Шрейнер Р.Т. Системы подчиненного регулирования электроприводов. Часть1
Подождите немного. Документ загружается.

Для его
предотвращения предпринимаются описанные выше меры
(отстройка
внутреннего
задатчика,
предотвращающая
его
активизацию
на
заключительном этапе отработки рассогласования
во
внешнем
контуре
ЗИ).
Радикальной мерой
устранения
конфликта является
использование
в
качестве
внутреннего
ЗИ
задатчика
интенсивности
первого
порядка
с
раздельной установкой
темпов.
Типичные
процессы регулирования
в
позиционных
САР,
снабженных
входным
задатчиком
интенсивности
второго
порядка,
показаны
на
рис.
10.30.
Здесь
и -
внешний ступенчатый командный
сигнал
на
входе
ЗИ ; 0* -
формируемый
задатчиком
сигнал задания
положения.
Воздействия
А)
и
А
2
определяют уровень ограничения
соответственно первой
и
второй
производных
по
времени сигнала
задания
положения. Задатчик интенсивности
в
контуре положения
отсутствует.
Уровень ограничения первой производной сигнала
ЗИ
позволяет
ограничивать максимальную
скорость
двигателя
при
отработке
позиционных
перемещений независимо
от их
величины
(см.
рис.
10.30,а
и
10.30,6).
Величина динамического момента двигателя
при
реакции
на
управление зависит
от
уровня ограничения второй
производной сигнала
ЗИ. Для
ограничения момента
и
тока
якоря
при
реакции
на
возмущение (например,
при
перегрузках
на
валу двигателя)
САР
снабжается локальным ограничителем выхода
регулятора
скорости.
Используются также
некоторые
другие варианты решения
задач
ограничения переменных.
10.4.
Выводы
Проблема ограничения переменных
в
позиционных
САР
является
достаточно
сложной
и
неоднозначной
по
своему решению.
Существует
ряд
возможных
и
достаточно эффективных
частных
решений этой
проблемы.
Однако
в
силу существенной нелинейности
и
сложности
структуры
САР
выбор
конкретного решения следует производить
в
результате
тщательного
и
всестороннего учета особенностей
и
условий
работы
механизма,
а
также анализа динамики
САР с
учетом влияния
ее
инерционных
и
нелинейных элементов.
262
11.
Особенности учета свойств датчиков
в
системах
подчиненного
регулирования
Типовая
методика
синтеза регуляторов систем подчиненного
регулирования
базируется
на
идеализированных расчетных схемах,
в
которых
фигурируюг
безынерционные
единичные
обратные
связи
по
регулируемым переменным.
В
действительности датчики, используемые
для
реализации этих систем,
обладают
той или
иной степенью
инерционности
и
коэффициентами
передачи,
отличающимися
от
единицы.
В
связи
с
этим практические методики
синтеза
САР
включают
ряд
этапов:
-синтез
САР с
идеализированными датчиками (т.е.
с
единичными
безынерционными
обратными
связями);
-
разработку
функциональной
схемы,
выбор
элементной базы
САР
и
определение
параметров
датчиков регулируемых величин
;
-
модернизацию идеализированной структурной схемы
САР и
приведение
ее к
виду, позволяющему учесть инерционность датчиков
и
их
реальные
коэффициенты
передачи.
-
окончательную
доводку
структурной схемы
на
основе
дополнения
ее
элементами ограничения переменных
и
уточненного анализа
динамики
полученной
нелинейной
САР
методами математического
моделирования.
Рассмотрим вопросы учета свойств датчиков
на
примере синтеза
двухконтурной
САР
скорости
с
подчиненным
регулированием
тока
якоря.
11.1.
Внутренний
контур
САР с
неидеальным
датчиком
На
первоначальном этапе синтеза внутреннего
контура
САР
рассматривается
идеализированная
структурная схема контура тока
якоря, показанная
на
рис.
11.1.
Здесь
фигурирует
безынерционная
единичная
отрицательная
обратная
связь
по
току. Синтез
регулятора
тока
якоря производится
по
типовой методике, описанной
в п.
3.2.
Передаточная
функция
регулятора
тока
имеет
вид
>_ЛяР±!
(11.1)
где
Т[=2Т
Ц
.
;
При
неблагоприятном соотношении параметров
САР
тока
якоря
дополняется (см.
п.
3.4) компенсирующей положительной связью
по
ЭДС
двигателя.
263
~~<2Н
Регулятор Фильтр
Звено
объекта
тока
Пи„
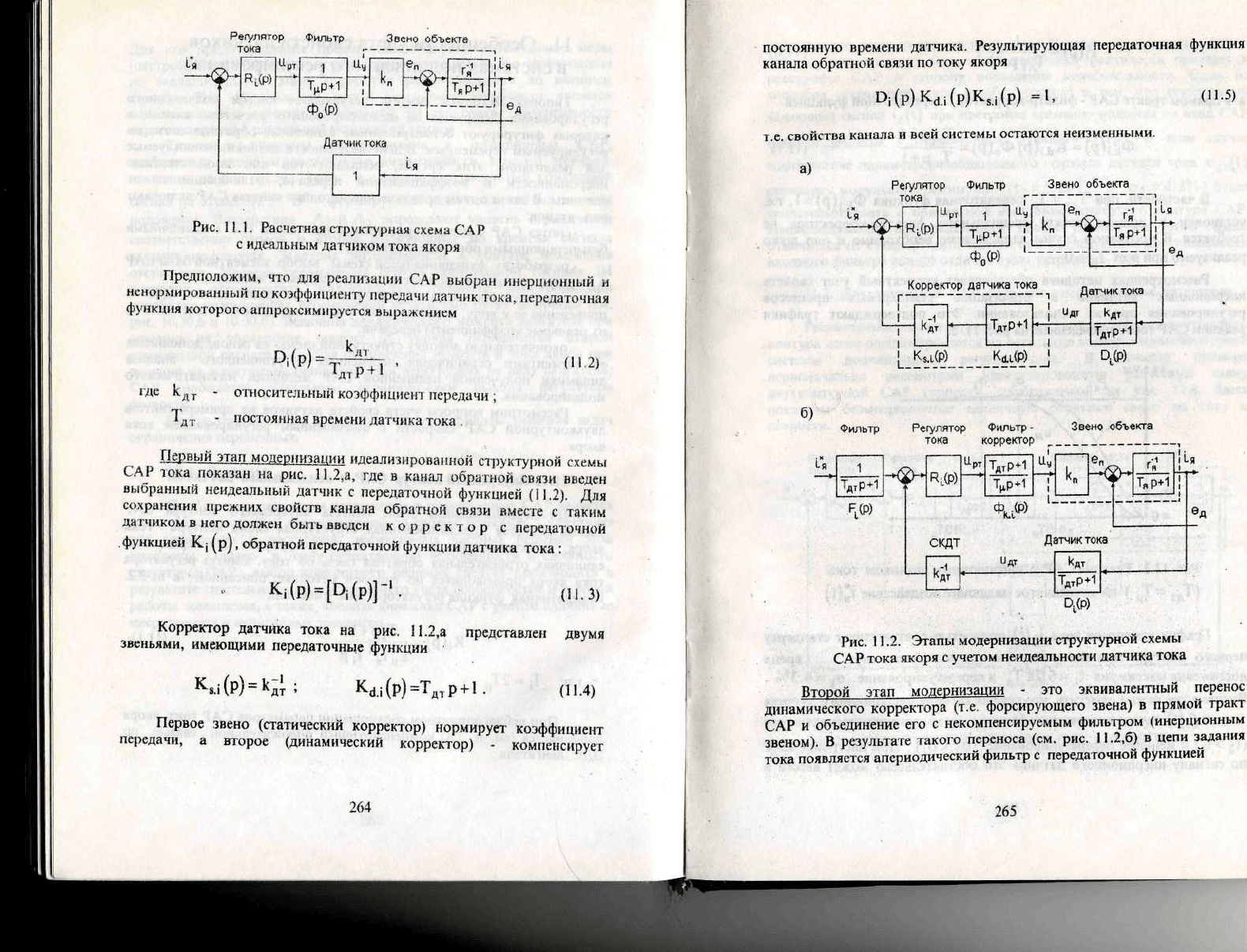
Рис.
