Шаманова С.И. Электропривод
Подождите немного. Документ загружается.

радиус приведения кинематической схемы между исполнительным
органом (крюком 10) и валом двигателя.
Для определения приведённого момента нагрузки
М
с
составим
уравнение баланса мощности нагрузки электропривода в реальной и
расчётной схемах. При подъёме груза для поступательного движения
.
vgm
M
vF
M
ио
c
иоио
c
или
η
=Ω
η
=Ω
Для вращательного движения
.
М
M
иоио
c
η
Ω
=Ω
Если эти выражения разделить на Ω, то приведённый момент нагрузки
,
i
MM
M
Fvgm
M
иоиоио
c
иоио
c
и
η
=
Ωη
Ω
=
η
ρ
=
Ωη
=
где g – ускорение силы тяжести; F
ио
– усилие, развиваемое
исполнительным органом;
η = η
р
η
б
– результирующий КПД
кинематической схемы электропривода;
η
р
– КПД редуктора 4; η
б
– КПД
барабана 8;
М
ио
и Ω
ио
– момент нагрузки и скорость исполнительного
органа.
Приведённый момент нагрузки
М
с
также называется статическим
моментом или моментом сопротивления. Тогда уравнение моментов
.
dt
dJ
MM
c
Ω
=±±
Если направление момента совпадает с направлением скорости, то
такой момент считается положительный, и наоборот. Обычно двигатель
создаёт движущий момент, а исполнительный орган – момент
сопротивления движению. Тогда
.
dt
dJ
MM
c
Ω
=−
Левая часть этого уравнения в теории электропривода получила
название
динамического момента М
дин
. Он представляет собой разность
моментов двигателя и нагрузки и определяет условия ускорения или
замедления движения
М
дин
= М – М
с
.
10
Неустановившееся движение электропривода при М
дин
= const
Этот режим возникает, когда динамический момент не равен нулю
М
дин
≠ 0, и происходит увеличение или снижение скорости (пуск,
торможение, реверс, регулирование скорости или нагрузки).
Неустановившееся движение называют также
переходным процессом или
переходным режимом электропривода.
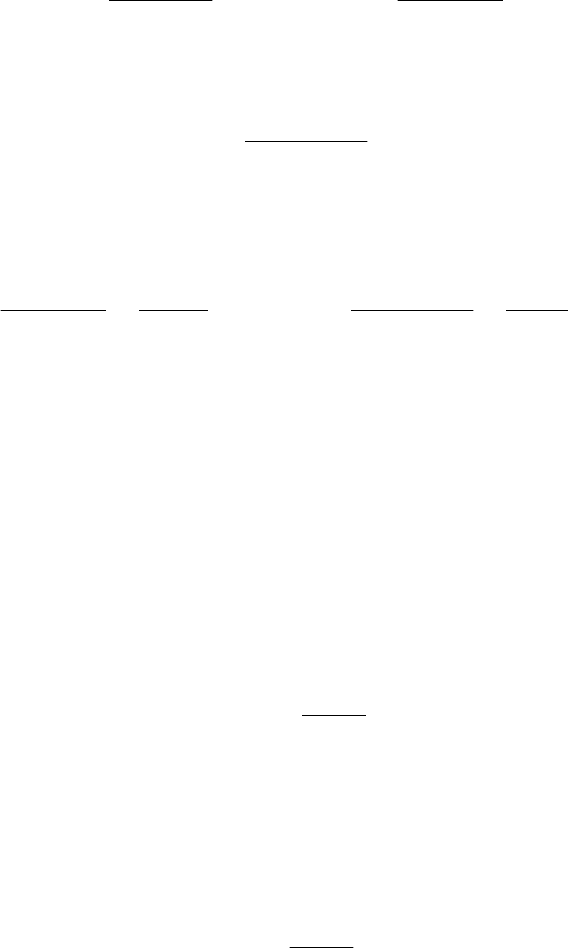
Рассмотрим механический переходный процесс для получения его
параметров в зависимости от времени. Для этого необходимо решить
дифференциальное уравнение движения
М – М
с
= J dΩ /dt с учётом
выражения
Ω = dφ / dt, связывающего угол поворота вала двигателя φ с
его скоростью
Ω. При этом являются заданными начальные (нулевые)
значения переменных, массы и моменты инерции движущихся элементов
не изменяются, а моменты двигателя
М и нагрузки электропривода М
с
являются постоянными величинами (рис. 2.2 а). Тогда и динамический
момент тоже постоянен. Уравнение движения
М = М
с
+ J dΩ /dt решается
методом разделения переменных и решение имеет вид:
.C
J
t)MM(
c
+
−
=Ω
М
с
М
0
М
дин
М
Ω
0
Ω
М
0
t
Ω
кон
t
пп
Ω(t)
M(t)
Ω
нач
М
дин
М
0
Ω
М
t t
пп
Ω
нач
Ω
кон
а)
М
с
М
M(t)
Ω(t)
б)
Рис. 2.2. Пе
р
еходный п
р
оцесс п
р
и М
дин
= cons
t
11
C учётом начальных условий при t = 0: Ω = Ω
нач
, C = Ω
нач
,
.
