Richards J.A., Jia X. Remote Sensing Digital Image Analysis: An Introduction
Подождите немного. Документ загружается.

1.4 Spatial Data Sources in General 19
Table 1.2. Some GIS data manipulation operations
used (see Sect. 4.2); however as geometric detail is not preserved in a histogram
this is rarely a suitable code for an image on its own. One effective possibility that
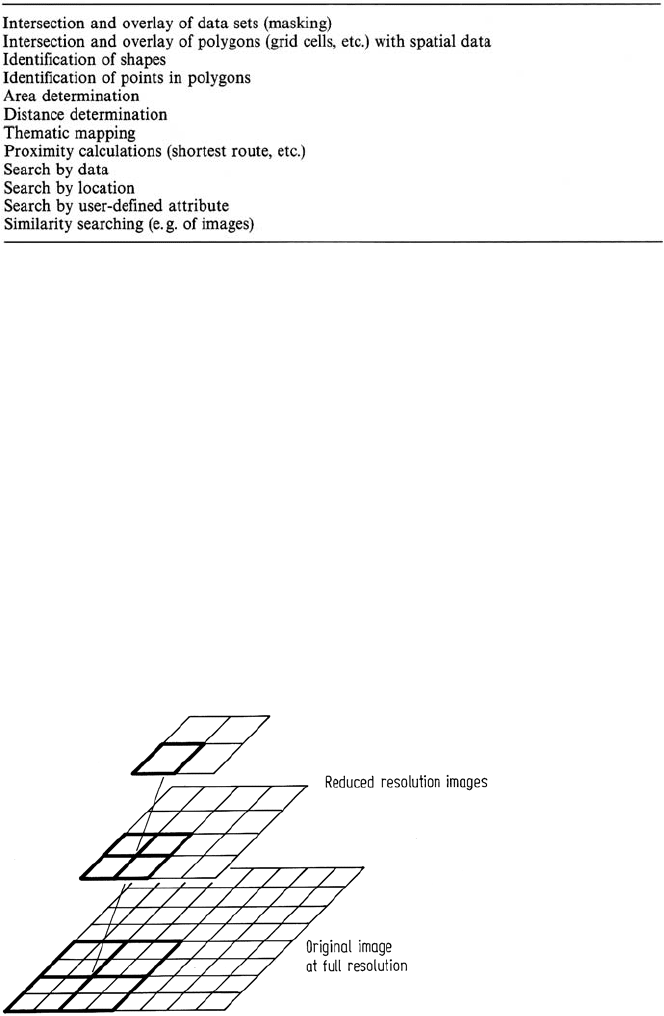
has been explored is the use of image pyramids. A pyramid is created by combining
groups of pixels in a neighbourhood to produce a new composite pixel of reduced
resolution, and thus a low resolution image with fewer pixels. This process is repeated
on the processed image to form a new image of lower resolution (and fewer pixels)
still. Ultimately the image could be reduced to one single pixel that is a global
measure of the image’s brightness. Since pixels are combined in neighbourhood
groups, spatial detail is propagated up through the pyramid, albeit at decreasing
resolution. Figure 1.14 illustrates how an image pyramid is constructed by simple
averaging of non-overlapping sets of 2 × 2 pixels. It is a relatively easy matter
(see Problem 1.6) to show that the additional memory required to store a complete
pyramid, constructed as in the figure, is only 33% more than that required to store
just the image itself.
Fig. 1.14. Construction of an image pyramid by successively averaging groups of 2 ×2 pixels
20 1 Sources and Characteristics of Remote Sensing Image Data
Having developed an image pyramid, signatures that can be used to undertake
similarity searching include the histograms computed over rows and columns in the
uppermost levels of the pyramid (see Problem 1.7). A little thought shows that this
allows an enormous number of images to be addressed, particularly if each pixel is
represented by an 8 bit brightness value.As a result very fast searching can be carried
out on these reduced representations of images.
Image pyramids are discussed by Rosenfeld (1982) and have been considered in
the light of image similarity searching by Chien (1980), and data mining by Datcu
et al. (2003).
