Соловьев А.С., Алексеев В.В. Электропривод с векторным управлением. Руководство к проектированию
Подождите немного. Документ загружается.

11
3.4. Электромеханическая
связь в электроприводе
Выражение
jj,i
q2
1j
iii
iL
dt
d
iRU ⋅Σ+=
α=
, можно представить в форме, соответст-
вующей дифференцированию произведения. Кроме того, учтем, что φ=ωt, где ω – угло-
вая скорость ротора, откуда dt=dφ/ω. Поэтому нетрудно перейти к форме записи
∑
α=
α=
ϕ
ω+⋅Σ+=
q2
1j
j
j,ij
j,i
q2
1j
iii
i
d
dL
dt
di
LiRU,
Первый член последнего выражения представляет собою падение напряжения
на активном сопротивлении данной обмотки, второй - результирующую ЭДС самоин-
дукции и взаимной индукции, вызванную изменением токов в обмотках. Третий член
представляет ЭДС, наведенную в обмотке в результате механического движения ротора
машины, т.е. отражает взаимодействие механической и электрической
части электро-
привода.
3.5. Линейные преобразования уравнений обобщенной
электрической машины
Представление обобщенной машины в виде двухфазной позволяет уменьшить
число уравнений, описывающих ее динамику. Однако, при использовании трехфазных
машин возникает необходимость приведения их к двухфазным. Это преобразование
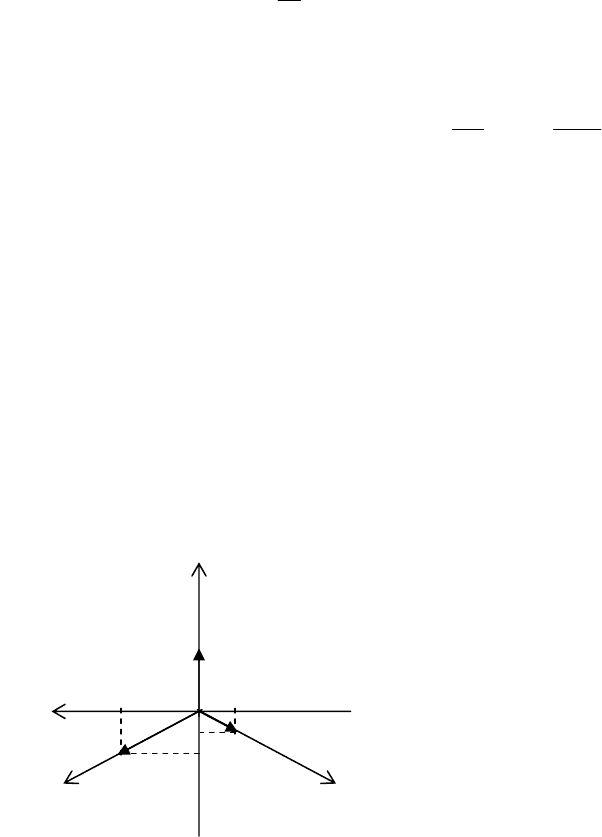
может быть выполнено на основании векторной диаграммы рис.2.
Согласно диаграмме преобра-
зование трехфазной системы векторов
в двухфазную можно выполнить, ис-
пользуя следующие соотношения:
x
α
=x
a
-(x
b
+x
c
)/2;
x
β
=√3¯ (x
b
-x
c
)/2.
Учитывая, что в электрических машинах
обычно
x
a
+x
b
+x
c
=0 или x
b
+x
c
=-x
a
, по-
лучим x
α
=3x
a
/2;
Соответственно обратное пре-
образование выполняется по форму-
лам
x
a
= x
α
;
x
b
=(√3¯ x
β
- x
α
)/2;
x
c
=-(√3¯ x
β
+ x
α
)/2.
Рис. 2
Реализация преобразований выполняется специальными преобразователями фаз,
которые могут быть выполнены на обычных аналоговых суммирующих усилителях.
После перехода к двухфазной системе появляется возможность выбора коорди-
натных осей таким образом, чтобы упростить эти уравнения.
