Шпоры по ТММ
Подождите немного. Документ загружается.

30)Условие статической
определимости
Для каждого звена плоского
механизма можно составить 3
уравнения статики. Если плоская
кинематическая цепь состоит из n
звеньев, то для нее можно записать
3n уравнений равновесия. Эта цепь
будет статически определимой, если .
3*n=2*p5+p4
Для кинематической цепи,
содержащей пары только пятого
класса, условие статической
определимости имеет вид:
3*n=2*p5 . (4.5)
Формула (4.5) описывает условие
существования структурной группы.
Таким образом, структурные группы
статически определимы. Это и
определяет порядок силового расчета
механизмов. Силовой расчет
начинают с прицепной структурной
группы и проводят в порядке,
обратном порядку присоединения
структурных групп к исходному
механизму. В последнюю очередь
определяются силы, действующие на
ведущее звено.
2 кинематическая пара-
соединение 2-х звеньев допускающее
их относительное перемещение
1)Высшие пары – пары, в которых
контакт осуществляется по линии.
2)Низшие пары – пары, в которых
контакт осуществляется по
поверхности.
В зависимости от числа степеней
свободы каждого из звеньев,
кинематические пары делят на
классы, класс определяет кол-во
ограничений
SH 6
.
Пара первого_класса:
1S
5H
.
Пара второго класса:
2S
;
4H
.
Пара третьего класса:
3S
;
3H
.
Пара четвёртого класса:
4S
;
2H
.
Пара пятого класса:
5S
;
1H
3)Кинематическая цепь – звенья,
связанные между собой
кинематическими парами различных
классов.:
1)простые 2)сложные
3)закрытые 4)открытые
Механизм-кинематическая цепь с
одним неподвижным звеном,
совершающая вполне целесообразное
движение
4)Подвижность
6K-Sц
=
H
ц-кол-во степеней свободы
цепи
Н
ц
=6п-Р
1
-2Р
2
-3Р
3
-4Р
4
-5Р
5
W=3n-P
4
-2P
5
-плоский механизм
5)q
пр
=W
0
-W
м
-W
пр
-число
избыточных связей(звенья не
определяющие движения выходного
звена)
