Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств
Подождите немного. Документ загружается.

114
Наибольшее распространение получили двухпозиционные регуляторы, у ко-
торых выходная величина может принимать только два значения: минималь-
ное или максимальное. Иногда такие регуляторы называют регуляторами ти-
па «открыто» — «закрыто».
Статические характеристики идеального двухпозиционного регулято-
ра и регулятора с зоной нечувствительности (т. е. при неоднозначной харак-
теристике) приведены на рис. III-3. Если текущее значение входной величи-
ны идеального регулятора у
т
меньше заданного и
3
= у
0
, то его выходная ве-
личина х
р
принимает минимальное значение, равное нулю. Если же у
т
>и
3
, то
выходная величина х
р
принимает максимальное значение х
р
,max (рис. III-
3,а). При изменении текущего значения регулируемой величины в момент
перехода им заданного значения выходная величина Пз-регулятора быстро
изменяется от одного крайнего положения до другого. Таким образом, работа
идеального (с однозначной характеристикой) Пз-регулятора может быть
представлена в виде:
{
У регулятора с зоной нечувствительности выходная величина х изме-
няется от 0 до значения х
р,max
при у = и
3
+δy
t
/2 и от значения х
р,мах
до нуля —
при у = и
3
- δy
t
/2 (рис. 7III-3,б). Характеристика такого регулятора выражает-
ся следующим образом
{
(III, 13.a)
В интервале
величипа х
р
может принимать два значения (0 и x
p
,
mах
) в зависимости
от предыдущих значений у. Переход с нижней ветви па верхнюю осуществ-
ляется при условиях:
а с верхней ветви на нижнюю — при условиях
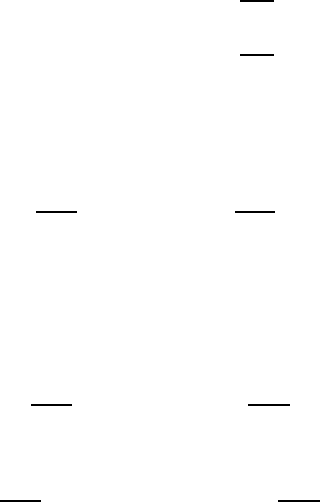
На рис. III-3, в и г показаны статические характеристики тех же регу-
ляторов в относительных величинах. Для идеального
115
Рис. III-4. График изменения входной величины Пз-регулятора (а, г) выходных
величин идеального Пз-регулятора (б, д) и Пз-регулятора с зоной нечувствительности (в,
е) в абсолютных (а, б, в) и относительных (г, д, е) величинах.
регулятора они могут быть записаны в виде:
{
(III, 13.б)
а для регулятора с зоной нечувствительности
{
(III, 13.в)
Условие перехода х снизу вверх принимает вид
а сверху вниз
При непрерывном произвольном изменении технологической величи-
ны у
т
(рис. III-4, а) выходная величина x
р
Пз-регулятора с идеальной статиче-
ской характеристикой принимает другое значение только при переходе у
т
за-
данного значения и
3
, т. е. в момент изменения знака отклонения у
т
—и
3
. Пз-
регулятор не учитывает, удаляется ли регулируемая величина от заданного
значения или приближается к нему, а также изменяется ли она с большой или
малой скоростью (рис. III -4,б).
При непрерывном возрастании входной величины выходная величина
Пз-регулятора с зоной нечувствительности (рис. III-4, в) принимает другое
значение в момент, когда

116
если же входная величина понижается, то — в момент, когда
Изменение входной величины и динамические характеристики рас-
сматриваемых регуляторов в относительных величинах даны на рис. III-4, г—
е. Далее статические и динамические характеристики всех регуляторов при-
водятся только в относительных величинах.
Статические и динамические зависимости (см. рис. III-3 и III-4) соот-
ветствуют регуляторам с прямой характеристикой или регуляторам, настро-
енным па «максимум». При настройке их На «минимум», в случае, например,
идеальной характеристики, выходная величина принимает значение пуль, ес-
ли у
т
>и
3
, и значение х
р мах
, если у
т
<и
3
. Статическая характеристика такою ре-
гулятора в относительных величинах записывается следующим образом:
{
(III, 13.г)
Примерами Пз-регуляторов или двухпозиционных устройств могут
служить электроконтактный термометр, биметаллический сигнализатор тем-
пературы, электроконтактный манометр, пневматическое реле и др.
Работа Пз-регуляторов в замкнутом контуре регулирования рассмот-
рена в гл. VI.