There is sometimes an image processing advantage to be obtained when using a
pyramid representation of an image. In edge detection, for example, it is possible to
localise edges quickly, without having to search every pixel of an image, by finding
apparent edges (regions) in the upper levels of the pyramid. The succeeding lower
pixel groupings are then searched to localise the edges better.
Finally the pyramid representation of an image is felt to have some relation
to human perception of images. The upper levels contain global features and are
therefore not unlike the picture we have when first looking at a scene – generally
we take the scene in initially “as a whole" and either miss or ignore detail. Then
we focus on regions of interest for which we pay attention to detail because of the
information it provides us with.
1.4.4
The Challenge to Image Processing and Analysis
Much of the experience gained with digital image processing and analysis in remote
sensing has been with multispectral image data. In principle however any spatial data
type in digital format can be processed using the techniques and procedures presented
in this book. Information extraction from geophysical data could be facilitated, for
example, if a degree of sharpening is applied prior to photointerpretation, while
colour density slicing could assist the interpretation of topography. However the real
challenge to the image analyst arises when data of mixed types are to be processed
together. Several issues warrant comment.
The first relates to differences in resolution, an issue that arises also when treating
multi-source satellite data such as Landsat ETM+ and Aqua MODIS. The analyst
must decide, for example what common pixel size will be used when co-registering
the data, since either resolution or coverage will normally be sacrificed. Clearly this
decision will be based on the needs of a particular application and is a challenge
more to the analyst than the algorithms.
The more important consideration however is in relation to techniques for ma-
chine assisted interpretation. There is little doubt that combined multispectral and,
say, topographic or land ownership maps can yield more precise thematic (i.e. cat-
egory of land cover, etc.) information for a particular region than the multispectral
data on its own. Indeed the combination of these sources is often employed in pho-
tointerpretive studies.
1.5 A Comparison of Scales in Digital Image Data 21
The issue is complicated further when it is recalled that much of the non-spectral,
spatial data available is not in numerical point form but rather is in nominal area or
line format. With these, image analysis algorithms developed algebraically will not be
suitable. Rather same degree of logical processing of labels combined with algebraic
processing of arithmetic values (such as pixel brightnesses) is necessary.
Chapter 12 addresses this issue by considering several numerical and knowledge-
based image analysis methods, which lend themselves to handling both numerical
and non-numerical data sources.
1.5
A Comparison of Scales in Digital Image Data
Because of IFOV differences the digital images provided by various remote sensing
sensors will find application at different scales. As a guide Table 1.3 relates scale
to spatial resolution; this has been derived somewhat simplistically by considering
an image pixel to be too coarse if it approaches 0.1 mm in size on a photographic
product at a given scale. Thus Landsat MSS data is suggested as being suitable for
scales smaller than about 1 : 500,000 whereas NOAA AVHRR data is suitable for
scales below 1 : 10,000,000. Detailed discussions of image quality in relation to scale
will be found in Welch (1982), Forster (1985), Woodcock and Strahler (1987) and
Light (1990).
Table 1.3. Suggested maximum scales of photographic products as a function of effective
ground pixel size (based on 0.1 mm printed pixel)
Scale Approx. Pixel Size (m) Sensor (nominal)
1 : 10,000 1 Ikonos panchromatic
1 : 50,000 5 aircraft MSS, Ikonos XS
1 : 100,000 10 Spot HRG
1 : 250,000 25 Spot HRVIR, Landsat TM
1 : 500,000 50 Landsat TM, LISS
1 : 5,000,000 500 OCTS, OCM
1 : 10,000,000 1000 NOAA AVHRR, MODIS
1 : 50,000,000 5000 GMS thermal IR band
22 1 Sources and Characteristics of Remote Sensing Image Data
References for Chapter 1
More details on satellite programs, along with information on sensors and data characteristics
can be found in the web sites of the responsible agencies. Some of particular use are:
For weather satellites
http://www.wmo.ch
http://www.ncdc.noaa.gov
http://www.eumetsat.de
For earth observation satellites
http://www.nasa.gov
http://www.orbimage.com
http://hdsn.eoc.nasda.go.jp
http://www.spotimage.fr
http://www.spaceimaging.com
http://earth.esa.int
http://www.isro.org
For radar missions
http://www.rsi.ca
http://southport.jpl.nasa.gov
For imaging spectrameters
http://www.techexpo.com/WWW/opto-knowledge/
The Manual of Remote Sensing (1999) provides an excellent and comprehensive coverage of
the field of remote sensing, and spectral reflectance characteristics in particular.
