Расчетно-графическая работа на тему информационное обеспечение
Подождите немного. Документ загружается.

Содержание.
1. Введение 3
2. Примеры энкодеров различных серий 5
2.1 Инкрементальный энкодер E30S. 5
2.2 Инкрементальный энкодер серииENA 7
2.3 Абсолютный энкодер серии ENP. 9
2.4 Инкрементальный энкодер с серии ENC. 10
3. Применение 12
4 Энкодеры Sendix 14
5 Вывод 19
6 Список литературы 20
Изм. Лист № докум. Подпис
ь
Дата
Лист
2
14035264000000 ПЗ
Введение.
Датчиками угла поворота или энкодерами называют устройства, при помощи которых
можно определять положение вращающихся валов. Различают инкрементальные
(инкрементные) энкодеры и абсолютные энкодеры. Инкрементальные энкодеры имеют
импульсные выход, при повороте на определённый угол на выходе генерируется импульс
напряжения. На выходе у абсолютных энкодеров генерируется цифровой код уникальный
для каждого положения вала. Помимо контроля положения вращающихся валов, при
помощи энкодеров можно ещё измерять длину, расстояние (инкрементальный энкодер с
мерным колесом), или задавать перемещение инструмента на станке с ЧПУ в ручном
режиме (инкрементальный энкодер штурвал).
Принцип работы энкодеров проиллюстрирован на рисунке 1. Оптический энкодер состоит
из тонкого оптического диска и стационарного блока - измерительной головки,
включающей в себя источник света и фотодетектор. Оптический диск включает
поверхность из прозрачных и непрозрачных участков. Маркерами могут быть, например,
отверстия в металлическом листе или метки на стеклянном диске. При вращении диска, в
зависимости от его типа, маркеры пропускают или перекрывают луч света, направленный
от светового источника к фотоприемнику.
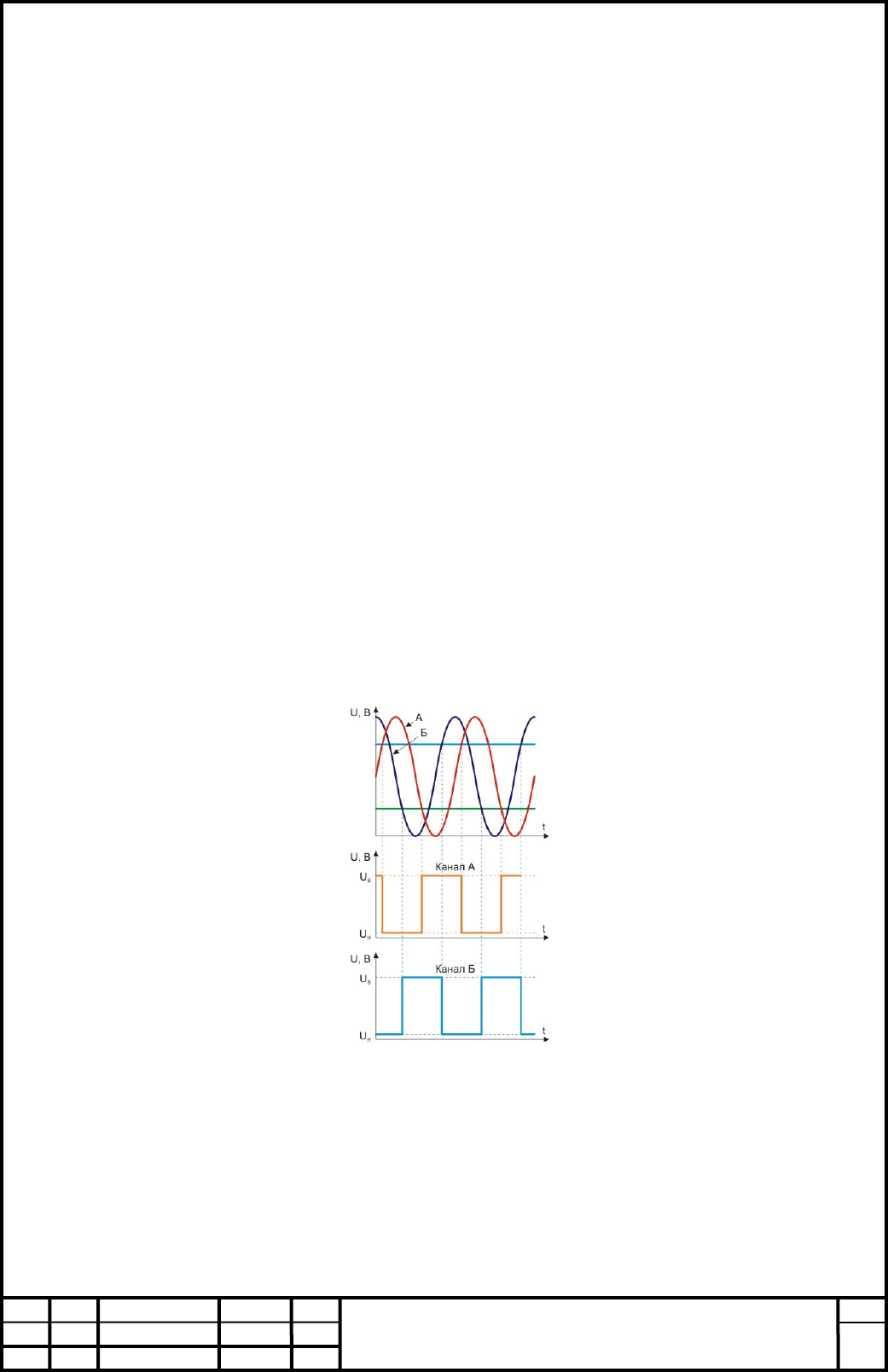
Фотодетектор генерирует сигнал частотой, равной частоте следования кодовых элементов,
в цифровой форме или аналоговый импульсный сигнал, который также может быть
усилен и оцифрован. При добавлении второй пары "светодиод-фототранзистор" с угловым
смещением относительно первой, соответствующим четверти периода сигнала, может
быть получена вторая последовательность импульсов - канал Б с фазовым смещением
относительно канала А на 90°. Инкрементальный энкодер, который использует три
оптических датчика, позволяет одновременно удваивать разрешение при измерении
положения и скорости и детектировать направление.
Рис.1 – принцип действия энкодера.
Датчики линейного и углового перемещения подключаются к модулям АЦП напрямую.
Для питания датчиков можно использовать выход генератора. Разрешение
инкрементальных энкодеров измеряется в импульсах за оборот [1].
Изм. Лист № докум. Подпис
ь
Дата
Лист
3
14035264000000 ПЗ
Принцип работы абсолютного энкодера
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код
для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не
нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал, как во
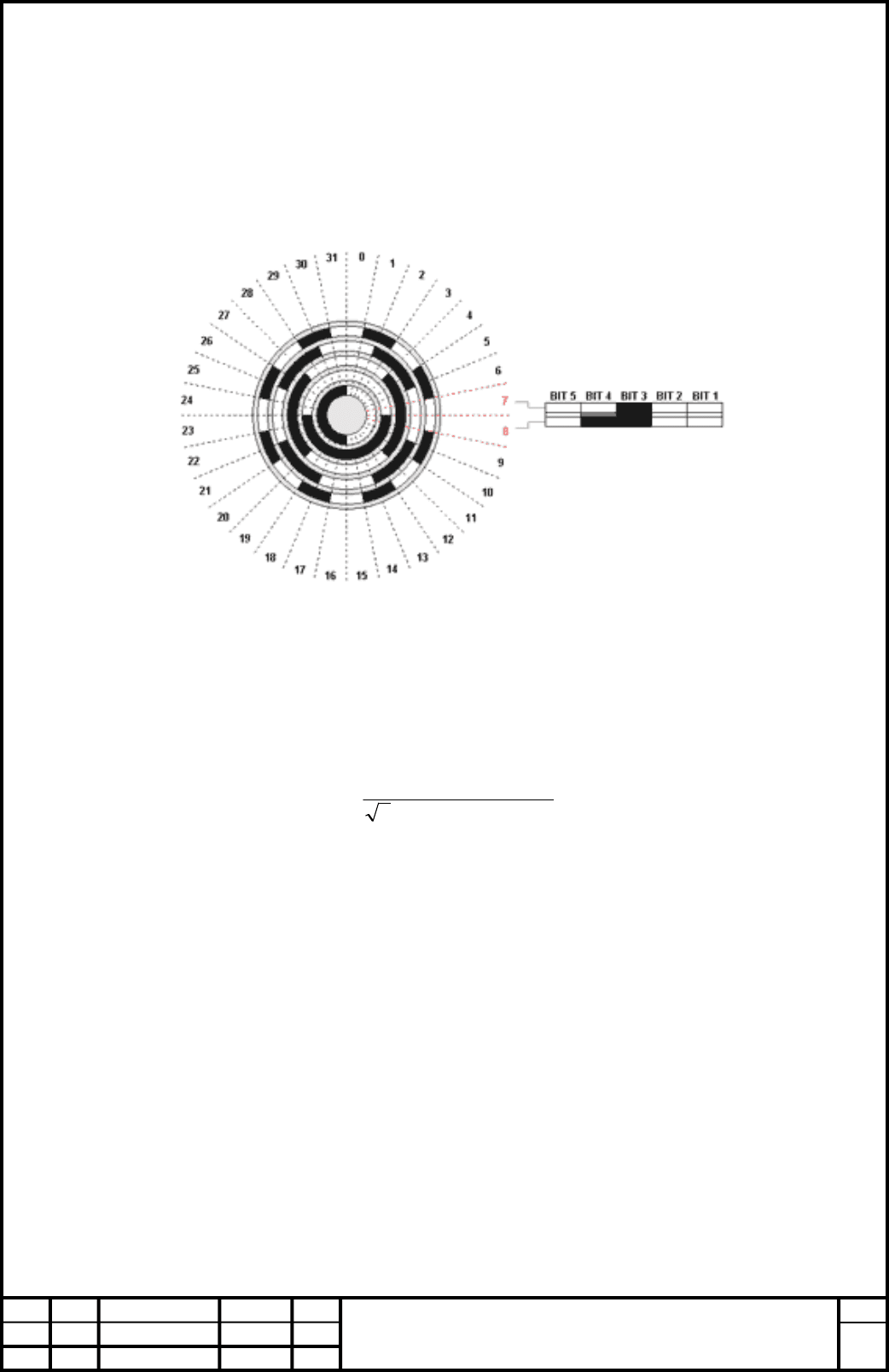
время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска
пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой
дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Рис.2 – Кодовый диск абсолютного энкодера.
Абсолютный энкодер не теряет своего значения при потере питания и не требует
возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам
и для него не требуется точная установка вала. Кроме того, даже если кодированный
сигнал не может быть прочитан энкодером, если, например, вал вращается слишком
быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения
уменьшится. Абсолютный энкодер устойчив к вибрациям [2].
A14,2
73,073,03803
750
I
ном
Пусковой ток электродвигателя определяется по формуле:
I
пуск
=5I
ном
(2.1.2),
После подстановки получаем следующее численное значение:
I
пуск
= 5, = 10,7.
Изм. Лист № докум. Подпис
ь
Дата
Лист
4
14035264000000 ПЗ
Примеры энкодеров различных серий.
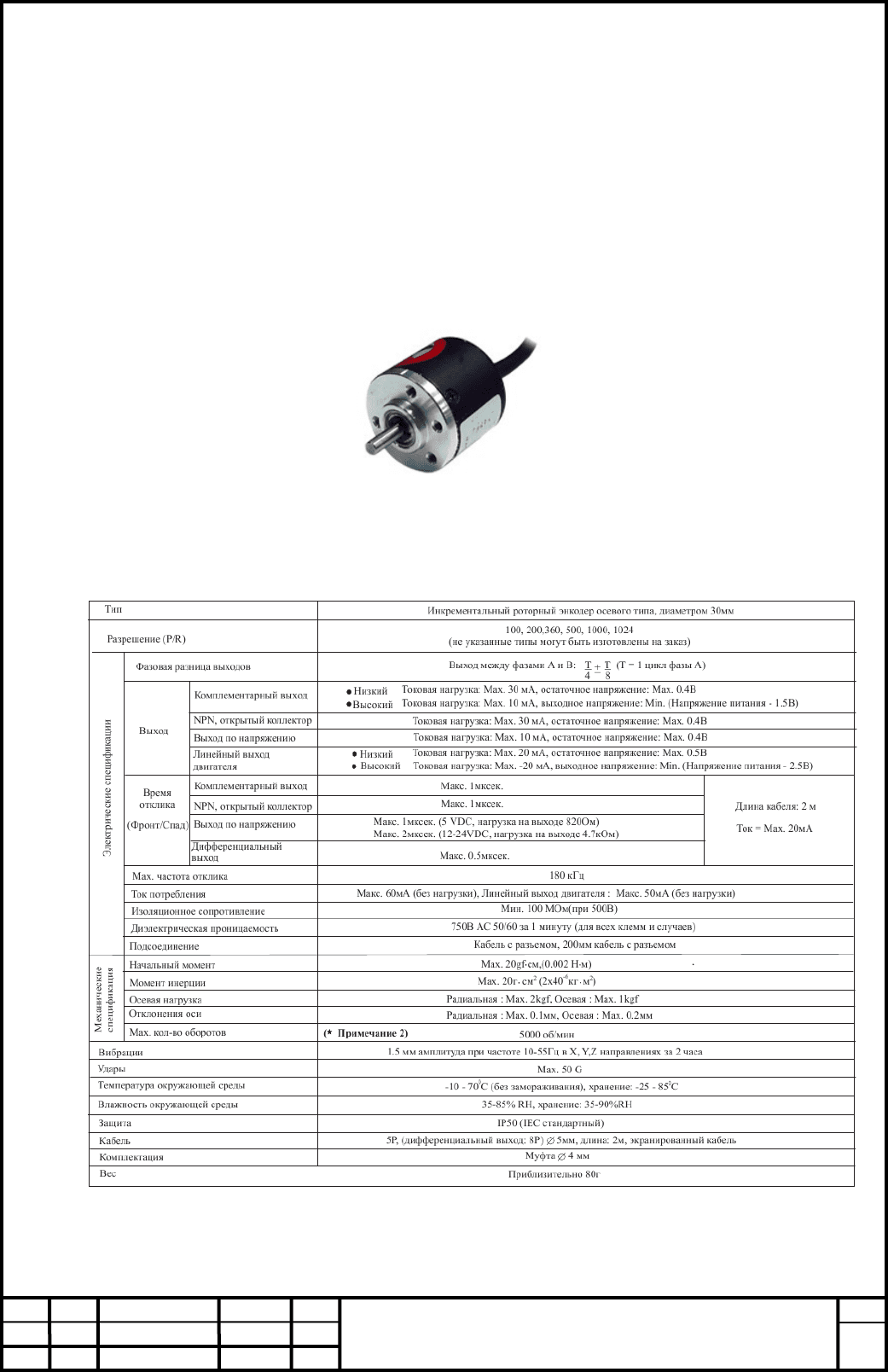
Инкрементальный энкодер E30S.
Инкрементальный энкодер с выступающим валом встраиваемый.
Диаметр корпуса 30мм
Диаметр вала 4мм
Питание: 12-24 VDC или 5 VDC
Тип выхода: универсальный, NPN открытый коллектор, выход по напряжению,
дифференциальный выход (только 5 VDC)
Разрешение: 100, 200, 360, 500, 1000, 1024,3000 импульса на оборот
Рис.3 - Энкодер Серии Е30S.
Характеристики.
Хариктиристики энкодера серии Е30S представлены в таблице 1.
Таблица 1 Технические характеристики Энкодера серии Е30S.
Изм. Лист № докум. Подпис
ь
Дата
Лист
5
14035264000000 ПЗ
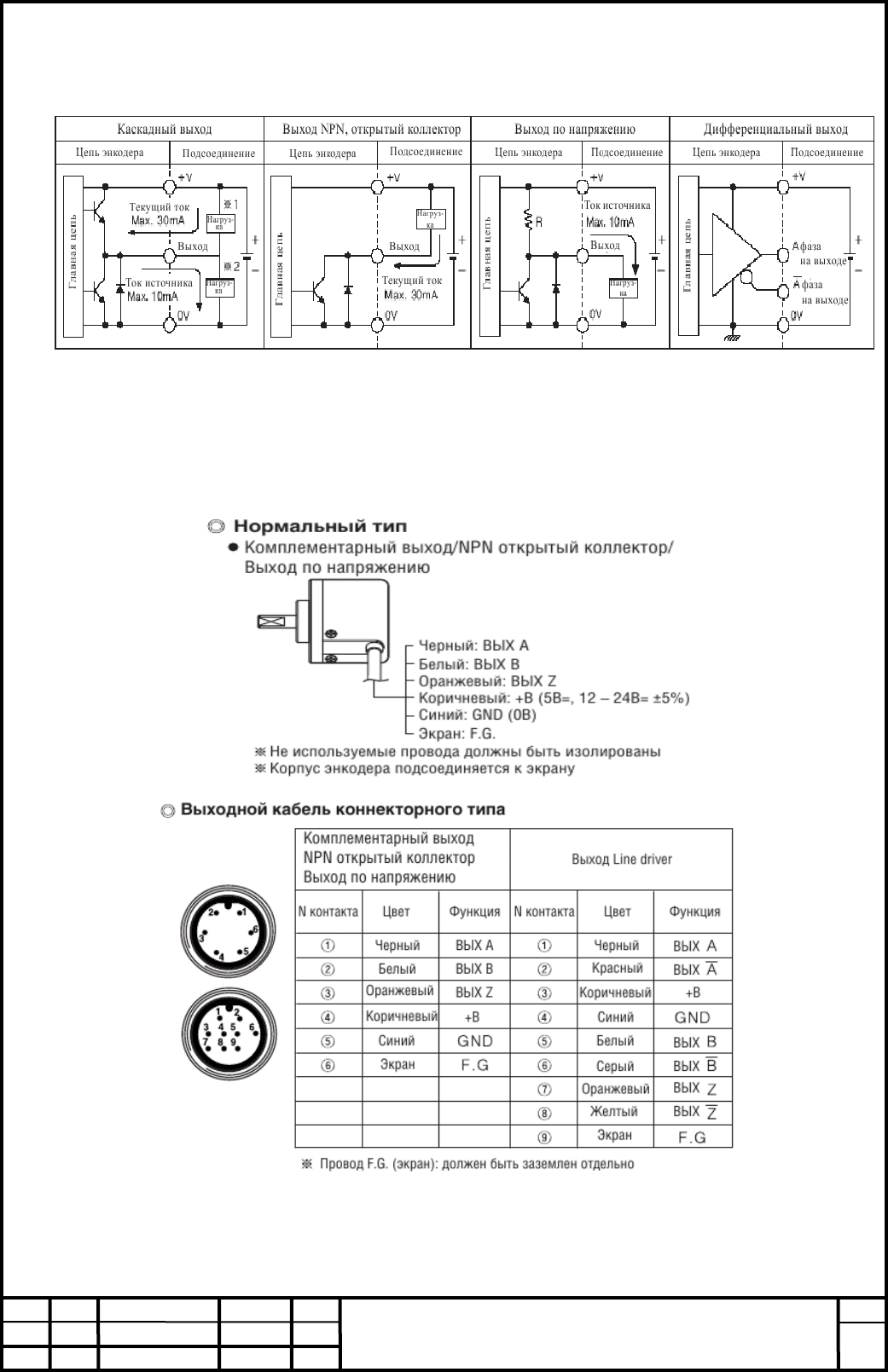
Диаграмма управления выходом.
-Все представленные типы схем выходов имеют одинаковые фазы A, B, Z.
-Комплементарный выход можно использовать для выхода NPN, открытый коллектор (*1)
или выход по напряжению (*2).
Подсоединение.
Рис. 4а, 4б – Подсоединение энкодера серии E30S.
Изм. Лист № докум. Подпис
ь
Дата
Лист
6
14035264000000 ПЗ
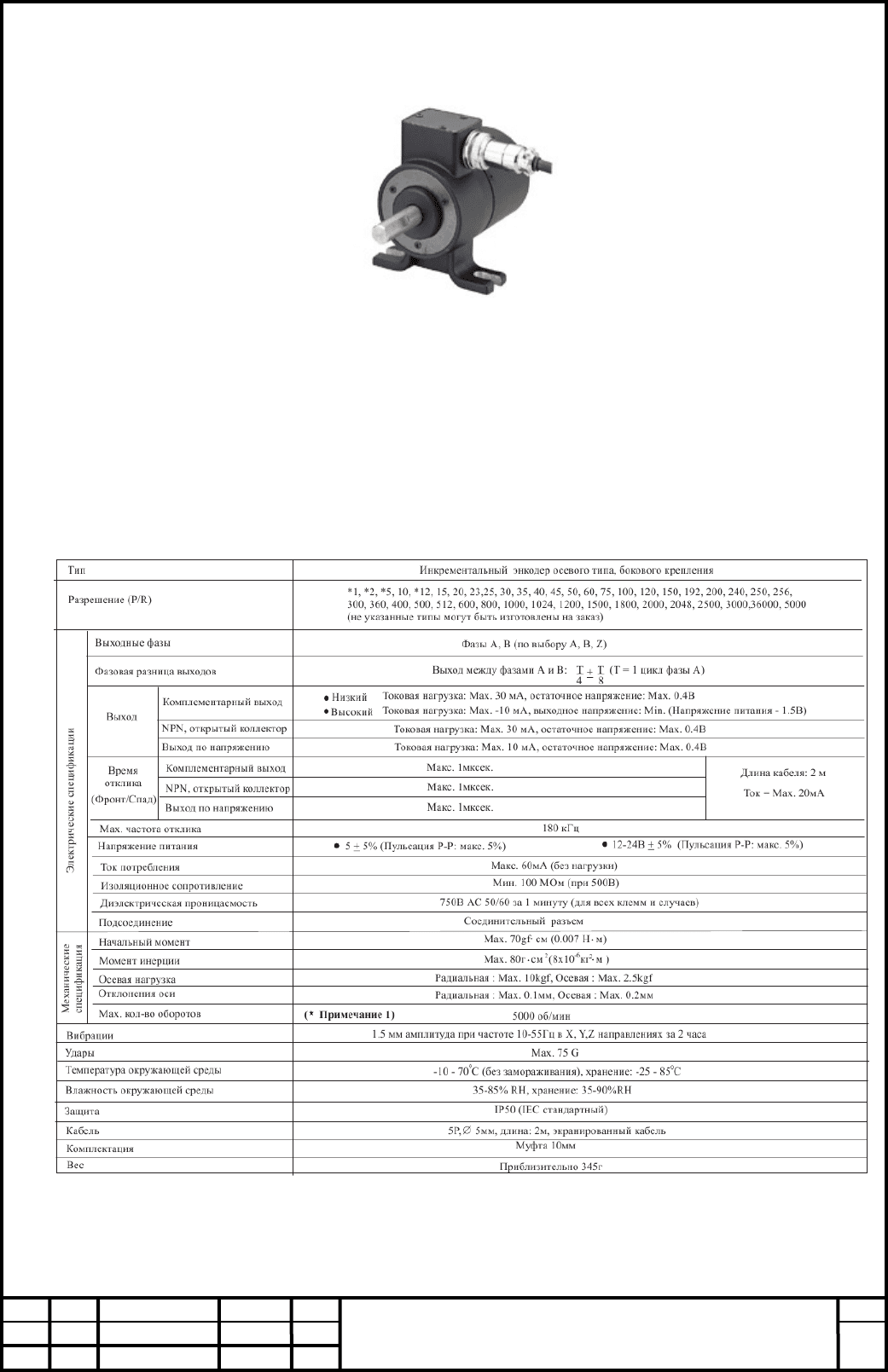
Инкрементальный энкодер с боковым креплением серииENA.
Рис 5 – Инкрементальный энкодер с боковым креплением серии ENA/
Прочная литая конструкция, защищающая от внешних ударов
Монтируется с помощью специальных кронштейнов
Соединительный тип
Источник питания 5В, 12-24В+5%.
Характеристики.
Хариктиристики энкодера серии ЕNA представлены в таблице 2
.
Таблица 2 Технические характеристики Энкодера серии ЕNA.
Изм. Лист № докум. Подпис
ь
Дата
Лист
7
14035264000000 ПЗ
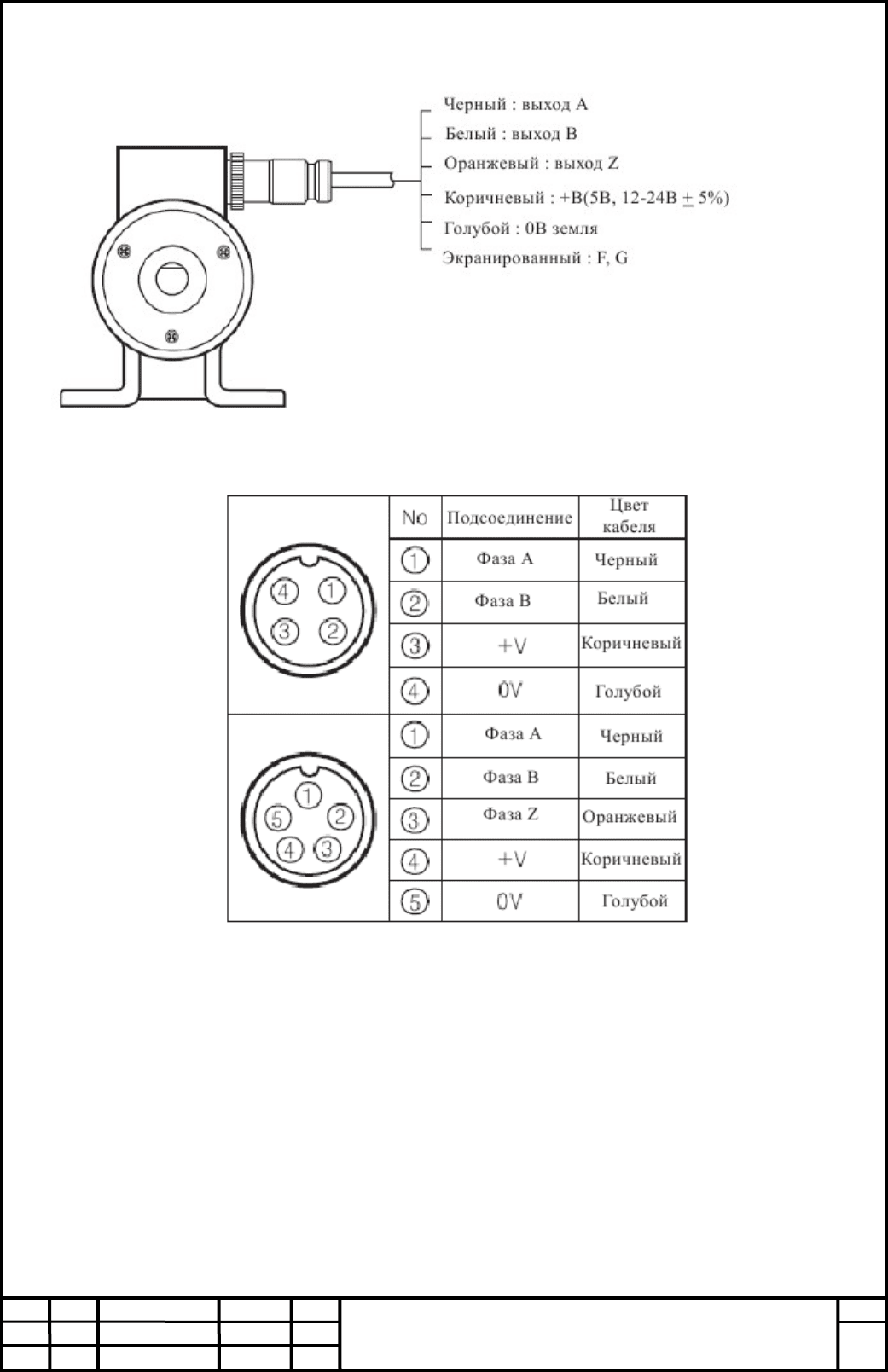
Подсоединение.
Рис 6а, 6б – Подсоединение энкодера серии ENA.
Изм. Лист № докум. Подпис
ь
Дата
Лист
8
14035264000000 ПЗ
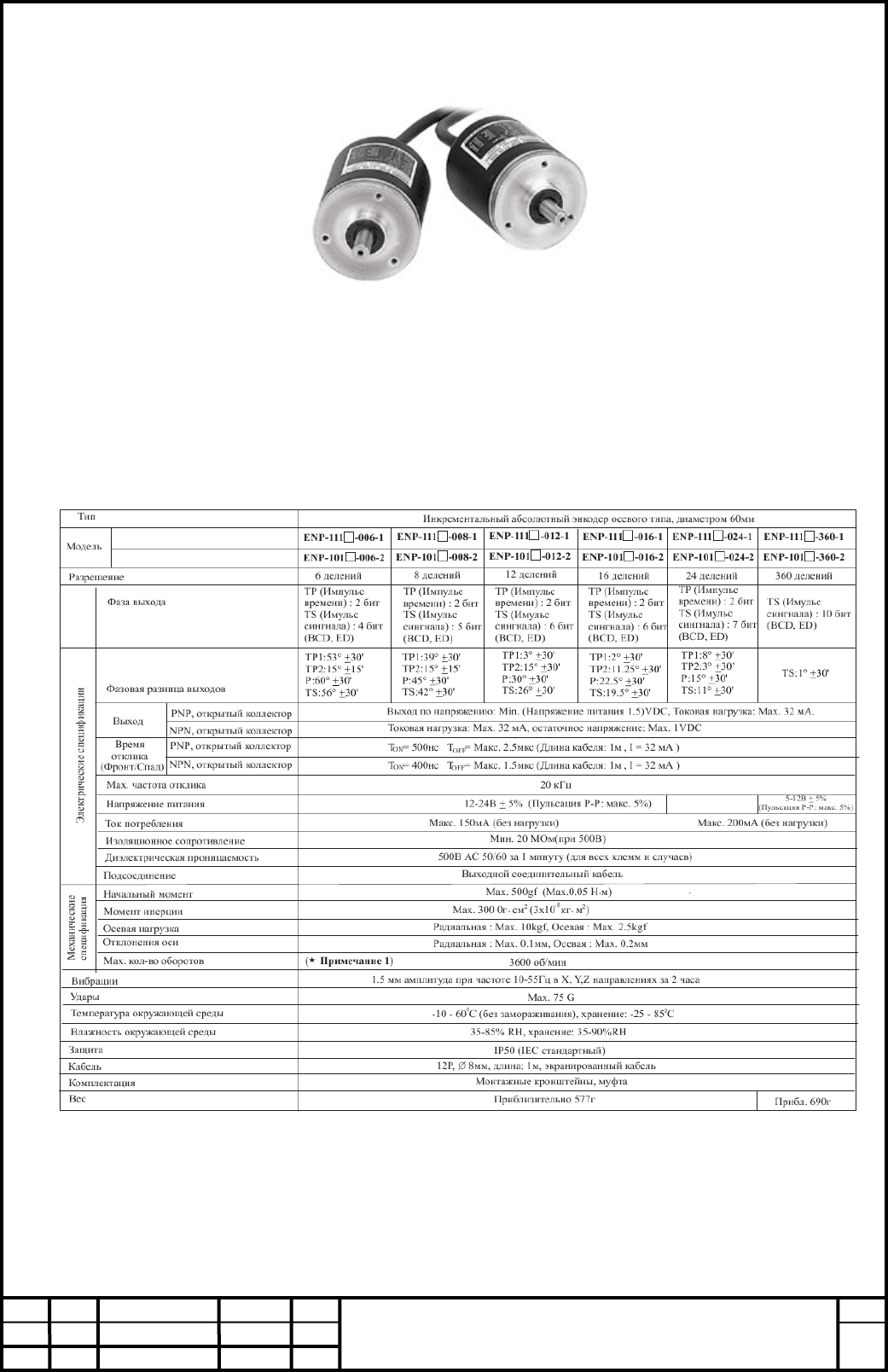
Абсолютный энкодер серии ENP.
Рис.7 – Абсолютный энкодер серии ENP.
-Может измерять абсолютные углы в BCD коде.
-Устойчив к внешним воздействиям.
-Запоминает результаты при отключении питания.
Характеристики.
Хариктиристики энкодера серии ЕNP представлены в таблице 3.
.
Таблица 3 Технические характеристики Энкодера серии ЕNP.
Изм. Лист № докум. Подпис
ь
Дата
Лист
9
14035264000000 ПЗ
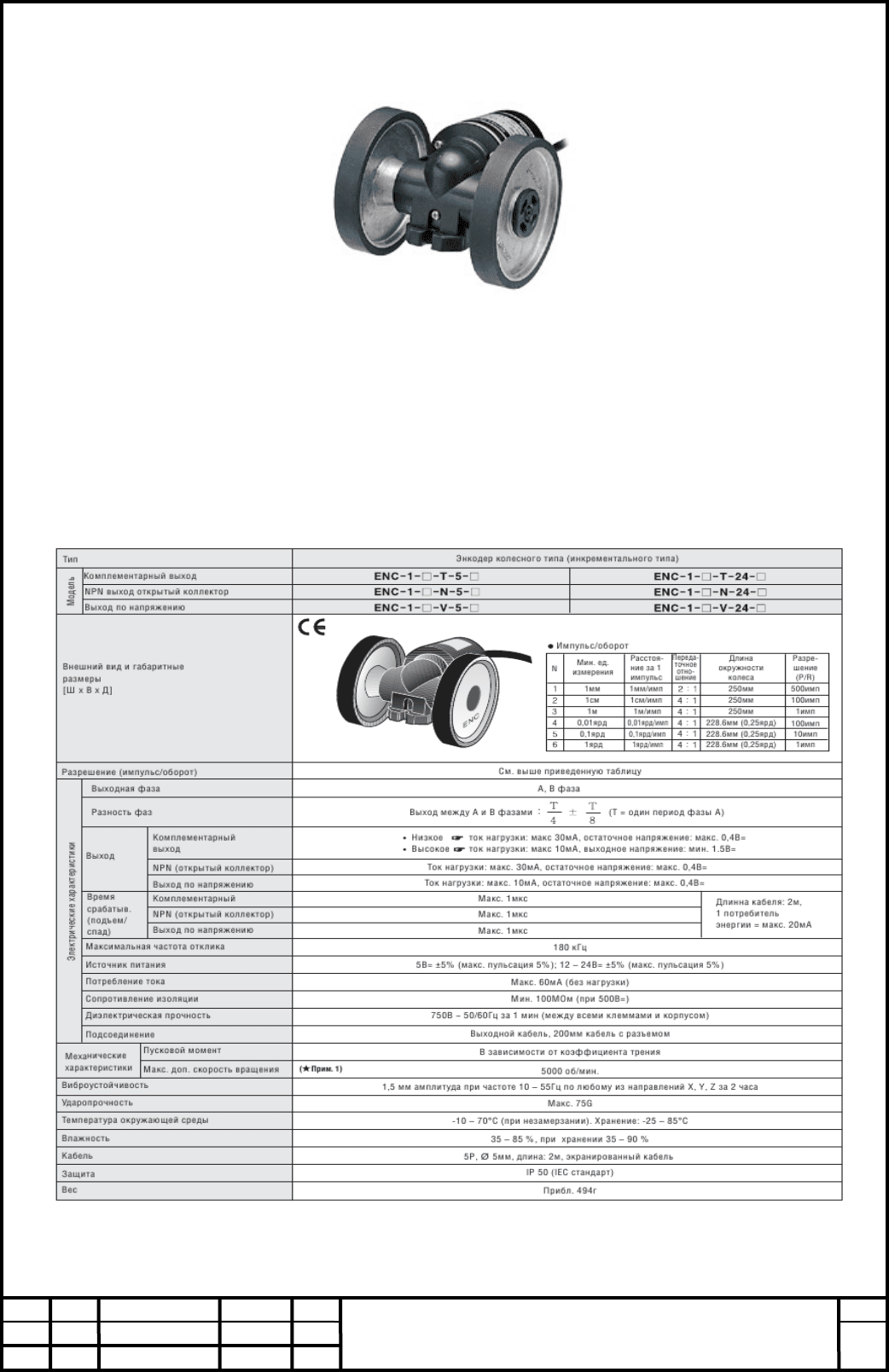
Инкрементальный энкодер с мерными колесиками серии ENC.
Рис. 8 – Инкрементальный энкодер с мерными колесиками серии ENC.
-Применяется для измерения скорости или длины объекта с помощью
мерного колеса.
-Выходной сигнал пропорционален единицам международной системы
измерений.
-Источник питания (5В, 12-24В 5%)
Характеристики.
Хариктиристики энкодера серии ЕNС представлены в таблице 4.
.
Таблица 4 Технические характеристики Энкодера серии ЕNС.
Изм. Лист № докум. Подпис
ь
Дата
Лист
10
14035264000000 ПЗ