Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

ем величины подводимого постоянного напряжения. Благо-
я своим хорошим регулировочным качествам вентильные
ргатели получили широкое применение для привода различных
:ышленных машин и механизмов.
Электропривод но системе транзисторным коммутатор -
вентильный двигатель с постоянными магнитами
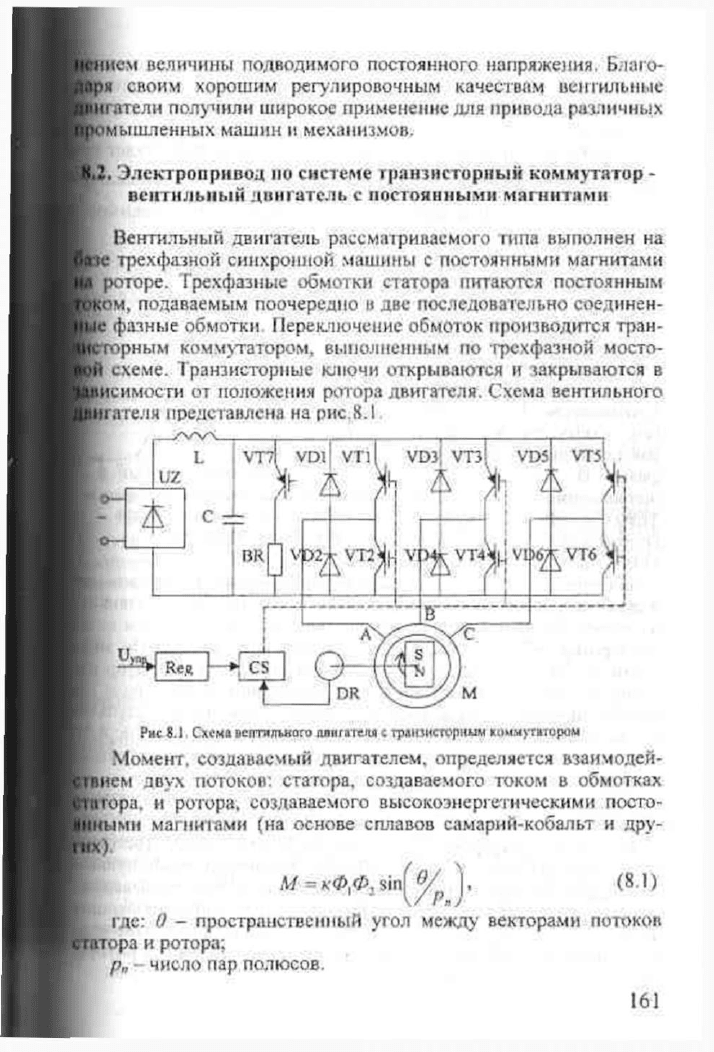
Вентильный двигатель рассматриваемого типа выполнен на
трехфазной синхронной машины с постоянными магнитами
)ре. Трехфазные обмотки статора питаются постоянным
)М, подаваемым поочередно в две последовательно соедннен-
фазные обмотки Переключение обмоток производится тран-
рным коммутатором, выполненным по трехфазной мосто-
|
схеме. Транзисторные ключи открываются и закрываются в
имости от положения ротора двигателя. Схема вентильного
Цгателя представлена на
рис.
8.1
L I \тт| VDl| VTlj VD3| VT3; VD5 VTsI
h Л
П ft & Л Ф
г r -L I L
Рнс Схема пептплъкого umirnreiui с тршонсторкым коммутаторам
1
Момент, создаваемый двигателем, определяется взаимодей-
_ем двух потоков: статора, создаваемого током в обмотках
>ра. и ротора, создаваемого высокоэнергетическими посто-
выми магнитами (на основе сплавов самарий-кобальт и дру-
)
М = кФ)Ф
г
)•
(8.1)
где: 0 - пространственный угол между векторами потоков
втора и ротора;
р„ - число пар полюсов.
Магнитный поток статора стремится повернуть ротор с по-
стоянными магнитами, так, «гтобы поток ротора совпал по на-
правлению с потоком статора (вспомним магнитную стрелку
компаса) [1-8].