11.1.
Расчетная
структурная
схема
САР
с
идеальным
датчиком
тока якоря
Предположим,
что для
реализации
САР
выбран
инерционный
и
ненормированный
по
коэффициенту
передачи датчик тока, передаточная
функция
которого
аппроксимируется
выражением
(11.2)
где
1с
„
'дт
относительный
коэффициент
передачи;
постоянная
времени датчика тока
.
Первый
этап модернизации
идеализированной
структурной схемы
САР
тока показан
на
рис.
11.2,а,
где в
канал обратной связи введен
выбранный
неидеальный датчик
с
передаточной
функцией
(11.2).
Для
сохранения
прежних
свойств канала обратной
связи
вместе
с
таким
датчиком
в
него должен
быть
введен
корректор
с
передаточной
.функцией
К)
(р),
обратной передаточной
функции
датчика
тока
:
'.
(11.3)
Корректор
датчика тока
на
рис.
11.2,а
представлен двумя
звеньями,
имеющими передаточные функции
К
8!
(р)
=
1с-
т
;
К
А1
(р)=Т
дт
р
+
1.
(11.4)
Первое звено (статический корректор) нормирует коэффициент
передачи,
а
второе
(динамический
корректор)
-
компенсирует
264
постоянную времени датчика. Результирующая передаточная функция
канала обратной связи
по
току якоря
=1,
(11.5)
т.е. свойства канала
и
всей системы остаются
неизменными.
а)
Регулятор Фильтр Звено объекта
тока
'
|Црт|
_1_
у+1рТ1
к
"
ГТП
т
*р*
1
1
Ф
О
(Р)
'
1
М
е
д
г
-
К
_°РР.
е
™В
«!™!11™
а
_
1
Датчик
тока
I
ГЛ.
1т
-
„I.
!
"
ДТ
I
*У
I...
Т\—[
1
*
Г]
(Тдт^ТГ
[__Ки_(Р)
^•^1
(
Р
)
_^
°1<Р)
Фильтр Регулятор
Фильтр-
Звено
объекта
тока
корректор
_1_ь<?и
п
,
ЛЧ
Ы^1
и;
-Г7~1
е
"хл
.ГП1!
|Т
дт
р+1|
'
1:
|вд
б)
Рис.
11.2.
Этапы
модернизации структурной схемы
САР
тока
якоря
с
учетом неидеальности датчика
тока
Второй
этап
модернизации
- это
эквивалентный перенос
динамического корректора
(т.е.
форсирующего звена)
в
прямой тракт
САР и
объединение
его с
некомпенсируемым фильтром (инерционным
звеном).
В
результате такого переноса (см. рис.
11.2,6)
в
цепи задания
тока появляется апериодический фильтр
с
передаточной
функцией
265
(11.6)
а в
прямом
тракте
САР -
фильтр-корректор
с
передаточной
функцией
(11.7)
В
частности,
при
Т
ДТ
=
Т
М
передаточная
функция
Ф^(р)?=1,
т.е.
установки
в
прямом
тракте специального фильтра-корректора
не
требуется.