J
t)MM(
нач
c
Ω+
−
=Ω
Из последнего уравнения время переходного процесса t
пп
.
ММ
)(J
t
с
начкон
пп
−
Ω
−
Ω
=
Скорость Ω зависит от времени линейно: при М
дин
> 0 скорость
увеличивается (рис.15.2 а), а при
М
дин
< 0 уменьшается (рис.15.2 б).
Момент двигателя от скорости не зависит.
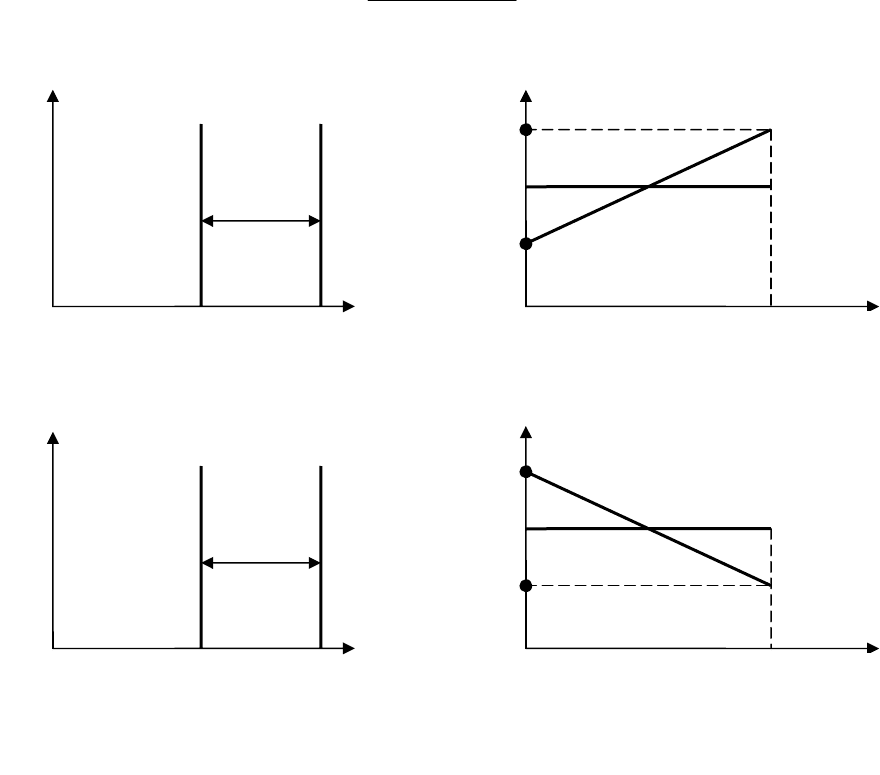
Неустановившееся движение электропривода при линейных
механических характеристиках двигателя и исполнительного органа
При линейных механических характеристиках двигателя
М (рис. 2.3
а, характеристика 1) и исполнительного органа
М
с
(рис. 2.3 а,
характеристика 2) динамический момент также линейно зависит от
скорости. Тогда
М = М
КЗ
– β Ω;
М
с
= М
с0
+ β
с
Ω;
Рис. 2.3. Переходной процесс при линейной характеристике
динамического момента
1
Т
м
Т
м
Ω
нач
Ω
уст
Ω
Ω
2
М
Ω
0
0 0
Ω
у
ст
Ω
нач
М
нач
0,05 Ω
у
ст
3
М
уст
4
М
с0
М
уст
М
КЗ
t
М
нач
t = 3Т
м
а
)
б
)
12
где М
КЗ
и М
с0
– моменты двигателя и исполнительного органа при
нулевой скорости. Подставляя эти выражения в уравнение движения
,
dt
dJ
MM
c
Ω
=−
получим
,
dt
d
JMM
с0сЗК
Ω
=Ωβ−−Ωβ−
откуда
c
0cКЗ
c
MM
dt
dJ
β+β
−
=Ω+
Ω
β+β
или
,
dt
d
T
устм
Ω=Ω+
Ω
где Т
м
= J / (β + β
с
) – электромеханическая постоянная времени, Ω
уст
=
(М
КЗ
– М
с0
) / (β + β
с
) – установившаяся скорость, соответствующая
точке пересечения характеристик двигателя и исполнительного органа.