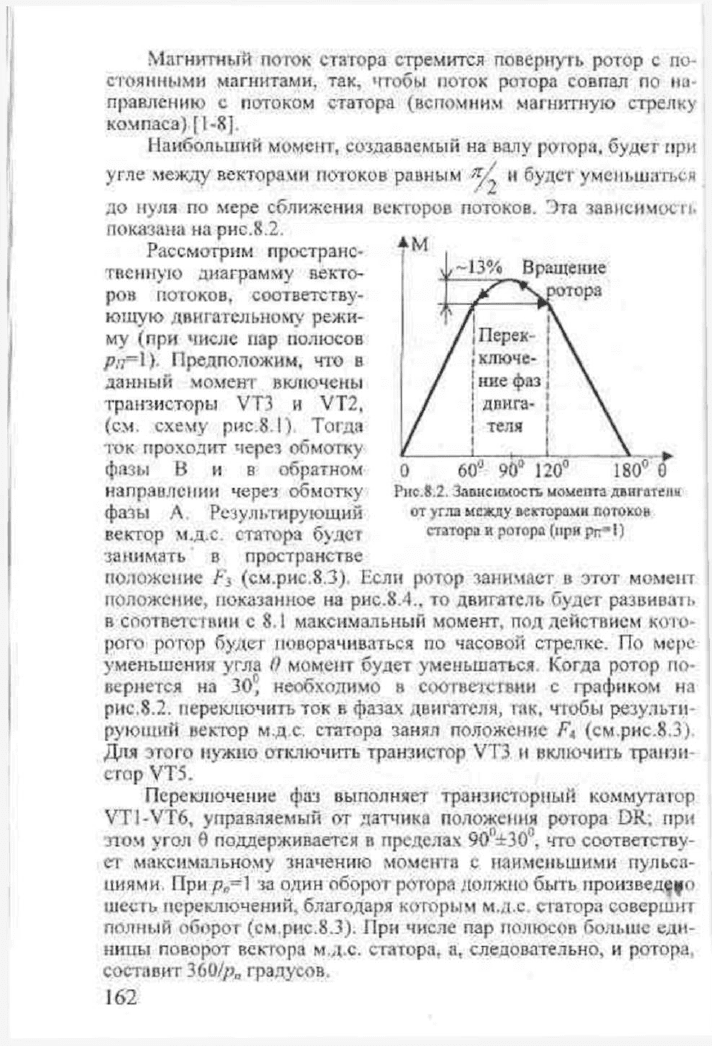
Наибольший момент, создаваемый на валу ротора, будег при
угле между векторами потоков равным ^
н
будет уменьшаться
до нуля по мере сближения векгоров потоков. Эта зависимость
показана на рис.8.2.
Вращение
ра
Перек-
; ключе- ,
i
1ше фаз!
! двнга- !
I теля
180° О"
0 60° 90° 120°
Рис.8.2. Зависимость момента двигатели
от угла между векторами потоков
статора
и
ротора Гири
рк*
I)
Рассмотрим пространс-
твенную диаграмму векто-
ров потоков, соответству-
ющую двигательному режи-
му (при числе пар полюсов
/?,7=1). Предположим, что в
данный момент включены
транзисторы VT3 и VT2,
(см. схему рис.8.1) Тогда
гок проходит через обмогку
фазы Вив обратном
направлении через обмотку
фазы А Результирующий
вектор м.д.с. статора будет
занимать в пространстве
положение Ух (см.рис.8.3). Если ротор занимает в этот момент
положение, показанное на рис.8.4.. то двигатель будет развивать
в соответствии с 8.1 максимальный момент, под действием кото-
рого ротор будет поворачиваться по часовой стрелке. По мере
уменьшения утла 0 момент будет уменьшаться. Когда ротор по-
вернется на 30* необходимо в соответствии с графиком на
рис.8.2. переключить ток в фазах двигателя, тк, чтобы результи-
рующий вектор м.д.с. статора занял положение F\ (см.рнс.8.3)
Для этого нужно отключить транзистор VT3 и включить транзи-
стор VT5.
Переключение фаз выполняет транзисторный коммутатор
VT1-VT6, управляемый от датчика положения ротора DR; при
пом угол в поддерживается в пределах 90 i30°, что соответству-
ет максимальному значению момента с наименьшими пульса-
циями. При р„=] за один оборот ротора должно быть произведен
шесть переключений, благодаря которым м.д.с. статора совершит
полный оборот (см.рнс.8.3). При числе пар полюсов больше еди-
ницы поворот вектора м.д.с. статора, а, следовательно, и ротора,
составит 360/р
п
градусов.