Интегральные регуляторы (И-регуляторы). К ним относятся те, у ко-
торых изменение выходной величины х пропорционально интегралу откло-
нения входной величины у от заданного значения и по времени. Уравнение
динамики И-регулятора имеет вид
∫
(III, 14)
где Т
и
— время интегрирования регулятора или время изменения его
выходной величины па 1% при отклонении входной величины от заданного
значения на 1% максимально возможного отклонения. Время Т
и
— настро-
ечный параметр И-регулятора. С увеличением Т
и
воздействие входной вели-
чины регулятора на выходную ослабевает.
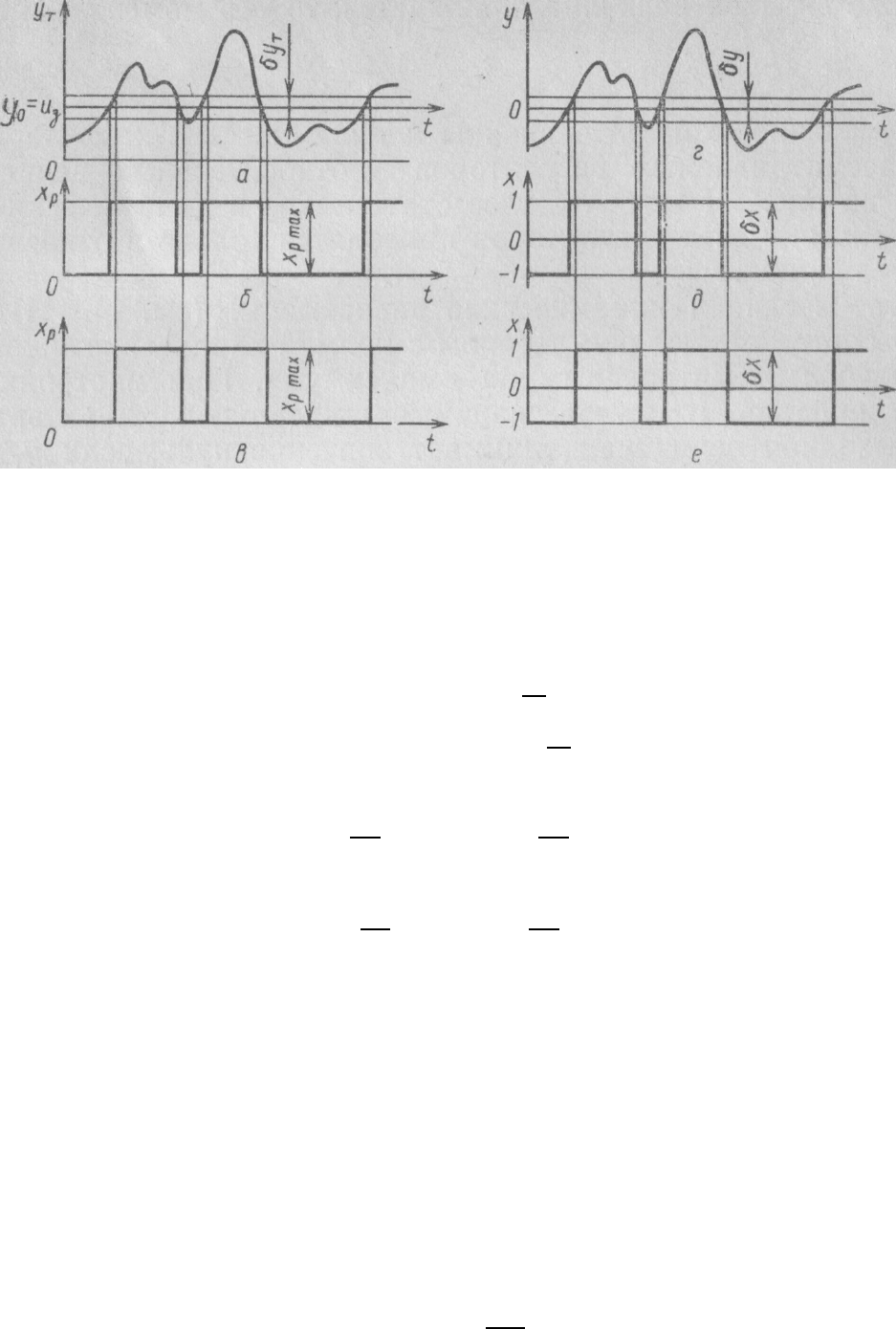
Переходная характеристика И-регулятора имеет вид
(
)
(III, 15)
Это уравнение наклонной прямой. Переходные характеристики И-
регулятора при двух различных значениях времени интегрирования приведе-
ны на рис. III-5. В обоих случаях угол наклона переходных характеристик не
изменяется во времени. Для нахождения времени интегрирования Т
и
по пе-
реходной характеристике на поле чертежа наносят единичное ступенчатое
117
Рис. III-5. Переходные характеристики И-регулятора при разных зна-
чениях времени интегрирования.