Решение этого уравнения имеет вид
Ω(t) = A
м
T
t
e
−
+ Ω
уст
,
где постоянный коэффициент
A определяется из начальных условий
переходного процесса при
t = 0 и Ω = Ω
нач
, то есть A = Ω
нач
– Ω
уст
.
Тогда изменение скорости от времени
Ω(t) = (Ω
нач
– Ω
уст
)
м
T
t
e
−
+ Ω
уст.
Логарифмируя это выражение, можно получить время переходного
процесса
t
пп
- за которое скорость двигателя изменится от некоторого
начального значения
Ω
нач
до конечного Ω
кон
.lnTt
конуст
начуст
Mпп
Ω−Ω
Ω
−
Ω
=
13
Время достижения установившегося значения в переходном
процессе является бесконечно большим. Поэтому в технических расчётах
принимают
t
пп
= 3Т
М
.
Изменение момента от времени
М(t) = М
КЗ
– β Ω(t).
Так как (рис. 2.3 а)
,
MM
MM
M
d
dM
нач
начКЗ
уст
устКЗ
0
КЗ
Ω
−
=
Ω
−
=
Ω
=
Ω
=β
то после подстановки Ω
нач
и Ω
уст
получим
М(t) = (М
нач
– М
уст
)
м
T
t
-
e + М
уст.
Если момент сопротивления М
с
является постоянной величиной, то
β
с
= 0 и
.
MМ
;
M
J
J
T
0КЗ
уст
КЗ
0
м
β
−
=Ω
Ω
=
β
=
Анализ переходного процесса показывает, что скорость и момент
двигателя изменяются по экспоненциальному закону с постоянной
времени
Т
м
. На рис. 2.3 а показаны статические механические
характеристики двигателя и приведенного момента сопротивления, а на
рис. 2.3 б графики переходного процесса разбега
Ω(t) – кривая 3 и М(t) –
кривая 4 при увеличении скорости от Ω
нач
до Ω
уст
Постоянная времени
Т
м
имеет графический и физический смысл.
Это время разгона двигателя без нагрузки из неподвижного состояния до
скорости идеального холостого хода
Ω
0
под действием пускового момента
M
КЗ
. Действительно, при М
с
= 0, Ω
нач
= 0 и Ω
уст
= Ω
0
.T
M
J
t
м
КЗ
0
пп
=
Ω
=
На рис. 2.3, б Т
м
равно отрезку, отсекаемому касательной,
проведённой к кривой переходного процесса в точке
t = 0 на
горизонтальной прямой, соответствующей установившемуся значению
скорости или момента.
14
Лекция 3
Регулирование координат электропривода
Для обеспечения требуемых режимов работы электропривода
необходимо регулировать его координаты. К ним относятся скорость,
ускорение, положение исполнительного органа, токи в цепях
электродвигателя, моменты на валу и др.
1. Регулирование скорости. Она может регулироваться механическим
способом или электрическим способом. Скорость двигателя и
исполнительного органа связаны соотношениями:
Ω
ио
= Ω / i – для
вращательного движения;
v = Ω ρ – поступательного движения; где i –
передаточное число редуктора;
ρ – радиус приведения механической
передачи при постоянной скорости двигателя.
Таким образом, регулировать скорость можно
механическим способом,
изменяя
i или ρ, а также электрическим способом, воздействуя на ω
двигателя при неизменных параметрах механической передачи.