162
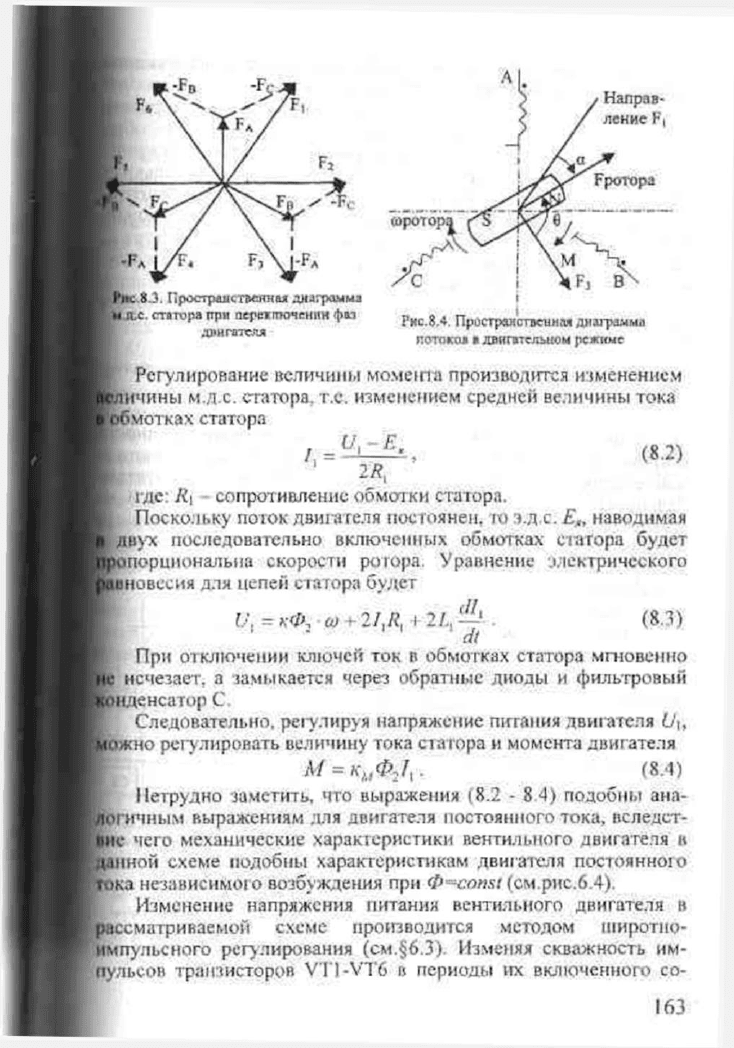
Направ-
ление Fi
Fporopa
:.8.3. Пространственная диаграмма
It статора ггри перехпточеннн фаз
д]»нгатсля
Рис.8,4. Пространственная диаграмма
потоков • двигвтельиом рсж1шс
Регулирование величины момент производится изменением
ины м.д.с. статора, т.е. изменением средней величины тока
Мотках статора
(8.2)
щ
где: R\
-
сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то .э.д.с. £,, наводимая
ух последовательно включенных обмотках статора будет
горциональна скорости ротора. Уравнение электрического
новсеия для цепей статора будет
И.=КФ, OJ+2LR. I 2/., —
1
dt
(S.3)
При отключении ключей ток в обмотках статора мгновенно
[исчезает, а замыкается через обратные диоды и фильтровый
енсатор С
Следовательно, регулируя напряжение питания двигателя U\
t
о регулировать величину тока статора и момента двигателя
А/ = . (8.4)
Нетрудно заметить, что выражения (8.2 - 8 4) подобны ана-
Гичным выражениям для двигателя постоянного тока, вследст-
чего механические характеристики вентильного двигателя в
ной схеме подобны характеристикам двигателя постоянного
ка независимого возбуждения при Ф^сот( (см.рнс.6.4).
Изменение напряжения питания вентильного двигателя в
сматриваемой схеме производится методом широтио-
пульсного регулирования (см.§6.3). Изменяя скважность им-
льсов транзисторов VT1-VT6 в периоды их включенного со-
стояния, можно регулировать среднюю величину напряжения,
подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы
транзисторного коммутатора должен быть изменен таким обра-
зом, чтобы вектор м.д.с. статора отставал от вектора потока рото-
ра. Тогда момент двигателя станет отрицательным. Поскольку на
входе преобразователя установлен неуправляемый выпрямитель,
то рекуперация энергии торможения в данной схеме невозможна
При торможении происходит подзаряд конденсатора фильтра С.
Ограничение напряжения на конденсаторах осуществляется пу-
тем подключения разрядного сопротивления через транзистор
VT7 [1-8]. Таким образом, энергия торможения рассеивается в
разрядном сопротивлении.