Рис. III-6. Структурная схема И-составляющей промышленных регу-
ляторов.
изменение величины в том же масштабе. Координата точки пересечения этих
характеристик по оси абсцисс определяет величину времени интегрирования.
В динамическом отношении И-регулятор представляет собой инте-
грирующее звено с передаточной функцией
(
)
(III, 16)
Пример структурной схемы части промышленного регулятора, отра-
батывающего
И-составляющую закона регулирования, приведен на рис. III-6. Передаточ-
ные функции звеньев этой схемы определяются следующими выражениями:
(
)
(
)
(
)
(
)
(III, 17)
Передаточная функция всей схемы находится по равенству
(
)
( )
( )
(
)
(
)
( )
( )
( )
(III, 18)
Подставим в равенство (III,18) значения из выражений (III,17)
(
)
Разделим числитель и знаменатель полученной дроби на k и, прене-
брегая в знаменателе слагаемым 1/k, окончательно получим
(
)
(III, 19)
что соответствует передаточной функции И-регулятора.
Амплитудно-фазовая характеристика И-регулятора определяется за-
висимостью
(
)
(III, 20)
118
При гармоническом изменении входной величины выходная величина
И-регулятора изменяется по гармоническому закону с запаздыванием по фазе
на угол π/2; при этом амплитуда выходных колебаний зависит от частоты ко-
лебаний со и значения постоянной Т
и
.
При автоматизации химико-технологических объектов иногда исполь-
зуют И-регуляторы без вспомогательного источника энергии. Устройства с
интегральным законом обычно вводятся в более сложные законы регулиро-
вания в качестве одной из составляющих.