Механический способ имеет недостатки: малый набор регулируемых
передач, невысокая надёжность и малая экономичность. Поэтому
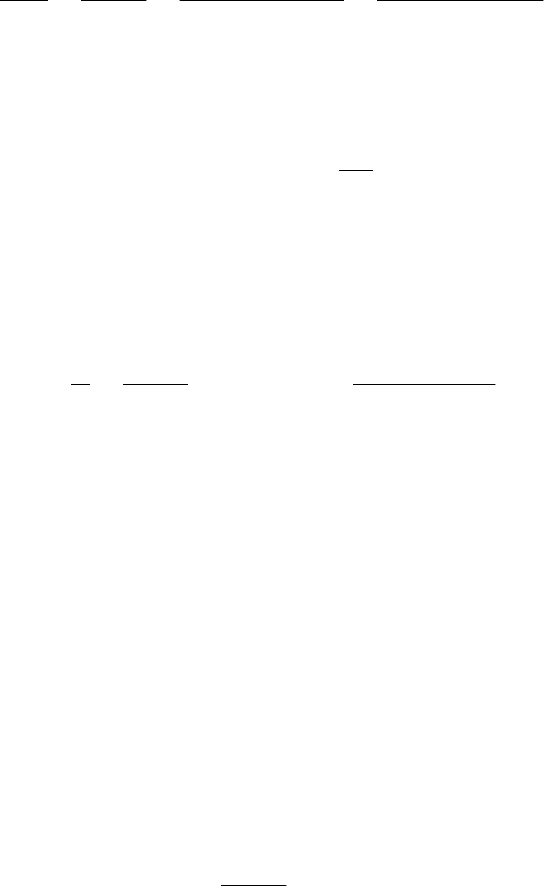
наиболее распространён электрический способ. Например, для двигателя
постоянного тока с независимым возбуждением (рис 3.1) для изменения
Ω
Рис. 3.1. Регулирование скорости двигателя постоянного тока
независимого возбуждения
1 U = U
ном
R
доб
= 0
Ω
ном
Ω
иск 2
4 Ф < Ф
ном
Ω
иск 1
3U < U
ном
2 R
доб
0
М
с
М
15
скорости от Ω
н ест
с естественной характеристики 1 до Ω
иск
можно ввести
добавочное сопротивление в цепь якоря
R
доб
(характеристика 2) или
уменьшить напряжение (характеристика 3).
Регулирование скорости характеризуется следующими параметрами:
• Диапазон регулирования D = Ω
max
/ Ω
min
.
• Стабильность скорости. Она определяется жёсткостью механической
характеристики. На рис. 3.1 характеристика 3 более жёсткая, чем 2.
• Плавность регулирования скорости. Чем больше в заданном
диапазоне регулирования скорости может быть получено искусственных
характеристик, тем плавнее будет регулирование скорости.
• Направление регулирования: вверх от номинальной (рис. 3.1,
характеристика 4) или вниз (рис. 3.1, характеристики 2 и 3).
• Допустимая нагрузка двигателя. Нагрузка двигателя ограничивается
нагревом, а также сроком, на который рассчитана изоляция. Нагрев
пропорционален
I
2
r . Таким образом, чтобы двигатель не нагревался, он
не может работать с током
I > I
ном
. Такая нагрузка и называется
допустимой. Она может быть равна номинальному моменту
М
ном
либо
номинальной мощности P
ном
.
• Экономичность регулирования. Она зависит как от потерь в процессе
регулирования, так и затрат на оборудование.
2.
Регулирование момента и тока. Регулирование момента и тока
может осуществляться только в динамическом (переходном) режиме
работы электропривода, так как в установившемся (статическом) режиме
ток
I
a
и момент двигателя M определяются его нагрузкой. Допустим, при
пуске необходимо ограничить пусковой ток
I
a пуск
= 2,5 I
a ном
или момент
М для предотвращения поломки рабочей машины в момент пуска. Если
регулировать
I
a
, то момент тоже регулируется M= k I
a
Ф.