8.3. Электропривод по системе тнрнсторный коммутатор
- синхронный двигатель
В вентильном двигателе средней и большой мощности
обычно используются синхронные двигатели обычной конструк-
ции с электромагнитным возбуждением. Поскольку двигатели
большой мощности имеют напряжение статора 6,0 или 10,0кВ, то
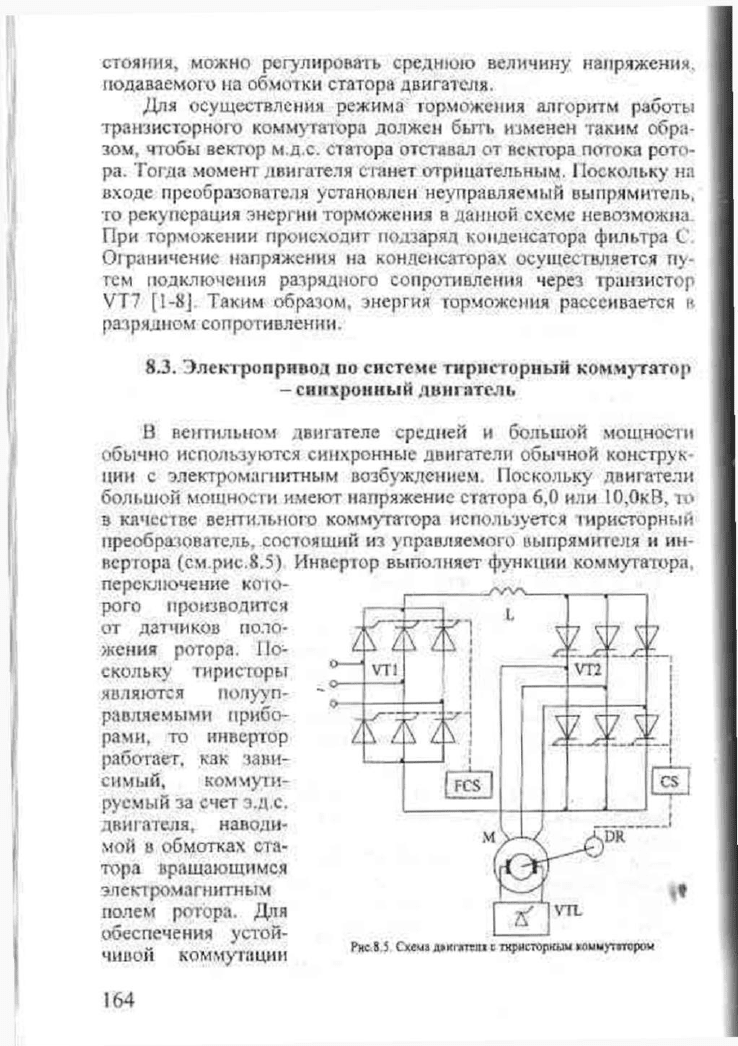
в качестве вентильного коммутатора используется тиристорный
преобразователь, состоящий из управляемого выпрямителя и ин-
вертора (см.рис.8.5) Инвертор выполняет функции коммутатора,
переключение кото-
рого производится
от датчиков поло-
жения ротора. По-
скольку тиристоры
являются полууп-
равляемыми прибо-
рами, то инвертор
работает, как зави-
симый, коммути-
руемый за счет э.д.с.
двигателя, наводи-
мой в обмотках ста-
тора вращающимся
электромагнитным
полем ротора. Дчя
обеспечения устой-
чивой коммутации
Рис.8.5 Схема д»кг*топ с ткрмсторкым мымутсром
пичнну тока,
Ьжно ИЗ.МС-
|ть момент,
ввиваемый
Вгателем.
