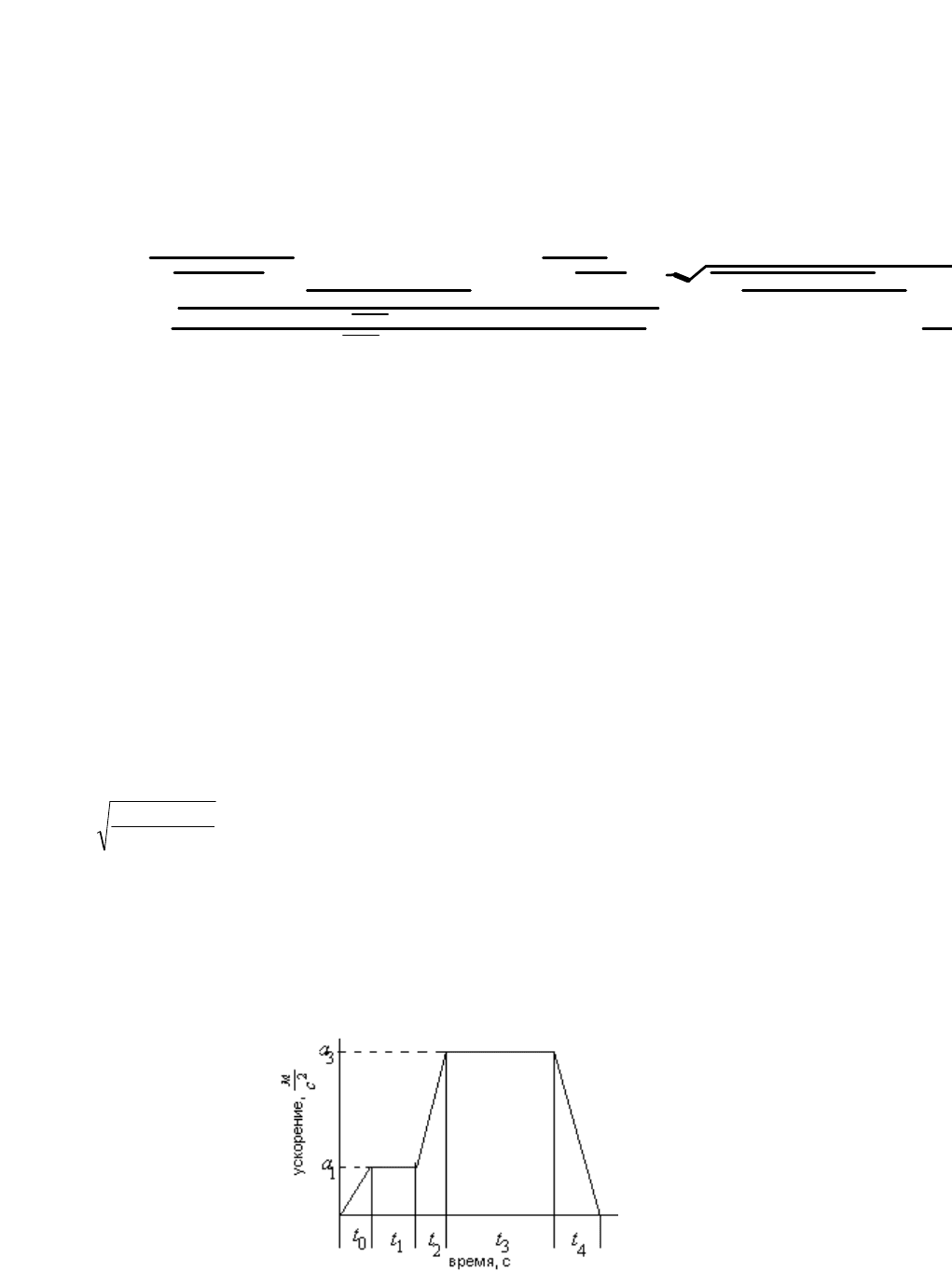
Ускорение машины должно изменяться по характеристикам,
показанным на рис. 1. Периоды времени
0
t
,
2
t
и
4
t
должны быть равными
Рис. 1. Характеристики изменения ускорения.