В
противном случае данное звено необходимо
и оно
легко
реализуемо
при
всех
Тц
> 0 ,
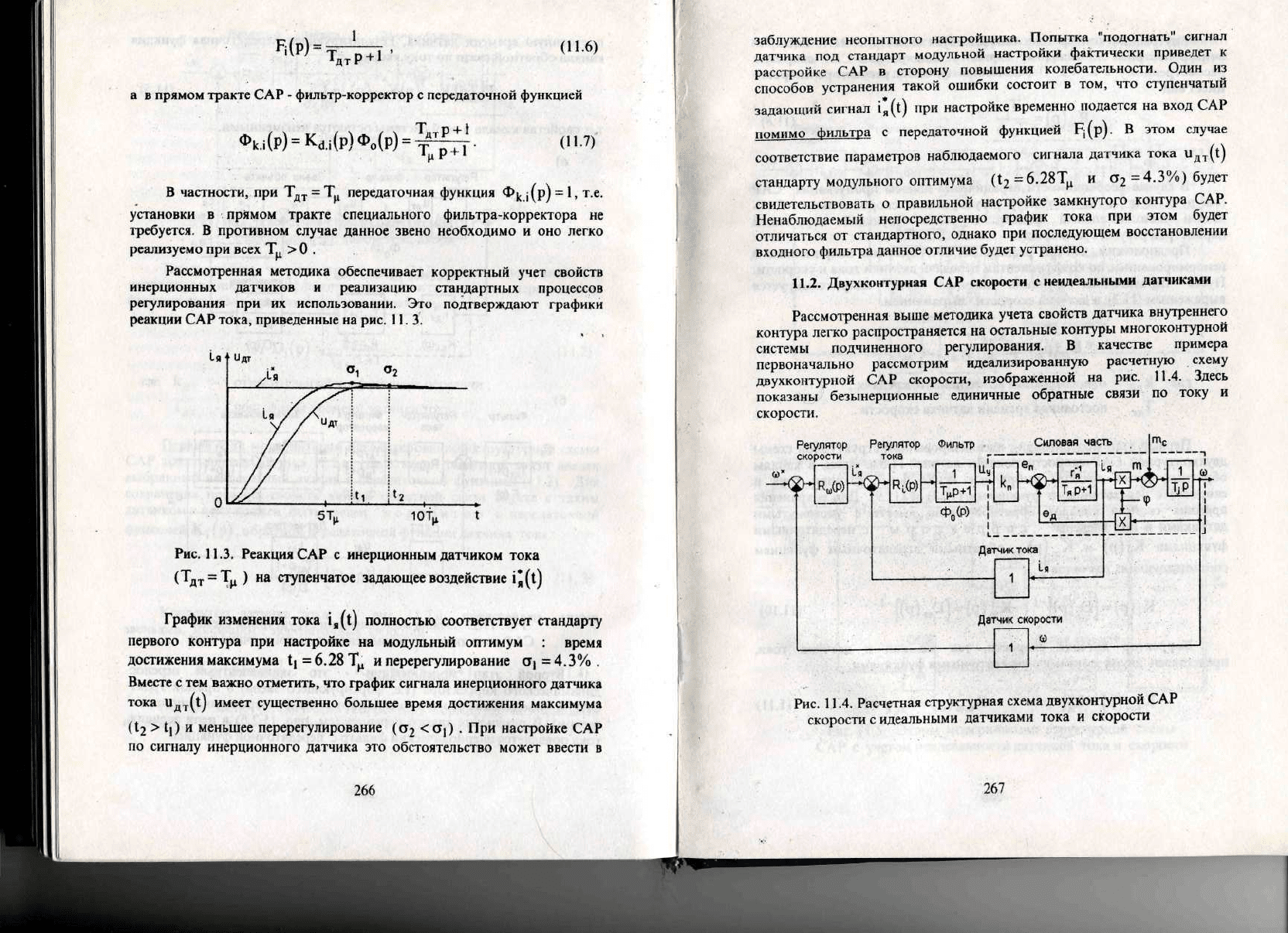
Рассмотренная методика обеспечивает корректный учет свойств
инерционных
датчиков
и
реализацию
стандартных процессов
регулирования
при их
использовании.
Это
подтверждают
графики
реакции
САР
тока,
приведенные
на
рис.
11.3.
О,
0
2
Рис.
11.3.
Реакция
САР с
инерционным датчиком
тока
(Т
дт
=
Тц
) на
ступенчатое
задающее
воздействие
1*(1)
График изменения
тока
1
Я
(1)
полностью
соответствует
стандарту
первого
контура
при
настройке
на
модульный оптимум
:
время
достижения максимума
1|=6.28Т„
и
перерегулирование
а!
=4.3%.
Вместе
с тем
важно
отметить,
что
график сигнала инерционного датчика
тока
и
дт
(1)
имеет существенно большее время достижения максимума
(12
>
I])
и
меньшее перерегулирование
(а
2
< Ст|) . При
настройке
САР
по
сигналу инерционного датчика
это
обстоятельство может ввести
в
266
заблуждение неопытного настройщика. Попытка
"подогнать"
сигнал
датчика
под
стандарт
модульной настройки
фактически
приведет
к
расстройке
САР в
сторону
повышения
колебательности. Один
из
способов
устранения такой ошибки
состоит
в
том,
что
ступенчатый
•* / \
задающий сигнал
1„(1)
при
настройке временно подается
на
вход
САР
помимо
фильтра
с
передаточной
функцией
Р|(р)-
В
этом случае
соответствие параметров наблюдаемого сигнала датчика
тока
и
Д1
(()
стандарту модульного оптимума
(1
2
=6.28Т
Ц
и ст
2
=4.3%)
будет
свидетельствовать
о
правильной настройке замкнутого контура
САР.
Ненаблюдаемый непосредственно график тока
при
этом
будет
отличаться
от
стандартного,
однако
при
последующем восстановлении
входного фильтра данное отличие
будет
устранено.
11.2.
Двухконтурная
САР
скорости
с
неидеальными
датчиками
Рассмотренная
выше методика учета свойств датчика внутреннего
контура легко распространяется
на
остальные контуры многоконтурной
системы подчиненного регулирования.
В
качестве примера
первоначально рассмотрим идеализированную расчетную схему
двухконтурной
САР
скорости, изображенной
на
рис,
11.4.
Здесь
показаны
безынерционные единичные
обратные
связи
по
току
и
скорости.
Регулятор
скорости
Регулятор
тока
Фильтр
Рис.
11.4.
Расчетная структурная схема двухконтурной
САР
скорости
с
идеальными датчиками
тока
и
скорости
267
Внутренний
контур тока
соответствует
схеме
рис.
11.1.
Внешний
контур построен
по
типовому варианту однократной
САР
скорости,
рассмотренному
в п.
4.2.
Передаточная
функция
регулятора скорости
имеет
вид
(11.8)
где
Т
Ю
=2Т;
.
В
случае необходимости ограничения полосы пропускания
САР
(см.
п.
6.1.2
и п.
8.2)
в
контур регулирования скорости может быть
введен
дополнительный фильтр
с
соответствующей коррекцией
параметров
регулятора
скорости.
Предположим,
что для
реализации
САР
выбраны инерционные
и
ненормированные
по
коэффициентам передачи датчики тока
и
скорости.
Пусть передаточная
функция
датчика тока аппроксимируется
выражением
(11.2),
а
датчика скорости
-
выражением
'•дс
ТдсР
+
1
'
(11.9)
где
к;
дс
-
относительный коэффициент передачи
;
Т
дс
-
постоянная
времени датчика скорости
.