6) принцип образования плоских
механизмов(принцип Ассура)
Любой плоский механизм можно
представить как совокупность
простейших кинематических цепей,
одна из которых имеет подвижность
равную подвижности механизма, а
остальные имеют нулевую подвижность
W =W+0+0+0+0+…+0
Цепь с подвижностью равной
подвижности механизма называется
исходным мех-ом, а цепи с нулевой
подвижностью называются струк-ой
группой(группой Ассура)
7)Структурной группой называют
простейшую кинемат цепь
содержащую тока пары 5го класса,
которая после присоединения к
стойке теряет столько степей
свободы(Н), сколькоона имела до
присоединения
W=3n-P
4
-2P
5
P
5=
3n/2-условие существования стр
гр
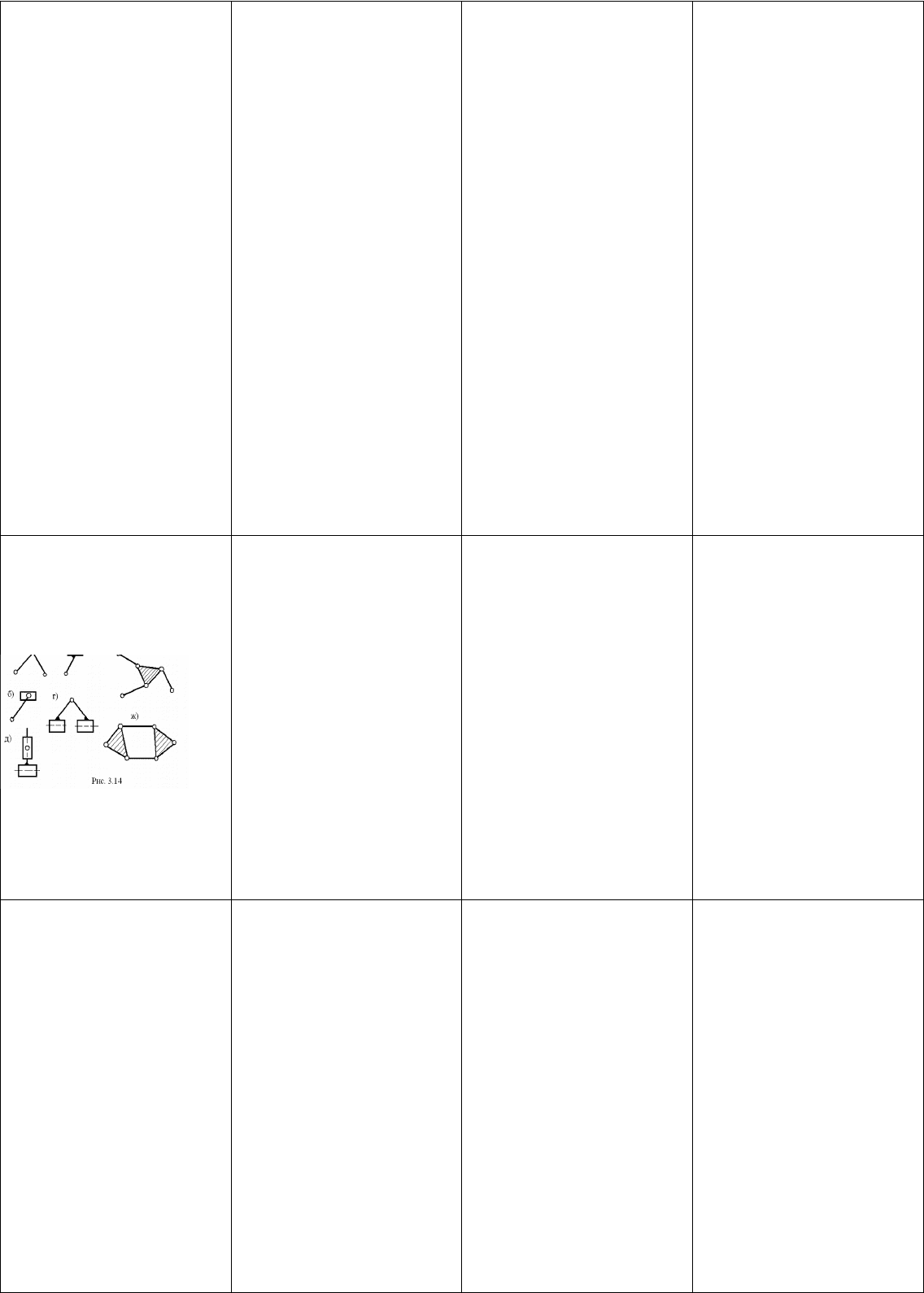
8)Класс структурной группы
определяется кол-вом
кинематических пар в наиболее
сплошном замкнутом контуре,
порядок структурной группы
определяется колвом кинемат пар,
которые группа может использовать
для присоединения.
А-д-2ой класс 2ой порядок
Е-3 класс 3 порядок
Ж-4 класс 32 порядок
9) Цель кинематического анализа
– изучение движения звеньев
механизма.
Задачи кинематического анализа:
определение перемещений, скоростей
и ускорений звеньев и точек звеньев.
Методы кинематического анализа:
1Графический или метод
кинематических диаграмм;
2графоаналитический (метод планов);
3аналитический;
4экспериментальный.
10) метод кинематю диаграмм -
методы получения численных решений
различных задач путём графических
построений. Г. в. представляют систему
построений, повторяющих или
заменяющих с известным
приближением соответствующие
аналитические операции. Графическое
выполнение этих операций требует
каждый раз последовательности
построений, приводящих в результате к
графическому определению искомой
величины.
Достоинства Г. в. — простота их
выполнения и наглядность.
Недостаток — малая точность
получаемых ответов.
11)Графическое интегрирование.