Рассмотрим изменение координат при повороте осей. Если ранее вектор X опре-
делялся проекциями на оси α и β, то проекции
этого же вектора на оси u и v, поверну-
тые на произвольный угол γ относительно осей α и β определяются выражениями
x
u
=x
α
cos γ+x
β
sinγ;
x
v
= - x
α
sinγ+x
β
cosγ;
Применим это преобразование к исходной системе уравнений равновесия стато-
ра и ротора, написанных в координатах α, β для статора и d, q для ротора. Положим при
этом, что новая система координат вращается со скоростью ω
К
, т.е. γ= ω
К
t. Тогда в по-
лученные выражения будут входить проекции вектора тока статора i
1
и потокосцепле-
x
c
x
b
x
a
c
b
β
a, α
12
ния Ψ
1
на оси α, β, а также проекции вектора тока ротора i
2
и потокосцепления Ψ
2
на
оси d, q. Учтем, что обратное преобразование координат может быть выполнено с ис-
пользованием формул
x
1α
=x
1u
cosω
К
t – x
1v
sinω
К
t;
x
1β
=x
1u
sinω
К
t + x
1v
cosω
К
t;
x
2d
=x
2u
cos(ω
К
t-ω
эл
) – x
2v
sin(ω
К
t-ω
эл
);
x
2q
=x
2u
sin(ω
К
t-ω
эл
) + x
2v
cos(ω
К
t-ω
эл
).
Подставив эти уравнения в полученную систему, после преобразований полу-
чим уравнения равновесия в виде
v1K
u1
u11u1
dt
d
iRU Ψω−
Ψ
+=
;
u1K
v1
v11v1
dt
d
iRU Ψω+
Ψ
+= ;
v2ЭЛK
u2
u22u2
)(
dt
d
iRU Ψω−ω−
Ψ
+= ;
u2ЭЛK
v2
v22v2
)(
dt
d
iRU Ψω−ω−
Ψ
+= .
Так же, как это было показано ранее первый член каждого выражения представ-
ляет собою падение напряжения на активном сопротивлении данной обмотки, второй -
результирующую ЭДС самоиндукции и взаимной индукции, вызванную изменением
токов в обмотках. Третий член представляет ЭДС, наведенную в обмотках неподвиж-
ного статора движущимся полем машины, а также то, что
скорость ротора в общем
случае не равна нулю.
Выбор скорости вращения новой системы координат имеет существенное зна-
чение для упрощения вида уравнений. Применим преобразование осей координат для
цепи статора двухфазной машины. Пусть к обмоткам машины приложена симметрич-
ная двухфазная система напряжений
U
1α
=U
1 max
cos ω
0
t; U
1β
=U
1 max
sin ω
0
t.
Положим, γ= ω
0
t, т.е. изобразим эту систему напряжения в осях u,v, вращаю-
щихся со скоростью поля ω
0
. При использовании приведенных ранее выражений, полу-
чим
U
1u
= U
1 max
; U
1v
= 0.
Таким образом, в синхронно вращающихся осях реальные переменные напря-
жения, приложенные к обмоткам статора, преобразуются в постоянное напряжение
U
1max
=const, приложенное к обмотке расположенной по оси U. Этот результат имеет
физический смысл: вращающееся магнитное поле, создаваемое при неподвижных об-
мотках статора системой двухфазных токов, при переходе к обмоткам, вращающимся
со скоростью поля, может быть создано постоянным напряжением U
1 max
.
Аналогично уравнения для потокосцеплений в осях u и v примут вид:

13
Ψ
1 U
=L
1
i
1 U
+ L
12
i
2 U
;
Ψ
1 V
=L
1
i
1 V
+ L
12
i
2 V
;
Ψ
2 U
=L
2
i
2 U
+ L
12
i
1 U
;
Ψ
2 V
=L
2
i
2 V
+ L
12
i
1 V
;
Последние соотношения также можно получить исходя из физических сообра-
жений. В осях u и v, вращающихся со скоростью ω
0,
обмотки машины неподвижны от-
носительно друг друга. Поэтому потокосцепление каждой обмотки определяется ее
собственной индуктивностью и взаимной индуктивностью обмотки расположенной на
той же оси. Взаимодействие с токами других обмоток отсутствует, так как их оси сдви-
нуты на 90˚.