Cloude et al. (1998) gives a contemporary account of interferometric synthetic aperture radar
and its application to topograhic mapping.
R. Bolstad, 2002: GIS Fundamentals: A First Text on Geographical Information Systems,
Eider.
M.T. Chahine, 1983: Interaction Mechanisms within the Atmosphere. In Manual of Remote
Sensing, R.N. Colwell (Ed). 2e. American Society of Photogrammetry, Falls Church, Va.
Y.T. Chien, 1980: Hierarchical Data Structures for Picture Storage, Retrieval and Classification.
In Pictorial Informations Systems, S.K. Chang and K.S. Fu (Eds.), Springer-Verlag, Berlin.
S.R. Cloude and K.P. Papathanassiou, 1998: Polarimetric SAR Interferometry. IEEE Trans.
Geoscience and Remote Sensing, 36, 1551–1565.
M. Datcu, H. Daschiel, A. Pelizzari, M. Quartulli, A. Galoppo, A. Colapicchioni, M. Pastori,
K. Seidel, P. Marchetti and S. D’Elia, 2003: Information Mining in Remote Sensing Image
Archives. IEEE Trans. Geoscience and Remote Sensing, 41, 2923–2936.
C. Elachi (Chairman), 1983: Spaceborne Imaging Radar Symposium. Jet Propulsion Labora-
tory, January 17–20. JPL Publication 83–11.
C. Elachi, T. Bicknell, R.L. Jordan and C. Wu, 1982: Spaceborne Synthetic Aperture Imaging
Radars. Applications, Techniques and Technology. Proc. IEEE, 70, 1174–1209.
Problems 23
C. Elachi, 1988: Spaceborne Radar Remote Sensing:Applications and Techniques. N.Y., IEEE.
B.C. Forster, 1985: Mapping Potential of Future Spaceborne Remote Sensing Systems. Insti-
tution of Surveyors (Australia) Annual Congress, Alice Springs.
R.M. Hoffer, 1978: Biological and Physical Considerations in Applying Computer-Aided
Analysis Techniques to Remote Sensor Data. In P.H. Swain and S.M. Davis, Eds., Remote
Sensing: The Quantitative Approach, N.Y., McGraw-Hill.
D.L. Light, 1990: Characteristics of Remote Sensors for Mapping and Earth Science Appli-
cations. Photogrammetric Engineering and Remote Sensing, 56, 1613–1623.
Manual of Remote Sensing, Remote Sensing for the Earth Sciences, 1999. A.N. Renez and
R.A Ryerson (Eds.), 3rd ed., NY, Wiley.
A. Rosenfeld, 1982: Quadtrees and Pyramids: Hierarchical Representation of Images, Report
TR-1171, Computer Vision Laboratory, University of Maryland.
K. Tomiyasu, 1978: Tutorial Review of Synthetic-Aperture Radar (SAR) with Applications to
Imaging of the Ocean Surface. Proc. IEEE, 66, 563–583.
R. Welch, 1982: Image Quality Requirements for Mapping from Satellite Data. Proc. Int.
Soc. Photogrammetry and Remote Sensing, Commission 1. Primary Data Acquisition,
Canberra.
F.T. Ulaby, R.K. Moore and A.K. Fung, 1981, 1982, 1985: Microwave Remote Sensing, Active
and Passive. Vols. 1,2,3 Reading Mass. Addison-Wesley.
C.E. Woodcock and A.H. Strahler, 1987: The Factor of Scale in Remote Sensing. Remote
Sensing of Environment, 21, 311–332.