Пропорциональные регуляторы (П-регуляторы). К ним относятся те, у
которых выходная величина в пределах зоны регулирования изменяется про-
порционально изменению входной величины.
Уравнение динамики П-регулятора имеет вид
(III, 21)
где k
p
— коэффициент передачи (пропорциональности) регулятора.
Каждому значению входной величины П-регулятора соответствует
определенное значение выходной величины. Сигнал на выходе П-
регуляторов меняется только при изменении сигнала на входе.
Параметром настройки П-регулятора является зона регулирования,
или предел пропорциональности δ, под которым понимают диапазон измене-
ния входной величины регулятора, выраженный в процентах от максималь-
ного интервала, в пределах которого изменение входной величины приводит
к изменению выходной величины регулятора от одного крайнего значения до
другого. Значение пределов пропорциональности
П-регулятора может изменяться и устанавливаться в широких пределах, оно
может составлять от двух до нескольких тысяч процентов.
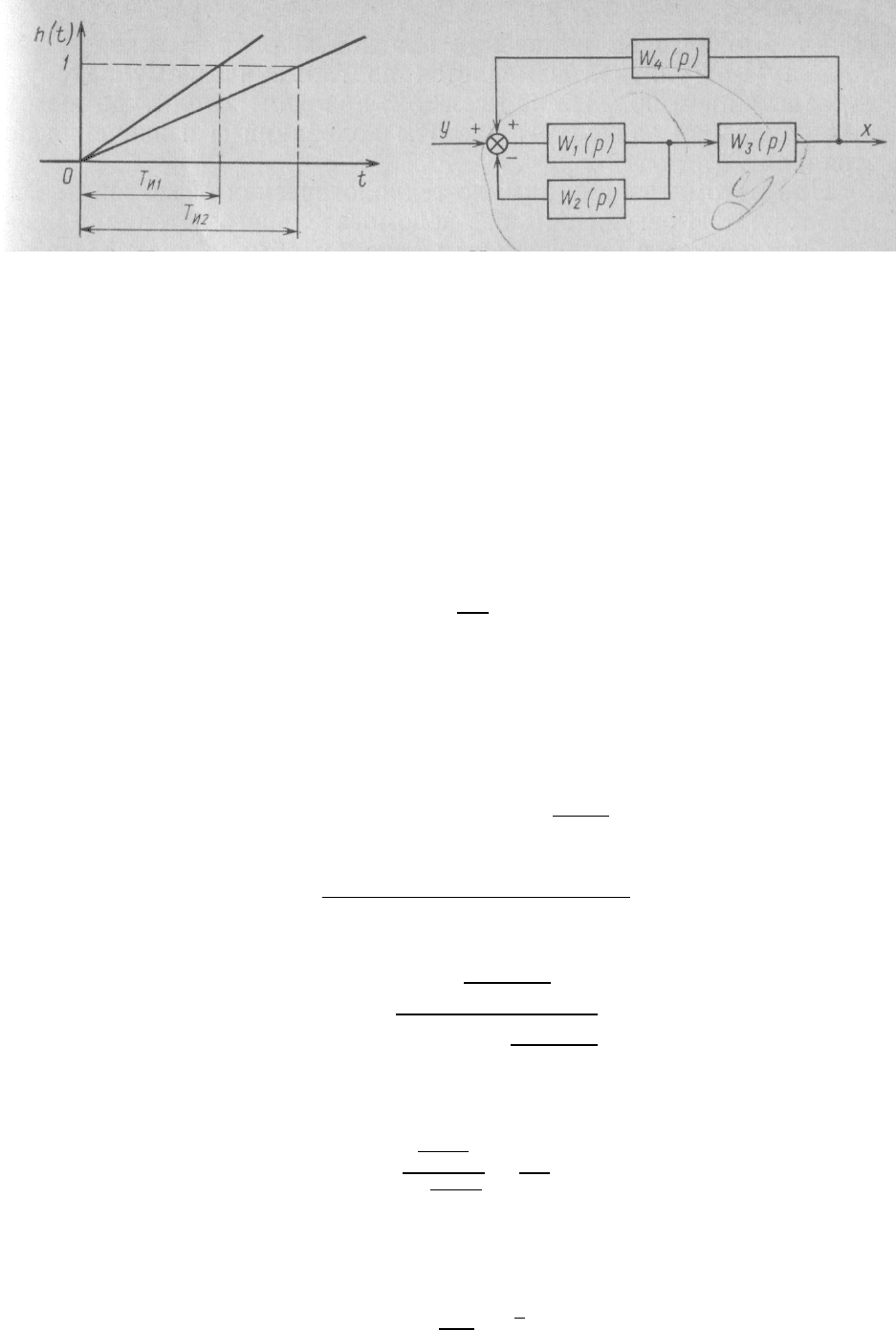
Рис. III-8. Переходные характеристики П-регулятора при разных значениях ко-
эффициента передачи.
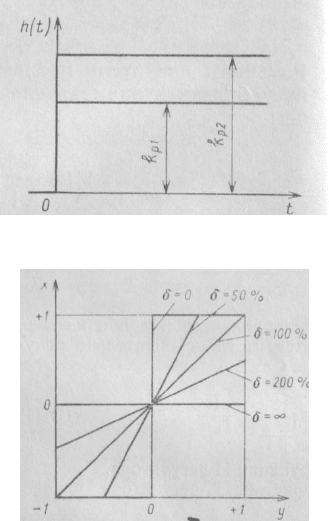
Рис. III-7. Статические характеристики П-регулятора при разных значениям пре-
дела пропорциональности.
119
Рис. III-9. Структурная схема П-регулятора.
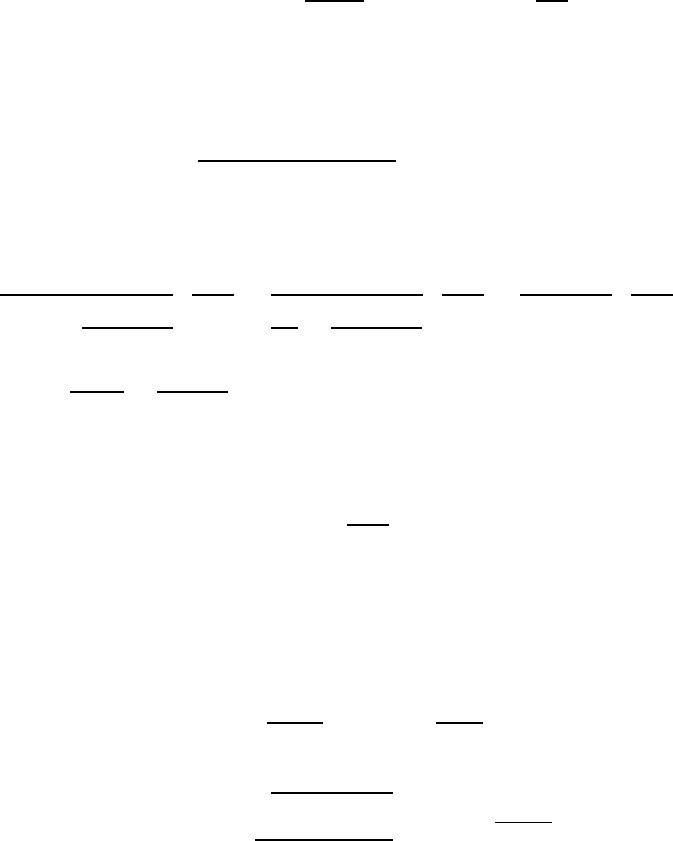
Рис. III-10. Переходные характеристики пропорциональной h
П
(t) и интегральной
h
И
(t) составляющих и общая переходная характеристика h
ПИ
(t) ПИ-регулятора.