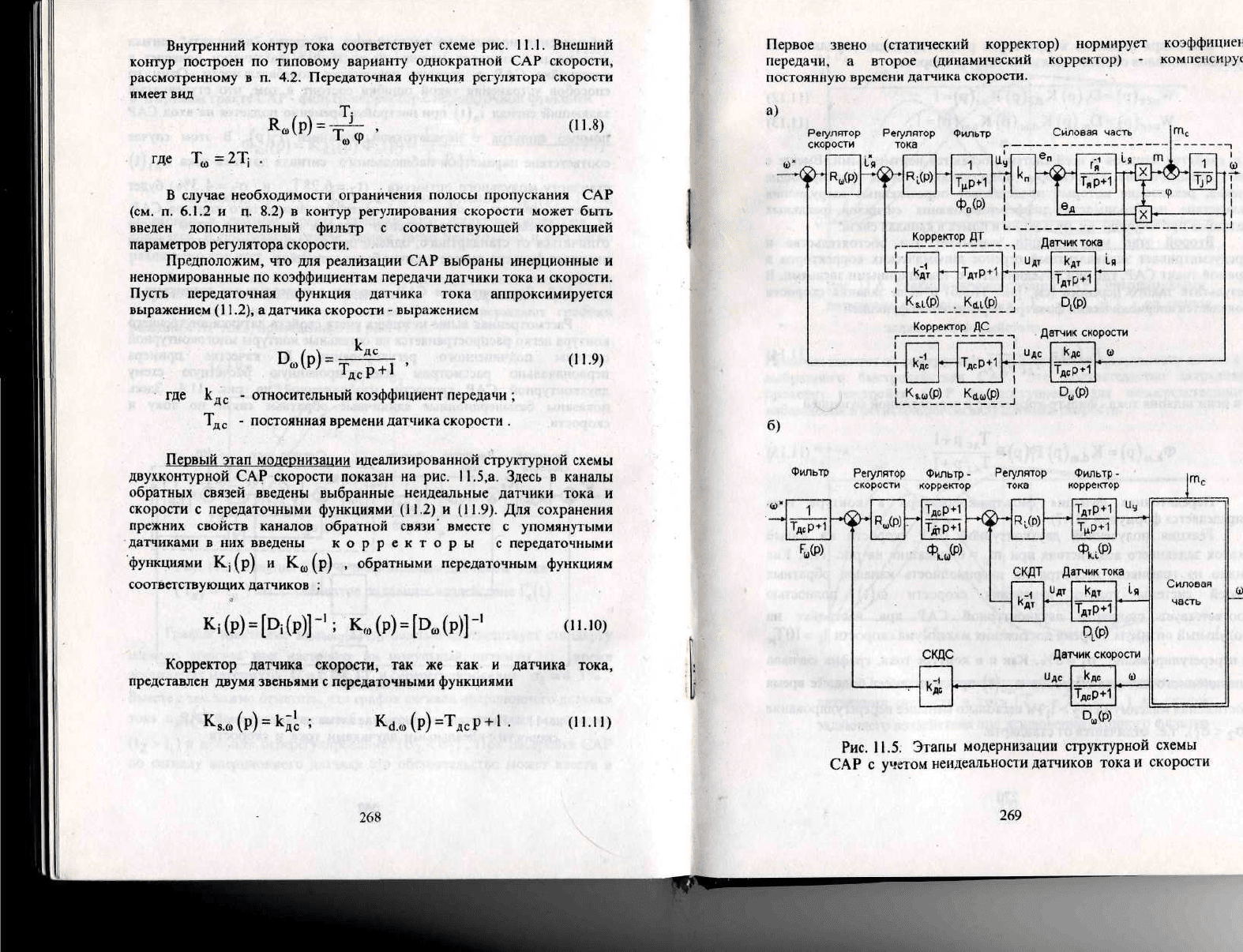
Первый
этап
модернизации
идеализированной структурной схемы
двухконтурной
САР
скорости
показан
на
рис.
11.5,а.
Здесь
в
каналы
обратных связей введены выбранные неидеальные датчики тока
и
скорости
с
передаточными
функциями
(11.2)
и
(11.9).
Для
сохранения
прежних
свойств каналов обратной
связи
вместе
с
упомянутыми
датчиками
в них
введены
корректоры
с
передаточными
функциями
К[
(р) и
К,,,
(р) ,
обратными передаточным
функциям
соответствующих датчиков
:
-1
(11.10)
Корректор
датчика
скорости,
так же
как
и
датчика
тока,
представлен двумя звеньями
с
передаточными
функциями
,(р)^
дс
(11.11)
268
Первое звено (статический корректор) нормирует
коэффициен
передачи,
а
второе
(динамический корректор)
-
компенсируе
постоянную
времени датчика скорости.
Фильтр
Регулятор Фильтр
-
скорости корректор
Регулятор Фильтр
-
тока корректор
т
с
1
ТдсР+1
Ч
^
Я
И
(Р)
|~*.
Т
дс
р
И
ТДтР+1
""1
скдс
С
>-
«1(Р)
СКДТ
К
дт
Д
идт
Тд
Т
р+1
Т^р+1
—
атчик
тока
Кдт
Т
дтР+
1
1я
Датчик
скорости
и
дс
Кдс
Тд
С
Р+1
4)
Силовая
часть
О»
Рис.
11.5.
Этапы модернизации структурной схемы
САР с
учетом неидеальности датчиков
тока
и
скорости
269
Благодаря введению корректоров результирующие передаточные
функции
каналов обратной связи
по
току
и
скорости
У/
ост
(р)=Ц(р)К
ал
(р)К
5!
(р)=1
;
(11.12)
^ОСС(Р)
=
О(0
(?)
К
а.(0
(Р)
К
8.Ш
(?)
=
1
,
<И
•
1
3)
т.е. свойства каналов
и
всей системы остаются неизменными. Вместе
с
тем, динамические корректоры представляют
собой
форсирующие
звенья,
реализация которых представляет определенные затруднения
вследствие
необходимости дифференцирования сигналов реальных
датчиков
при
наличии
их
пульсаций
и
помех
в
каналах связи.
Второй этап модернизации учитывает
эти
обстоятельства
и
предусматривает
эквивалентный перенос динамических корректоров
в
прямой
тракт
САР,
где они
объединяются
с
инерционными звеньями.
В
результате такого переноса
(см. рис.
11.5,6)
в
цепи задания скорости
появляется
апериодический фильтр
с
передаточной
функцией
1
(11.14)
а в
цепи задания тока
-
фильтр-корректор
с
передаточной функцией
Т
(11.15)
Передаточная
функция
фильтра-корректора
в
контуре тока
определяется формулой
(11.7).