H.A. Zebker and R.M. Goldstein, 1986: Topogaphic Mapping from Interferometric Synthetic
Aperture Radar Observations. J. Geophysical Research, 91, 4993–4999.
Problems
1.1 Plot graphs of pixel size in equivalent ground metres as a function of angle from nadir
across a swath for
a) Landsat MSS with IFOV of 0.086 mrad, FOV = 11.56
◦
,
b) NOAA AVHRR with IFOV = 1.3 mrad, FOV = 2700 km, altitude = 833 km,
c) an aircraft scanner with IFOV = 2.5 mrad, FOV = 80
◦
flying at 1000 m AGL (above ground
level),
producing separate graphs for the along track and across track dimensions of the pixel. Replot
the graphs to indicate pixel size relative to that at nadir.
1.2 Imagine you have available image data from a multispectral scanner that has two narrow
spectral bands. One is centred on 0.65 µm and the other on 1.0 µm wavelength. Suppose the
corresponding region on the earth’s surface consists of water, vegetation and soil.
Construct a graph with two axes, one representing the brightness of a pixel in the 0.65 µm
band and the other representing the brightness of the pixel in the 1.0 µm band. In this show
where you would expect to find vegetation pixels, soil pixels and water pixels. Note how
straight lines could, in principle, be drawn between the three groups of pixels so that if a
computer had the equations of these lines stored in its memory it could use them to identify
every pixel in the image.
Repeat the exercise for a scanner with bands centred on 0.95 µm and 1.05 µm.
1.3 There are 460 185 km × 185 km frames of Landsat data that cover Australia. Compute
the daily data rate (in Gbit/day) for Australia provided by the ETM+ sensor on Landsat 7,
assuming all possible scenes are recorded.
24 1 Sources and Characteristics of Remote Sensing Image Data
1.4 Assume a “frame" of image data consists of a segment along the track of the satellite,
as long as the swath is wide. Compute the data volume of a single frame from each of the
following sensors and produce a graph of average data volume per wavelength band versus
pixel size.
NOAA AVHRR
Aqua MODIS
ADEOS AVNIR (multispectral)
Landsat ETM+
Spot HRG (multispectral)
1.5 Determine a relationship between swath width and orbital repeat cycle for a polar orbiting
satellite at an attitude of 800 km, assuming that adjacent swaths overlap by 10% at the equator.
1.6 An image pyramid is to be constructed in the following manner: Groups of 2 × 2 pixels
are averaged to form single pixels and thereby reduce the number of pixels in the image by
a factor of 4, while reducing its resolution as well. Groups of 2 × 2 pixels in the reduced
resolution image are then averaged to form a third version of lower resolution still. This
process can be continued until the original image is represented by a pyramid of progressively
lower resolution images with a single pixel at the top.
Determine the additional memory required to store the complete pyramid by comparison
to storing just the image itself. (Hint: Use the properties of a geometric progression.)
Repeat the exercise for the case of a pyramid built by averaging 3 ×3 groups of pixels.
1.7 A particular image data base is to be constructed to allow similarity searching to be
performed on sets of binary images i.e. on images in which pixels take on brightness values
of 0 or 1 only. Image pyramids are to be stored in the data base where each succeeding higher
level in a pyramid has pixels derived from 3 × 3 groups in the immediately lower level. The
value of the pixel in the higher level is to be that of the majority of pixels in the corresponding
lower group. The uppermost level in the pyramid is a 3 × 3 image.
(i) How much additional storage is required to store the pyramids rather than just the
original images?
(ii) The search algorithm to be implemented on the top level of the pyramid is to consist
of histogram comparison. In this histograms are taken of the pixels along each row and
down each column and a pair of images are ‘matched’ when all of these histograms
are the same for both images. In principle, how many distinct images can be addressed
using the top level only?
(iii) An alternative search algorithm to that mentioned in (ii) is to compute just the simple
histogram of all the pixels in the top level of the pyramid. How many distinct images
could be addressed in this case using the top level only?
(iv) Would you recommend storing the complete pyramid for each image or just the original
image plus histogram information for the upper levels of a pyramid?