Семейство статических характеристик П-регулятора при различных
значениях (6 приведено на рис. III-7. При δ=100% изменению входной вели-
чины регулятора у на 1% диапазона ее изменения соответствует изменение
выходной величины х на 1% диапазона ее изменения.
При крутой статической характеристике (δ <100%) пропорциональная
зависимость между величинами х и у наблюдается только внутри границ пре-
дела пропорциональности. Значениям параметра за границами предела про-
порциональности соответствуют либо максимальное, либо минимальное зна-
чения х. При δ = 0% П-регулятор работает как двухпозиционный.
При пологой статической характеристике (δ > 100%) полное измене-
ние входного сигнала приводит к частичному изменению величины х. По-
следняя не достигает ни одного, ни другого крайнего значений. При δ = ∞
(статическая характеристика — горизонтальная прямая) изменение входа у
вообще не приводит к изменению выходной величины. Таким образом, сте-
пень влияния входной величины П-регулятора на выходную возрастает с
уменьшением значения предела пропорциональности.
Предел пропорциональности δ связан с коэффициентом передачи ре-
гулятора k
р
соотношением
(III, 22)
В динамическом отношении П-регулятор представляет собой усили-
тельное звено (см. табл. I.3).

120
Переходная характеристика П-регулятора определяется выражением
(
)
(III, 23)
Вид переходной характеристики приведен на рис. III-8. Для идеально-
го П-регулятора она представляет собой ступенчатую функцию с ординатой,
равной k
p
.
Сравнение уравнений (III,15) и (III,23) показывает, что П-регулятор
реагирует на входные возмущения значительно быстрее, чем И-регулятор.
Передаточная функция П-регулятора имеет вид
(
)
(III, 24)
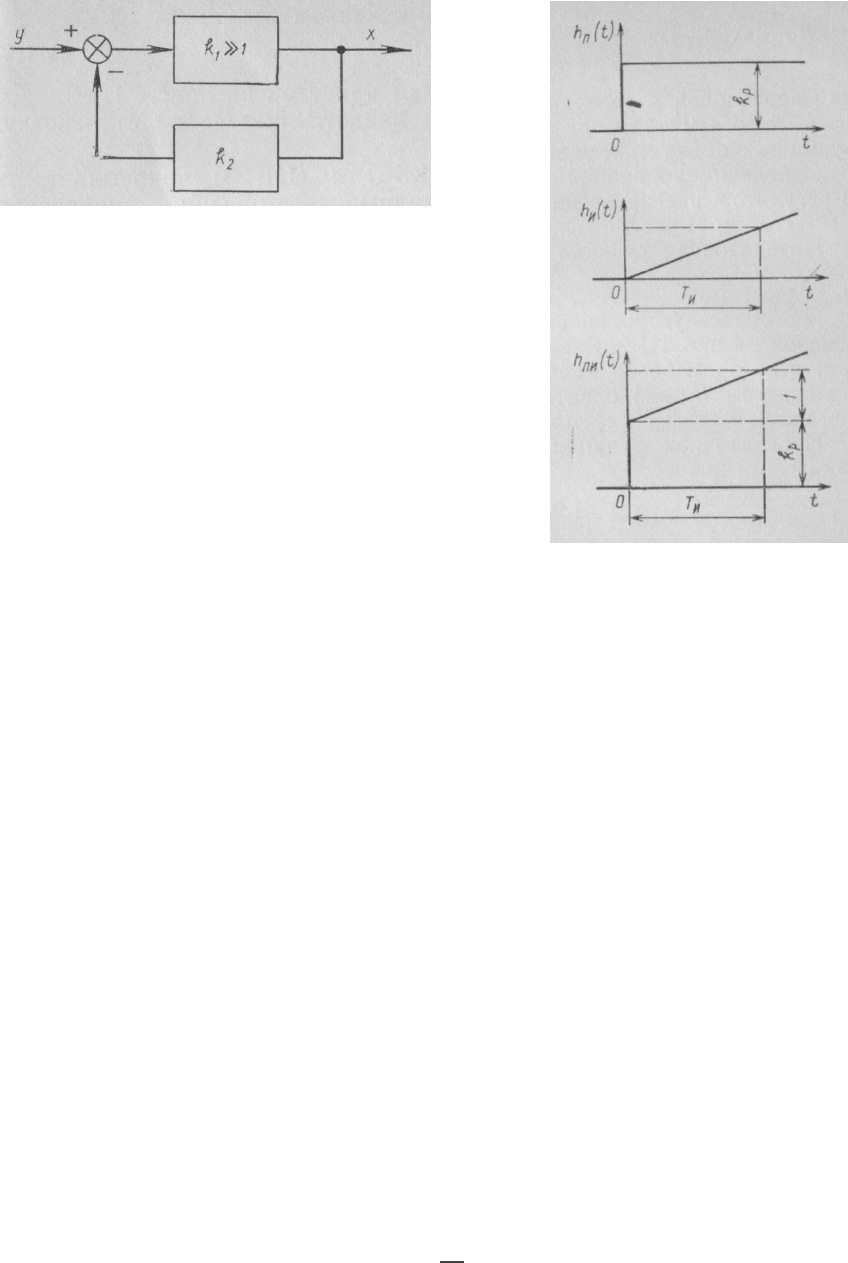
Пример структурной схемы промышленного П-регулятора показан на
рис. III-9. Схема представляет собой замкнутый контур, в котором звено
прямой связи с большим коэффициентом усиления k