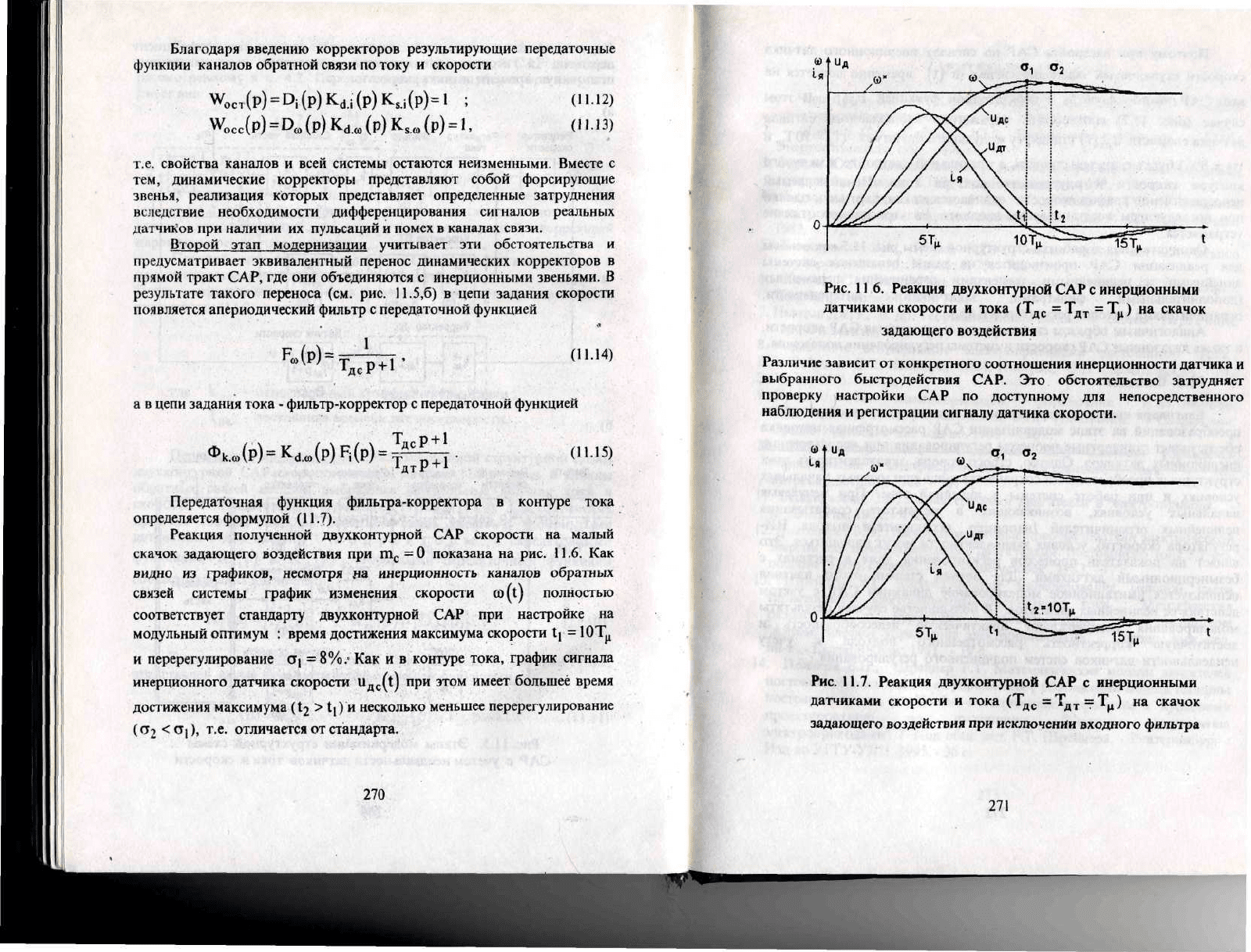
Реакция
полученной
двухконтурной
САР
скорости
на
малый
скачок
задающего воздействия
при
т
с
= 0
показана
на
рис.
11.6.
Как
видно
из
графиков,
несмотря
на
инерционность каналов обратных
связей
системы график изменения скорости
<в(1)
полностью
соответствует
стандарту двухконтурной
САР при
настройке
на
модульный
оптимум
:
время достижения максимума скорости
1[
=10Т^
и
перерегулирование
О|
=8%.-Как
и в
контуре тока, график сигнала
инерционного датчика скорости
и
дс
(1)
при
этом имеет большее время
достижения
максимума
(12 >
1|)
и
несколько меньшее перерегулирование
(ст
2
«Т|),
т.е.
отличаегся
от
стандарта.
270
о,
о
2
Рис.
11
6.
Реакция двухконтурной
САР с
инерционными
датчиками
скорости
и
тока
(Т
дс
=Т
ДТ
=Т„)
на
скачок
задающего воздействия
Различие
зависит
от
конкретного соотношения инерционности датчика
и
выбранного быстродействия
САР.
Это
обстоятельство
затрудняет
проверку
настройки
САР по
доступному
для
непосредственного
наблюдения
и
регистрации сигналу датчика скорости.
Рис.
11.7.
Реакция двухконтурной
САР с
инерционными
датчиками скорости
и
тока
(Т
дс
=Т
ДТ
=Т,)
на
скачок
задающего
воздействия
при
исключении
входного
фильтра
271
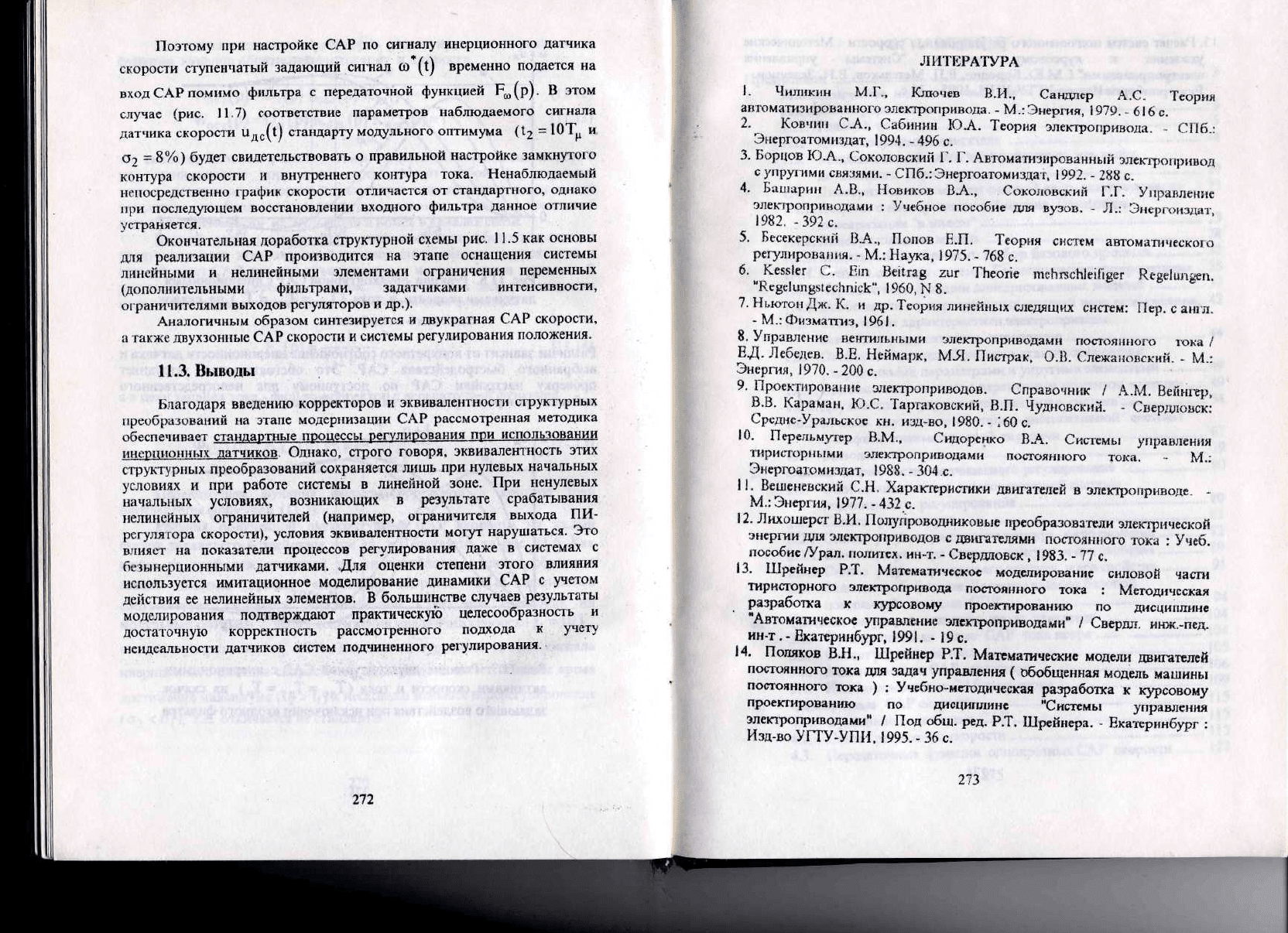
Поэтому
при
настройке
САР по
сигналу инерционного датчика
скорости
ступенчатый задающий сигнал
(О
(()
временно подается
на
вход
САР
помимо фильтра
с
передаточной функцией
Р
м
(р)-
В
этом
случае
(рис.
11,7)
соответствие параметров
наблюдаемого
сигнала
датчика
скорости
и
дс
(1:)
стандарту модульного оптимума
(12
=
10Т„
и
о
2
=8%)
будет
свидетельствовать
о
правильной настройке замкнутого
контура
скорости
и
внутреннего контура тока. Ненаблюдаемый
непосредственно
график скорости отличается
от
стандартного,
однако
при
последующем
восстановлении входного фильтра данное отличие
устраняется,
Окончательная
доработка
структурной схемы рис.
11.5
как
основы
для
реализации
САР
производится
на
этапе оснащения системы
линейными
и
нелинейными
элементами ограничения переменных
(дополнительными
фильтрами,
задатчиками
интенсивности,
ограничителями
выходов регуляторов
и
др.).
Аналогичным
образом синтезируется
и
двукратная
САР
скорости,
а
также
двухзонные
САР
скорости
и
системы регулирования положения.
11.3.
Выводы
Благодаря введению корректоров
и
эквивалентности структурных
преобразований
на
этапе модернизации
САР
рассмотренная методика