Во многих случаях при исследовании динамики машин переменного тока воз-
можность замены синусоидальных
напряжений постоянными, достигаемая преобразо-
ванием к соответствующим осям координат, существенно упрощает моделирование и
анализ результатов. Такое же преобразование, позволяющее перейти к постоянным на-
пряжениям, при его аппаратной реализации, дает возможность существенно упростить
систему управления электроприводом переменного тока, позволяя использовать те же
системы и способы управления, которые применяются для электроприводов постоян-
ного тока. Эти системы получили название систем векторного управления.
3.6. Электромагнитный момент обобщенной электрической машины
Как известно, электромагнитная сила и электромагнитный момент являются
векторными произведениями тока на потокосцепление. Векторное произведение векто-
ров Ī и Ū может быть представлено в виде Im(Ī·Ū*)=|Ī|·|Ū| sin(ŪˆĪ), где угол между век-
торами отсчитывается от второго вектора к первому (Ū→Ī). В последних выражениях
Im – операция взятия мнимой части
комплексного числа; звездочкой обозначена опера-
ция комплексного сопряжения.
Это соотношение может быть представлено в виде·|Ū| I
2
, где I
2
=|Ī| sin(ŪˆĪ), - про-
екция вектора на ось системы координат, связанной с вектором Ū.
Отсюда электромагнитный момент машины
M=0,5m p L
12
Im(Ī
s
· Ī
r
*)=0,5m p Im(Ī
s
·Ψ
0
*).
Уравнение для электромагнитного момента также можно представить в виде
,I
L
L
p
2
m
Ip
2
m
IIpL
2
m
M
3
2s
r
2
12
2
2s
0
1
2sr12
⋅Ψ=⋅Ψ=⋅=
•••
где Ī
s
- вектор тока статора; Ī
r
- вектор тока ротора; Ψ
0
–
вектор главного потокосцеп-
ления; Ψ
r
– вектор потокосцепления ротора;
i
2s
I
- проекция вектора тока статора на
оси координат с опорными векторами Ī
r
, Ψ
0
, Ψ
r
.
Как видно из уравнений существует возможность управления электромагнит-
ным моментом за счет величин переменных и взаимного положение векторов. Для ре-
шения последней задачи необходимо реализовать способы измерения положения век-
торов.
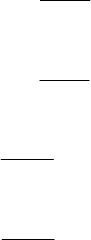
Рассмотрим векторную диаграмму обобщенной двухфазной машины, построен-
ную исходя из математического выражения момента через главное потокосцепление Ψ
0
рис.3.
Введем новую систему координат 1,2, ориентированную по главному потокос-
цеплению. Тогда составляющая тока статора, синфазная главному потокосцеплению,
может интерпретироваться как ток возбуждения машины постоянного тока, а состав-
ляющая тока статора, сдвинутая на 90°, - как ток компенсационной обмотки, состав-
ляющая тока ротора, сдвинутая на 90° относительно Ψ
0
, - как поперечная составляю-
14
щая тока якоря, и составляющая тока ротора синфазная потокосцеплению, - как раз-
магничивающая продольная реакция якоря. На рисунке видно, что главное потокосцеп-
ление Ψ
0
есть векторная сумма тока статора и тока ротора.
Следовательно, в системе
координат, связанной с векто-
ром главного потокосцепления,
проекции токов статора и ро-
тора на ось 2 равны. Проекции
векторов токов на ось 1 опре-
деляют главное потокосцепле-
ние. Видно, что составляющая
I
r2
размагничивающей.
Основными особенностя-
ми, отличающими описанное пред-
ставление машины переменного
тока от машины постоянного тока
являются:
А) отдельно эквивалентной
обмотки возбуждения и обмотки
компенсации поперечной реакции
якоря на статоре асинхронной ма-
шины нет; эти обмотки как бы со-
вмещены;
Б) ось, связанная с главным потокосцеплением (1), вращается относительно
статора; оси 1 и 2
вращаются относительно неподвижной системы координат α и β.
Ориентация вращающихся осей α и β по вектору главного потокосцепления Ψ
0
требует измерения этого потокосцепления как вектора, т.е. определения его величины и
мгновенного положения. Выполнить это можно путем измерения составляющих (про-
екций) этого вектора на неподвижные оси, установив, например, датчики Холла на ось
α и на ось β, сдвинутую на угол π/(2р) в расточке статора. Получив оценки Ψ
0α
и Ψ
0β
,
можно вычислить модуль потокосцепления и угол его поворота относительно непод-
вижных осей (точне синус и косинус этого угла). Математически эти вычисление не-
сложны и легко реализуемы, однако, следует иметь в виду, что потокосцепление не яв-
ляется точной синусоидой, а имеет высшие гармонические составляющие и другие по-
мехи. Для выделения мгновенной
фазы основной гармонической составляющей пото-
косцепления применяют блоки следящих синус-косинусных генераторов, получившие
название тригонометрических анализаторов или вектор-фильтров.