аудирование
Ьростн в при-
мах рассмат-
|ВПемогО типа
нмчно произ-
юнтся введе-
Кем внешнего
Ьпура регу-
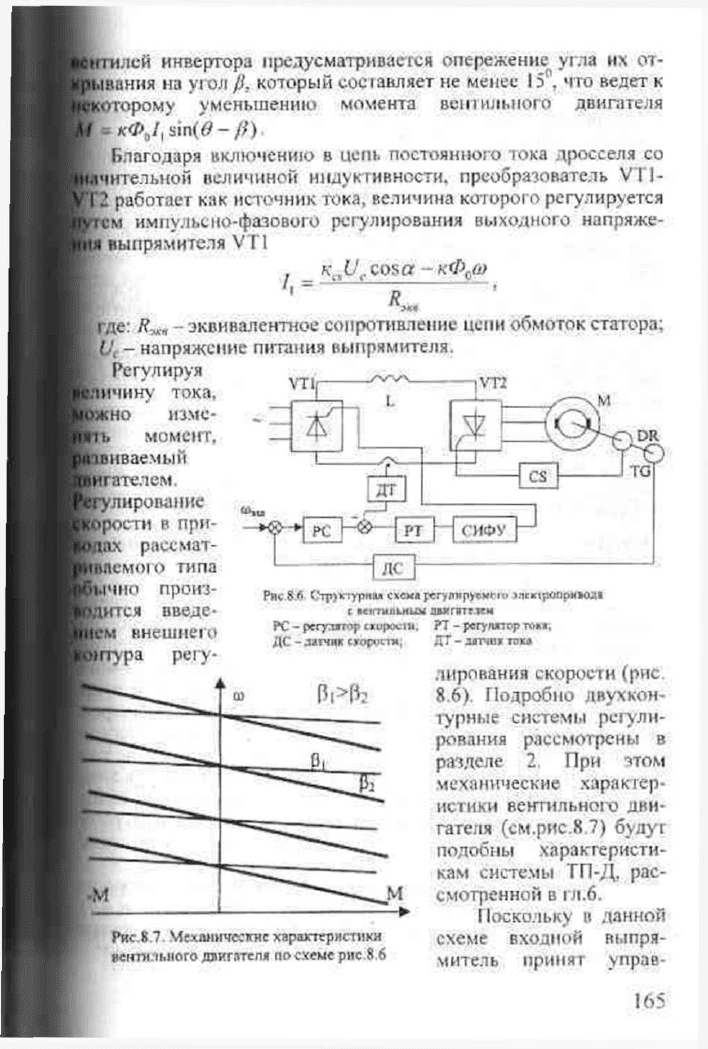
илей инвертора предусматривается опережение угла их от-
шання на угол Д который составляет не менее 15 , что ведет к
горому уменьшению момента вентильного двигателя
I Благодаря включению в цепь постоянного тока дросселя со
1чительной величиной индуктивности, преобразователь VT1-
"2 работает как источник тока, величина которого регулируется
!м импульсно-фазового регулирования выходного напряже-
I* выпрямителя VT1
_ cos а - кФ
0
о)
fae: Rw, - эквивалентное сопротивление цепи обмоток статора;
[U
c
- напряжение питания выпрямителя.
Регулируя
—.
'
q>
Pi
- *
fl
!
•
Рис.8.7. Механические характеристики
вентильного дакгатсля но схеме рнс.8.6
Рис.8.6
Отр)>пур11ал
схема
регулируешь» элсюропрмвояв
с neirmiikrtux двипггг.тем
PC
-
регулятор cxupociи. ?Т - регулятор
тон»,
ДС - Л2ТЧП1С ежоррегл,
ДТ -
логга*
тока
лнрования скорости (рис.
8.6). Подробно двухкон-
турные системы регули-
рования рассмотрены в
разделе 2, При этом
механические характер-
истики вентильного дви-
гателя (см.рис.8.7) булуг
подобны характеристи-
кам системы ТП-Д. рас-
смотренной в гл.6.
Поскольку в данной
схеме входной выпря-
митель принят управ-
ляемым. го возможен режим рекуперативного торможения, когда
э.д.с. двигателя кФ./о > K
ct
U
c
cos а
•
cos (5.
Определенным недостатком рассматриваемой схемы являет-
ся усложнение коммутации тиристоров инвертора при малых
скоростях (ниже
0.1
wj, т.к. при этом э.д.с. двигателя становится
недостаточной для естественной коммутации вентилей зависимо-
го инвертора. В этом случае, при пуске двигателя до скорости
0,lft>i Для коммутации вентилей инвертора приходится прерывать
ток, запирая тиристоры выпрямителя, что усложняет схему его
управления
В последние годы с появлением запираемых тиристоров ста-
ли применять схемы с принудительной коммутацией вентилей
инвертора, что повышает регулировочные свойства вентильного
двигателя и дает возможность его использования для динамич-
ных электроприводов с широким диапазоном регулирования ско-
рости.
Глава 9. Способы регулирования асинхронного двигателя
9.1. Классификация способов регулирования асинхронного
двигателя
Асинхронный двигатель является наиболее массовым
электрическим двигателем. Эти двигатели выпускаются мощно-
стью от
0,1
кВт до нескольких тысяч киловатт и находят приме-
нение во всех отраслях хозяйства. Основным достоинством асин-
хронною двигателя является простота его конструкции и невы-
сокая стоимость. Однако по принципу своего действия асинхрон-
ный двигатель в обычной схеме включения не допускает регули-
рования скорости его вращения (см.гл.4). Особое внимание сле-
дует обратить на то, ЧТО во избежание значительных потерь энер-
гии, а, следовательно, для короткозамкнутых асинхронных двига-
телей во избежание перегрева его рогора. двигатель должен рабо-
тать в длительном режиме с минимальными значениями сколь-
жения.