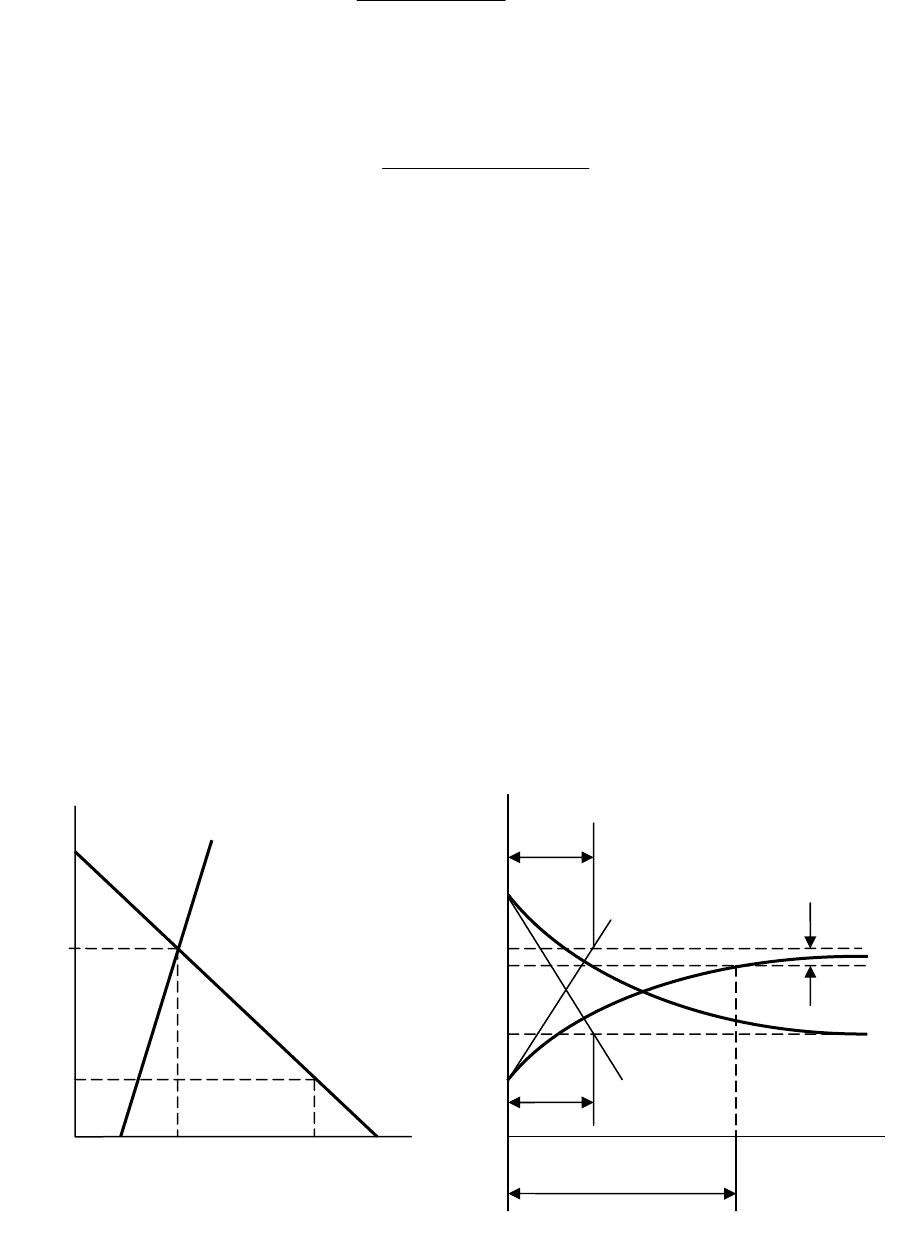
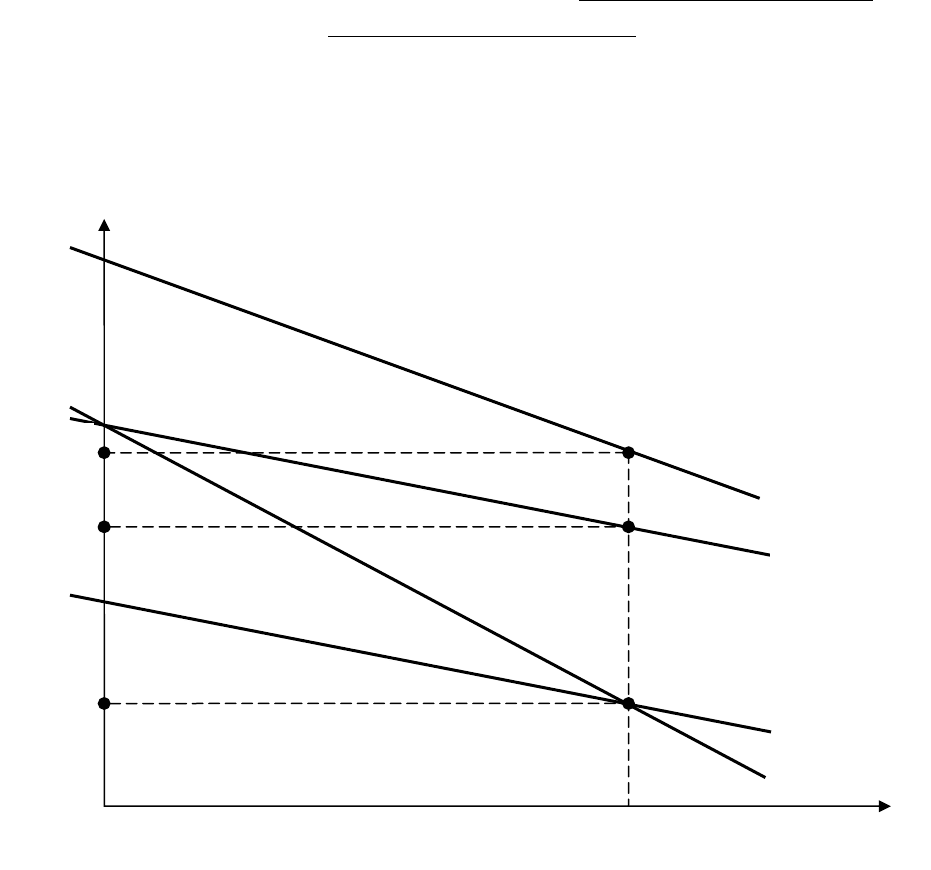
Для анализа возможности регулирования тока используется
электромеханическая характеристика (скоростная характеристика),
которая представляет зависимость
Ω(I). На рис. 3.2 а регулирование тока и
момента производится ступенчато в пределах
I
1
– I
2
и M
1
– M
2
с помощью
R
доб
. Этот способ регулирования называется параметрическим, является
простым, но характеризуется невысокой точностью, даже если увеличить
число добавочных сопротивлений. Применяется в разомкнутых системах
электропривода.
Высокая точность регулирования тока и момента при пуске
достигается в замкнутых системах электропривода, где кривая 3 отсечки
по току на рис. 3.2 б является почти вертикальной.
16
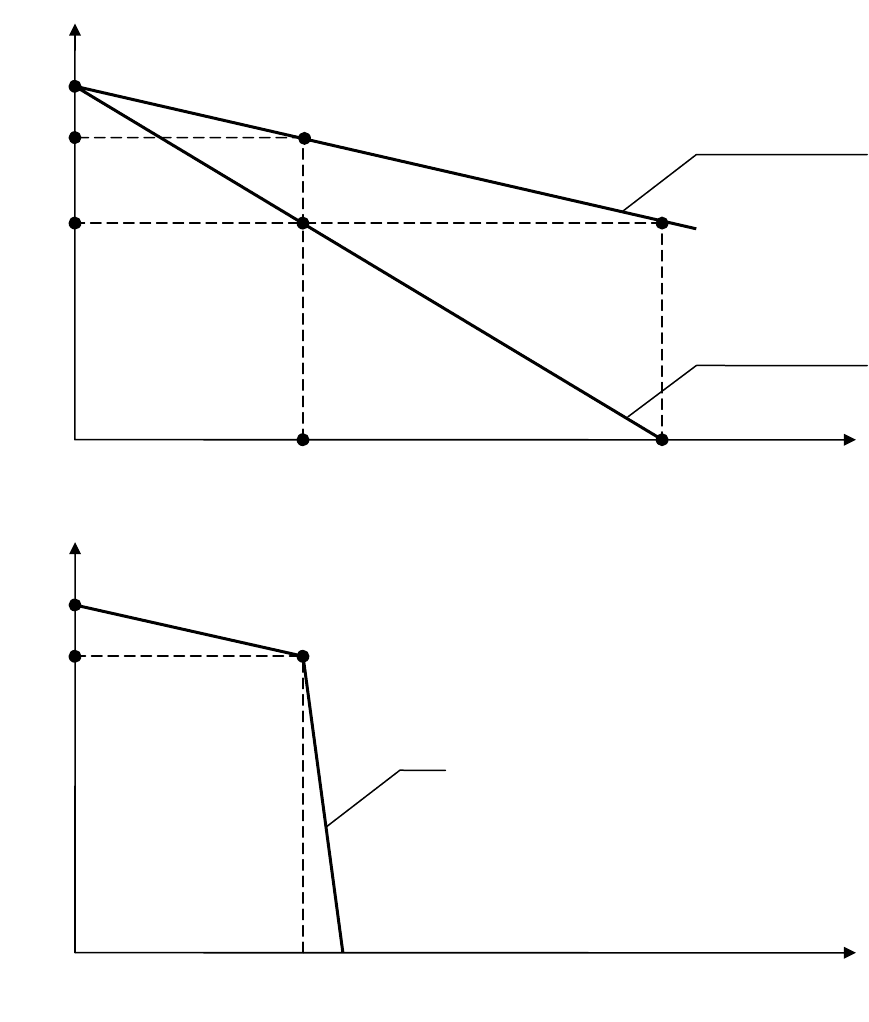
Рис. 3.2. Регулирование тока и момента двигателя постоянного тока