5

периодам свободных колебаний груженого сосуда, соответственно в эти
моменты времени. Так как перемещение груза на участках
0
t
и
1
t
равно
пути в разгрузочных кривых
мh 17,2
0
, частоты колебаний практически не
изменяются. Примем
y
Ttt
20
. Ускорение в начале процесса разгона
возрастает до величины
2
3,0
0
с
м
a
за время
cT
y
808,1
. Текущее значение
кинематических параметров на этом отрезке времени
;
0
tx
;
2
0
2
t
x
6
0
3
t
x
.
Здесь
3
1
166,0
808,1
3,0
0
с
м
T
a
y
- рывок. При t = T
y
ускорение, скорость и
перемещение приобретают соответственно
2
3,0
1
с
м
a
,
с
м
v 271,0
0
,
мx 327,0
0
. Достигнув ускорения
1
a
, машина движется равноускоренно до
момента, пока подъемный сосуд не выйдет из разгрузочных кривых, т. е.
0
hy
. Для укрупненного расчета, на данном этапе примем
yx
.
Следовательно, кинематические параметры периода t
1
следующие:
;
1
ax
;
10
tavx
2
1
2
1
00
tatvxx
.
Здесь текущее значение времени
t
изменяется от нуля, т. е. истинное время,
для данного периода, больше на T
y
. Такой подход дает возможность записать
ниже приведенные выражения менее громоздко. В конце периода
1
t
:
;
11
ax
;1101
tavx
2
11
2
1
10001
tatvxhx
.
Этот период равноускоренного движения должен продолжаться до момента,
пока масса
y
m
не пройдет путь
0
hy
. Из последнего уравнения
ct
yy
T
xha
T
7,2
2)(
2
2
2
1
001
.
Следовательно, скорость выхода из разгрузочных кривых
с
м
tavv 08,1
1101
, т. е. меньше допустимой
с
м
5,1
. На отрезке времени
2
t
кинематические
параметры имеют характеристики:
y
T
aa
13
2
;
tax
21
;
2
211
2
t
tavx
;
6
2
2
111
32
tt
atvxx
.
Подставив время
y
Ttt
2
, получим значение кинематических параметров в
конце периода t
2
:
3
2
36,0
с
м
;
2
3
95,0
с
м
a
;
с
м
v 8,2
2
;
мx 613,4
2
.
В период t
3
машина движется равноускоренно с ускорением
2
3
95,0
с
м
a
.
Следовательно
3
ax
;
tavx
32
;
2
322
2
t
atvxx
.
Разгон машины с ускорением
3
a
должен осуществляться до скорости
3
v
,
которая выбирается такой величины, чтобы машина достигла максимальной
скорости за время
y
Tt
4
при условии, что за это время ускорение снизится
до нуля. Для определения периода колебаний на этом отрезке времени с
учетом изменения длины каната груженой ветви и эквивалентных масс
y
m
и
z
m
можно принять
;68,10
3
с
м
max
Vv
ct
a
vV
max
47,8
3
2
3
;
6
мatvxx
t
406,62
2
33223
3
2
, тогда период колебаний груженого сосуда на
этом участке будет
cT
px
y
xp
x
x
y
l
FE
xp
x
xp
y
mm
mm
y
723,12
)(
)()(
33
33
, а кинематические
параметры определяться:
ct 723,1
4
;
4
3
4
t
a
;
tax
43
;
2
433
2
t
tavx
;
6
4
2
333
32
tt
atvxx
.
Таким образом, программа задания кинематических параметров на период
разгона в математическом пакете MathCad запишется:
otherwise
ttttttttttiftttttt
ttttttttifa
ttttttifattt
ttttifa
ttift
ta
0
)(
:)(
543214321543213
43213211
321210212
2100
01
Полученные значения ускорений позволяют сформировать требования
к движущему усилию привода:
)()()( tamxFtF
стдв
,
Для рассматриваемого примера статическое сопротивление в начале подъема
НF
ст
356000)0(
, приведенная к органу навивки масса всех движущихся
частей установки
кгllpmmmm
zyczcyx
273000)(
.