3.6. Система векторного управления с обобщенной машиной
В системах векторного управления приводами переменного тока с последова-
тельной коррекцией обычно выделяются два канала регулирования канал управления
потокосцеплением и канал управления электромагнитным моментом.
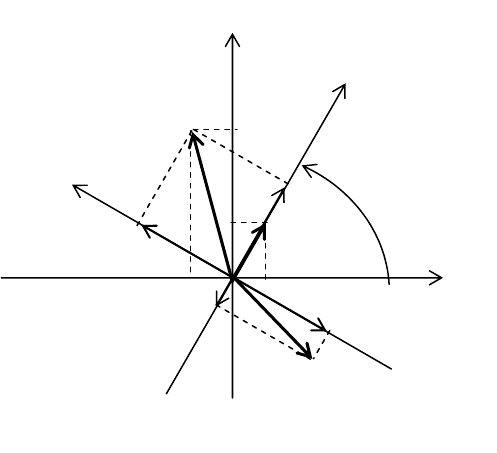
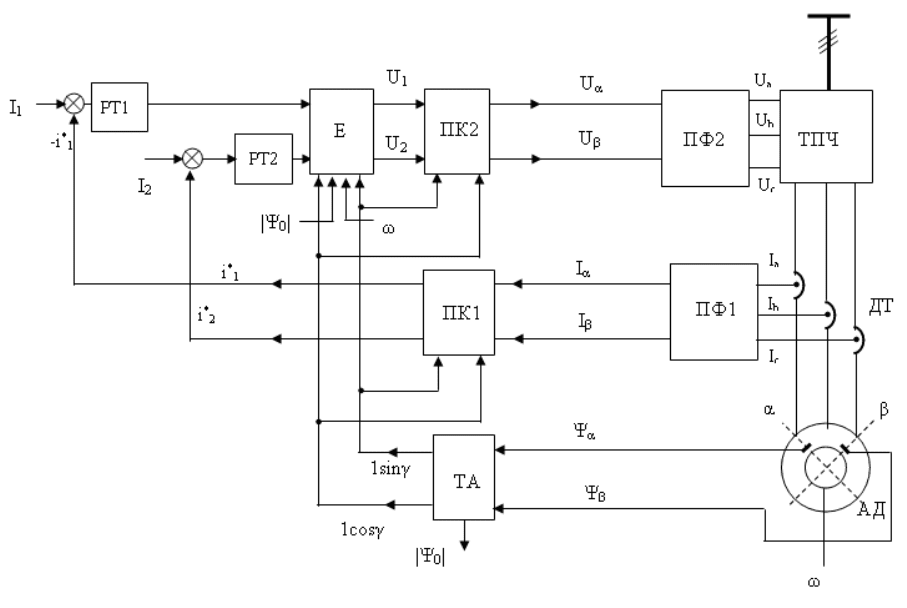
Для иллюстрации на рис.4 приведена принципиальная схема привода с подчи-
ненным регулированием трехфазного асинхронного двигателя с преобразователем час-
тоты. Система трефазных токов с помощью преобразователя фаз ПФ
1 преобразуется в
двухфазную. Сигналы управления двухфазным напряжением в неподвижных осях U
α
и
U
β
преобразуются в трехфазную систему также преобразователем фаз ПФ2.
С помощью датчиков Холла, установленных по осям α и β, определяются соот-
ветствующие составляющие главного потокосцепления, подаваемые на тригонометри-
Ī
r
Ψ
0α
Ψ
0
β
Ψ
0
Ī
r2 Ī
r1
Ī
S1
Ī
Sβ
Ī
Sα
Ī
S2
Ī
S
γ
2
1
α
β
Рис. 3
15
ческий анализатор, в котором вырабатываются нормированные значения опорных си-
нуса и косинуса (1sinγ и 1cosγ), а также определяется модуль потокосцепления.