независимого возбуждения
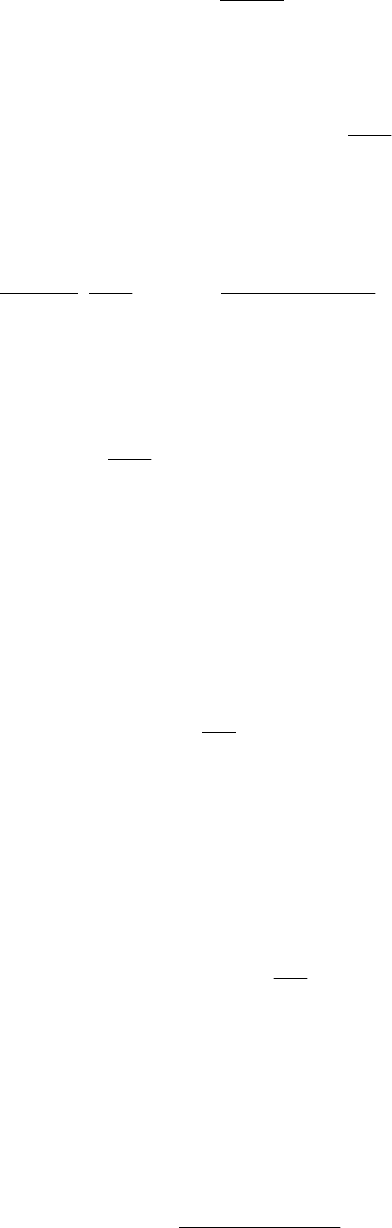
3. Регулирование положения. Перемещение органа рабочего
механизма из одной точки в другую называется
позиционированием. Это
обеспечивается с помощью
регулирования положения вала двигателя.
При невысокой точности позиционирования используются путевые или
конечные выключатели. Они устанавливаются в заданных позициях и при
подходе к ним исполнительного механизма производят отключение
электропривода. Происходит торможение и остановка с некоторой
точностью. Для более точного позиционирования применяются замкнутые
системы электропривода. На рис. 3.3 приведены кривые изменения
0
Ω
1
M, I
Ω
2
M
1
, I
1
M
2
, I
2
Ω
0
Ω
Ω
M, I
1. R
доб
= 0
2. R
доб
≠ 0
а)
Ω
0
Ω
1
3
0
б)
17
момента M(t), скорости Ω(t) и график движения электропривода φ(t) при
разгоне, устойчивом режиме работы и торможении электропривода.
Рис. 3.3. Регулирование движения электропривода
Классификация электропривода при регулировании
координат
Все электроприводы делятся на
неавтоматизированные и
автоматизированные
(рис. 3.4). Неавтоматизированным электроприводом
обычно управляет человек, производящий пуск, торможение, реверс,
изменение скорости в соответствии с заданным технологическим циклом.
В автоматизированном электроприводе всё это выполняет система
управления.
Автоматизированный электропривод подразделяется на
разомкнутый и замкнутый. Разомкнутый электропривод
характеризуются тем, что внешние возмущения влияют на его выходную
координату (например, скорость). Они просты и используются там, где не
требуется высокое качество управления. Например, при пуске, реверсе и
торможении.