Рассмотрим возможные способы регулирования скорости
асинхронных двигателей (см.рис.9.1). Как следует из (4.6 и
скорость двигателя определяется двумя параметрами: скоростью
вращения электромагнитного ноля статора шо и скольжением v
(9.1)
a>
= Q)
0
- cv
s
s
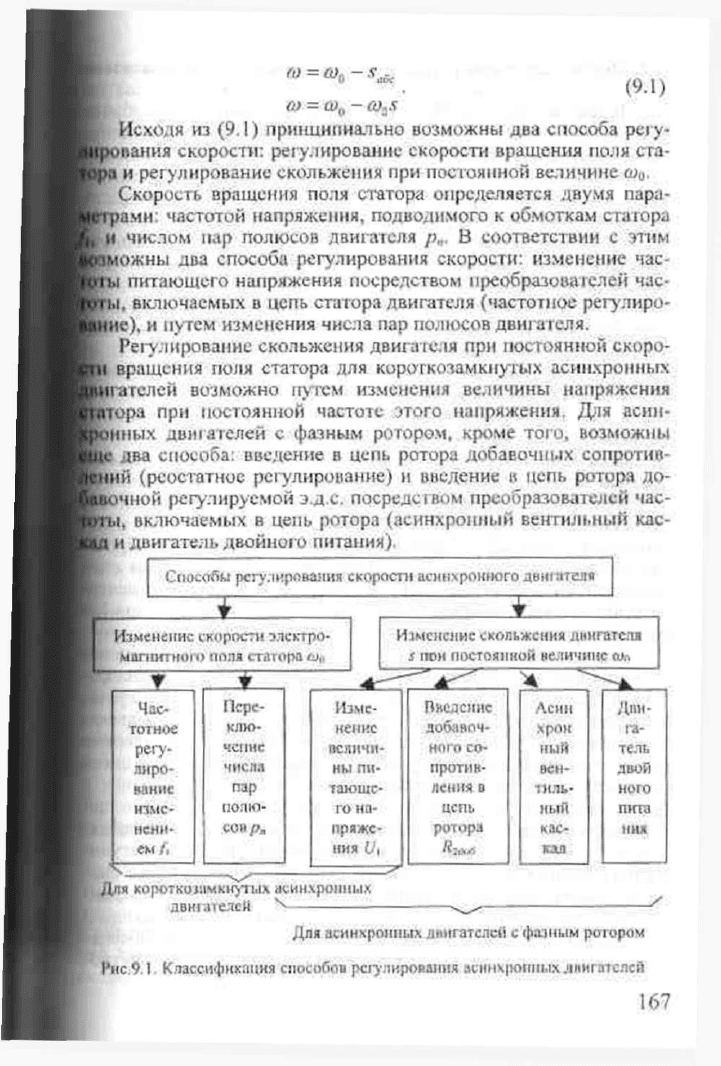
Исходя из (9. Г) принципиально возможны два способа рсгу-
Ьования скорости: регулирование скорости вращения поля ста-
ри и регулирование скольжения при постоянной величине о)
0
.
Скорость вращения поля статора определяется двумя пара-
Ирами частотой напряжения, подводимого к обмоткам статора
и числом пар полюсов двигателя р
а
. В соответствии с этим
оможны два способа регулирования скорости: изменение час-
питающего напряжения посредством преобразователей час-
I, включаемых в цепь статора двигателя (частотное регулиро-
вке), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скоро-
£ вращения поля статора для короткозамкнутых асинхронных
тслей возможно путем изменения величины напряжения
ра прн постоянной частоте этого напряжения. Для асин-
ных двигателей с фазным ротором, кроме того, возможны
два способа: введение в цепь ротора добавочных сопротив-
ий (реостатное регулирование) и введение в цепь ротора до-
мной регулируемой э.д.с. посредством преобразователей час-
1, включаемых в цепь ротора (асинхронный вентильный кас-
и двигатель двойного питания).