Составляющие вектора тока статора i
α
и i
β
в блоке преобразования координат
ПК1 преобразуются в сигналы постоянного тока i*
1
и i*
2
, соответствующие току, фор-
мирующему электромагнитный момент, и намагничивающему току. Эти сигналы срав-
ниваются с заданными значениями токов на входе регуляторов РТ1 и РТ2.
В блок Е подаются также сигналы скорости и модуля главного потокосцепления
для компенсации влияния ЭДС двигателя. На выходе этого блока вырабатываются сиг-
налы постоянных напряжений U
1
и U
2
по осям 1 и 2. С помощью преобразователя коор-
динат ПК2 эти сигналы превращаются в двухфазную систему переменных напряжений
U
α
и U
β
, которые преобразователем фаз ПФ2 преобразуются в трехфазную систему.
Сигнал тока намагничивания I
2
вырабатывается регулятором модуля потокосце-
пления, обеспечивающим постоянство |Ψ
0
|. Сигнал задания тока I
1
, определяющего
электромагнитный момент двигателя, вырабатывается контуром регулирования скоро-
сти, аналогично тому, как это делается в электроприводах постоянного тока.
Отметим, что в качестве опорного вектора для ориентации вращающейся систе-
мы координат может быть взят не вектор главного потокосцепления Ψ
0
, а другой век-
тор, например, вектор потокосцепления ротора Ψ
r
, как это сделано фирмой «Сименс» в
системе «Трансвектор». Однако, вектор Ψ
0
в схеме измеряется непосредственно, а век-
тор Ψ
r
должен быть вычислен исходя из вектора Ψ
0
через параметры электрической
машины, которые не постоянны, что менее удобно для реализации системы управле-
ния. Система с опорным вектором и со стабилизацией Ψ
r
теоретически обладает боль-
шей перегрузочной способностью. В то же время система управления электроприво-
дом при ориентировании по вектору потокосцепления Ψ
0
получается более простой и
более удобной для реализации.
Рис. 4
16
Литература
1.Ключев В.И. Теория электропривода. М.: Энергоатомиздат, 1985.
2.
Рудаков В.В., Дартау В.А., Столяров И.М. Асинхронные электроприводы с
векторным управлением. Л.: Энергоатомиздат, 1987.
3
. Рудаков В.В. Электроприводы с программным управлением и последователь-
ной коррекцией.// Ленинградский горный институт, Л.: 1990.
4.Системы подчиненного регулирования электроприводов переменного тока с
вентильными преобразователями /
О.В. Слежановский, Л.Х. Дацковский, И.С. Кузнецов
и др. М.: Энергоатомиздат, 1983.
5.
Дартау В.А., Алексеев В.В. Средства автоматики электроприводов с блочным
векторным управлением.// Ленинградский горный институт, Л.: 1986.
6. Элементы системы управления частотным приводом с подчиненным вектор-
ным управлением / В.В.Алексеев, В.А.Дартау, В.В.Рудаков, Ю.П.Павлов,
Е.М.Смирнов // Электротехническая промышленность. Электропривод. - 1981. - Вып.
4/93. С.5-9.
7.
Гультяев А.К. MATLAB 5.2. Имитационное моделирование в среде Windows:
Практическое пособие. -СПб.: КОРОНА принт, 1999.
17
ПРИМЕР ВЫПОЛНЕНИЯ РАБОТЫ
Министерство образования Российской Федерации
Санкт-Петербургский государственный горный институт
(технический университет)
КВАЛИФИКАЦИОННАЯ ВЫПУСКНАЯ РАБОТА
Академическая степень: БАКАЛАВР
Направление: “551300 – Электротехника, электромеханика, электротехнологии”
ЗАДАНИЕ
Студенту О. Ю. Кореневой группа ЭР-99-2
1.ТЕМА: “МОДЕЛИРОВАНИЕ И РАСЧЕТ АСИНХРОННОГО ЧАСТОТНОГО
ЭЛЕКТРОПРИВОДА ВРАЩАТЕЛЯ БУРОВОГО СТАНКА”
2. Исходные данные: Научные работы проф. В.В. Рудакова, А.Е.Козярука. Данные
привода вращателя: Автоматизированный электропривод станков шарошечного бу-
рения / В.В. Алексеев, А.С. Соловьев. СПГГИ, 1997
З. Содержание пояснительной записки: 1. Технические требования. Расчет мощности
и выбор
двигателя. 2. Выбор схемы модели АД, САУ и расчет регуляторов. 3. Моде-
лирование переходных процессов в электроприводе
.