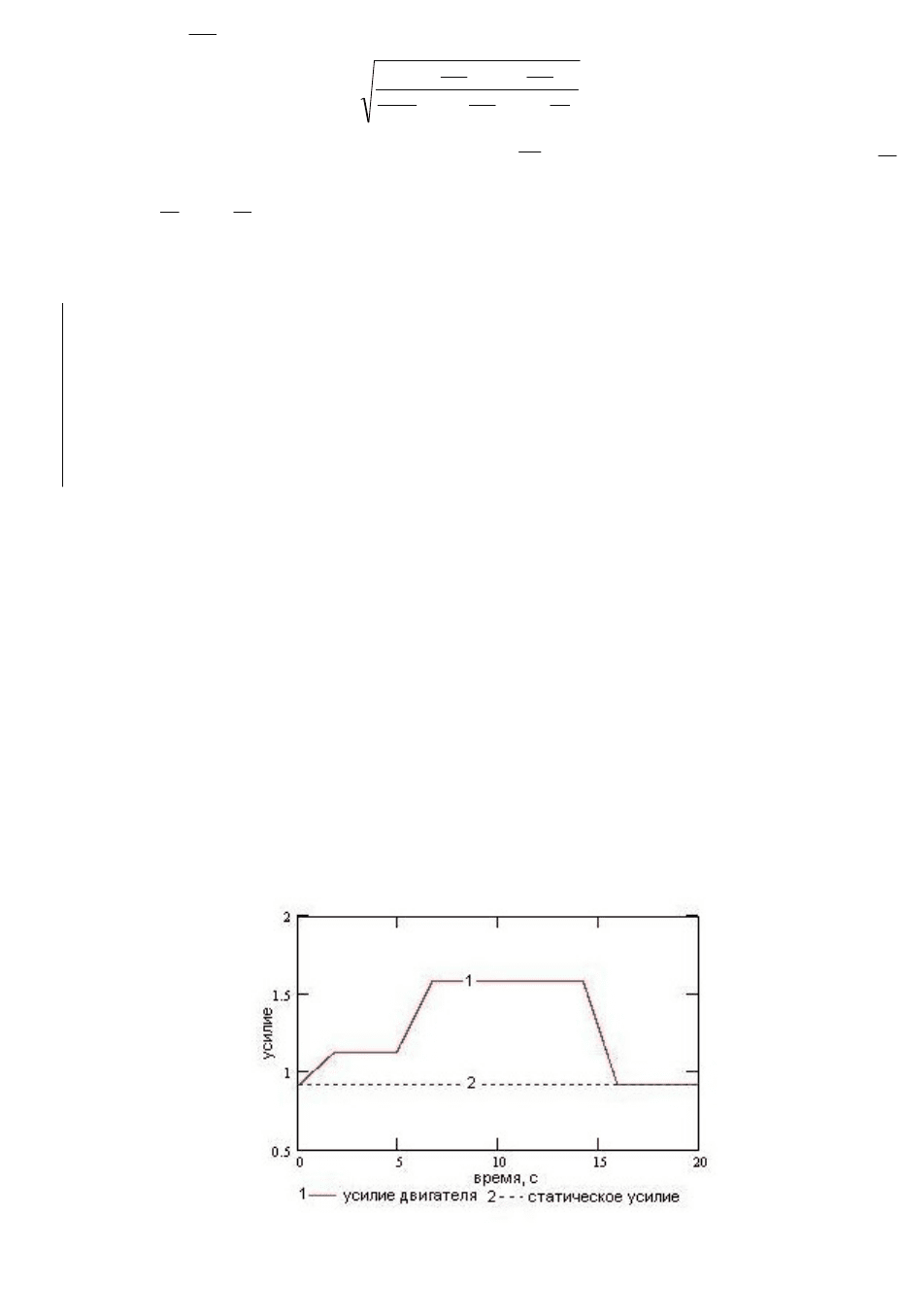
На рис. 2 показан закон формирования движущего усилия,
построенный по выше приведенным зависимостям, при допущении, что
система автоматического регулирования приводом постоянного тока
безынерционная а тормозное усилие уменьшается до нуля мгновенно. Этот
закон изменения движущего усилия должен обеспечить минимальные
динамические нагрузки при разгоне. На рисунке усилия показаны в
относительных единицах. За базовую величину принято номинальное усилие
Рис. 2. Закон формирования движущего усилия.
электродвигателя
НF
н
487500
.