Способы регулирования скорости асинхронного двигателя
Изменение скорости электро-
магнитного поля статора
oj„
t
Час-
Псре-
тотное
клю-
регу-
чепне
ЛИрО-
числа
вание
пар
изме-
полю-
нени-
сов Ря
ем Л
Изменение скольжения дннгатсля
s пой постоянной величине ом
Изме-
Введение
нение
добавоч-
величи-
ного со-
ны пи-
против-
тающе-
ления в
го
на-
цепь
пряже-
ротора
ния V|
Нщл
Дснн
хрон
ный
вен-
тиль-
ныЛ
к ас-
кап
pin
я короткозамкнутых асинхронных
двигателей ^
Дви-
га-
тель
двой
ного
П1ГПЗ
НИН
Для асинхронных двигателей с'фаэным ротором
Рнс;9.1. Классификация способов регулирования асинхронных дпигатслсй
9.2. Оценка способов регулировании асинхронного двигателя
В настояшее время благодаря развитию силовой преобразо-
вательной техники созданы и серийно выпускаются различные
виды полупроводниковых преобразователей частоты, что опре-
делило опережающее развитие и широкое применение частотно-
регулируемого асинхронного электропривода. Основными досто-
инствами этой системы регулируемого электропривода являются
- плавность регулирования и высокая жесткость механиче-
ских характеристик, что позволяет регулировать скорость в ши-
роком диапазоне;
- экономичность регулирования, определяемая тем. что
двигатель работает с малыми величинами абсолютного скольже-
ния. и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются слож-
ность и высокая стоимость (особенно для приводов большой
мощности) преобразователей частоты и сложность реализации в
большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования ско-
рости асинхронного двигателя рассмотрены в главе 10
Изменение скорости переключением числа пар полюсов
асинхронного двигателя (см.4) позволяет получать несколько
(от 2 до 4) значений рабочих скоростей, т.е. плавное регулирова-
ние скорости и формирование переходных процессов при этом
способе невозможно. Поэтому данный способ имеет определен-
ные области применения, но не может рассматриваться, как ос-
нова для построения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменени-
ем величины питающего напряжения при постоянной (стандарт-
ной) его частоте было подробно рассмотрено в §4.3.2. Было уста-
новлено, что этот способ регулирования для асинхронных двига-
телей с короткоЗам кнуты м ротором имеет весьма ограниченное
применение вследствие того, что регулирование скорости здесь
сопряжено с потерями энергии скольжения, выделяющимися в
роторе двигателя и ведущими к его перегреву. Получаемые при
этом способе механические характеристики (см.рис.4.12) небла-
гоприятны для качественного регулирования. Диапазон регули-
рования не превышает 1,5:1; более глубокое регулирование ско-
рости можно допускать только кратковременно. Исходя из даН1
ной оценки, регулирование изменением величины питающего
напряжения применяется,
г
лавным образом, только для обеспе-
чения плавного пуска нерегулируемых асинхронных электро-
дов или для кратковременного снижения скорости. Иногда
способ регулирования используется для регулирования ско-
насоеов и вентиляторов (механизмов с вентиляторным ха-
>м нагрузки) небольшой мощности (до 15кВт), однако и в
случае необходимо увеличение установленной мощности
ел я.
Для асинхронных двигателей с фазным ротором регулирова-
корости может производиться воздействием на роторную
гдвигателя. При введении добавочного сопротивления в цепь
"а (см.§4.2) энергия скольжения рассеивается не в объеме
вля, а в сопротивлениях. Этот способ регулирования оце-
ся как неэкономичный. При использовании релейно-
горных схем исключается плавность регулирования скоро-
В настоящее время управление с введением добавочных со-
злений в цепь ротора используется, в основном, для пуска
|рсронных двигателей с фазным ротором, а также в крановых
приводах.
се способы регулирования, основанные на изменении
Пения асинхронного двигателя, связаны с выделением энер-
ольжения в роторной цепи двигателя. В рассматриваемых
Ь способах эта энергия расходовалась на нагрев обмотки po-
ll роторных сопротивлений. Существуют системы регули-
joro электропривода, в которых энергия скольжения не теря-
в сопротивлениях, а используется полезно - возвращается в
щую сеть, что делает регулирование в этих системах эко-
нчным. К таким системам регулируемого привода относятся
,|Хронные вентильные каскады и двигатели двойного питания,
системы рассмотрены в главе 11. Особенностью каскадных
асинхронного привода является отраниченный диапазон ре-
новация - Jic больше, чем 2:1. В этом диапазоне каскадные
Ы обеспечивают плавное и экономичное регулирование ско-
Такие системы электропривода наиболее целесообразны
ощных турбомеханизмов - насосов и вентиляторов.