(v) An alternative means by which the upper levels of the pyramid could be coded is simply
by counting and storing the fraction of 1’s which occurs in each of the first few upper-
most levels. Suppose this is done for the top three levels. Show how a feature or pattern
space could be constructed for the complete image data base, using the 1’s fractions for
the upper levels in each image, which can then be analysed and searched using pattern
classification procedures.
1.8 A particular satellite carries a high resolution optical sensor with 1 m spatial resolution
and is at 800 km altitude in a near polar orbit. Orbital period is related to orbital radius by:

Problems 25
T = 2π
r
3
µ
where µ = 3.986 × 10
14
m
3
s
−2
, and orbital radius is given by
r = a + h
in which a = 6.378 Mm and h is altitude.
If the orbit is arranged such that complete earth coverage is possible, how long will that
take if there are 2048 pixels per swath? Consequently, what sorts of applications would such
a satellite be used for?
1.9 Suppose a particular sensor recorded reflectance data in just two wavebands. Further,
suppose its radiometric resolution were only 2 bits – i.e. are just four levels of grey available
in each of the two bands. What is the theoretical maximum number of different cover types
that could be discriminated with the sensor – i.e. how many different unique brightness value-
waveband pairs are available? Those pairs are in fact the individually resolvable sites in the
coordinate space discussed in problem 1.2.
Show that if a sensor has c channels and a radiometric resolution of b bits that the total
number of sites in the space is 2
bc
. How many different sites are there for the following
sensors?
Spot HRV
Landsat Thematic Mapper
OrbView2 SeaWiFS
Aqua MODIS
EO-1 Hyperion.
For an image of 512 ×512 pixels how many sites, on the average, will be occupied for each
of the sensors above?
2
Error Correction
and Registration of Image Data
When image data is recorded by sensors on satellites and aircraft it can contain
errors in geometry and in the measured brightness values of the pixels. The latter
are referred to as radiometric errors and can result from the instrumentation used
to record the data, from the wavelength dependence of solar radiation and from the
effect of the atmosphere. Image geometry errors can arise in many ways. The relative
motions of the platform, its scanners and the earth, for example, can lead to errors
of a skewing nature in an image product. Non-idealities in the sensors themselves,
the curvature of the earth and uncontrolled variations in the position and attitude of
the remote sensing platform can all lead to geometric errors of varying degrees of
severity.
When an image is to be utilized it is frequently necessary to make corrections
in brightness and geometry if the accuracy of interpretation, either manually or by
machine, is not to be prejudiced. For many applications only the major sources of
error will require compensation whereas in others more precise correction will be
necessary.
It is the purpose of this chapter to discuss the nature of the radiometric and
geometric errors commonly encountered in remote sensing images and to develop
computational procedures that are used for their compensation. While this is the
principal intention, the procedures to be presented find more general application
as well, such as in registering together sets of images of the same region but at
different times, and in performing operations such as scale changing and zooming
(magnification).
Radiometric correction procedures for hyperspectral imagery are treated sepa-
rately in Chap. 13.
2.1
Sources of Radiometric Distortion
Mechanisms that affect the measured brightness values of the pixels in an image can
lead to two broad types of radiometric distortion. First, the relative distribution of
28 2 Error Correction and Registration of Image Data
brightness over an image in a given band can be different to that in the ground scene.
Secondly, the relative brightness of a single pixel from band to band can be distorted
compared with the spectral reflectance character of the corresponding region on the
ground. Both types can result from the presence of the atmosphere as a transmission
medium through which radiation must travel from its source to the sensors, and can
be a result also of instrumentation effects.
2.1.1
The Effect of the Atmosphere on Radiation
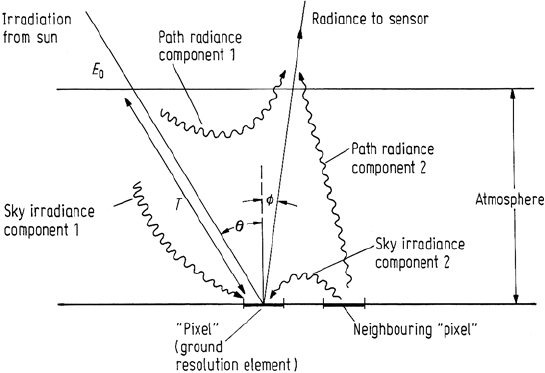
Figure 2.1 depicts the effect the atmosphere has on the measured brightness value
of a single pixel for a passive remote sensing system in which the sun is the source
of energy, as in the visible and reflective infrared regions. In the absence of an
atmosphere the signal measured by the sensor will be a function simply of the level
of energy from the sun, actually incident on the pixel, and the reflectance properties
of the pixel itself. However the presence of the atmosphere can modify the situation
significantly as depicted in the diagram. Before discussing this in detail it is of value
to introduce some definitions of radiometric quantities as these will serve to simplify
explanations and will allow correction equations to be properly formulated.
Imagine the sun as a source of energy emitting at a given rate of Joules per second,
or Watts. This energy radiates through space isotropically in an inverse square law
fashion so that at a given distance the sun’s emission can be measured as Watts per
square metre (given as the power emitted divided by the surface area of a sphere at
that distance). This power density is called irradiance, a property that can be used
to describe the strength of any emitter of electromagnetic energy.
Fig. 2.1. The effect of the atmosphere in determining various paths for energy to illuminate a
(equivalent ground) pixel and to reach the sensor
2.1 Sources of Radiometric Distortion 29
We can measure a level of solar irradiance at the earth’s surface. If the surface is
perfectly diffuse then this amount is scattered uniformly into the upper hemisphere.
The amount of power density scattered in a particular direction is defined by its
density per solid angle, since equal amounts are scattered into equal cones of solid
angle. This quantity is called radiance and has units of Watts per square metre per
steradian (Wm
−2
sr
−1
).
The emission of energy by bodies such as the sun is wavelength dependent, as
seen in Fig. 1.4, so that often the term spectral irradiance is used to describe how
much power density is available incrementally across the wavelength range. Spectral
irradiance is typically measured in Wm
−2
µm
−1
.
As an illustration of how these quantities might be used suppose, in the absence
of atmosphere, the solar spectral irradiance at the earth is E
λ
. If the solar zenith angle
(measured from the normal to the surface) is θ as shown in Fig. 2.1 then the spectral
irradiance (spectral power density) on the earth’s surface is E
λ
cos θ. This gives an
available irradiance between wavelengths λ
1
and λ
2
of
E
os
=
λ
2
λ
1
E
λ
cos θdλ. Wm
−2
In remote sensing the wavebands used (λ = λ
2
−λ
1
) are frequently narrow enough
to assume
E
os
= E
λ
cos θλ Wm
−2
(2.1)
where E
λ
is the average spectral irradiance in the band λ.
Suppose the surface has a reflectance R. This describes what proportion of the
incident energy is reflected. If the surface is diffuse then the radiance scattered into
the upper hemisphere and available for measurement is
L = E
λ
cos θλR/π Wm
−2
sr
−1
(2.2)
where the divisor π accounts for the upper hemisphere of solid angle. Knowing L it
is possible to determine the power detected by a sensor, and the digital count value
(or grey level) given in the digital data product from a particular sensor which is
directly related to the radiance of the scene. If we call the digital value (between 0
and 255 for example) C, then the measured radiance of a particular pixel is
L = Ck + L
min
Wm
−2
sr
−1
(2.3)
where k = (L
max
− L
min
)/C
max
in which L
max
and L
min
are the maximum and
minimum measurable radiances of the sensor. These are usually available from the
sensor manufacturer or operator.
Equation (2.2) relates to the ideal case of no atmosphere. When an atmosphere is
present there are several mechanism that must be taken into account that modify (2.2).
These are a result of scattering and absorption by the particles in the atmosphere.
Absorption by atmospheric molecules is a selective process that converts incom-
ing energy into heat. In particular, molecules of oxygen, carbon dioxide, ozone and
water attenuate the radiation very strongly in certain wavebands. Sensors commonly
used in solid earth and ocean remote sensing are usually designed to operate away