Вычисление определенного интеграла
основано на замене графика
подинтегральной функции y = f(x)
ступенчатой ломаной.
12)Графическое
дифференцирование. График
производной можно строить по
значениям тангенса угла наклона
касательной к графику данной функции
в различных его точках. Точность
такого построения мала из-за больших
погрешностей при определении
направлений касательных. График
производной строят также по секущим,
13)Виды движений
Поступательное движение, движение
твёрдого тела, при котором прямая,
соединяющая две любые точки тела,
перемещается параллельно самой себе.
При П. д. все точки тела описывают
одинаковые траектории и имеют в
каждый момент времени одинаковые по
численной величине и направлению
скорости и ускорения.
Вращение звена-при вращении звена
вокруг неподвижной оси траекториями
движения точек являются окружности,
центы которых лежат на оси вращения,
Плоско-параллельное движение. При
плдоско-параллельном движении звена
траекториями 2х любых точек звена
являются несовпадающие и
неэквидестантные
14)Графо-аналит метод
Задачи: определение перемещений,
скоростей и ускорений звеньев и
точек звеньев.
Порядок:Расчет начинают
с исходного механизма, затем
выполняется расчет структурных
групп в порядке их присоединения к
исходному механизму.
1)Расчет скоростей
2)Расчет ускорений
18)Передаточное отношение
механизма − отношение угловых
скоростей ведущего и ведомого
звеньев
Закон зацепления.
Связь между
кинематическими и геометрическими
характеристиками механизма
устанавливает основной закон
зацепления.
Нормаль к контактирующим
поверхностям делит межосевое
расстояние на отрезки, обратно
пропорциональные угловым
скоростям, точка пересечения
нормали и межосевой линии
является мгновенным центром
скоростей и называется полюсом
зацепления. Если полюс занимает
неизменное полпжение на
межосевой линии, то передаточное
положение постоянно, в
противном случае переменно.
19) Зубчатые мех-мы делятся на
простые и сложные, на мех-мы с
подвижными и не подвижными
осями колёс.
Мех-мы с подвижными осями
называются эпициклическими.
24) метод Виллиса. Суть его состоит
в следующем. Чтобы определить
угловую скорость ведомого звена
эпициклического механизма, надо
остановить водило. Для этого всему
механизму, включая стойку, мысленно
сообщают дополнительное вращение с
угловой скоростью . В результате
сложения действительного и
дополнительного движений водило
останавливается, а угловые скорости
остальных звеньев механизма
изменяются. . При этом механизм
преобразуется в механизм с
неподвижными осями колес, для
которого можно составить формулу
передаточного отношения.
35) Эвольвентой круга называется
плоская кривая, которую вычерчивает
точка, лежащая на прямой,
перекатываемой без скольжения по
неподвижной окружности.
Основные свойства:
- Эвольвента не имеет точек внутри
основной окружности.
- Нормаль, проведённая в любую
точку эвольвенты проходит по
касательной к основной окружности.
iii
BЭ
.
- Точки касания нормалей с основной
окружностью образуют центр
кривизны эвольвенты. То есть
основная окружность представляет
собой геометрическое место центров
кривизны эвольвенты.
- Любая ветвь эвольвенты вполне
определяется величиной радиуса
основной окружности (
b
r
) и
положением начала отсчёта
эвольвентного угла (
).
34)
Передаточное число () равно
отношению чисел зубьев большего
колеса к меньшему: при >.
Линия зацепления –
геометрическое место точек контакта
в неподвижной системе координат.
Угол зацепления – угол
между общей нормалью к
контактирующим поверхностям и
касательной к начальным
окружностям.
Шаг () – расстояние между
одноименными точками соседних
зубьев.
15 планы скоростей и ускорений.
Графо-аналитический метод
заключается в построении планов
скоростей и ускорений. Планом
скоростей (ускорений) называют
векторное масштабное изображение
этих параметров для
соответствующего положения
механизма. Этот метод отличается от
графического возможностью
определения не только величины
скорости и ускорения для всех
подвижных звеньев механизма.