1
(k
1
>>l) охватывается
звеном отрицательной обратной связи с коэффициентом усиления k
2
.
Передаточная функция системы, приведенной на рис. III-9, равна
(
)
(III, 25)
Таким образом, величина коэффициента усиления П-регулятора k
p
определяется коэффициентом усиления звена обратной связи k
2
.
Амплитудно-фазовая характеристика П-регулятора выражается сле-
дующим образом
(
)
(III, 26)
При гармоническом изменении входной величины выходная величина
П-регулятора изменяется по гармоническому закону без запаздывания; при
этом амплитуда выходных колебаний в k
p
раз больше (или меньше) амплиту-
ды входных колебаний. На произвольное изменение входной величины П-
регулятор реагирует таким же по форме изменением выходной величины.
Пропорционально-интегральные регуляторы (ПИ-регуляторы). Их
выходная величина изменяется под действием пропорциональной и инте-
гральной составляющих. Уравнение динамики ПИ-регулятора имеет вид
∫
(III, 27)
где k
p
—коэффициент передачи регулятора; T
и
— время интегри-
рования.
ПИ-регулятор имеет два параметра настройки. Пропорциональная со-
ставляющая настраивается с помощью предела пропорциональности δ, инте-
гральная составляющая регулятора —
121
Рис. III-11. Структурные схемы ПИ-регулятора.
посредством изменения времени интегрирования Т
и
. Воздействие входной
величины ПИ-регулятора на выходную повышается с уменьшением предела
пропорциональности δ и уменьшением времени интегрирования Т
и
.
Переходная характеристика ПИ-регулятора описывается за-
висимостью
(
)
(III, 28)
На рис. III-10 приведены переходные характеристики пропор-
циональной составляющей h
П
(t), интегральной составляющей h
И
(t) и пере-
ходная характеристика ПИ-регулятора h
ПИ
(t). Из рисунка видно, что пропор-
циональная составляющая действует одновременно с изменением входной
величины регулятора, а интегральная составляющая — и после изменения
входной величины.