обеспечивает стандартные процессы регулирования
при
использовании
инерционных
датчиков. Однако,
строго
говоря, эквивалентность этих
структурных
преобразований сохраняется лишь
при
нулевых начальных
условиях
и при
работе
системы
в
линейной зоне.
При
ненулевых
начальных
условиях, возникающих
в
результате срабатывания
нелинейных
ограничителей (например, ограничителя выхода
ПИ-
регулятора
скорости), условия эквивалентности могут нарушаться.
Это
влияет
на
показатели процессов регулирования даже
в
системах
с
безынерционными
датчиками.
Для
оценки степени
этого
влияния
используется
имитационное моделирование
динамики
САР с
учетом
действия
ее
нелинейных элементов.
В
большинстве случаев результаты
моделирования
подтверждают
практическую целесообразность
и
достаточную корректность рассмотренного
подхода
к
учету
неидеальности
датчиков
систем подчиненного регулирования.
272
ЛИТЕРАТУРА
1.
Чилнкин
М.Г.,
Ключев
В.И.,
Сандлер
А.С.
Теория
автоматизированного
электропривода.
-
М.:
Энергия,
1979.
- 6!6 с.
2.
Ковчин
СА.,
Сабинин
Ю.А.
Теория
электропривода.
-
СПб.:
Энергоатомиздат,
1994.
- 496 с.
3.
Борцов
ЮА.,
Соколовский
Г. Г.
Автоматизированный
электропривод
с
упругими
связями.
-
СПб.: Энергоатомиздат,
1992.
- 288 с.
4.
Башарин
А.В.,
Новиков
ВА.,
Соколовский
Г.Г.
Управление
электроприводами
:
Учебное пособие
для
вузов.
-
Л.:
Энергоиздат,
1982.
-392с.
5.
Бесекерскмн
В.А.,
Попов
Е.П.
Теория
систем
автоматическою
регулирования.
-
М.:
Наука,
1975.
- 768 с.
6.
Ке5«1ег
С.
Е'т
Ве11га§
гиг
ТНеопе
теЬгесЫе|Г|§ег
Кеёе1ип§еп.
"Яе8е1ип881еспшсЬ",
1960.Ы
8.
7.
Ньютон
Дж. К. н др.
Теория
линейных
следящих
систем:
Пер.
с
англ.
-
М.:
Физматгиз,
1961.
8.
Управление
вентильными
электроприводами
постоянного
тока
/
ЕЛ-
Лебедев.
В.Е.
Неймарк,
МЛ.
Пистрак,
О.В.
Слежановский.
-
М.;
Энергия,
1970.
-200с.
9.
Проектирование
электроприводов. Справочник
/
А.М.
Всйнгер,
В.В.
Караман.
Ю.С.
Тартаковский,
В.П.
Чудновский.
-
Свердловск:
Средне-Уральское
кн.
изд-во,
1980.-
160с.
10.
Перельмутер
В.М.,
Сидоренко
ВА.
Системы управления
тиристорными
электроприводами
постоянного
тока.
-
М.;
Энергоатомиздат,
1988.
- 304 с.
11.
Вешеневский
С.Н.
Характеристики двигателей
в
электроприводе.
-
М.:
Энергия,
1977.
-432с.
12.
Лихошерст
В.И.
Полупроводниковые
преобразователи электрической
энергии
для
электроприводов
с
двигателями
постоянного тока
:
Учеб.
пособие
/Урал,
политех,
ин-т.
-
Свердловск
,
1983.
- 77 с,
13.