26) Силовой расчёт.
Задачи: - Определение сил,
действующих на звенья или на связи
механизма.
- Определение уравновешивающей
силы (уравновешивающего момента)
на входном звене.
Цели: - Накопление необходимых
данных для последующего
проектирования и конструирования
механизма
Методы реш:
1)принцип Даламбера:если добавить
силу энерции, то система будет
находиться в мгновенном равновесии и
к ней применимы все законы статики
2) Состояние механ системы не
изменится, если связи отбросить, а их
действие заменить реакциями
0
111
k
i
i
k
i
Иi
k
i
i
RPP
0
1
0
1
0
1
0
k
i
i
k
i
Иi
k
i
i
RMPMPM
28) Силы, действующие на звенья
машины, их характеристики
-Движущие силы Р
Д.С.
или их моменты
М
Д.С.
. Работа их за цикл всегда
положительна.
- Силы Р
П.С.
или моменты М
П.С.
технологического или полезного
сопротивления. Выполнение машиной
технологического процесса связано с
преодолением сопротивлений,
называемых полезными.
- Силы тяжести G, определяемые
материалом и конструкцией звена. В
ряде случаев вес звеньев механизма
оказывает значительное влияние на
нагрузку кинематических пар.
- Силы упругости Р или момент от сил
упругости звеньев М
Р
. Любое звено
машины до известной степени
деформируемо; потенциальная энергия,
определяемая деформацией звена в
момент накопления её (зарядки), берёт
на себя часть работы движущих сил, и
в следующий момент (разрядки)
потенциальная энергия превращается в
кинетическую, помогая движению
отдельных звеньев машины.
- Силы «пассивных» сопротивлений Т
или их моменты М
Т
. Это могут быть
силы трения, силы сопротивления
воздушной или жидкой среды
- Силы инерции Р
И
и моменты от сил
инерции М
И
- Реакции связи.
Внешними силами являются: силы
веса, сопротивления о среду.
Внутренними силами являются
усилия, возникающие в связях.
5) Лишние степени свободы.
Избыточные и пассивные связи и
звенья.
ОТВЕТ: Если действительное число
степеней свободы не совпадает с
расчетным, то это свидетельствует о
наличие пассивных связей.
Пассивной называют такую связь,
удаление которой не разрушает
движение механизма в целом.
Различают полезные и вредные
(избыточные) пассивные связи.
Полезные пассивные связи вводят в
механизм для повышения его жёсткости,
его нагрузоспособности,
вибростойкости, износостойкости.
Вредные связи приводят к
нежелательным трениям. Они могут
вызвать дополнительные затраты
энергии, закручивание и изгиб звеньев
34) ОТВЕТ: Качественные
показатели зубчатого зацепления:
1. Коэффициент перекрытия.
Характеризует плавность,
бесшумность работы передачи,
очерёдность смены пар зубьев. Для
обеспечения плавной бесшумной
работы механизма необходимо,
чтобы каждая последующая пара
зубьев входила в зацепление раньше,
чем из зацепления выйдет
предыдущая пара зубьев.
Положительное смещение исходного
контура приводит к уменьшению
коэффициента перекрытия.
2. Геометрический коэффициент
удельного скольжения.
Характеризует износостойкость
профилей зубьев. Суммарное
положительное смещение исходных
контуров приводит к уменьшению
коэффициентов удельного
скольжения, т.е. к повышению
износостойкости профилей зубьев.
3. Геометрически коэффициент
удельного давления. Характеризует
контактную прочность. Суммарное
положительное смещение исходных
контуров приводит к уменьшению
коэффициента удельного давления, то
есть приводит к повышению
контактной прочности.
4. Коэффициент формы зубы.
Характеризует изгибную прочность.
Положительное смещение приводит к
повышению изгибной прочности.
33) теорему Жуковского: если
какой-либо механизм под действием
системы сил, находится в состоянии
равновесия, то повёрнутый на 90 в
какую-либо сторону план скоростей,
рассматриваемый как твёрдое тело,
вращающееся вокруг полюса плана и
нагруженное теми же силами,
приложенными в соответствующие
точки плана, также находится в
равновесии.