Для нахождения передаточной функции ПИ-регулятора приведем
уравнение динамики (III,27) к операторной форме
(
)
(
)
( )
откуда получим
(
)
(III, 29)
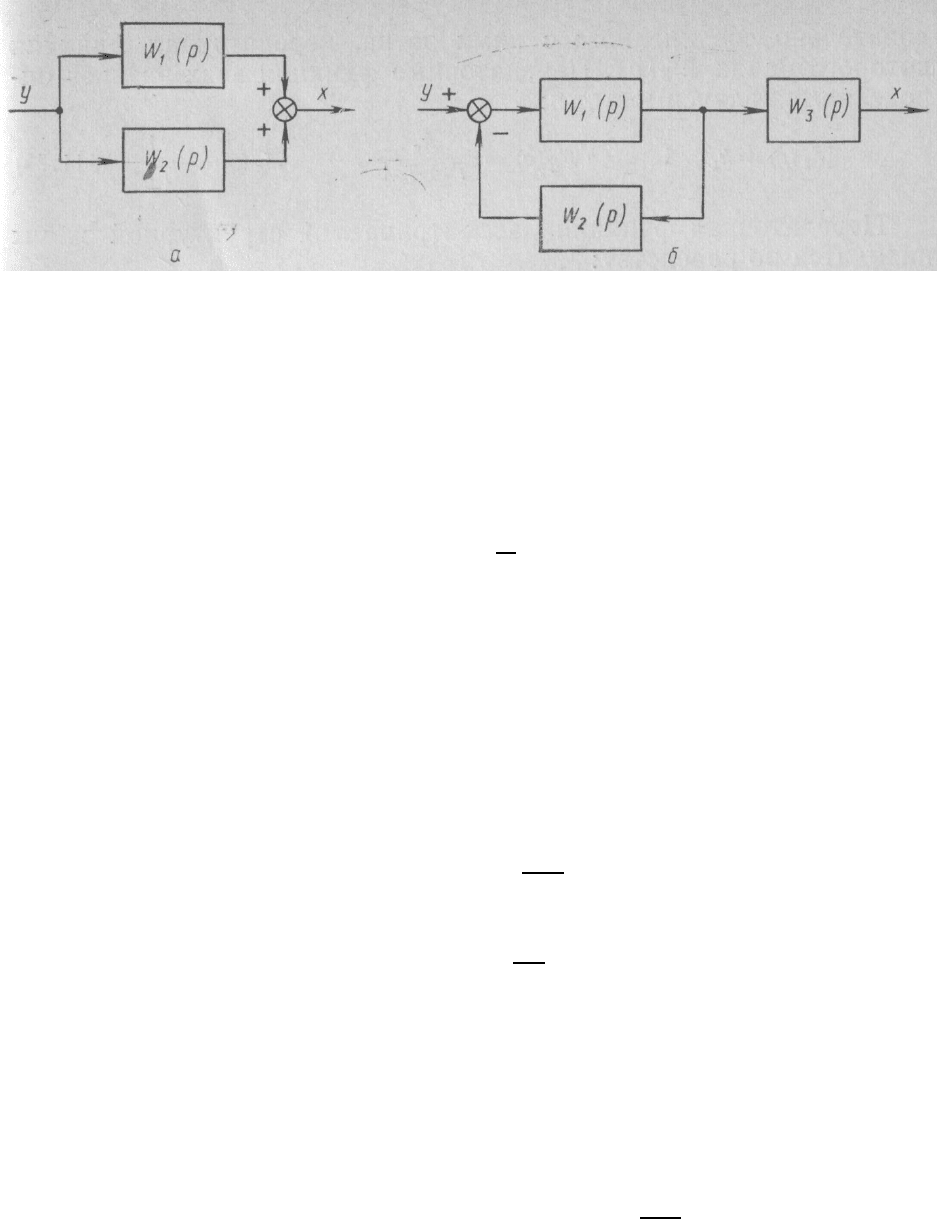
Промышленные ПИ-регуляторы обычно составляются в соответствии
со структурными схемами, приведенными на рис. III-11. Структурная схема,
приведенная на рис. III-11,а, содержит два параллельно соединенных звена:
усилительное (передаточная функция W
1
(p)=k
p
) и интегрирующее [переда-
точная функция W
2
(p) = 1/(Т
и
р)]. Передаточная функция такой системы W(p)
находится из равенства:
(
)
(
)
(
)
которое совпадает с выражением (III,29).
Структурная схема, показанная на рис. III-11,б состоит из звена (пере-
даточная функция W
1
(p)), охваченного отрицательной обратной связью (пе-
редаточная функция W
2
(p))
122
и последовательно соединенного с ними звена, передаточная функция кото-
рого равна W
3
(p). Передаточные функции этих звеньев определяются зави-
симостями:
(
)
(
)
(
)
(III, 30)
Передаточная функция рассматриваемой структурной схемы находит-
ся по равенству:
(
)
(
)
(
)
(
)
(
)
После подстановки в него зависимостей (III,30) получим
(
)
Обозначая T
2
/(k
2
T
1
) через k
р
, a l/(k
2
T
1
) через 1/Т
и
, окончательно полу-
чим
(
)
Это выражение совпадает с зависимостью (III,29).
Для нахождения амплитудно-фазовой характеристики ПИ-регулятора
в уравнении (III,29) комплексную величину р заменим на мнимую iw и, осво-
бождаясь от мнимости в знаменателе, получим
(
)
или в показательной форме
(
)
(
)
(
)
√
(III, 31)
График АФХ ПИ-регулятора см. ниже в табл. III.9.