Шрейнер
Р.Т.
Математическое
моделирование
силовой
части
тиристорного
электропривода
постоянного тока
:
Методическая
разработка
к
курсовому
проектированию
по
дисциплине
"Автоматическое управление электроприводами"
/
Сверял,
инж.-пед.
ин-т.
-
Екатеринбург,
1991.
- 19 с.
14.
Поляков
В.Н.,
Шрейнер
Р.Т.
Математические
модели
двигателей
постоянного тока
для
задач управления
(
обобщенная модель машины
постоянного
тока
)
:
Учебно-методическая
разработка
к
курсовому
проектированию
по
дисциплине
"Системы
управления
электроприводами"
/ Под
общ. ред. Р.Т.
Шрейнера.
-
Екатеринбург
:
Изд-во
УГГУ-УПИ,
1995.
-
36
с.
273
\
Расчет
систем
подчиненного регулирования скорости
:
Методические
указания
к
курсовому проекту "Системы управления
электроприводами"
/
М.Ю.
Бородин, В.П.
Метельков,
В.И.
Зеленцов
-
Екатеринбург:
Изд
во
У1ТУ-УПИ,
1995.
- 36 с.
274
ОГЛАВЛЕНИЕ
Предисловие
'. 3
1.
Математические
модели
силовой
части
электропривода
как
объекта
управления
5
1.1.
Главная
цепь
5
1.2. Цепь
возбуждения
двигателя
14
1.3.
Модели силовой части электропривода
для
задач
двухзонного
управления
...:
20
.4.
Линеаризованные
модели силовой части электропривода ....
23
.4.1.
Понятие
о
линеаризованной
модели.
Процедура
линеаризации
"в
малом"
23
.4.2.
Линеаризованная
модель
28
.4.3. Модельный эксперимент. Выбор
базовою
процесса
32
.4.4.
Степени
свободы
системы. Геометрическая интерпретация
.. 35
.4.5. Передаточные функции
линеаризованных
моделей
37
.4.6. Особенности
линеаризованных
моделей
цепи
возбуждения..
42
.5.
Статические характеристики электропривода
как
объекта
двухзонного управления
44
.6.
Особенности моделей электромеханических систем
с
переменными
параметрами
и
упругими элементами
49
.бЛ.Одномассовая
система
с
переменным
моментом
инерции
49
.6.2.
Двухмассовая
упруго-диссипативная
система
54
.6.3. Модель
двухмассовой
упруго-диссипативной
системы
с
люфтом кинематической передачи
67
1.7.
Выводы
, 79
2.
Основы
теории
систем
подчиненного
регулирования
80
2.1.
Обобщенная схема многоконтурной системы
подчиненного
регулирования
80
2.2. Синтез регуляторов
82
2.2.1.
Синтез регулятора
первого
контура
и
его
свойства
82
2.2.2.
Синтез регулятора
второго
контура
и его
свойства
89
2.2.3.
Синтез регулятора
третьего
контура
и
его
свойства
91
2.3. Выводы
и
обобщения. Вопросы
выбора
базовой
постоянной времени
СПР
94
3.
Системы
регулирования
тока
якоря
двигателя
104
3.1.
Функциональная схема
САР
тока якоря
104
3.2. Синтез регулятора тока
105
3.3. Анализ свойств
САР
тока
якоря-
106
3.4. Комбинированные
САР
тока якоря
109
4.
Однократные
САР
скорости
115
4.1.
Функциональная
схема
САР
115
4.2. Синтез регулятора скорости
115
4.3. Передаточные
функции
однократных
САР
скорости
117
275
5.2.
5.3.
5.4.
5.5.
5.6.
4.4.
Реакции
САР
скорости
на
внешние
воздействия
120
4.5. Статические
механические
характеристики
электропривода
с
однократной
САР
скорости
124
4.6. Выводы
,
128
5.
Двукратные
(астатические)
САР
скорости
12.9
5,!.
Структурная схема двукратной
САР
скорости
129
Синтез
регулятора
130
Передаточные
функции
двукратных
САР
скорости
1.34
Реакции
двукратных
САР
скорости
на
внешние
воздействия
136
Механические
характеристики электропривода
с
астатической
САР
скорости
138
Выводы
139
6.
Частотные
характеристики
систем
автоматического
регулирования
скорости
141
6.1.
Частотные характеристики однократных
САР
скорости...
14!
6.1.1.
Реакции однократных
САР
скорости
на
гармонические
задающие воздействия
145
6.1.2.
У
чет
пульсаций датчиков скорости
147
6.1.3.
Реакции однократных
САР
скорости
на
периодические
возмущающие
воздействия
149
6.1.4.
Особенности проверки двигателя
по
нагреву
и
перегрузке..
151
6.2. Частотные характеристики двукратных
САР
скорости
153
6.2.1.
Реакции
САР
скорости
на
гармонические задающие
воздействия
154
6.2.2.
Реакции
САР
скорости
на
периодические
возмущающие
воздействия
157
6.3. Выводы
161
7.
Ограничение
переменных
в
структурах
подчиненного
регулирования
:
162
7.1.
Ограничение
задающих воздействий
для
локальных САР...
162
7.2.
Ограничение
переменных
с
помощью
задатчиков
интенсивности
166
7.2.(.Реакции
однократных
САР
скорости
168
7.2.2.
Реакции двукратных
САР
скорости
176
7.3. Выводы
178
8.
Учет дополнительных
ограничений
180
8.1.
Анализ производной тока якоря
по
времени
в
системах
подчиненного
регулирования
•.
180
8.2.
Ограничение
производной тока якоря
путем
введения
в
контур скорости
дополнительного
фильтра
183
8.3.
И,сщ>льзовзнй!5
чадатчиков
интенсивности
в
цепи
задания
скорости
187
276
9.
10.
11.
8.4.
Ограничение
производной
тока
якоря
в
двукратных
САР
скорости
191
8.5.
Выводы
196
Двуконные
САР
скорости
197
9.1.
Синтез
регуляторов
двухзонной
САР
скорости
199
9.1.1.
Синтез
регулятора
тока
якоря
9.1.2.
Синтез
регулятора
скорости
9.1.3.
Синтез
регулятора
магнитного
потока
9.1.4.
Синтез
регулятора
ЭДС
200
200
202
208
•
«г
с
.
,
9.2.
Полная функциональная схема
двухэонной
САР
скорости..212
9.3.
Особенности
динамики
электроприводов
с
двухтонными
САР
скорости
....217
9.4.
Статические
характеристики
электроприводов
с
двухзонными
САР
скорости
219
Системы
автоматического
регулирования
положения
223
10.1.