Исследование динамических процессов шахтной подъемной установки
проведено путем численного интегрирования системы уравнений (3) в
математическом пакете MathCad, с использованием стандартной программы
7
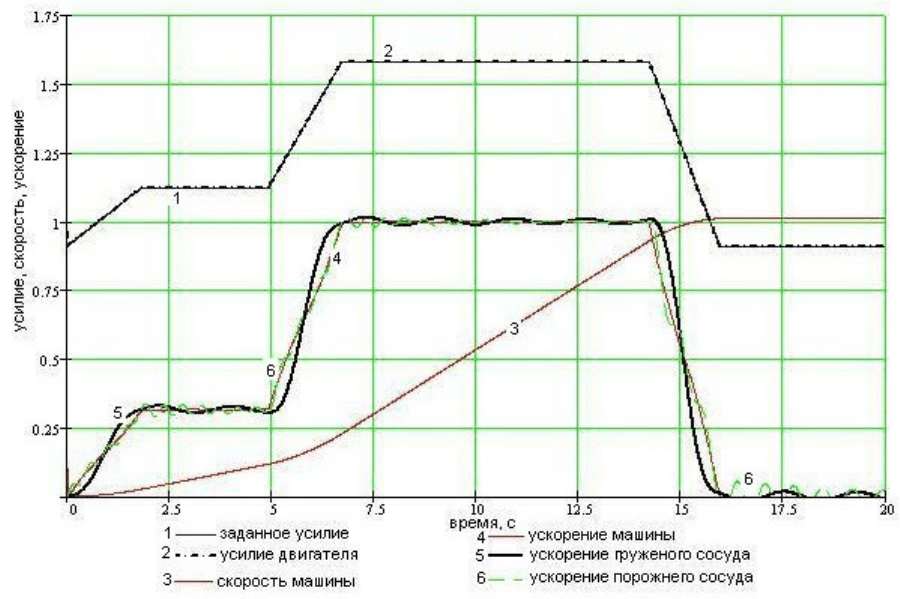
rkfixed (Рунге-Кутта). Полученная закономерность изменения движущего
усилия создаст изменение ускорения и скорости машины, представленных на
рис. 3. Скорость машины приведена в относительных величинах. За базовую
величину принята максимальная скорость. Результаты математического
моделирования показывают, что заданный закон приложения движущего
Рис. 3. Кинематические параметры разгона подъемной установки.
усилия обеспечивает разгон подъёмной установки, практически без
колебаний. Ускорения машины и порожнего сосуда почти совпадают.
8

Для сравнения на рис. 4 показан процесс разгона при ступенчатом
задании усилия двигателя. Из рисунка видно, что ступенчатое приложение
Рис. 4. Процесс разгона при ступенчатом изменении движущего усилия
двигательного усилия вызывает в электромеханической системе колебания
элементов подъёмной системы. Ускорения сосудов колеблются вокруг
ускорения машины, при этом их мгновенные значения превышают почти в 2
раза ускорение машины. Колебательный процесс формируется не только при
приложении ступенью усилия двигателя, но и при ступенчатом уменьшении
его до статического. На рис. 5а приведены характеристики динамических
составляющих усилий груженой и порожней ветвей канатов при
программном задании усилия двигателя. Для сравнения, на рис. 5б, показаны
эти же характеристики при ступенчатом изменении усилия двигателя. Видно,
что динамическая составляющая груженой ветви на рис. 5б превышает почти
в два раза эту же величину на рис. 5а. Высокочастотные колебания
порожней ветви каната быстро затухают, не вызывая дополнительных
напряжений в канатах. Рассмотренные динамические процессы
9

Рис. 5. Динамические составляющие усилий груженой и порожней ветвей
канатов
промоделированы при допущении, что электромагнитная постоянная
времени двигателя равна нулю и в момент включения электродвигателя
усилие тормоза падает мгновенно. Если учесть, что электромагнитная
постоянная времени электродвигателя
c
э
1
, то усилие электродвигателя
будет формироваться с запаздыванием. Характеристика уменьшения
тормозного усилия подчиняется закономерности.
othewisetFtifeFFtF
m
t
maxmaxm
xx
xx
t
t
0)(;)1()(
2
2
2
здесь
)0(3
cmmax
FF
- максимальное тормозное усилие;
ct
xx
3,0
- время
холостого хода тормоза [8];
c23,1
- постоянная времени тормоза [4, с. 65];
Эта формула записана в обозначениях математического пакета MathCad, из
которой видно, что при текущем значении времени
2
xx
t
t
тормозное усилие
0)( tF
m
. Представленная зависимость достаточно точно характеризует
процесс, протекающий в реальной тормозной системе, и используется при
исследовании динамических процессов при торможении шахтных
подъемных установок [4, с. 294],[5, с. 95]. Характеристики переходного
процесса, при этих условиях, показаны на рис. 6. Видно, что усилие
10