Теорему Жуковского
можно применить и к системе, не
находящейся в равновесии. Для этого
достаточно, кроме действующих сил
приложить и силы инерции.
37) Станочным называют зацепление
нарезаемого колеса и инструмента
В станочном зацеплении начальная
окружность всегда совпадает с
делительной окружностью, т.к.
необходимо перенести с инструмента
стандартные параметры: шаг р,
модуль m и угол профиля .По
отношению к делительной
окружности заготовки, делительная
прямая может занимать следующие
положения:
инструмент отодвигается от центра
заготовки и между делительной
окружностью заготовки и
делительной прямой инструмента
имеет место смещение х
.
m, где х –
коэффициент смещения инструмента,
который имеет знак.
1)В рассматриваемом случае x>0,
xm>0 – нарезается положительное
зубчатое колесо.
Прямая инструмента, касательная к
делительной окружности заготовки –
станочно-начальная прямая.
2)делительная прямая инструмента
является станочно-начальной прямой,
т.е. касается делительной
окружности. х=0, хm=0 – нулевое
зубчатое колесо.
3)при смещении инструмента к центру
заготовки, между делительной прямой
и делительной окружностью смещение
xm<0, x<0 – отрицательное зубчатое
колесо
38) В зависимости от способа
формообразования различают два
метода нарезания зубчатых колес:
метод копирования и метод обката.
1)При нарезании колеса по методу
копирования геометрия инструмента
переносится (копируется) на
заготовку. Инструмент – модульные
дисковые или пальцевые фрезы Но
погрешности формы зуба
нарезаемого колеса и, как следствие,
снижению качества передачи.
Метод отличается высокой
производительностью, но низкой
точностью изготавливаемых колес.
2)Для изготовления колес высокой
точности используется метод обката.
Профиль зуба колеса, нарезаемого по
методу обката, формируется как
огибающая ряда последовательных
положений профиля зуба
инструмента, в качестве которого
применяют инструментальную рейку,
долбяк, червячную фрезуМетод
универсальный, обеспечивает
высокую точность, но имеет низкую
производительность.
42) Коэффициент перекрытия ()
используется для оценки плавности
работы передачи. Он показывает,
сколько пар зубьев может
одновременно находиться в
зацеплении
Рекомендуемая минимальная величина
коэффициента перекрытия для силовых
передач 1,2, а для кинематических 1,1.
Один из способов увеличения
плавности работы передачи
(величины ) – смещение инструмента
в станочном зацеплении при
нарезании колес по методу обката
43) Коэффициент относительного
скольжения используется для
сравнения передач по
износостойкости.
Свидетельствуют о том, что ножка
зуба колеса изнашивается более
интенсивно, чем головка. Износ по
высоте зуба можно выравнить
подбором рациональных значений
коэффициентов смещения.
44) Коэффициент удельного
давления () используется для
сравнения зубчатых передач по
контактной прочности,
29)Расчет сил инерции методом
теоретической механики
При поступательном движении звена
главный вектор сил инерции
определяется как произведение массы
тела на его ускорение . Направлен
вектор в сторону, противоположную
ускорению (рис. 4.2а)
P=as*m
.
(4.2P=a*m
При вращении звена вокруг
неподвижной оси, проходящей через
его центр масс (рис. 4.2б), главный
вектор сил инерции равен нулю, а
главный момент сил инерции
определяется по формуле
M=эпсило*J
, (4.3)
где − угловое ускорение звена; −
момент инерции звена относительно
центра масс.
При плоскопараллельном
движении звена главный вектор и
главный момент сил инерции
определяются по формулам:
P=as*m, M=эпсило*J ,
(4.4)
где − ускорение центра масс звена.
При вращении звена вокруг оси, не
проходящей через центр масс,
главный вектор и главный момент сил
инерции определяются по формулам
(4.4).
Рис. 5.7