При гармоническом изменении входной величины выходная величина
ПИ-регулятора также испытывает гармонические колебания, амплитуда и
фазовый сдвиг которых зависят от частоты колебаний w и величины настро-
ечных параметров регулятора k
p
и Т
и
. С возрастанием со от 0 до +∞ АЧХ ре-
гулятора монотонно уменьшается от ∞ до значения k
p
, а запаздывание выход-
ных колебаний по фазе относительно входных постепенно уменьшается от
величины —π/2 до 0 (см. ниже в табл. III.9).
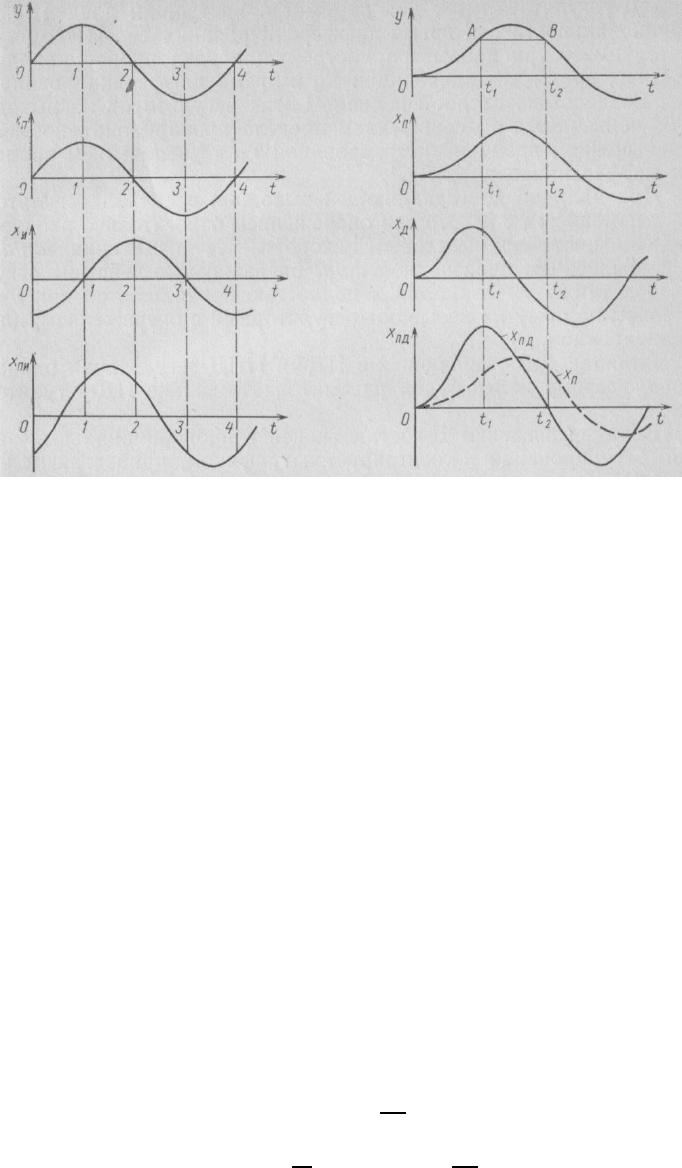
Реакция ПИ-регулятора x
пи
и отдельных его составляющих x
П
и x
И
на
гармоническое изменение входной величины показана на рис. III-12. Значе-
ние выходной величины x
пи
получено алгебраическим сложением величин x
П
и x
И
. Сравнение этих, зависимостей
123
Рис. III-12. График изменения составляющих x
П
, x
И
и общей выходной
величины x
ПИ
ПИ-регулятора при гармоническом изменении входной вели-
чины у.
показывает, что величина х
пи
всегда реагирует медленнее, чем x
п
, но быстрее,
чем х
и
, и, следовательно, на одинаковое изменение входной величины ПИ-
регулятор будет реагировать с некоторым отставанием по сравнению с П-
регулятором, но всегда будет опережать действие И-регулятора.
Пропорционально-дифференциальные и пропорционально интегрально
дифференциальные регуляторы (ПД- и ПИД - регуляторы). В ряде случаев
качество регулирования можно повысить введением в закон регулирования
составляющей, пропорциональной первой производной или скорости изме-
нения входной величины регулятора. Эта дифференцирующая составляющая
(Д-составляющая) формируется при помощи дополнительного устройства.
Уравнения динамики ПД- и ПИД - регуляторов имеют вид
(III, 32)
∫
(III, 33)
где k
p
— коэффициент передачи регулятора; Т
и
— время интегрирова-
ния; T
д
— время дифференцирования.