Пива 10. Асинхронный электропривод с частотным регули-
рованием скорости
10.1. Принципы частотного ретулирования
Возможность частотного регулирования скорости асинхрон-
двигателя - регулирование путем изменения частоты ни-
щего напряжения - вытекае
i
из того обстоятельства, что ско-
рость вращения электромагнитного поля статора пропорциональ-
на частоте питающего напряжения
2лг •/,
(Or,
-
Р,
(101)
Следует также учесть, что поскольку с изменением частоты
питающего напряжения изменяется и величина потока двигателя
Фи
(10.2)
Щ Щ
го и большинстве случаев одновременно с изменением частоты
питающего напряжения необходимо регулировать и его величи-
ну. причем регулирование напряжения следует производить та-
ким образом, чтобы скольжение двигателя было минимальным.
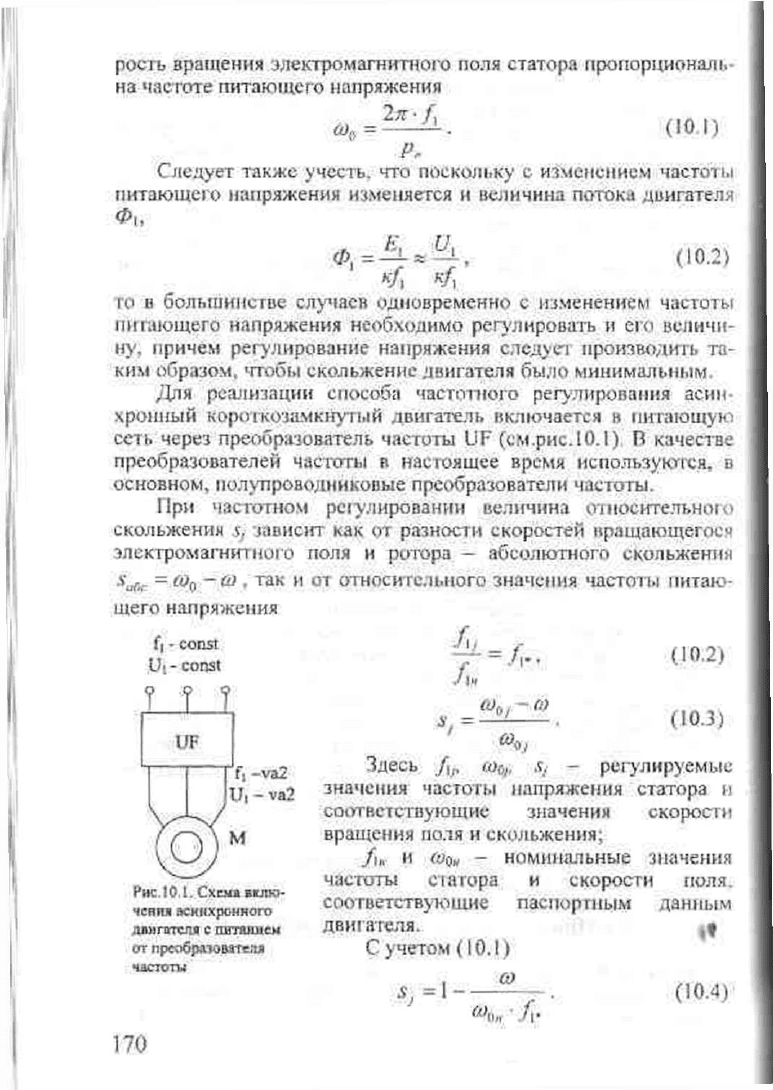
Для реализации способа частотного регулирования асин-
хронный короткозамкнутмй двигатель включается в питающую
сеть через преобразователь частоты UF (см.рис
Л 0.1).
В качестве
преобразователен частоты в настоящее время используются, в
основном, полупроводниковые преобразователи частоты.
При частотном регулировании величина относительною
скольжения ч, зависит как от разности скоростей вращающегося
электромагнитного поля и ротора — абсолютного скольжения
Sgfc = (Oq — to
. так и от относительного значения частоты питаю-
щего напряжения
fi - const
I). - const
llL= f
f
(O
0/
- 0)
CO.
(Ю.2)
(10.3)
Рис.!0.1. Схема вклю-
чения асинхронного
двигателя с питанием
от преобразователя
частоты
Здесь Д., щ, s. - регулируемые
значения частоты напряжения статора и
соответствующие значения скорости
вращения ноля н скольжения;
/,„ И (oq* - номинальные значения
частоты
см а
гора и скорости поля,
соответствующие паспортным данным
двигателя.
С учетом (ЮЛ)
Sj=
I
^-р-. 00.4)
Щп А•