φ
кон
Торможение
M
Ω
φ
M(t)
Ω(t)
φ(t)
M(t)
t
Разгон
Установившийся
0
режим
18
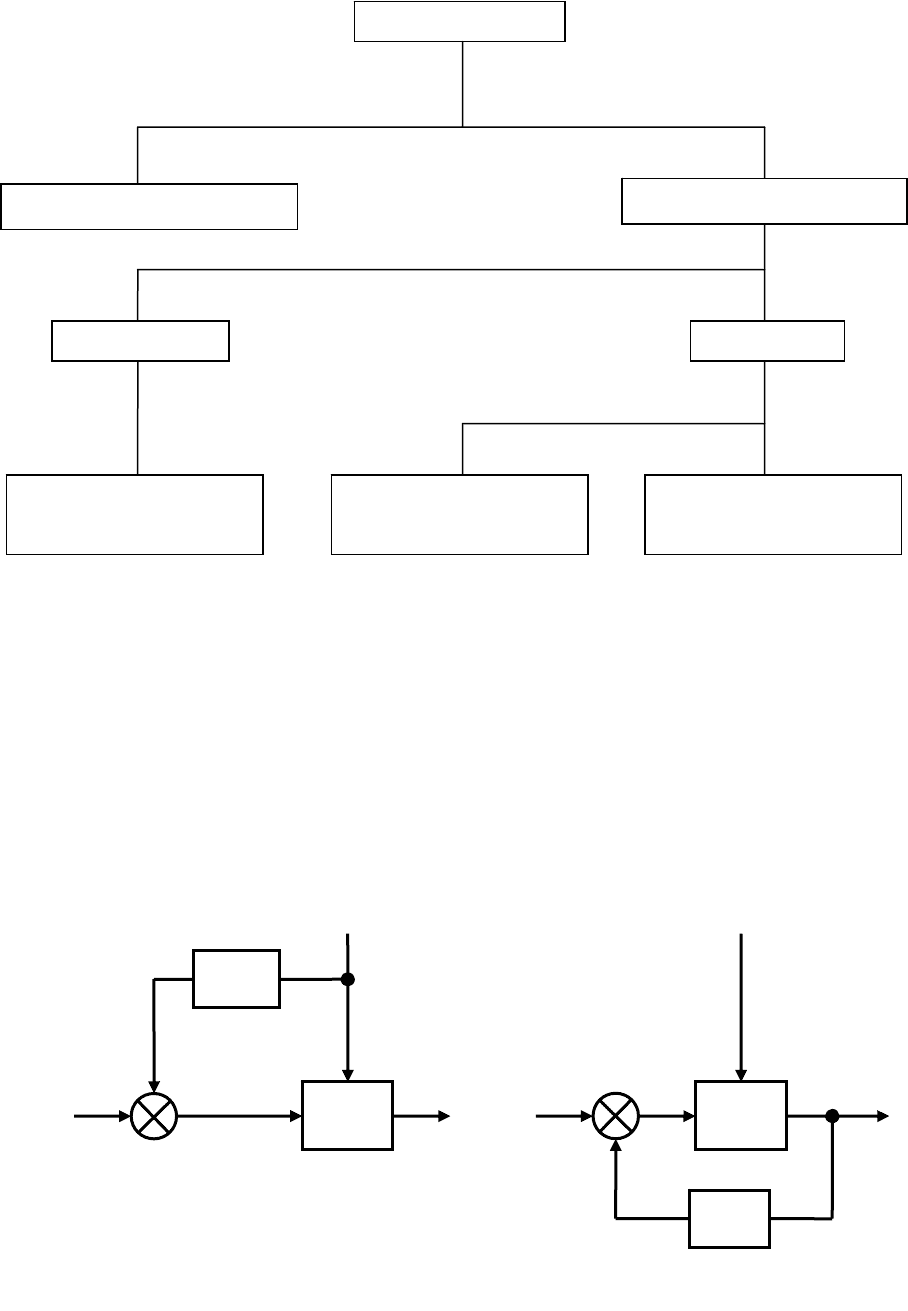
Электропривод
Автоматизированный
Неавтоматизированный
Разомкнутый Замкнутый
С регулированием С регулированием С комбинированным
по возмущению по отклонению регулированием
Рис. 3.4. Классификация электроприводов
Замкнутые системы применяются тогда, когда требуется высокая
точность управления, большой диапазон регулирования, экономичность и
оптимальная работа системы. Автоматизированный электропривод
строится либо по принципу
компенсации возмущающего воздействия
(рис. 3.5 а), либо по принципу
отклонения или принципу обратной связи
(рис. 3.5 б).
Рис. 3.5. Функциональные схемы автоматизированных электроприводов
U
∆
– U
ОС
U
М
k
М
U
зс
ЭП
Ω
U
∆
U
зс
М
с
М
с
Ω
ЭП
k
ос
а
)
б
)
19