Однократные
САР
положения
223
10.1.1.Передаточные
функции
однократных
САР
положения
226
10,1,2.Реакции
однократных
САР
положения
на
внешние
воздействия
, 229
10.1.3.Статн
ческие
механические
характеристики
электропривода
с
однократной
САР
положения
233
10.2.
Двукратные
(астатические)
САР
положения
234
10.2.(.Передаточные
функции астатических
САР
положения
.....
236
10.2.2.Реакции
астатических
САР
положения
на
внешние
воздействия
238
10.2.3.Механические
характеристики
электропривода
с
астатической
САР
положения
241
10.3.
Ограничение переменных
в
САРлоложення
242
10.3.1.
Оптимальная
диаграмма
позиционного
перемещения
с
ограничением
координат
и
принципы
ее
реализации
242
10.3.2.Синтез
нелинейного
регулятора
положения
245
I
О.З.З.Особенностн
реализации
нелинейных
САР
положения
....
249
103.4
.Позиционные
С
АР
с
задатчиками
интенсивности
второго
порядка
259
10.4.
Выводы
262
Особенности
учета
свойств
датчиков
в
системах
..............................
„.......„<
263
подчиненного
регулирования
11.1.
Внутренний
контур
САР с
неидгалышм
датчиком
263
11.2.
Двухконтурная
САР
скорости
с
неидеальными
датчиками...267
11.3.
Выводы
272
Литература.
..273
277
Рудольф
Теодорович
Шрейнер
СИСТЕМЫ ПОДЧИНЕННОГО
РЕГУЛИРОВАНИЯ
ЭЛЕКТРОПРИВОДОВ
Часть
1.
Электроприводы
постоянного тока
с
подчиненным
регулированием координат
Учебное
пособие
для
вузов
Редакторы
С.И.
Калинкина,
Л.И.Кузнецова,
И.М.
Цнклина
Лицензия
ЛР
040 328 от
10.04.97
Подписано
в
печать
24.03.1997.
Формат
60x84/16.
Бумага
писчая
N
1.
Усл. печ.
л.
15.36.
Уч.-изд.
л.
16.66.
Тираж300
экз.
Заказ
зоэ
Издательство
Уральского
государственного
профессионально-педаго-
гического
университета.
Екатеринбург,
ул.
Машиностроителей,
11.
АООТ
''Полиграфист".
Екатеринбург,
ул.
Тургенева,
20.
Инженерно-техническое
предприятие
"АСК"
и
Объединение
"ШТОРМ"
проводят
переоснащение
производства
"под ключ"
с
применением
отечественного
и
зарубежного
электрооборудования (АВВ,
5|етеп&)
Па
многих
предприятиях
России
и
СНГ
были
проведены
работы
по
реконструкции
сложных
технологических
агрегатов.
Среди
заказчиков
-ВИЗ
(Стан
"1300",
Агрегат
электроизоляционного
покрытия),
-Михайловский
заводОЦМ
(Стан
"1800",Стан
"Кварто-250",
Агрегат
сдваивания
фольги),
-Таджикский
алюминиевый
завод (Литейный
агрегат
производства
алюминиевой
полосы,
стан
"ДУО
720-1000"),
-
Молдавский
металлургический
завод
(Мелкосортный стан горячей
прокаткиI
и
мнете
другие.
Мы
предлагаем комплексное
решение,
включающее
проектирование
комплектацию,
поставку
и
наладку электроприводов
и
систем
регулирования
а
также
гарантийное
и
сервисное обслуживание; обладаем
30-летним
опытом
пуско-наладочных
работ
сложных
промышленных
объектов
Сотни
покупателей
электротехнического
и
энергетического оборудования
довольны
нашими ценами
и
уровнем обслуживания.
Мы
внедряем новейшие
технологии
цифрового
управления
электроприводами
постоянного
и
переменного
токае
использованием
оборудования
фирм
АВВ и
Яетет
и
компьютерного
управления
технологическими
процессами.
Нами
были изготовлены
системы
управлении
током
серии
электролизеров
для
алюминиевых
заводов
в
Братске
Иркутске
и
Каменск-Уральском;
внедрена система
технического
учета
электроэнергии
на
Михайловском
заводе ОЦМ,
разработана
беспроводная
межкошроллсрная
связь
для УВД
Свердловской
облает.
Успешно
работают
электроприводы
в
'1
сатре
Оперы
и
Балета
и
на
Жировом комбинате
г.Екатеринбурга.
\
Для
более
подробной
информации
по
проектированию,
разработке,
\
реконструкции,
наладке
обратитесь
па
предприятие
"ЛСК":
620049
А/я-148,
пср.Лтомагнкп,
10,
г.Нкагеринбург
Телефон
_(^32074
;
06-55,_факс
(3432)74-4_7~90
^_
но
посгавк-им
электротехническою
и
энергетического
оборудования
- в
объединение
"Шторм-Экером"
(распределительные
панели
1ЦО,
Камеры
КСО,
Трансформаторы
масляные
1
М,
Комплектные
трансформаторные
подстанции
КТ11,
Кошакторы
КГ,
Пускатели
ПМА,
ПМЕ,
выключатели
ВЛ,
Распределительные
силовые
шкафы
ШРС,
электродвигатели
серии
АИР, 4АМ;
вентиляторы
Ц14-46,
ВЦ6-28
Ц9
55
Ц4-
70, Ц!
17-40,
В06-30;
насосы
СМ,
ЦНСГ,
ОЦВ.
типа
Д,
консольные типа
К,
моноблочные типа
КМ,
химические
X)
620026
г.Екатеринбург,
ул.Ленина,
85,
офис
216,
телефон
(3432)44-95-93,
44-95-91,
факс 55-70-02
620219
г.Екатеринбург,
ул.Комсомольская,
37,
офис
504
телефон
(3432)49-43-44,
49-44-45,
факс
49-46-77
но
поставкам
сварочного
оборудования
- на
предприятие
"Шторм-ИТС"
(трансформаторы,
выпрямители,
полуавтоматы, установки
аргонр-дуговой
сварки,
машины
контактной сварки, горелки,
реостат
балластные
и
пр.)
620026,
г.Пкатеринбург,
ул.Ленина,
85,
офис
218
телефон/факс
(3432)44-95-73
но
поставкам
подъемно-транспортного
оборудовании
- на
предприятие
"Шторм-Техно" (краны мостовые,
комовые,
консольные,
штабелеры,
тали
и
гелырсры)
620219,
г.Нкатерниоург.л'л.Комсомольская,
37,
офис
502
тел/факс
(3432)49-44-99,
49-44-%
279