4. Перечень графического материала: 1. Переходные процессы в приводе.
2. Функциональная схема электропривода вращателя бурового станка.
3. Структурная схема электропривода.
5. Дополнительные условия: В качестве примера взять станок СБШ-250МН, использо-
вать при моделировании программу ДИСПАС.
Срок окончания: 25 июня 200 г.
Руководитель: доц. В.В. Алексеев
18
ПРИМЕР СОДЕРЖАНИЯ
Введение…………………………………………………………………………….
1.
Технические требования …………………………………………………………
2.
Обоснование выбора типа привода ……………………….…………………….
3.
Расчет мощности и выбор двигателя привода вращателя ……………………..
4.
Математическая модель асинхронного двигателя ……..……………………..
5.
Функциональная схема электропривода с векторным управлением………....
6.
Структурная схема системы векторного управления ……………..….……….
7.
Моделирование переходных процессов в электроприводе ..…………….…...
8. Заключение…………………………………………………………………….….
Список литературы……………………………………………………………….
19
Введение
При бурении взрывных скважин для сравнительно крепких пород применяются
станки вращательного, ударно-вращательного бурения, а для пород высокой крепости,
особенно при малых объемах бурения - станки ударного бурения.
Из различных способов проходки взрывных скважин наиболее широкое распро-
странение в нашей стране, а также за рубежом получил способ проходки с помощью
станков шарошечного
бурения.
Станки шарошечного бурения, до некоторого времени имели нерегулируемый
электропривод вращателя. Это тормозило повышение производительности работ. В на-
стоящее время стали применяться станки с электроприводом по системе ТП-Д. Однако
применение двигателя постоянного тока связано с увеличением времени простоев на
регламентные работы на щеточно-колекторном аппарате. Этим недостатком не страда-
ет регулируемый привод с преобразователем частоты (ТПЧ) и асинхронным коротко-
замкнутым двигателем АД.
Проектирование привода переменного тока по системе ТПЧ-АД требует выбора
электродвигателя, расчета и моделирования процессов в двигателе.
Переходные процессы в асинхронном приводе требуют расчетов с помощью
компьютерных программ. Цель данной работы – с помощью ДИСПАС определить со-
ответствие переходных
процессов в ТПЧ-АД поставленным требованиям.
Электропривод бурового станка СБШ-250МН
1. Технические требования
Вращатель станка служит для передачи крутящего момента буровому снаряду,
который приводит в действие через редуктор породоразрушающий инструмент и обес-
печивает совместно с механизмом подачи необходимый режим бурения. Условия рабо-
20
ты регулируемого электропривода характеризуются большой неравномерностью на-
грузки, вызванной изменением свойства забоя, характером процесса разрушения, воз-
никновением значительных вибраций при работе.
1. Массогабаритные показатели регулируемого электропривода должны соот-
ветствовать данным по размещению оборудования на платформе станка СБШ-250МН
(СБШ
−250МНА−32 ТУ.24.08.1358−84).
2. Режим работы вращателя бурения
− продолжительный − S1.
3. Диапазон регулирования частоты D=5…10.
4. Точность поддержания скорости во всех статистических режимах 5%.
5. Допустимое перерегулирование скорости 5%.
6. Перегрузочная способность во всем диапазоне М/М
н
2,5.
7. Напряжение питания от трехфазной сети
− 380 В.
8. Номинальная частота – 50 Гц.
9. Допустимое отклонение частоты ± 4%.
10. Средневзвешенный коэффициент мощности не менее 0,75 (с учетом наличия
компенсирующих устройств).
11. Режим работы продолжительный S1.
12. Требование по уровню автоматического управления:
а) автоматическое ограничение вибрации;
б) автоматическое управление по критерию постоянства мощности на вращении
или другого критерия, обеспечивающего наибольшую производительность или наи-
меньшую стоимость
одного метра проходки;
в) возможность взаимосвязанного управления приводом вращателя и приводом
подачи (и расходом промывочной смеси).
Виды управления: ручное и автоматическое.
13. Защита электропривода: