Поляков А.Н., Михайлов В.Н. Кинематика универсальных металлорежущих станков
Подождите немного. Документ загружается.

1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Оренбургский государственный университет»
Кафедра металлообрабатывающих станков и комплексов
А.Н. ПОЛЯКОВ, В.Н. МИХАЙЛОВ
КИНЕМАТИКА УНИВЕРСАЛЬНЫХ
МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
МЕТОДИЧЕСКОЕ РУКОВОДСТВО К ЛАБОРАТОРНОЙ РАБОТЕ
Рекомендовано к изданию Редакционно – издательским советом
государственного образовательного учреждения высшего профессионального
образования «Оренбургский государственный университет»
Оренбург 2004
2
ББК 34.7 я73
П 78
УДК 681.7. 053.2 (075.8)
Рецензент
кандидат технических наук, доцент Никитина И.П.
Поляков А.Н., Михайлов В.Н.
П 78 Кинематика универсальных металлорежущих станков:
Методическое руководство к лабораторной работе. –
Оренбург: ГОУ ОГУ, 2004. – 18с.
В методических указаниях рассмотрены кинематические цепи
токарно-винторезного станка 1К62.
Методические указания рекомендуется использовать при
выполнении лабораторных работ по дисциплинам: «металлорежущие
станки» для специальностей 120200 и 120100; «оборудование отрасли»
для специальности 030500; «механизмы металлообрабатывающего
оборудования» 210200; «механизмы и оборудование отрасли» для
специальности 060801 для студентов очной, очно-заочной и заочной
форм обучения.
ББК 34.7 я 73
© Михайлов В.Н., 2004
© ГОУ ОГУ, 2004
3
Лабораторная работа №2
Кинематика универсальных металлорежущих станков
1 Цель лабораторной работы
Цели данной лабораторной работы следующие;
1.1 Изучение кинематической структуры универсального токарно- винторезного
станка;
1.2 Приобретение практических навыков анализа кинематических схем и структур
универсальных металлорежущих станков.
2 Порядок выполнения работы
2.1. Изучить по разделу 3 методику формирования уравнения кинематического
баланса и вывода формулы настройки.
2.2. С помощью стенда, управляемого микро-ЭВМ или рисунка 2 раздела 4,
изучить кинематические цепи приводов главного движения, цепи приводов подач,
винторезные цепи (для нарезания метрической и дюймовой резьбы) и цепь ускоренного
перемещения суппорта универсального токарно-винторезного станка.
2.3. Выполнить выданные преподавателем индивидуальные задания по настройке
станка на заданное значение продольной и поперечной подачи, нарезание метрической
или дюймовой резьбы, либо выполнить эти задания, работая со стендом, управляемым
микро-ЭВМ в режиме контроля знаний.
2.4. Оформить отчёт в соответствии с требованиями раздела 6.
3 Общие положения
Результатом работы металлорежущего станка является образование поверхностей
летали с заданными формой, размерами, точностью и шероховатостью. Для этого
необходимо обеспечить требуемые условия кинематического согласования перемещений
или скоростей исполнительных органов между собой и источником движения. Этот
процесс называется кинематической настройкой станка.
В большинстве металлорежущих станков с механическими связями для настройки
кинематических цепей применяются органы кинематической настройки в виде гитар
сменных зубчатых колес, ременных передач, вариаторов, регулируемых
электродвигателей коробок скоростей и подач, характеристикой которых является общее
передаточное отношение i органа.
Значение передаточного значения органа настройки определяют по формуле
настройки и затем его реализуют в гитарах сменных зубчатых колес подбором и
установкой, соответствующих колес в гитаре, а в коробках скоростей и подач -
зацеплением зубчатых колес.
Для вывода формулы настройки любого органа необходимо по кинематической
схеме станка наметить такую цепь передач, которой располагается данный орган и
известны перемещения или скорости конечных звеньев этой цепи, связанные функцио-
нальной или требуемой зависимостью. Желательно, чтобы такая цепь передач (она
называется цепью согласования), включала в себя только один орган настройки, для
которого выводится формула.
Для выбранной цепи согласования составляют условие
кинематического согласования перемещений её конечных звеньев,
совершающихся в течение определенного промежутка времени, или их

4
скоростей. Эти перемещения могут быть угловыми, линейно-угловыми и
линейными.
С учетом условия согласования перемещений или скоростей составляется
уравнение кинематического баланса цепи согласования, в котором
неизвестным является передаточное отношение i органа настройки. При этом следует
учитывать, что при совпадении порядка записи с направлением передачи движения через
орган настройки символ i записывается в числитель. Если порядок записи не совпадает с
направлением передачи движения, то символ i записывается в знаменатель. Кроме того
уравнение кинематического баланса может записываться от любого конца цепи
согласования.
Решение уравнения кинематического баланса относительно передаточного
отношения i органа настройки представляет собой формулу настройки.
В общем виде формула настройки показывает зависимость
передаточного отношения органа настройки от переменных параметров
условия кинематического согласования и её постоянной:
),V,C(Fi
=
где i – передаточное отношение органа настойки;
С – постоянная цепи согласования, зависящая от передаточных отношений ее
промежуточных передач и постоянных параметров условия
согласования;
V – переменные параметры цепи согласования.
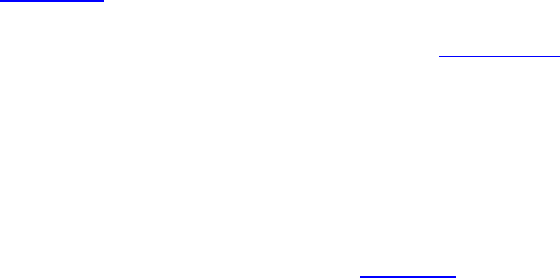
Рассмотрим методику вывода формулы настройки на примере токарно-
винторезного станка для нарезания цилиндрической резьбы с шагом Р (мм), упрощенная
кинематическая схема которого приведена на рисунке 1.
Токарно-винторезный станок имеет два органа кинематической настройки:
- винторезную гитару сменных зубчатых колёс: I
винт
.=А/В;
- гитару сменных зубчатых колёс: I
V
= А
′
/В
′
.
Через первый орган настройки устанавливается функциональное
согласование вращения шпинделя и перемещения продольного перемещения
суппорта с резцом, а через второй – согласование скоростей вращения
источника движения – электродвигателя
М и шпинделя станка.
Для вывода формул настройки I
винт
. и I
V
, надо составить условие согласования
перемещений конечных звеньев цепей:
- шпиндель станка – продольный суппорт;
- двигатель – шпиндель станка.
Затем сформировать соответствующие им уравнения кинематического баланса и
решить их относительно I
винт
. и I
V
.
3.1 Вывод формулы настройки винторезной гитары I
винт
. :
а) Кинематическая цепь согласования:
шпиндель станка – продельный суппорт;
б) Условие согласования конечны звеньев цепи:
1
оборот шпинделя
↔Р
перемещения продольного суппорта с резцом,
где Р - шаг нарезаемой резьбы, мм,
5
↔ - знак соответствия.
Рисунок 1 - Упрощенная кинематическая схема токарно-винторезного станка
в) Уравнение кинематического баланса:
- в общем виде:
РPIЕ1
х.в.винт
об.шп.
=
⋅
⋅
⋅
,
где Е – общее передаточное отношение всех постоянных передач цепи
согласования за исключением передачи ходовой винт-гайка
станка;
Р
х.в.
– шаг ходового винта станка, мм
- для кинематической схемы на рисунке 1:
РP
B
A
z
z
1
х.в.
4
3
об.шп.
=⋅⋅⋅
,
г) Формула настройки:
- в общем виде:

6
,РС
РЕ
P
I
винт
х.в.
винт.
⋅=
⋅
=
где С
винт
. – постоянная цепи согласования.
- для кинематической схемы на рисунке 1.
.
3х.в.
4
zР
zР
В
А
⋅
⋅
=
3.2 Вывод формул настройки гитары IV
:
а) Кинематическая цепь согласования:
электродвигатель – шпиндель станка;
б) Условие согласования скоростей конечны звеньев цепи:
n
дв.,
мин
-1
эл. двигателя
↔ n
шп
, мин
-1
шпинделя
в) Уравнение кинематического баланса:
- в общем виде:
шп.vдв.
nIRn
=
⋅
⋅
,
где R – общее передаточное отношение всех постоянных передач цепи
согласования.
- для кинематической схемы на рисунке 1:
.
шп
'
'
2
1
2
1
дв.
n
В
А
z
z
D
D
n =⋅⋅⋅
г) Формула настройки:
- в общем виде:
шп.v
дв.
шп
v
nC
Rn
n
I ⋅=
⋅
=
- для кинематической схемы на рисунке 1:
11дв
22шп
'
'
DZn
DZn
B
A
⋅⋅
⋅⋅
=
Таким образом с помощью формулы настройки можно определить необходимые
для обеспечения условий согласования значения А, В, А
′
, В
′
.

7
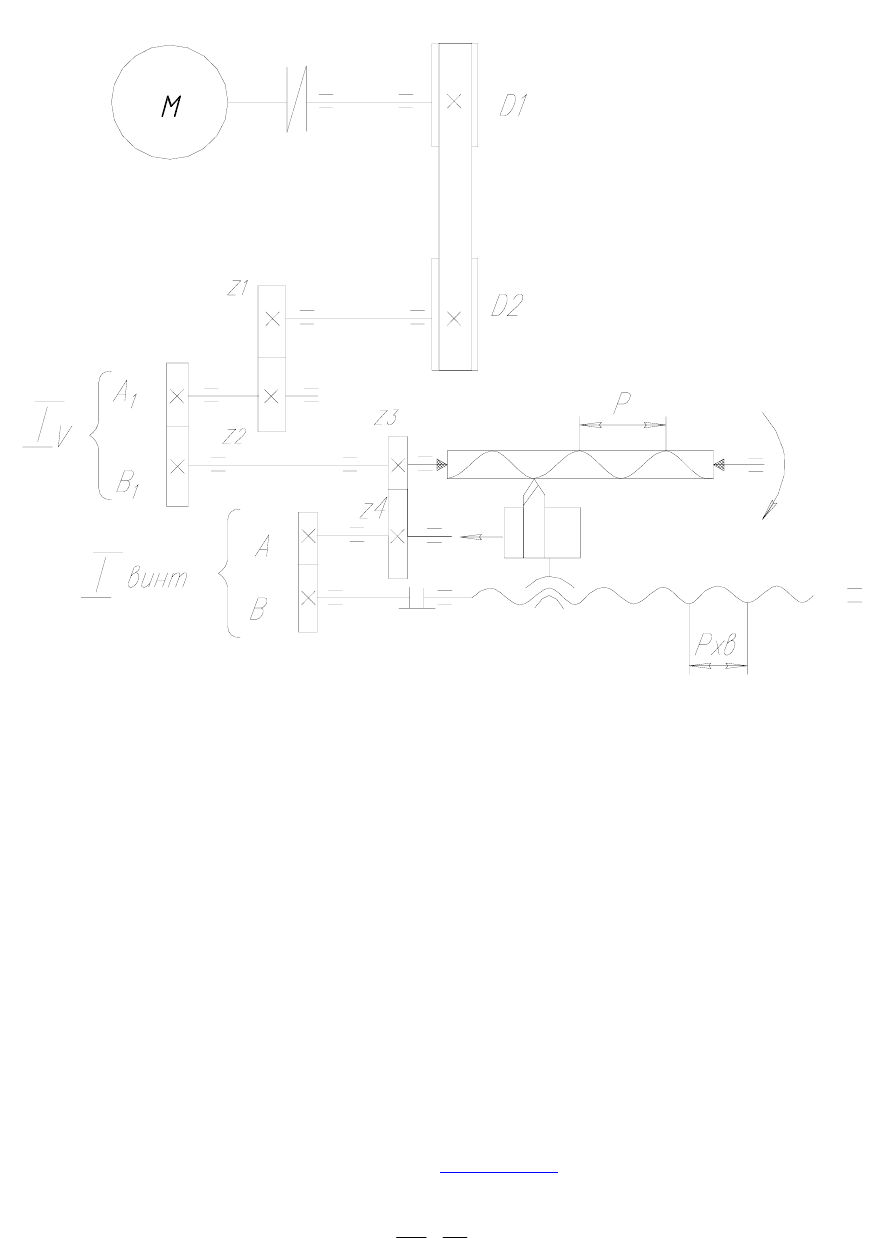
4 Кинематика токарно-винторезного станка 1К62 (рисунок
2):
Станок предназначен для выполнения разнообразных токарных работ в том числе
для нарезания различных резьб и используется главным образом в условиях единичного и
мелкосерийного производства.
Основные узлы станка:
- СТАНИНА, которая служит для соединения между собой всех узлов станка;
- ПЕРЕДНЯЯ БАБКА, в которой помещены шпиндель и коробка
скоростей;
- СУППОРТ, на котором закрепляется режущий инструмент;
- ЗАДЯЯ БАБКА;
- КОРОБКА ПОДАЧ, передающая вращение ходовому валу и ходовому винту;
ТУМБА.
Движения в станке:
- Вращение шпинделя (главное движение);
- Продольное и поперечные подачи суппорта;
- Быстрые перемещение суппорта.
8
Рис
у
нок 2 – Кинематическая схема тока
р
но винто
р
езного станка 1К62
9
4.1 Кинематическая цепь привода главного движения
Эта кинематическая цепь обеспечивает передачу вращения от электродвигателя М1
шпинделю VI c возможностью включения различных частот вращения. Шпиндель станка
может иметь правое и левое направление вращения. При правом направлении вращения
шпинделя уравнение кинематического баланса привода главного движения запишется так
(муфта МФ1 включена влево):
1450⋅
254
142
⋅
0.985
39
51
⋅
55
21
⋅
88
22
88
22
⋅
=n
шп
,
мин
-1
34
56
47
29
88
22
45
45
⋅
38
38
45
45
45
45
⋅
⋅
54
27
43
65
При правом направлении вращения шпинделя может быть настроено 23 частоты
вращения в диапазоне n
шп
= 12,5÷2000 мин
-1
.
При левом направлении вращения шпинделя уравнение кинематического баланса
привода главного движения запишется следующим образом (муфта МФ1 включена
вправо):
1450⋅
254
142
⋅0.985
24
50
⋅
38
36
⋅
55
21
⋅
88
22
88
22
⋅
=n
шп
,
мин
-1
47
29
88
22
45
45
⋅
38
38
45
45
45
45
⋅
⋅
54
27
43
65
При левом направлении вращения шпинделя может быть реализовано 12 частот
вращения в диапазоне
n
шп.
= 19 ÷2420 мин
-1
.
4.2 Кинематическая цепь привода продольной подачи
Для настройки на станке всех видов продольных и поперечных подач
нужно смещенные блоки гитары Б8 и Б9 поставить так, чтобы передача осуществлялась
через колеса с передаточным отношением U(VIII-IX)=42/95*95/50, включить муфты
МФ4, МФ5. При таком положении муфт ступенчатый конус шестерен Б10 (конус
Нортона) становиться ведущим и включается передача через ходовой вал XVI.
На станке можно настраивать нормальную подачу суппорта, подачу,
увеличенную вдвое, и подачу, увеличенную в большей число раз.

10
4.2.1 Нормальная подачи
Для настройки станка на эти подачи блок Б6 переключают в левое положение -
U(VI-VII)=60/60, а блок Б7 в среднее положение - U(VII-VIII)=28/56.
Управление кинематического баланса в этом случае запишется
следующим образом:МФ7
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅ (МФ
7
28
20
20
27
(МФ6)
56
28
U2(МФ3)
28
25
36
Z
МФ2) (
50
95
95
42
56
28
60
60
об.шп. 1.
⋅
20
4
⋅
37
40
⋅
(МФ8 или МФ9)
⋅
66
14
⋅ 10 ⋅ 3 = S
пр.
, мм/об,
37
45
45
40
⋅
где МФ6 - обгонная муфта для включения цепи подач от
электродвигателя М2 при быстром перемещении суппорта;
МФ7 - предохранительная муфта, пробуксовывающая при перегрузке
механизма подач;
МФ8, МФ9 – муфты для включения подачи суппорта влево или
вправо;
Z - число зубьев шестерни ступенчатого конуса Б10, которая
находится в зацеплении с накидной шестерней Z=36;
U2 - передаточное отношение передачи от вала XII валу XIV, которая
переключается блоками Б11 и Б12.
Формула настройки: Z⋅U2/46=S
пр
, мм/об.
Подставляя в формулу настройки семь значений Z (26, 28, 32, 36, 40, 44, 48) и
четыре значения U2(1/8, 1/4, 1/2, и 1), определяют величины 28 ступеней подач в
пределах: S
пр
=0,07÷1,04 мм/об.
4.2.2 Подачи, увеличенные вдвое
Эти подачи настраиваются перемещением блока Б7 в левое положение, при
котором U (VII-VIII) = 42/42 = 1. в остальном кинематическая цепь совпадает с указанной
выше. В результате подачи будут увеличены вдвое по сравнению с нормальными
S
пр
=Z⋅U2/23.
4.2.3 Подачи, увеличенные в большее число раз
Эти подачи настраиваются установкой блока Б6 так, чтобы его шестерня Z=45
зацеплялась с шестерней Z=45 на валу III, тогда вращение с вала VI на вал VII передается
уже через зубчатые передачи на валах III, IV, V.